一种全智能生活垃圾分类回收机器人
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及垃圾回收技术领域,具体涉及的是一种全智能生活垃圾分类回收机器人。
背景技术
垃圾分类,一般是指按一定规定或标准将垃圾分类储存、投放和搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用,减少垃圾处理量和处理设备的使用,降低处理成本,减少土地资源的消耗,具有社会、经济、生态等几方面的效益。
生活中最常见垃圾主要包括有塑料垃圾,金属垃圾以及其他垃圾。塑料垃圾和金属垃圾大部分为可回收垃圾,因此可对其进行分类回收并再次利用。现有的垃圾分类主要依靠人工分类,人工分类容易将垃圾投错分类箱,导致效率低下。并且分类的环境卫生较差,分类人员容易划伤和感染。
有鉴于此,本申请人针对上述问题进行深入研究,遂有本案产生。
发明内容
本发明的主要目的在于提供一种全智能生活垃圾分类回收机器人,可对生活垃圾进行自动化分类回收,提高垃圾分类效率。
为了达成上述目的,本发明的解决方案是:
一种全智能生活垃圾分类回收机器人,包括垃圾收集箱,所述垃圾收集箱的下端设有出料口,其中,还包括垃圾破碎装置,垃圾清洁装置,变速输送带以及垃圾筛选装置,所述垃圾破碎装置设在出料口的下方,所述垃圾清洁装置与垃圾破碎装置连接,所述变速输送带连接垃圾清洁装置和垃圾筛选装置。
进一步的,所述垃圾破碎装置包括破碎输送带,破碎外罩以及破碎辊,所述破碎外罩设在破碎输送带上,所述破碎辊与破碎外罩转动连接,所述破碎辊上设有尖刺。
进一步的,所述破碎辊的轴线方向与破碎输送带的送料方向垂直。
进一步的,所述垃圾清洁装置包括清洁输送带,所述清洁输送带设在垃圾破碎装置的下方,垃圾清洁装置上设有喷水装置。
进一步的,所述清洁输送带上设有烘干装置。
进一步的,所述清洁输送带上还设有消毒装置。
进一步的,所述变速输送带包括依次连接的过渡输送带,慢速输送带以及快速输送带。
进一步的,所述过渡输送带的前端设有输送框架,输送框架具有容置槽,所述过渡输送带上设有垂直设置的输送隔板。
进一步的,所述过渡输送带的出料端设有导向块,所述导向块具有导向斜面,所述导向斜面由过渡输送带朝向慢速输送带方向逐渐向下倾斜。
进一步的,所述快速输送带的输送速度大于慢速输送带的输送速度。
进一步的,所述垃圾筛选装置包括包括荧光探测器,筛选输送带,筛选隔板,导向隔板,以及若干个回收装置,所述荧光探测器设置在变速输送带上,所述筛选输送带与变速输送带连接,所述筛选隔板和导向隔板设置在筛选输送带的上方,所述筛选隔板的前端与变速输送带的出料端转动连接,所述导向隔板的后端与回收装置的进料端转动连接。
进一步的,所述回收装置包括回收输送带以及回收箱,所述回收输送带的进料端与筛选输送带的出料端连接,所述导向隔板的后端与回收输送带的进料端转动连接。
进一步的,所述回收装置包括回收塑料垃圾的第一回收装置,回收其他垃圾的第二回收装置以及回收玻璃垃圾的第三回收装置,所述第一回收装置包括第一回收输送带和第一回收箱,所述第二回收装置包括第二回收输送带和第二回收箱,所述第三回收装置包括第三回收输送带和第三回收箱。
进一步的,所述回收装置还包括铁制回收装置,所述铁制回收装置包括磁性输送带以及铁制回收箱,所述磁性输送带设置在第二回收输送带的上方。
进一步的,所述垃圾收集箱上方还设有运输平台,运输平台具有与垃圾收集箱连通的进料通道,所述进料通道上设有滑动挡板。
进一步的,所述运输平台的侧边设有车箱夹取装置,所述车箱夹取装置包括水平轨道,支撑立柱,水平驱动缸体以及转动顶板,所述水平轨道设置在运输平台的两侧,支撑立柱滑动连接于水平轨道上,所述水平驱动缸体设置在支撑立柱的上端,所述转动顶板设在水平驱动缸体的动力输出端。
