一种钻/修井作业抽油管杆存储清洗维护系统
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及石油工业的机械化修井作业装置,具体地说是一种钻/修井作业抽油管杆存储清洗维护系统。
背景技术
抽油井修井作业是油田在开发生产过程中必不可少一项作业措施。目前,大多数油田使用传统的设备作业,需要二名工人负责抽油管杆的输送及排放,其工作环境恶劣,工人劳动强度大,并且操作过程中存在安全隐患。其次,油管在移运存储过程中存在原油滴落污染,传统工艺中防止污染的做法是将三防布铺在整个修井作业的地面收集油污,由于三防布造价高,且只能使用一次,造成高额费用。再次,在油管内部结蜡后,传统工艺需要专用设备对油管内壁进行清蜡处理,清蜡时露天敞开的结构极易对空气、土壤等造成污染,且效率低下。最后,部分油管在采油过程中会因偏磨、老化出现缝隙伤,造成原油漏失,一般做法是将整批油管移运至油管清理厂,清蜡后探伤,费用高,效率低,周期长。现场油管清洗流程长,需要排队等待清洗车服务。因此,有必要发明一种钻/修井作业抽油管杆存储清洗维护系统,为日常修井作业提供一个便捷高效的工作平台。
传统油井的修井作业的缺点如下:
1、人工摆放油管,占地面积大,劳动强度高,效率低下。
2、油管摆放搬运中污染土壤,无法清理,不符合绿色井场建设要求。
3、油管的清洗过程中没有围挡,废液四溅。
4、井场现场清洗效率低,需拍排队等待清洗车。
5、修井作业中的废油废水无法全面收集排出。
6、管杆数量、长度统计及补管自动化程度低,探伤为人工探伤。
7、现有作业方式需要大量人力资源,且涉及多行业工种协作,平均人力成本为采油行业之最。
发明内容
本发明为解决背景技术中存在的上述技术问题,而提供一种提高作业效率,降低修井成本且保护自然环境的钻/修井作业抽油管杆存储清洗维护系统。
本发明的技术解决方案是:本发明为一种钻/修井作业抽油管杆存储清洗维护系统,其特殊之处在于:该系统包括主体管箱、管杆输送系统、分层托架结构、管杆承接系统、自动清洗系统和管杆摆放系统;管杆输送系统后端悬挂在主体管箱前端,管杆承接系统设置在主体管箱内部,位置与管杆输送系统对应,管杆摆放系统和分层托架结构均设置在主体管箱内,自动清洗系统设置在主体管箱外,与分层托架结构位置对应。
优选的,管杆输送系统包括猫道框架,猫道框架后端悬挂在主体管箱前端,猫道框架上设置有将管杆输送到主体管箱的管杆输送装置,管杆输送装置为链条式管杆输送装置,设置在猫道框架上前后两端的第一输送链轮、第二输送链轮,在第一输送链轮和第二输送链轮上缠绕封闭的输送链条、横向双导轨、托运小车和驱动第一输送链轮的输送传动装置,横向双导轨设置在猫道框架上,托运小车设置在横向双导轨上,并与输送链条连接,横向双导轨一侧的猫道框架上设置有电液推缸,电液推缸为两个,设置在猫道框架同侧两端,管杆输送系统还包括支撑架,支撑架设置在猫道框架底部。
优选的,管杆承接系统包括支架、托辊、驱动托辊的承接传动装置和检测开关,支架固定在主体管箱侧面,与管杆输送系统位置对应,承接传动装置和托辊架设在支架上,检测开关设置在支架前端,托辊和承接传动装置为多个,多个托辊成一条直线设置在支架上。
