一种机载雷达飞行路径与发射波形选择联合优化方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于雷达信号处理的技术领域,具体提出一种机载雷达飞行路径与发射波形选择联合优化方法。
背景技术
随着现代雷达战场对抗技术的不断发展,无源探测系统对飞行器及其所搭载有源电子设备的探测能力得到了显著提高,飞行器在现代作战环境中的生存能力和突防能力受到了严重威胁。飞行器射频隐身技术作为一种重要的有源隐身技术,是对抗敌方无源探测系统,保障雷达探测系统及其搭载平台先敌发现、先敌打击、先敌摧毁的重要技术手段,在现代战场中起着重要作用。
目前,已有的研究成果虽然涉及面向射频隐身的雷达发射参数优化问题,在满足雷达发射参数资源为约束条件下,优化雷达发射参数,在一定程度上提升了系统的射频隐身性能。但是,未能考虑机载雷达飞行路径对系统的射频隐身性能和目标跟踪性能的影响,忽视了飞行器机动性带来的优势。
由于现有技术中尚未有同时考虑射频隐身性能和目标跟踪性能的机载雷达飞行路径与发射波形选择联合优化方法,具有一定的局限性。基于此,本专利提出机载雷达飞行路径与发射波形选择联合优化方法,通过优化飞行路径与发射波形选择,以达到同时优化机载雷达射频隐身性能和目标跟踪性能的目的。
发明内容
发明目的:本发明提供一种机载雷达飞行路径与发射波形选择联合优化方法,能同时优化机载雷达目标跟踪过程中的射频隐身性能和目标跟踪性能。
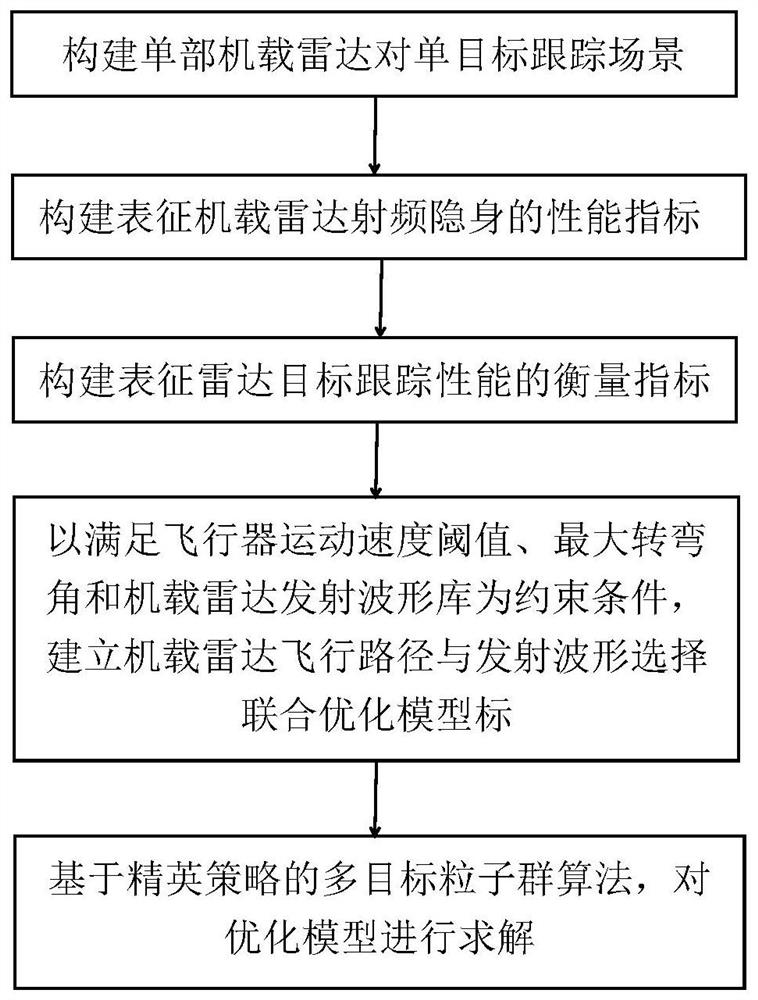
技术方案:本发明所述的一种机载雷达飞行路径与发射波形选择联合优化方法,包括以下步骤:
(1)构建单部机载雷达对单目标跟踪场景,机载雷达发射高斯线性调频信号对目标进行探测,对接收到的雷达信号进行处理,通过扩展卡尔曼滤波算法对目标进行跟踪;
(2)构建表征机载雷达射频隐身的性能指标;
(3)采用下一时刻目标状态估计误差的BCRLB预测值作为表征雷达目标跟踪性能的衡量指标;
(4)以同时最小化下一时刻目标状态估计误差的BCRLB预测值和无源截获接收机对机载雷达发射信号的截获概率为优化目标,以满足飞行器运动速度阈值、最大转弯角和机载雷达发射波形库为约束条件,建立机载雷达飞行路径与发射波形选择联合优化模型;
(5)基于精英策略的多目标粒子群算法,优化设计下一时刻飞行器运动速度、运动角度以及机载雷达发射波形参数,确定该时刻的飞行路径。
进一步地,步骤(1)所述的单部机载雷达对单目标跟踪的实现过程如下:
k时刻的飞行器位置[x
式中,v
进一步地,所述步骤(2)实现过程如下:
采用k+1时刻敌方无源探测系统对机载雷达的截获概率p
式中,erfc(·)表示互补误差函数;P
进一步地,所述步骤(3)实现过程如下:
目标状态估计误差的k+1时刻BCRLB预测值C
结合k时刻目标状态的贝叶斯信息矩阵J(X
C
式中,上标()
式中,T表示转换矩阵,T=diag(c/2,c/2ω
式中,G
进一步地,步骤(4)所述的机载雷达飞行路径与发射波形选择联合优化模型为:
