转向装置
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及转向装置。
背景技术
在专利文献1中公开有一种具有基于转向反力用电机角传感器及齿条轴力传感器的各传感器信号控制转向反力用促动器及转舵用催动器的动作的转向反力用控制器及转舵装置用控制器的转向装置。
现有技术文献
专利文献
专利文献1:(日本)特开2005-335587号公报
发明内容
发明所要解决的课题
在上述现有技术中,转向反力用电机角传感器及齿条轴力传感器与转向反力用控制器连接。转舵装置用控制器经由双向通信线从转向反力用控制器接收各传感器信号。在上述现有技术中,转向反力用控制器发生故障时,由于转舵装置用控制器无法取得各传感器信号,故而存在不能继续转向控制的问题。
用于解决课题的手段
本发明的目的之一是提供一种转向装置,即使在转向机构控制装置经由转向输入机构控制装置不能取得转向输入机构的信息的情况下,也能够继续基于转向机构控制装置的转向控制。
本发明一方面的转向装置具有第一通信回路和第二通信回路,所述第一通信回路设置在转向输入机构与转向机构控制装置之间,将从第一转向操作量信号输出部输出的第一转向操作量信号向转向机构控制装置输出,所述第二通信回路设置在转向输入机构与转向机构控制装置之间,不经由输入机构第二微处理处理器,将第二转向操作量信号向转向机构控制装置输出。
因此,在本发明的一方面中,即使在转向机构控制装置经由转向输入机构控制装置不能取得转向输入机构的信息的情况下,也能够继续进行转向机构控制装置的转向控制。
附图说明
图1是实施方式1的转向装置1的构成图;
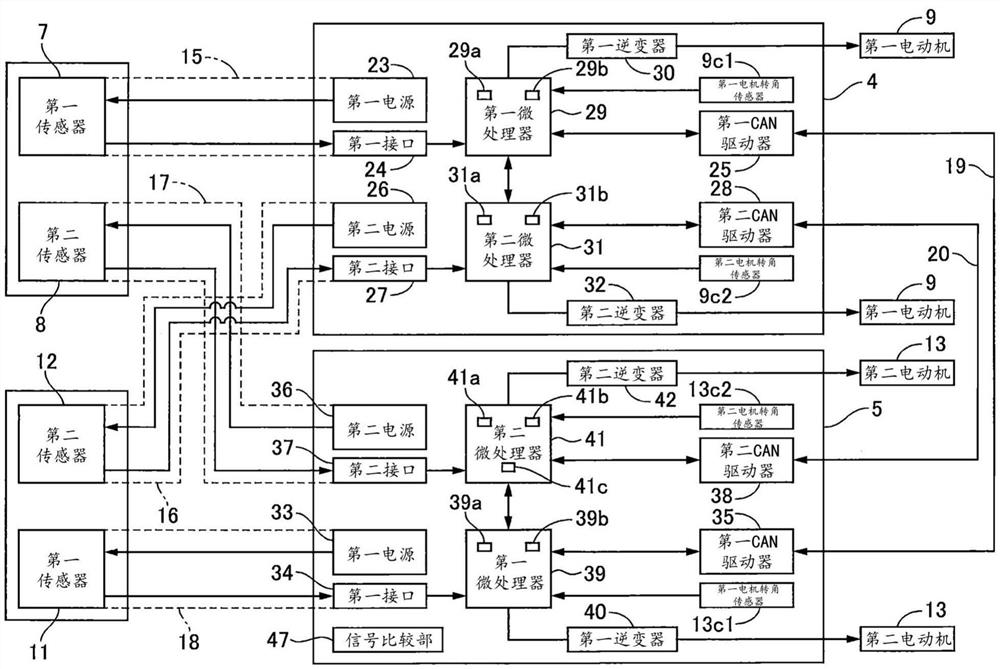
图2是实施方式1的转向装置1的电路框图;
图3是实施方式2的转向装置1A的电路框图。
具体实施方式
〔实施方式1〕
图1是实施方式1的转向装置1的构成图。
转向装置1是将方向盘(转向操作输入部件)6和对前轮(转向轮)14进行转向的转向机构3机械地分离的所谓的转向线方式的转向装置。转向装置1具有转向输入机构2、转向机构3、转向输入机构控制装置4以及转向机构控制装置5。
转向输入机构2具有方向盘6、第一舵角传感器(第一转向操作量传感器)7、第二舵角传感器(第二转向操作量传感器)8以及第一电动机9。方向盘6根据驾驶员的转向操作而旋转。第一舵角传感器7检测方向盘6的旋转量,输出与检测出的旋转量对应的第一转向操作量信号。第二舵角传感器8检测方向盘6的旋转量,输出与检测出的旋转量对应的第二转向操作量信号。第一转向操作量信号和第二转向操作量信号是与方向盘6的旋转量对应的模拟信号、或基于SENT(Single Edge Nibble Transmission)基础的SPC(Short PWM Code)协议编码到SENT消息中的数字信号。第一电动机9是相对于方向盘6产生使转向负荷相对于驾驶员的转向操作增大的力(转向反力)的反力促动器。第一电动机9具有第一转子9a、第一定子9b以及第一电机旋转角传感器9c。第一电机旋转角传感器9c检测第一转子9a的旋转位置,输出与检测出的旋转位置对应的第一电机旋转角信号。另外,第一电机旋转角传感器9c具有两个电机旋转角传感器9c1、9c2(参照图2)。
