一种新型载物台及其控制系统
文献发布时间:2024-01-17 01:28:27
技术领域
本发明专利涉及的是芯片检测工具领域,特别是涉及一种新型载物台及其控制系统,具体的说,是一种能够承载芯片进行准确位置定位和旋转定位的新型载物台及其控制系统。
背景技术
在机械制造方面,伴随着科学技术的发展,机械制造技术不断升级,使机械制造不管是在外观、材料还是性能上都有了大幅度的提高;在控制系统方面,控制方式也向着越来越智能化的方向发展,其对人力的依赖也越来越低。半导体芯片在生产过程中会进行多次过程检测。晶圆、晶粒通常会被贴在膜上,放到高倍镜头下进行人工目检或机器视觉检测。根据检测的需要,对承载半导体芯片的载物台有非常高的要求。传统的载物台大多是通过手动控制,极其依赖于相关的工作人员,运动方向有限,运行稳定性差,控制精度低,主观误差大,无法实现远程控制,在实际应用过程中有很大的局限性,且半导体芯片生产过程中,很多情况下都需要承载芯片完成检测的载物台低速运转,运行精度高,定位准确,却具有灵活的控制方式等要求。
为了能更好地满足半导体芯片检测的需求,根据半导体芯片生产自动化生产线的要求,本发明设计一种新型的载物台及其控制系统,结合伺服电机高精度、高稳定性等优点,在PLC控制器的总体控制下,构造一种智能化,稳定性高,定位精确的自动化的新型载物台及其控制系统。
发明内容
针对上述技术需求,本发明专利提供了一种能够多方向运动、运行平稳、控制精度高、能够远程控制的新型载物台及其控制系统。
本发明专利提出了一种新型载物台及其控制系统,其特征在于新型载物台包括底座、X轴滚珠丝杠、螺母、X轴导轨、X轴滑板、Y轴滑板、光轴、Z轴滑板、输入轴、小齿轮、键、测量载物台、大齿轮、输出轴、滚动轴承、Z轴滚珠丝杠、螺栓、Y轴滚珠丝杠、滑块、Y轴导轨、X轴伺服电机、Y轴伺服电机、Z轴伺服电机、旋转伺服电机、PLC控制器、伺服电机驱动器、人机界面(HMI)、测量载物台;所述底座固定在光滑的水平面上,起到承载整个载物台的作用,并且在底座之上安装X轴导轨,用以实现X轴方向的平移;X轴滚珠丝杠上的螺母通过螺栓固定在X轴滑板上,螺母将X轴滚珠丝杠的旋转运动转化为X轴滑板的水平直线移动,其中X轴滑板通过滑块与X轴导轨连接,X轴导轨对X轴滑板的运动起到了导向作用,使X轴滑板能够沿X轴方向水平移动,所述X轴滚珠丝杠与X轴伺服电机连接,用以实现X轴方向的驱动;所述X轴滑板与其上面的Y轴导轨通过螺栓固定连接,X轴滑板对其上面的载物台部件起承重作用;所述Y轴滚珠丝杠与Y轴伺服电机连接,并与Y轴滑板相互连接,Y轴滑板伸出的弯角内部刻有丝杠螺母,其中Y轴滑板与Y轴导轨通过滑块连接,Y轴导轨对Y轴滑板的移动起到导向作用,Y轴伺服电机转动可以拖动Y轴滑板在Y轴方向上进行水平移动;所述光轴7(2根)底部与Y轴滑板固定连接,光轴7(2根)穿过Z轴滑板上的两个孔,Z轴滑板可以沿着光轴7(2根)上下滑动,光轴7(2根)具有Z轴导向的作用,所述Z轴滚珠丝杠与Z轴伺服电机固定连接,Z轴伺服电机转动带动滚珠丝杠,滚珠丝杠拖动Z轴滑板沿着光轴7(2根)上下滑动,光轴(2根)穿孔Z轴滑板可以克服由Z轴伺服电机带来的倾覆力矩;所述旋转伺服电机通过联轴器与输入轴相互连接,小齿轮通过键与输入轴相互连接,小齿轮与大齿轮相互啮合,大齿轮与输出轴固定连接,小齿轮与大齿轮共同配合实现降速功能,同时传递输出轴旋转运动;所述滚动轴承嵌套于输出轴与Z轴滑板之间,实现输出轴与Z轴滑板的连接,同时消除旋转伺服电机给Z轴滑板带来的旋转运动;所述测量载物台可以用于放置相关测量的半导体芯片;所述PLC控制器通过以太网与HMI相互传递信号,并且向伺服电机驱动器发送控制脉冲,分别控制X轴伺服电机、Y轴伺服电机、Z轴伺服电机和旋转伺服电机拖动对应的滑板运动,进而带动载物台移动至预设位置,并旋转至预设方位角度。