采用上述结构后,垃圾收集箱收集垃圾转运车上的垃圾,垃圾由出料口掉落至垃圾破碎装置上,垃圾破碎装置将垃圾袋刺破,使垃圾可以充分散落并输送至垃圾清洁装置进行清洗,垃圾清洁装置将垃圾进行清洗,烘干并消毒后输送至变速输送带上,变速输送带对垃圾进行自动排列,最后垃圾被输送至垃圾筛选装置,垃圾筛选装置将塑料垃圾,玻璃垃圾,铁制垃圾以及其他垃圾进行识别后,输送至对应的回收箱内。
与现有技术相比,有益效果在于,本发明能够对垃圾进行自动化分类并回收,提高垃圾分类效率。并且可对垃圾进行清洗,避免垃圾再次受到污染。此外,回收时无需人工操作,保障人身安全并降低人工成本。
附图说明
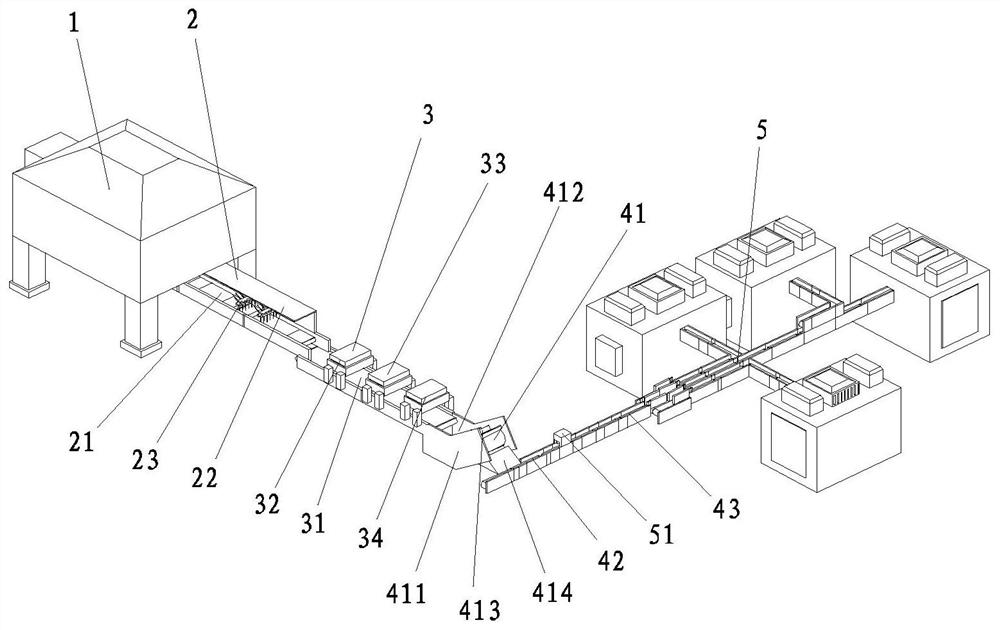
图1为本发明的外形结构立体图。
图2为垃圾筛选装置的外形结构立体图。
图3为运输平台的外形结构立体图。
具体实施方式
为了进一步解释本发明的技术方案,下面通过具体实施例来对本发明进行详细阐述。
如图1-3所示,一种全智能生活垃圾分类回收机器人,包括垃圾收集箱1,垃圾收集箱1的下端设有出料口,其中,还包括垃圾破碎装置2,垃圾清洁装置3,变速输送带4以及垃圾筛选装置5,垃圾破碎装置2设在出料口的下方,垃圾清洁装置3与垃圾破碎装置2连接,变速输送带4连接垃圾清洁装置3和垃圾筛选装置5。
采用上述结构后,垃圾收集箱1收集垃圾转运车上的垃圾,垃圾由出料口掉落至垃圾破碎装置2上,垃圾破碎装置2将垃圾袋刺破,使垃圾可以充分散落并输送至垃圾清洁装置3进行清洗,垃圾清洁装置3将垃圾进行清洗,烘干并消毒后输送至变速输送带4上,变速输送带4对垃圾进行自动排列,最后垃圾被输送至垃圾筛选装置5,垃圾筛选装置5将塑料垃圾,玻璃垃圾,铁制垃圾以及其他垃圾进行识别后,输送至对应的回收箱内。
与现有技术相比,有益效果在于,本发明能够对垃圾进行自动化分类并回收,提高垃圾分类效率。并且可对垃圾进行清洗,避免垃圾再次受到污染。此外,回收时无需人工操作,保障人身安全并降低人工成本。
优选的,垃圾破碎装置2包括破碎输送带21,破碎外罩22以及破碎辊23,破碎外罩22设在破碎输送带21上,破碎辊23与破碎外罩22转动连接,破碎辊23上设有尖刺。采用上述结构,破碎辊23具体可采用电机驱动转动,袋装垃圾通过破碎输送带21向前输送,破碎辊23转动并驱动尖刺刺破搅烂垃圾袋,使垃圾袋内的垃圾能够充分散落在破碎输送带21上,便于垃圾进一步清洁和筛选。
优选的,破碎辊23的轴线方向与破碎输送带21的送料方向垂直,采用上述结构后,可使破碎辊23具有更好的搅动效果,使垃圾分散更加均匀。
优选的,垃圾清洁装置3包括清洁输送带31,清洁输送带31设在垃圾破碎装置2的下方,垃圾清洁装置3上设有喷水装置32。采用上述结构后喷水装置32于清洁输送带31的上方设有多个喷头,喷头对清洁输送带31上的垃圾喷水进行清洁。
优选的,清洁输送带31上设有烘干装置33,烘干装置33可加速烘干垃圾,避免过多的水残留在垃圾上。
优选的,清洁输送带31上还设有消毒装置34,消毒装置34可对垃圾喷洒消毒剂,对垃圾进行杀菌,使回收的垃圾更加清洁。
优选的,变速输送带4包括依次连接的过渡输送带41,慢速输送带42以及快速输送带43,过渡输送带41设置在清洁输送带31的出料端的下方。
更优选的,过渡输送带41的前端设有输送框架411,输送框架411具有容置槽412,过渡输送带41上设有垂直设置的输送隔板413,采用上述结构后,清洁输送带31上的垃圾先掉落至容置槽412内堆放,然后过渡输送带41通过输送隔板413对垃圾进行间隔输送。
优选的,过渡输送带41的出料端设有导向块414,导向块414具有导向斜面,导向斜面由过渡输送带41朝向慢速输送带42方向逐渐向下倾斜。采用上述结构后,使得垃圾能够更加精准的落入慢速输送带42内。