转向机构3具有齿条(转向部件)10、第一齿条位置传感器(第一转向量传感器)11、第二齿条位置传感器(第二转向量传感器)12以及第二电动机13。齿条10能够在车宽方向上移动,根据移动量对前轮14进行转向。第一齿条位置传感器11检测齿条10的位置,输出对应于检测到的位置的第一转向量信号。前轮14的转向角根据齿条10的位置唯一决定,所以第一转向量信号是与前轮14的转向角相关的信号。第二齿条位置传感器12检测齿条10的位置,输出对应于检测到的位置的第二转向量信号。第一转向量信号和第二转向量信号是基于对应于齿条10的位置的模拟信号或、SENT(Single Edge Nibble Transmission单边半字节传输)基础的SPC(Short PWM Code短脉宽调制码)规约而编码到SENT信息中的数字信号。第二电动机13是基于来自转向机构控制装置5的转向促动器驱动信号,产生经由齿条10对前轮14进行转向的力的转向促动器。第二电动机13具有第二转子13a、第二定子13b以及第二电机旋转角传感器13c。第二电机旋转角传感器13c检测第二转子13a的旋转位置,输出与检测出的旋转位置对应的第二电机旋转角信号。另外,第二电机旋转角传感器13c具有两个电机旋转角传感器13c1、13c2(参照图2)。
转向输入机构控制装置4和第一舵角传感器7通过通信线15直接连接。另外,转向输入机构控制装置4和第二齿条位置传感器12通过通信线16直接连接。转向输入机构控制装置4基于第一转向操作量信号或第二转向操作量信号、以及第一转向量信号或第二转向量信号来驱动控制第一电动机9。转向输入机构控制装置4经由设置在转向输入机构2和转向机构控制装置5之间的第一CAN通信线(第一通信回路)19从转向机构控制装置5接收第一转向量信号。另外,转向输入机构控制装置4经由设置在转向输入机构2和转向机构控制装置5之间的第二CAN通信线(第三通信回路)20接收第二转向操作量信号。另外,转向输入机构控制装置4在第一舵角传感器7和第二舵角传感器8发生故障时,基于第一电机旋转角信号生成与方向盘6的旋转量相关的信号,基于生成的信号对第一电动机9进行驱动控制。
转向机构控制装置5和第二舵角传感器8通过通信线(第二通信回路)17直接连接。另外,转向机构控制装置5和第一齿条位置传感器11通过通信线18直接连接。转向机构控制装置5基于第一转向操作量信号或第二转向操作量信号、以及第一转向量信号或第二转向量信号来驱动控制第二电动机13。转向机构控制装置5经由第一CAN通信线19从转向输入机构控制装置4接收第一转向操作量信号。另外,转向机构控制装置5经由第二CAN通信线20从转向输入机构控制装置4接收第二转向量信号。另外,转向机构控制装置5在第一齿条位置传感器11及第二齿条位置传感器12发生故障时,基于第二电机旋转角信号生成与前轮14的转向角相关的信号,并基于生成的信号驱动控制第二电动机13。
转向输入机构控制装置4和转向机构控制装置5从第一电池21和第二电池22接收电力供给。第一电动机9、第一舵角传感器7以及第二齿条位置传感器12从转向输入机构控制装置4接受电力的供给。第二电动机13、第二舵角传感器8以及第一齿条位置传感器11从转向机构控制装置5接受电力的供给。
转向输入机构控制装置4在转向机构控制装置5发生故障时,基于第一转向操作量信号、第二转向量信号、车速等对第二电动机13进行驱动控制。另外,转向机构控制装置5在转向输入机构控制装置4发生故障时,基于第二转向操作量信号、第一转向量信号、车速等对第一电动机9进行驱动控制。
图2是实施方式1的转向装置1的电路框图。
首先,说明转向输入机构控制装置4的构成。