上述的一种新型载物台及其控制系统中,所述小齿轮与大齿轮相啮合,大齿轮与输入轴固定连接,传递Z轴旋转运动。
上述的一种新型载物台及其控制系统中,所述伺服电机通过其内置编码器与伺服电机驱动器组成闭环控制。
上述的一种新型载物台及其控制系统中,所述PLC控制器通过以太网与人机界面(HMI)相连,可以通过人机界面(HMI)设定目标位置和方位角度,可以通过人机界面(HMI)实时监测载物台控制系统的工作状态。
与现有技术相比,本发明专利的优点是:
1、本实发明专利通过PLC控制器控制伺服电机,一方面:伺服电机与滚珠丝杠相连接,滚珠丝杠再与各个方向上的滑板和光轴相连接,实现载物台在XY轴的水平运动和Z轴的垂直运动;另一方面:伺服电机通过联轴器与固定有小齿轮的输入轴连接,小齿轮与大齿轮相啮合,大齿轮与输出轴固定连接,实现载物台的定点旋转运动。
2、本发明专利通过伺服电机内置的编码器采集相应的脉冲信号作为反馈信号送回给伺服电机驱动器,伺服电机驱动器将反馈值与目标值进行比较,形成闭环控制,实现精确位置定位与转速角度定位。
3、本发明专利通过以太网使PLC控制器与HMI之间能够相互传递信号,使得工作人员能够远程控制载物台的运动并实时监测载物台的工作状况。
附图说明
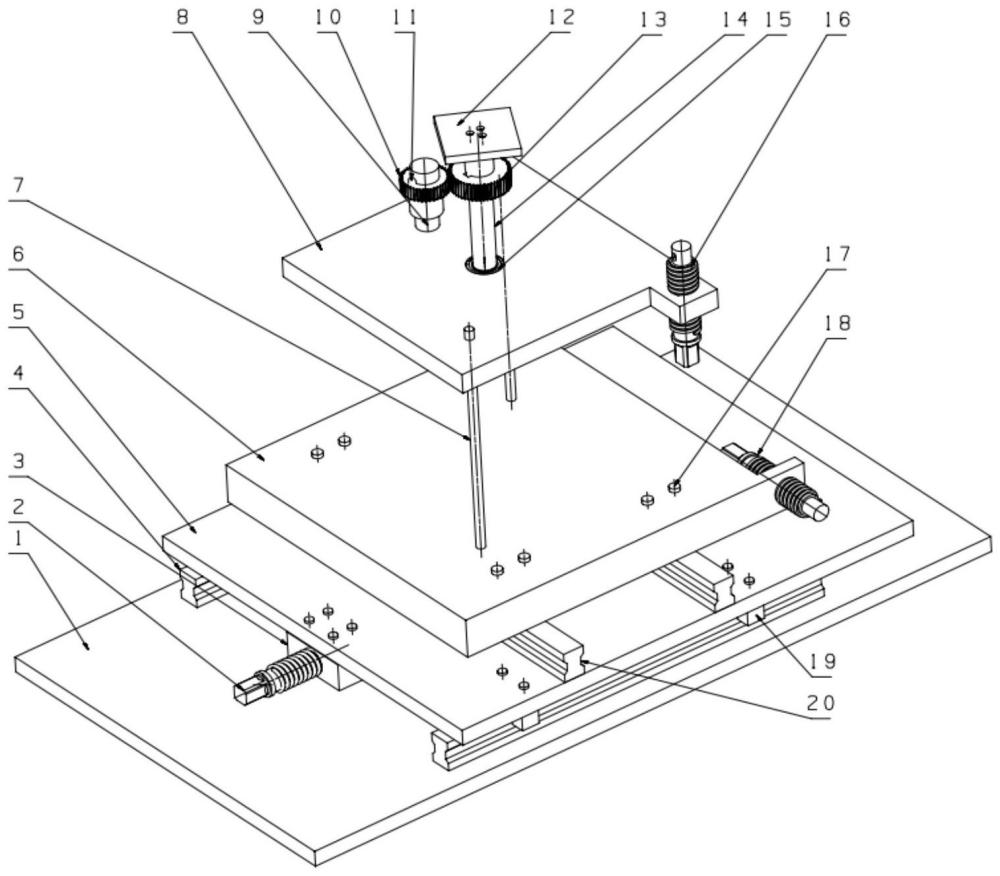
图1为本发明专利载物台的结构示意图。
图2为本发明专利载物台与控制系统的具体连接图。
图3为本发明专利载物台控制系统的原理框架图。
图中:1.底座,2.X轴滚珠丝杠,3.螺母,4.X轴导轨,5.X轴滑板,6.Y轴滑板,7.光轴,8.Z轴滑板,9.输入轴,10.小齿轮,11.键,12.测量载物台,13.大齿轮,14.输出轴,15.滚动轴承,16.Z轴滚珠丝杠,17.螺栓,18.Y轴滚珠丝杠,19.滑块,20.Y轴导轨,21.X轴伺服电机,22.Y轴伺服电机,23.Z轴伺服电机,24.旋转伺服电机,25.X轴伺服电机驱动器,26.Y轴伺服电机驱动器,27.Z轴伺服电机驱动器,28,旋转伺服电机驱动器,29.PLC控制器,30.人机界面。
具体实施方式
下面结合附图对本发明专利作进一步说明。
如图1和图2所示,该发明专利的新型载物台的主体结构包括:底座1、X轴滚珠丝杠2、螺母3、X轴导轨4、X轴滑板5、Y轴滑板6、光轴7、Z轴滑板8、输入轴9、小齿轮10、键11、测量载物台12、大齿轮13、输出轴14、滚动轴承15、Z轴滚珠丝杠16、螺栓17、Y轴滚珠丝杠18、滑块19、Y轴导轨20、X轴伺服电机21、Y轴伺服电机22、Z轴伺服电机23、旋转伺服电机24、X轴伺服电机驱动器25,Y轴伺服电机驱动器26,Z轴伺服电机驱动器27,旋转伺服电机驱动器28,PLC控制器29,人机界面30;所述底座1固定在光滑的水平面上,起到承载整个载物台的作用,并且在底座1之上安装X轴导轨4,用以实现X轴方向的平移;X轴滚珠丝杠2上的螺母3通过螺栓17固定在X轴滑板5上,