优选的,管杆摆放系统包括设置在主体管箱的管杆摆放单元,管杆摆放单元包括两个竖向导轨和一个横向导轨,横向导轨设置在竖向导轨之间,每一竖向导轨上均设置有第一竖向链轮、第二竖向链轮、在第一竖向链轮和第二竖向链轮上缠绕封闭的竖向链条以及驱动第一竖向链轮的第一竖向传动装置,第一竖向链轮、第二竖向链轮分别设置在竖向导轨的上下两端,横向导轨上设置有第一横向链轮、第二横向链轮、在第一横向链轮和第二横向链轮上缠绕封闭的横向链条、驱动第一横向链轮的第一横向传动装置以及设置在横向链条上的挂钩总成,第一横向链轮、第二横向链轮分别设置在横向导轨的左右两端,横向导轨的两端分别与两个竖向导轨的竖向链条连接,管杆摆放系统还包括设置在横向导轨两端,对横向导轨上下移动导向的导向轮,管杆摆放单元为两个,平行对称设置在主体管箱内,分层托架包括分层托架单元,分层托架单元包括立柱和限位悬臂梁,立柱竖直设置在主体管箱侧面,立柱内侧横向设置限位悬臂梁,限位悬臂梁一端与立柱连接,另一端为自由端,限位悬臂梁为多个,横向平行设置在立柱上,限位悬臂梁之间的立柱上设置有定位块,限位悬臂梁上设置有卡齿,限位悬臂梁为油管限位悬臂梁、油杆限位悬臂梁和或平面悬臂梁,分层托架单元为多个,平行设置在主体管箱内,分层托架单元相对设置时,分层托架单元之间间隔设置。
优选的,自动清洗系统设置在管杆输送系统下方,包括第一清洗链轮、第二清洗链轮、在第一清洗链轮和第二清洗链轮上缠绕封闭的清洗链条、驱动第一清洗链轮的清洗传动装置,第一清洗链轮、第二清洗链轮设置在管杆输送系统底部前后两端,内探清洗管设置在清洗链条上,第一清洗链轮上方设置有清洗管托辊,自动清洗系统还设置有防外喷板,防外喷板设置在对应自动清洗系统的主体管箱上,防外喷板上设置有可让内探清洗管穿过的孔,内探清洗管远离主体管箱的一端通过高压出水管与清洗泵连接。
优选的,清洗维护系统还包括自动排污系统,自动排污系统设置主体管箱底部,自动排污系统设置在主体管箱底部前端,包括吸污管,排污管和渣油泵,渣油泵栓结在吸污管上方,排污管和渣油泵连接,吸污管进水端安装有过滤网,自动排污系统还包括闸阀,闸阀设置在吸污管末端,靠近吸污管的位置设置有液位检测装置。
优选的,清洗维护系统还包括探伤系统,探伤系统固定在主体管箱前端,位于管杆输送系统上方。
优选的,清洗维护系统还包括管杆长度测量系统,管杆长度测量系统设置在管杆输送系统上方。
优选的,清洗维护系统还包括控制系统,控制系统固定在主体管箱一端,控制立体仓储管箱的智能运行,控制系统包括井口防爆操作箱,户外控制柜和检测开关,井口防爆操作箱和检测开关分别与户外控制柜连接,户外控制柜包括主电源配电、输送传动控制系统、管杆承接控制系统、自动清洗控制系统、管杆摆放控制系统、自动排污控制系统、自动探伤控制系统、管杆长度测量系统、逻辑控制系统及人机界面HMI,人机界面HMI安装在户外控制柜门上,主电源配电完成380VAC的电源通断功能,逻辑控制系统分别与输送传动控制系统、管杆承接控制系统、自动清洗控制系统、管杆摆放控制系统、自动排污控制系统、自动探伤控制系统和管杆长度测量系统连接。
优选的,主体管箱为型钢焊接而成,顶部铺设钢格栅,前端为开放式,剩余面覆盖钢板。
本发明具有以下优点:
1、本发明实现机电液一体化生产,实现修井过程抽油杆和抽油管的自动排放、清洗、检查和分拣,降低劳动强度,提高作业效率,降低修井成本,保护自然环境;
2、本发明有自动检测及监控系统,可实现修井作业过程的抽油管及抽油杆的自动存取,运行状态及数据的监控、数据存储及分析;
3、本发明结构简单,移运方便,安装快速,占地面积小,适用于各种井场布置;
4、本发明自有自动清洗系统,无需外加井场清洗车;
5、本发明设计自动油水收集、井液回灌系统,保证油污不飞溅、不落地,符合国家及国际环保要求;
6、本发明设计自动计数和探伤功能,自动化完成油管、油杆计数、探伤,代替人工计数,节省人力、降低工作强度;