第一电源23作为第一舵角传感器7的电源进行供给。第一电源23与第一电池21连接。第一接口24对从第一舵角传感器7接收到的第一转向操作量信号进行解码。第一CAN驱动器25经由第一CAN通信线19与转向机构控制装置5的第一CAN驱动器35进行CAN通信。第二电源26作为第二齿条位置传感器12的电源并进行供给。第二电源26与第二电池22连接。第二接口27对从第二齿条位置传感器12接收到的第二转向量信号进行解码。第二CAN驱动器28经由第二CAN通信线20与转向机构控制装置5的第二CAN驱动器38进行CAN通信。
第一微处理器(输入机构第一微处理器)29具有第一反力促动器控制部29a和第一转向操作量信号输出部29b。第一反力促动器控制部29a从第一接口24输入第一转向操作量信号,从第一CAN驱动器25输入第一转向量信号,输出驱动控制第一电动机9的第一反力促动器驱动信号。另外,第一反力促动器控制部29a向第一舵角传感器7输出指示开始输出第一转向操作量信号的第一转向操作量信号输出指示信号。第一舵角传感器7在接收到第一转向操作量信号输出指示信号时,输出第一转向操作量信号。第一转向操作量信号输出部29b向第一CAN驱动器25输出第一转向操作量信号。第一逆变器30基于第一反力促动器驱动信号将来自第一电池21的直流功率转换为交流功率并向第一电动机9供给。
第二微处理器(输入机构第二微处理器)31具有第二反力促动器控制部31a和第二转向操作量信号输出部31b。第二反力促动器控制部31a从第二接口27输入第二转向量信号,从第二CAN驱动器28输入第二转向操作量信号,输出驱动控制第一电动机9的第二反力促动器驱动信号。另外,第二反力促动器控制部31a向第二齿条位置传感器12输出指示开始输出第二转向量信号的第二转向量信号输出指示信号。第二齿条位置传感器12在接收到第二转向量信号输出指示信号时,输出第二转向量信号。第二逆变器32基于第二反力促动器驱动信号,将来自第二电池22的直流电转换为交流电并向第一电动机9供给。
接着,说明转向机构控制装置5的结构。
第一电源33作为第一齿条位置传感器11的电源并进行供给。第一电源33与第一电池21连接。第一接口34对从第一齿条位置传感器11接收到的第一转向量信号进行解码。第一CAN驱动器35经由转向输入机构控制装置4的第一CAN驱动器25和第一CAN通信线19进行CAN通信。第二电源36制成第二舵角传感器8的电源并进行供给。第二电源36与第二电池22连接。第二接口37对从第二舵角传感器8接收到的第二转向操作量信号进行解码。第二CAN驱动器38经由第二CAN通信线20与转向输入机构控制装置4的第二CAN驱动器28进行CAN通信。
第一微处理器(转向机构第一微处理器)39具有第一转向促动器控制部39a和第一转向量信号输出部39b。第一转向促动器控制部39a从第一接口34输入第一转向量信号,从第一CAN驱动器35输入第一转向操作量信号,输出驱动控制第二电动机13的第一转向促动器驱动信号。另外,第一转向促动器控制部39a向第一齿条位置传感器11输出指示开始第一转向量信号的输出的第一转向量信号输出指示信号。第一齿条位置传感器11在接收到第一转向量信号输出指示信号时,输出第一转向量信号。第一转向量信号输出部39b向第一CAN驱动器35输出第一转向量信号。第一逆变器40基于第一转向促动器驱动信号将来自第一电池21的直流电转换为交流电,并向第二电动机13供给。
第二微处理器(转向机构第二微处理器)41具有第二转向促动器控制部41a、第二转向量信号输出部41b。第二转向促动器控制部41a从第二接口37输入第二转向操作量信号,从第二CAN驱动器38输入第二转向量信号,输出驱动控制第二电动机13的第二转向促动器驱动信号。另外,第二转向促动器控制部41a向第二转向角传感器8输出指示开始第二转向操作量信号的输出的第二转向操作量信号输出指示信号。第二舵角传感器8在接收到第二转向操作量信号输出指示信号时,输出第二转向操作量信号。第二逆变器42基于第二转向促动器驱动信号将来自第二电池22的直流电转换为交流电并向第二电动机13供给。