螺母3将X轴滚珠丝杠2的旋转运动转化为X轴滑板5的水平直线移动,其中X轴滑板5通过滑块19与X轴导轨3连接,X轴导轨3对X轴滑板5的运动起到了导向作用,使X轴滑板5能够沿X轴方向水平移动,所述X轴滚珠丝杠2与X轴伺服电机21连接,用以实现X轴方向的驱动;所述X轴滑板5与其上的Y轴导轨20通过螺栓17固定连接,X轴滑板5对其上的载物台部件起到了承重作用;所述Y轴滚珠丝杠18与Y轴伺服电机22连接,并与Y轴滑板6相互连接,Y轴滑板6伸出的弯角内部刻有丝杠螺母色,其中Y轴滑板6与Y轴导轨20通过滑块连接,Y轴导轨20对Y轴滑板6的移动起到导向作用,Y轴伺服电机22转动可以拖动Y轴滑板6在Y轴方向上进行水平移动;所述光轴7(2根)底部与Y轴滑板6固定连接,光轴7(2根)穿过Z轴滑板8上的两个孔,Z轴滑板8可以沿着光轴7(2根)上下滑动,光轴7(2根)具有Z轴导向的作用,所述Z轴滚珠丝杠16与Z轴伺服电机23固定连接,Z轴伺服电机23转动带动滚珠丝杠16,滚珠丝杠16拖动Z轴滑板8沿着光轴7(2根)上下滑动,光轴7(2根)穿孔Z轴滑板8克服由Z轴伺服电机23带来的倾覆力矩;所述旋转伺服电机24通过联轴器与输入轴9相互连接,小齿轮10通过键11与输入轴9相互连接,小齿轮10与大齿轮13相互啮合,小齿轮10与大齿轮13共同配合实现降速功能,同时传递输出轴14旋转运动;所述滚动轴承15嵌套于输出轴14与Z轴滑板8之间,实现输出轴14与Z轴滑板8的连接,同时消除旋转伺服电机24给Z轴滑板8所带来的旋转运动;所述测量载物台12可以用于放置相关测量芯片。
如图1和图3所示,本发明专利的新型载物台的控制系统包括X轴伺服电机21、Y轴伺服电机22、Z轴伺服电机23、旋转伺服电机24、X轴伺服电机驱动器25,Y轴伺服电机驱动器26,Z轴伺服电机驱动器27,旋转伺服电机驱动器28,PLC控制器29,人机界面30。载物台控制系统的控制流程为:首先,相关工作人员在人机界面30上设置相关的移动速度、移动位置、旋转角度的参数,随后人机界面30将这些参数信号通过计算转化为脉冲设定信号,通过以太网发送给PLC控制器29,接着PLC控制器29将发送来的脉冲信号转换为低压控制信号发送给X轴伺服电机驱动器25、Y轴伺服电机驱动器26、Z轴伺服电机驱动器27和旋转伺服电机驱动器28,然后伺服电机驱动器根据所接收的控制信号控制相应伺X轴伺服电机21、Y轴伺服电机22、Z轴伺服电机23、旋转伺服电机24的旋转速度与旋转角度,进而实现对应伺服电机拖动相连的滚珠丝杠,滚珠丝杠拖动滑台进行X轴、Y轴、Z轴方向的运动以及Z轴的旋转运动。其中,伺服电机所内置的编码器可以采集相应的电脉冲信号作为位置反馈信号和速度反馈信号送回给伺服电机驱动器,然后伺服电机驱动器根据反馈回来的信号与事先设定的目标信号进行比较,进而伺服电机驱动器根据比较值发送相应的驱动信号调整伺服电机所在的位置和旋转速度,整个过程形成了一个闭环控制过程。
本专利中所描述的具体实例仅仅是对本发明作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改、补充或采用类似的方式替代,但并不会偏离本发明或者超越所附权利要求书所定义的范围。
- 一种显微扫描仪载物台
- 一种PCB板研发用多工位载物台
- 一种载物台及具有该载物台的搬运车
- 一种自稳定载物台控制方法、载物台及移动装置