7、本发明设计有管杆自动摆放就位功能,实现管杆的自动定位、移运、存储,运行过程自动化程度高、精确定位、智能排管。
附图说明
图1为本发明的总体结构示意图;
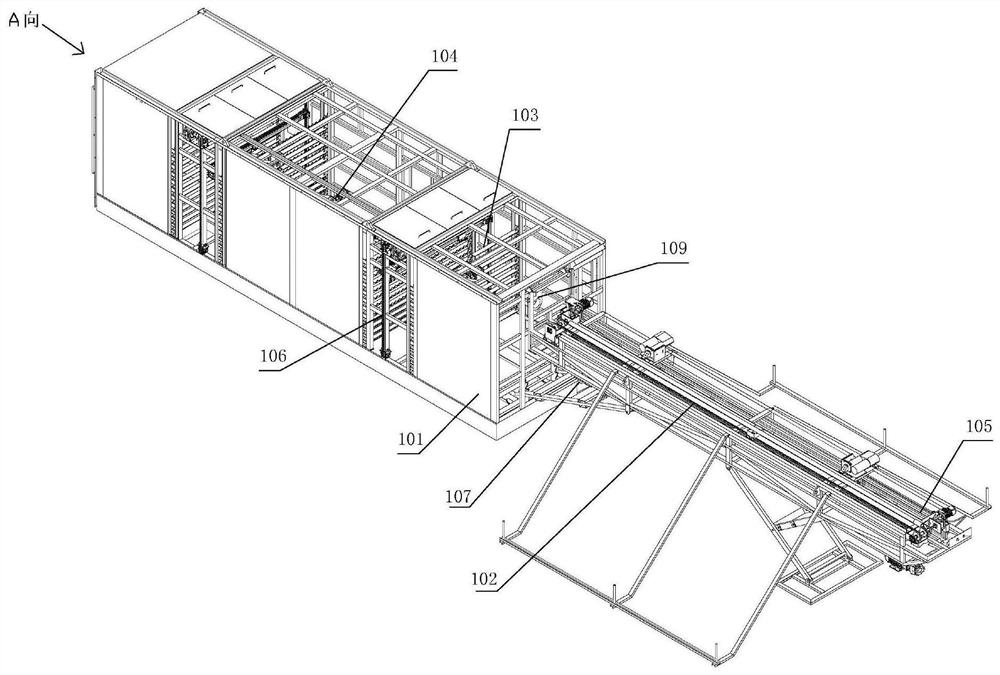
图2为图1的A向示意图;
图3为本发明管杆输送系统的结构示意图;
图4为图3的A部放大示意图;
图5为图3的B部放大示意图;
图6为图3的C部放大示意图;
图7本发明分层托架结构的结构示意图;
图8为图7的A部放大示意图;
图9为图7的B部放大示意图;
图10为图7的C部放大示意图;
图11为本发明管杆承接系统的结构示意图;
图12为图11的A部放大示意图;
图13为本发明自动清洗系统的结构示意图;
图14为图13的A部放大示意图;
图15为图13的B部放大示意图;
图16为本发明管杆摆放系统的结构示意图;
图17为图16的A部放大示意图;
图18为图16的B部放大示意图;
图19为图16的C部放大示意图;
图20为本发明自动排污系统的结构示意图;
图21为图20的A部放大示意图;
图22为本发明控制系统的框图;
图23为本发明控制系统的控制原理示意图。
附图标记说明如下:
101、主体管箱;102、管杆输送系统;103、分层托架结构;104、管杆承接系统;105、自动清洗系统;106、管杆摆放系统;107、自动排污系统;108、控制系统;109探伤系统;
201、猫道框架;202、输送转动装置;203、第一输送链轮;204、输送链条;205、第二输送链轮;206、托运小车;207、横向双导轨;208、支撑架;209、电液推缸;
301、油管限位悬臂梁;302、油杆限位悬臂梁;303、平面悬臂梁;304、立柱;305、油管定位块;306、油杆定位块;
401、支架;402、承接传动装置;403、托辊;
501、清洗泵;502、高压出水管;503、内探清洗管;504、清洗传动装置;505、清洗管托辊;506、第二清洗链轮;507、链条;508、防外喷板;509、油管;510、第一清洗链轮;
601、竖向传动装置;602、竖向导轨;603、第一竖向链轮;604、竖向链条;605、第二竖向链轮;606、横向导轨;607、挂钩总成;608、导向轮;609、横向传动装置;610、第一横向链轮;611、第二横向链轮;612、横向链条;
701、吸污管;702、手动球阀;703、过滤网;704、渣油泵;705、排污管;706、液位检测装置。
具体实施方式
有关本发明的详细说明及技术内容,配合附图说明如下,然而附图仅提供参考与说明之用,并非用来对本发明加以限制。
下面我们结合图1、2,对本发明的总体方案具体说明:
参见图1、2,本发明包括主体管箱101、管杆输送系统102、分层托架结构103、管杆承接系统104、自动清洗系统105、管杆摆放系统106、自动排污系统107、控制系统108、探伤系统109以及管杆长度测量系统。
主体管箱101为型钢焊接而成,顶部铺设钢格栅,前端为开放式,剩余面覆盖钢板,底座分为若干腔体,每一部分底腔结构由型材和钢板制成,利用连通器原理将每一个底座腔体连接成一个具备更大油污存储腔体,主体管箱101上有吊装功能、废液收容功能;管杆输送系统102后端悬挂在主体管箱101前端,管杆输送系统102前端放在靠近井口处,通过管杆输送系统102承接由上一个流程送来的管杆,并将管杆送入主体管箱101后由管杆承接系统104来承接,管杆摆放系统106牢固的固定在主体管箱101的基座上,管杆摆放系统106主要移运经管杆承接系统104运送来的管杆,并将管杆摆放到分层托架结构103预先