转向机构控制装置5具有信号比较部47。信号比较部47通过对经由第一CAN通信线19从转向输入机构2向转向机构控制装置5发送的第一转向操作量信号和经由通信线17从转向输入机构2向转向机构控制装置5发送的第二转向操作量信号进行比较,判断第一转向操作量信号或第二转向操作量信号有无异常。
实施方式1的转向输入机构控制装置4具有2个微处理器29,31。因此,即使在第一微处理器29发生故障的情况下,也能够通过第二微处理器31驱动控制第一电动机9,能够继续进行反力控制。另外,转向机构控制装置5具有两个微处理器39,41。因此,即使在第一微处理器39发生故障的情况下,也能够通过第二微处理器41驱动第二电动机13,能够继续进行转向控制。
接着,说明实施方式1的作用效果。
线控转向方式的转向装置具备驱动控制对转向轮转向的转向促动器的转向控制器和驱动控制对方向盘赋予转向反力的反力促动器的反力控制器。在以往的转向装置中,通过双向通信线将转向控制器和反力控制器之间连接,进行信息交换。因此,在上述现有技术中,在双向通信线发生断线等故障的情况下,转向控制器不能取得方向盘的角度,不能继续进行转向控制。因此,需要将方向盘和转向机构机械连接的轴和离合器等备份机构,存在导致成本上升的问题。
与此相对,实施方式1的转向装置1设置在转向输入机构2与转向机构控制装置5之间,具有将从第一转向操作量信号输出部29b输出的第一转向操作量信号向转向机构控制装置5输出的第一CAN通信线19和通信线17,该通信线17设置在转向输入机构2与转向机构控制装置5之间,不经由第一微处理器29将第二转向操作量信号向转向机构控制装置5输出。例如,在第一CAN通信线19发生了异常的情况下,或者转向输入机构控制装置4的电源电路发生了异常的情况下,不能将第一转向操作量信号发送给转向机构控制装置5。此时,实施方式1的转向装置1具有能够不经由第一微处理器29而将第二转向操作量信号发送到转向机构控制装置5的通信线17,因此,即使转向机构控制装置5不能经由第一CAN通信线19接收第一转向操作量信号的情况下,转向机构控制装置5也能够接收第二转向操作量信号,基于第二转向操作量信号继续进行转向控制。其结果,不需要机械地连接方向盘6和转向机构3的备用机构,能够抑制成本的上升。
转向装置1设置在转向输入机构2与转向机构控制装置5之间,具有第二CAN通信线20,该第二CAN通信线20将从第二微处理器31的第二转向操作量信号部31b输出的第二转向操作量信号向转向机构控制装置5输出。由此,即使在第一CAN通信线19发生故障的情况下,转向机构控制装置5也能够经由第二CAN通信线20接收第二转向量信号。因此,即使在第一微处理器39不能接收第一转向量信号的情况下,也能够基于第二转向量信号继续进行转向控制。
第一舵角传感器7和第二舵角传感器8检测方向盘6的旋转量。因此,即使在转向输入机构控制装置4发生了故障的情况下,转向机构控制装置5也能够经由通信线17取得第二转向量信号,因此能够进行对应于方向盘6的旋转量的转向控制、即对应于驾驶员的转向意图的转向控制。
第一电动机9包括第一转子9a、第一定子9b、第一电机旋转角传感器9c,第一电机旋转角传感器9c能够检测第一转子9a的旋转位置,转向输入机构控制装置4基于第一电机旋转角传感器9c的输出信号,生成与方向盘6的旋转量相关的信号。由此,在第一舵角传感器7和第二舵角传感器8都发生了故障的情况下,也能够基于第一电机旋转角传感器9c的输出信号取得有关方向盘6的旋转量的信息。