优选的,快速输送带43的输送速度大于慢速输送带42的输送速度。并且慢速输送带42和快速输送带43的宽度较窄,使垃圾只能依次单独输送。采用上述结构后,由于慢速输送带42的输送速度较慢,因此垃圾可以在慢速输送带42上缓慢输送,而快速输送带43的输送速度较快,使得垃圾可快速向下输送,如此一来,垃圾在输送时产生了速度差,因此可在快速输送带43上按顺序自动排列,并且垃圾之间的间距更大,使垃圾输送更加间隔有序。
优选的,垃圾筛选装置5包括包括荧光探测器51,筛选输送带52,筛选隔板53,导向隔板54,以及若干个回收装置55,荧光探测器51设置在变速输送带4上,具体可设置在快速输送带43上,筛选输送带52与变速输送带4连接,筛选隔板53和导向隔板54设置在筛选输送带52的上方,筛选隔板53的前端与变速输送带4的出料端转动连接,导向隔板54的后端与回收装置55的进料端转动连接。采用上述结构后,采用上述结构后,为了使筛选装置能够对塑料垃圾和玻璃垃圾进行分类,需要塑料制造厂家和玻璃制造厂家在生产产品时在其产品表面涂一层对人体无害的荧光剂,只有在特定的光照下才会发光,并且塑料产品和玻璃产品的荧光剂颜色不同。如此一来,在筛选时,荧光探测器51对快速输送带43上的垃圾进行荧光识别,然后将信号输送至控制系统,控制系统控制筛选隔板53和对应的回收装置55的导向隔板54相对转动连通成一条输送通道,接着垃圾通过筛选输送带52经输送通道导向输送至对应的回收装置55内回收,与现有技术相比,可实现对塑料垃圾、玻璃垃圾以及其他垃圾进行自动化识别并分类回收,进一步提高垃圾分类回收的效率。
优选的,回收装置55包括回收输送带以及回收箱,回收输送带的进料端与筛选输送带52的出料端连接,导向隔板54的后端与回收输送带的进料端转动连接。采用上述结构,导向隔板54对筛选输送带52上的垃圾进行导向进入回收输送带。
优选的,在本实施例中,回收装置55包括回收塑料垃圾的第一回收装置,回收其他垃圾的第二回收装置以及回收玻璃垃圾的第三回收装置,第一回收装置包括第一回收输送带551和第一回收箱552,第二回收装置包括第二回收输送带553和第二回收箱554,第三回收装置包括第三回收输送带555和第三回收箱556,第一回收输送带551,第二回收输送带553以及第三回收输送带555并排设置在筛选输送带52的末端。
优选的,回收装置55还包括铁制回收装置,铁制回收装置包括磁性输送带557以及铁制回收箱558,磁性输送带557设置在第二回收输送带553的上方。采用上述结构后,当其他垃圾由第二回收输送带553输送时,磁性输送带557将铁质垃圾吸附起来,并输送至铁制回收箱558内,铁制回收箱558内设有分离刮刀,分离刮刀垂直设置在磁性输送带557的侧边分离刮刀可刮动铁质垃圾,使铁质垃圾与磁性输送带557分离并落入铁制回收箱558内部。
优选的,垃圾收集箱1上方还设有运输平台6,运输平台6具有与垃圾收集箱1连通的进料通道61,进料通道61上设有滑动挡板62,滑动挡板62可通过缸体驱动,并且运输平台6上设有供滑动挡板62滑动的滑动槽。。运输平台6的侧边设有车箱夹取装置,车箱夹取装置包括水平轨道63,支撑立柱64,水平驱动缸体以及转动顶板65,水平轨道63设置在运输平台6的两侧,支撑立柱64滑动连接于水平轨道63上,水平驱动缸体设置在支撑立柱64的上端,转动顶板65设在水平驱动缸体的动力输出端。采用上述结构后,垃圾运输车的车箱与车体可拆卸装置,并且可通车箱夹取装置将车箱从车体上取下,然后滑动挡板62相互分离使车箱进入进料通道61,之后滑动挡板62滑动卡紧并密封车箱,直至车箱内的垃圾完全倒出后,滑动挡板62松开车箱,车箱夹取装置将车箱重新安装回车体上。如此一来,可避免垃圾与外界接触而造成污染。
上述实施例和图式并非限定本发明的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本发明的专利范畴。
- 一种全智能生活垃圾分类回收机器人
- 一种生活垃圾分类回收箱