指定的清洗位置,自动清洗系统105会清洗油管内部,清洗完毕后,管杆摆放系统106会将油管或油杆(油杆不清洗)依次摆放到固定在主体管箱101内的分层托架系统102上,油管排放在主体管箱101内的清洗废液会由自动排污系统107排出,当所有油管都清洗完毕收纳入主体管箱101中时,管杆摆放系统104依次将管杆摆放在管杆承接系统104上,由管杆承接系统104移出主体管箱101,回到管杆输送系统102,清洗后的管杆返回井口处,控制系统108固定在主体管箱101一端,控制立体仓储管箱的智能运行,探伤系统109固定在箱体前端,负责对油管或油杆进行探伤,探伤系统109可采用现有的探伤设备,如涡流漏磁探伤,超声波探伤、射线探伤或磁力探伤设备。管杆长度测量系统由两个位置传感器组成,一个位置传感器设置在管杆输送系统中部,另一个传感器设置在管杆输送系统一端。通过两个位置传感器分别记录管杆输送系统上的正在输送的同一管杆的位置和距离,得到该管杆的长度。
下面我们结合图3、4、5、6,对本发明的管杆输送系统102具体说明:
参见图3、4、5、6,管杆输送系统102后端悬挂在主体管箱101前端,管杆输送系统102前端放在靠近井口处,管杆输送系统102包括猫道框架201,猫道框架201后端悬挂在主体管箱101前端,猫道框架201上设置有将管杆输送到主体管箱101的管杆输送装置。在本实施例中,管杆输送装置为链条式管杆输送装置,其包括第一输送链轮203、第二输送链轮205、在第一输送链轮203和第二输送链轮205上缠绕封闭的输送链条204、横向双导轨207、托运小车206和驱动第一输送链轮203的输送传动装置202,在猫道框架201前后分别架设第一输送链轮203、第二输送链轮205,横向双导轨207设置在猫道框架201上,托运小车206设置在横向双导轨207上,并与输送链条204连接。横向双导轨207一侧的猫道框架201上还设置有电液推缸209,在本实施例中,电液推缸209为两个,设置在猫道框架201同侧两端。管杆输送系统102还包括支撑架208,支撑架208设置在猫道框架201底部。
在工作时输送传动装置202驱动第一输送链轮203带动输送链条204拖动托运小车206在横向双导轨207上运行,拖动托运小车206将上一道工序送来的油管或油杆在运送过程中由90°放置为水平状态运送到主体管箱101内,由管杆承接系统104传递承接。当油管或油杆清洗完运出主体管箱101时,经探伤系统109探伤后,不合格的油管或油杆运送至猫道框架201时,会被电液推缸209推出猫道进行检修,支撑架208起到支撑猫道框架201的作用。
下面我们结合图7、8、9、10,对发明的分层托架结构103具体说明:
参见图7、8、9、10,分层托架结构103主要作用是分层摆放管杆,此结构架设在主体管箱101内部,分层托架103包括分层托架单元,分层托架单元包括立柱304和限位悬臂梁,立柱304竖直设置在主体管箱101底座侧面,立柱304内侧横向设置限位悬臂梁,限位悬臂梁一端与立柱连接,另一端为自由端。限位悬臂梁为多个,横向平行设置在立柱304上,限位悬臂梁为油管限位悬臂梁301、油杆限位悬臂梁302和或平面悬臂梁303。分层托架单元为多个,平行设置在主体管箱内。分层托架单元相对设置时,分层托架单元之间间隔设置。