第二电动机13包括第二转子13a、第二定子13b和第二电机旋转角传感器13c,第二电机旋转角传感器13c能够检测第二转子13a的旋转位置,转向机构控制装置5基于第二电机旋转角传感器13c的输出信号,生成与前轮14的转向角相关的信号。由此,在第一齿条位置传感器11和第二齿条位置传感器12都发生故障的情况下,也能够基于第二电机旋转角传感器13c的输出信号取得关于前轮14的转向角的信息。
第二舵角传感器8从转向机构控制装置5接受电力的供给。由此,即使转向输入机构2的电源电路发生了故障,第二转舵传感器8也因为从转向机构控制装置5接受电力的供给,所以能够继续输出第二转向量信号。
转向机构控制装置5相对于第二转向角传感器8输出指示开始输出第二转向操作量信号的第二转向操作量信号输出指示信号,第二转向角传感器8在接收到第二转向操作量信号输出指示信号时,相对于转向机构控制装置5输出第二转向操作量信号。由此,即使在转向输入机构2的电源电路发生了故障的情况下,第二转向角传感器8也能够从转向机构控制装置5接收第二转向操作量信号输出指示信号,因此能够继续输出第二转向操作量信号。
转向机构控制装置5的信号比较部47通过比较经由第一CAN通信线19从转向输入机构2发送到转向机构控制装置5的第一转向操作量信号和经由通信线17从转向输入机构2发送到转向机构控制装置5的第二转向操作量信号,判断第一转向操作量信号或第二转向操作量信号有无异常。由此,在第二微处理器41故障时,也能够通过第一转向操作量信号和第二转向操作量信号的比较来实施信号的异常判断。
〔实施方式2〕
实施方式2的基本结构与实施方式1相同,因此仅说明与实施方式1不同的部分。
图3是实施方式2的转向装置1A的电路框图。
第二舵角传感器8和转向机构控制装置5通过通信线43直接连接。
第三电源44作为第二舵角传感器8的电源并供给。第三电源44与第一电池21和第二电池22连接。第三接口45对从第二舵角传感器8接收到的第二转向操作量信号进行解码。第二电机旋转角传感器13c具有3个电机旋转角传感器13c1、13c2、13c3。
转向机构控制装置5具有第三微处理器(转向机构第三微处理器)46。第三微处理器46具有第三转向促动器控制部46a和第三转向量信号输出部46b。第三转向促动器控制部46a从第三接口45输入第二转向操作量信号,从第二CAN驱动器38输入第二转向量信号,输出驱动控制第二电动机13的第三转向促动器驱动信号。另外,第三转向促动器控制部46a向第二转向角传感器8输出指示开始第二转向操作量信号的输出的第二转向操作量信号输出指示信号。第二舵角传感器8在接收到第二转向操作量信号输出指示信号时,输出第二转向操作量信号。第二逆变器42基于第三转向促动器驱动信号将来自第一电池21或第二电池22的直流电转换为交流电,并向第二电动机13供给。
由于实施方式2的转向装置1A具有第三微处理器46,所以在转向机构控制装置5中,在第一微处理处理器39和第二微处理器41都发生了故障的情况下,也能够基于第二转向操作量信号继续进行转向控制。
[其他实施方式]
以上,对用于实施本发明的实施方式进行了说明,但本发明的具体构成不限于实施方式的构成,即使有不脱离发明主旨的范围的设计变更等,也包含在本发明中。
例如,转向部件不限于齿条和转向摇臂,还包括设置在转向促动器和转向轮之间的其他连杆机构。
第一和第二转向量信号例如不限于与齿条的行程位置相关的信号,也能够以是与对应于齿条的运动而旋转的部件的旋转量相关的信号,除此之外,也包含对应于转向轮的转向角的变化而变化的信号、即能够推定转向轮的转向角的信号。