立柱304分别垂直固定在主体管箱1底座,油管限位悬臂梁301、油杆限位悬臂梁302、平面悬臂梁303间隔一定距离分别垂直焊接在两根立柱304之间,油管限位悬臂梁301之间的立柱304上设置有油管定位块305,油杆限位悬臂梁302之间的立柱304上设置有油杆定位块306,油管定位块305、油杆定位块306起到加强和定位作用,油管限位悬臂梁301、油杆限位悬臂梁302和平面悬臂梁303配合用于实现分层摆放管杆的作用,油管限位悬臂梁301、油杆限位悬臂梁302上的卡齿用于油管或油杆存储的限位。
在本实施例中,分层托架单元为八个,相对的两个分层托架单元的自由端间隔设置,4组相对的两个分层托架单元成平行设置。中间的四个分层托架单元的立柱304上部的限位悬臂梁为油管限位悬臂梁301,下部的限位悬臂梁为油杆限位悬臂梁302,外侧的四个分层托架单元的限位悬臂梁均为平面悬臂梁303,起支撑油管和油杆的作用。
下面我们结合图11、12,对管杆承接系统104具体说明:
参见图11、12,管杆承接系统104用来承接运输上道工序送来的管杆,此结构架设在主体管箱101内部,包括支架401、托辊403、驱动托辊403的承接传动装置402和检测开关404,支架401固定在主体管箱侧面结构件上,与管杆输送系统102位置对应,承接传动装置402和托辊403架设在支架401上。托辊403和承接传动装置402为多个,多个托辊403成一条直线设置在支架401上,检测开关404设置在支架401前端。在本实施例中,托辊403为5个。
工作时,承接传动装置402驱动托辊403拖动油管或油杆向主体管箱101后端运行直到离开检测开关404后,控制系统判定管杆运送到位。
下面我们结合图13、14、15,对发明的自动清洗系统105具体说明
自动清洗系统105是一种可调压力的油管清洗装置,架设在猫道框架201下方,包括第一清洗链轮510、第二清洗链轮506、在第一清洗链轮510和第二清洗链轮506上缠绕封闭的清洗链条507、驱动第一清洗链轮510的清洗传动装置504,第一清洗链轮510、第二清洗链轮506设置在猫道框架201底部前后两端,内探清洗管503设置在清洗链条507上。第一清洗链轮510上方还设置有清洗管托辊505。自动清洗系统还设置有防止清洗的高压水向外溅射的防外喷板508,防外喷板508设置在对应自动清洗系统105的主体管箱101上,防外喷板508上设置有可让内探清洗管503穿过的孔。内探清洗管503远离主体管箱101的一端通过高压出水管502与清洗泵501连接。
在工作时,传清洗动装置504经第一清洗链轮510和第二清洗链轮506带动清洗链条507拖动内探清洗管503在清洗管托辊505上水平往复运动,经过防外喷板508将高压出水管502送入油管内,进行清洗作业,清洗泵501提供作业压力。
下面我们结合图16、17、18对本发明的管杆摆放系统106具体说明:
参见图16、17、18、19,管杆摆放系统106是一套油管、油杆两用的移运系统,此系统架设在主体管箱101内部,管杆摆放系统106包括设置在主体管箱的管杆摆放单元,管杆摆放单元包括两个竖向导轨602和一个横向导轨606,横向导轨606设置在竖向导轨602之间,每一竖向导轨602上均设置有第一竖向链轮603、第二竖向链轮605、在第一竖向链轮603和第二竖向链轮605上缠绕封闭的竖向链条604以及驱动第一竖向链轮603的竖向传动装置601,第一竖向链轮603、第二竖向链轮605分别设置在竖向导轨602的上下两端,横向导轨606上设置有第一横向链轮610、第二横向链轮611、在第一横向链轮610和第二横向链轮611上缠绕封闭的横向链条612、驱动第一横向链轮610的横向传动装置609以及设置在横向链条612上的挂钩总成607,横向链条612绕经第一横向链轮610、第二横向链轮611后分别固定栓结在挂钩总成607的左右端面。第一横向链轮610、第二横向链轮611分别设置在横向导轨606的左右两端,横向导轨606的两端分别与两个竖向导轨602的竖向链条连接605。管杆摆放系统106还包括设置在横向导轨606两端,对横向导轨606上下移动导向的导向轮608。在本实施例中,管杆摆放单元为两个,平行对称设置在主体管箱101内。
工作时,四条竖向导轨602中的竖向传动装置601带动第一竖向链轮603转动,通过竖向链条604拖动两条横向导轨606经由导向轮608上下运动,两条横向导轨606中的横向传动装置609带动第一横向链轮610转动,通过横向链条612拖动挂钩总成607左右运动,勾起摆放在管杆承接系统104的托辊403上的油管或油杆运送到分层托架结构103上摆放,清洗完成后,再由管杆摆放系统106将清洗后的油管或油杆从分层托架结构103上,依次摆放回管杆承接系统104的托辊403,再通过管杆输送系统102送回井口。
下面我们结合图20、21,对本发明的自动排污系统107具体说明:
参见图20、21,自动排污系统107包括焊接在主体管箱101前端的吸污管701,手动球阀702和液位检测装置706安装在底腔内靠近吸污管701的位置,用于控制自动排污,吸污管701进水端安装有可拆卸的过滤网703,渣油泵704栓结在吸污管701上方,排污管705和渣油泵704连接,手动球阀702安装在吸污管701在腔体外末端。
工作时,控制系统109控制渣油泵704自动开启,通过底腔外排污装置的渣油泵704产生强大的负压吸引力,经吸污管701将经可拆卸的过滤网703初步过滤的污物吸入,由底腔外排污装置将污物经排污管705排出至井口回收,实现了箱体底腔污物和清洗废水的自动排放。
下面我们结合图22、23,对本发明的控制系统108具体说明:
参见图22,控制系统108包含井口防爆操作箱、户外控制柜和检测开关,经由电缆和接插件将井口防爆箱、检测开关和户外控制柜连接,如图22所示,井口防爆箱为可移动设备,放置在井口操作平台上,主要完成设备自动运行的操作。户外控制柜固定在主体管箱101的一端。人机界面HMI安装在户外控制柜门上。户外控制柜包括主电源配电、输送传动控制系统、管杆承接控制系统、自动清洗控制系统、管杆摆放控制系统、自动排污控制系统、自动探伤控制系统、管杆长度测量系统、逻辑控制系统及人机界面HMI,逻辑控制系统分别与输送传动控制系统、管杆承接控制系统、自动清洗控制系统、管杆摆放控制系统、自动排污控制系统、自动探伤控制系统和管杆长度测量系统连接。主电源配电主要完成380VAC的电源通断功能,通过电气元件对电源进行短路过载保护。
参见图23,操作人员通过井口防爆操作箱对设备进行操作,操作命令通过电缆及接插件连接进入控制器中,系统通过控制器对系统进行速度、位置、方向的控制,控制器通过通讯对各系统的传动装置发出速度、位置控制的命令,传动装置通过控制电机完成速度、位置的控制。每一电机均配备高精度速度传感器,采集电机的实时转速,反馈到传动装置及控制器中,形成闭环控制。在设备运行的轨迹中设置上限位,下限位对设备进行保护,并通过零位开关防止积累误差的产生。可通过人机界面HMI对设备进行状态监控。控制系统的特点是自动化程度高、一键运行、精准定位、智能排管。
本发明内容及上述实施例中未具体叙述的技术内容同现有技术。
以上,仅为本发明公开的具体实施方式,但本发明公开的保护范围并不局限于此,本发明公开的保护范围应以权利要求的保护范围为准。
- 一种钻/修井作业抽油管杆存储清洗维护系统
- 一种钻/修井作业抽油管杆存储清洗维护系统