关于能够从以上说明的实施方式掌握的技术思想,以下进行记载。
在本发明的一方面,转向装置具有:转向输入机构,其包括转向操作输入部件、第一转向操作量传感器、第二转向操作量传感器和反力促动器,所述转向操作输入部件能够进行对应于驾驶员的转向操作的运动,所述第一转向操作量传感器能够输出与所述转向操作输入部件的运动量有关的信号即第一转向操作量信号,所述第二转向操作量传感器能够输出与所述转向操作输入部件的运动量有关的信号即第二转向操作量信号,所述反力促动器能够对所述转向操作输入部件产生使相对于所述驾驶员的转向操作的转向负荷增大的力;转向机构,其包括转向部件、第一转向量传感器、第二转向量传感器和转向促动器,所述第一转向量传感器能够输出与所述转向轮的转向角相关的信号即第一转向量信号,所述第二转向量传感器能够输出与所述转向轮的转向角相关的信号即第二转向量信号,所述转向促动器能够基于转向促动器驱动信号产生经由所述转向部件使转向轮转向的力;转向输入机构控制装置,其包括输入机构第一微处理器和输入机构第二微处理器,所述输入机构第一微处理器包括第一反力促动器控制部和第一转向操作量信号输出部,所述第一反力促动器控制部输出驱动控制所述反力促动器的第一反力促动器驱动信号,所述第一转向操作量信号输出部能够向转向机构控制装置输出所述第一转向量信号,所述输入机构第二微处理器包括第二反力促动器控制部,所述第二反力促动器控制部输出驱动控制所述反力促动器的第二反力促动器驱动信号;转向机构控制装置,其包括转向机构第一微处理器和转向机构第二微处理器,所述转向机构第一微处理器具备第一转向促动器控制部,所述第一转向促动器控制部输出所述第一转向操作量信号或所述第二转向操作量信号、以及基于所述第一转向量信号或所述第二转向量信号驱动控制所述转向促动器的第一转向促动器驱动信号,所述转向机构第二微处理器具备第二转向促动器控制部,所述第二转向促动器控制部输出所述第一转向操作量信号或所述第二转向操作量信号、以及基于所述第一转向量信号或所述第二转向量信号驱动控制所述转向促动器的第二转向促动器驱动信号;第一通信回路,其设置在所述转向输入机构与所述转向机构控制装置之间,将从所述第一转向操作量信号输出部输出的所述第一转向操作量信号向所述转向机构控制装置输出;第二通信回路,其设置在所述转向输入机构与所述转向机构控制装置之间,不经由所述输入机构第一微处理器,将所述第二转向操作量信号向所述转向机构控制装置输出。
优选的是,在上述方式中,还具有第三通信回路,所述输入机构第二微处理器包括第二转向操作量信号输出部,所述第三通信回路设置在所述转向输入机构与所述转向机构控制装置之间,将从所述第二转向操作量信号输出部输出的所述第二转向操作量信号向所述转向机构控制装置输出。
在另一优选方式中,在上述方面的任一方面中,所述转向输入机构是方向盘,所述第一转向操作量传感器是检测所述方向盘的旋转量的第一转向角传感器,所述第二转向操作量传感器是检测所述方向盘的旋转量的第二转向角传感器。
在另一优选方式中,在上述方面的任一方面中,所述反力促动器是第一电动机,所述第一电动机包括第一转子、第一定子和第一电机旋转角传感器,所述第一电机旋转角传感器能够检测所述第一转子的旋转位置,所述转向输入机构控制装置基于所述第一电机旋转角传感器的输出信号,生成与所述方向盘的旋转量相关的信号。
在另一优选方式中,在上述方面的任一方面中,所述转向促动器是第二电动机,所述第二电动机包括第二转子、第二定子、第二电机旋转角传感器,所述第二电机旋转角传感器能够检测所述第二转子的旋转位置,所述转向机构控制装置基于所述第二电机旋转角传感器的输出信号,生成与所述转向轮的转向角相关的信号。
在另一优选方式中,在上述方面的任一方面中,所述第二转向操作量传感器从所述转向机构控制装置接受电力的供给。
在另一优选方式中,在上述方面的任一方面中,所述转向机构控制装置相对于所述第二转向操作量传感器输出指示开始所述第二转向操作量信号的输出的第二转向操作量信号输出指示信号,所述第二转向操作量传感器在接收到所述第二转向操作量信号输出指示信号时,相对于所述转向机构控制装置输出所述第二转向操作量信号。
在另一优选方式中,在上述方面的任一方面中,所述转向机构控制装置还具备转向机构第三微处理器,所述转向机构第三微处理器具备第三转向促动器控制部,所述第三转向促动器控制部输出所述第一转向操作量信号或所述第二转向操作量信号、以及基于所述第一转向量信号或所述第二转向量信号驱动控制所述转向促动器的第三转向促动器驱动信号。
在另一优选方式中,在上述方面的任一方面中,所述转向机构控制装置具备信号比较部,所述信号比较部通过对经由所述第一通信回路从所述转向输入机构发送到所述转向机构控制装置的所述第一转向操作量信号、和经由所述第二通信回路从所述转向输入机构发送到所述转向机构控制装置的所述第二转向操作量信号进行比较,判断有无所述第一转向操作信号或所述第二转向操作信号的异常。
另外,本发明不限于上述的实施方式,包括各种变形例。例如,上述实施方式是为了容易理解地说明本发明而详细说明的,不一定限定于具备所说明的全部结构的实施方式。另外,能够以将某个实施方式的构成的一部分置换为其他实施方式的构成,并且也能够以在某实施方式的构成中添加其他实施方式的构成。另外,对于各实施方式的构成的一部分,能够追加、删除、置换其他结构。
本申请基于2018年11月6日提出申请的日本专利申请第2018-208734号要求优先权。通过参照,在本申请中作为整体编入包括2018年11月6日提交的日本专利申请第2018-208734号的说明书、权利要求书、附图以及摘要在内的全部公开内容。
附图标记说明
1:转向装置
2:转向输入机构
3:转向机构
4:转向输入机构控制装置
5:转向机构控制装置
6:方向盘(转向操作输入部件)
7:第一舵角传感器(第一转向操作量传感器)
8:第二舵角传感器(第二转向操作量传感器)
9:第一电动机(反力促动器)
9a:第一转子
9b:第一定子
9c:第一电机旋转角传感器
10:齿条(转向部件)
11:第一齿条位置传感器(第一转向量传感器)
12:第二齿条位置传感器(第二转向量传感器)
13:第二电动机(转向促动器)
13a:第二转子
13b:第二定子
13c:第二电机旋转角传感器
14:前轮(转向轮)
17:通信线(第二通信回路)
19:第一CAN通信线(第一通信回路)
20:第二CAN通信线(第三通信回路)
29:第一微处理器(输入机构第一微处理器)
29a:第一反力促动器控制部
29b:第一转向操作量信号输出部
31:第二微处理器(输入机构第二微处理器)
31a:第二反力促动器控制部
39:第一微处理器(转向机构第一微处理器)
39a:第二转向促动器控制部
39b:第二转向操作量信号输出部
41:第二微处理器(转向机构第二微处理器)
41a:第二转向促动器控制部
46:第三微处理器(转向机构第三微处理器)
46a:第三转向促动器控制部
47:信号比较部。
- 转向装置用轴、转向装置用轴的制造方法及电动助力转向装置
- 电动助力转向装置的控制方法、电动助力转向装置以及搭载了该电动助力转向装置的车辆