式中,Θ表示机载雷达发射波形库;θ
进一步地,所述步骤(5)实现过程如下:
(51)种群初始化模块随机初始化粒子的位置S和速度V,设置循环次数I
(52)根据截获概率和BCRLB预测值确定粒子的适应度值;
(53)更新粒子速度和位置信息:
S
式中,ω为惯性权重;r
(54)根据精英策略选取全局最优粒子,对粒子的截获概率和BCRLB预测值进行归一化处理,选取归一化最小值的粒子作为全局最优粒子;
(55)不断迭代直到达到迭代次数I
(56)根据下一时刻的飞行器运动速度和运动角度,计算出这一时刻的飞行路径。
有益效果:与现有技术相比,本发明的有益效果:本发明同时优化机载雷达目标跟踪过程中的射频隐身性能和目标跟踪性能,不仅提高了机载雷达目标跟踪精度,而且降低了敌方无源探测系统对机载雷达发射信号的截获概率,有效提升了机载雷达的射频隐身性能。
附图说明
图1为本发明的流程图;
图2为基于精英策略的粒子群算法流程图。
具体实施方式
下面结合附图对本发明作进一步详细说明。
本发明提供一种机载雷达飞行路径与发射波形选择联合优化方法,如图1所示,具体包括以下步骤:
步骤1:构建单部机载雷达对单目标跟踪场景,机载雷达发射高斯线性调频信号对目标进行探测,对接收到的雷达信号进行处理,通过扩展卡尔曼滤波算法对目标进行跟踪。
飞行器通过优化k时刻的飞行路径和k+1时刻的发射波形,不仅提升了机载雷达的射频隐身性能,而且提高了机载雷达目标跟踪性能。假设飞行器在一个时刻内是做匀速直线运动、匀加\减速直线运动或匀加\减速曲线运动,则已知k时刻的飞行器运动速度v
步骤2:构建表征机载雷达射频隐身的性能指标。
采用k+1时刻敌方无源探测系统对机载雷达的截获概率p
式中,erfc(·)表示互补误差函数;P
步骤3:采用下一时刻目标状态估计误差的BCRLB预测值作为表征雷达目标跟踪性能的衡量指标。
目标状态估计误差的k+1时刻BCRLB预测值C
结合k时刻目标状态的贝叶斯信息矩阵J(X
C
式中,上标()
式中,T表示转换矩阵,T=diag(c/2,c/2ω
式中,G
步骤4:建立机载雷达飞行路径与发射波形选择联合优化模型。
以同时最小化下一时刻目标状态估计误差的BCRLB预测值和无源截获接收机对机载雷达发射信号的截获概率为优化目标,以满足飞行器运动速度阈值、最大转弯角和机载雷达发射波形库为约束条件,建立机载雷达飞行路径与发射波形选择联合优化模型。
式中,Θ表示机载雷达发射波形库;θ
步骤5:优化模型的求解:基于精英策略的多目标粒子群算法对优化模型进行求解,得到下一时刻最优的飞行器运动速度和运动角度以及机载雷达发射波形参数。如图2所示,具体步骤如下:
首先,种群初始化模块随机初始化粒子的位置S和速度V,设置循环次数I
S
式中,ω为惯性权重;r
再次,根据精英策略选取全局最优粒子,对粒子的截获概率和BCRLB预测值进行归一化处理,选取归一化最小值的粒子作为全局最优粒子;接着,不断迭代直到达到迭代次数I
- 一种机载雷达飞行路径与发射波形选择联合优化方法
- 面向目标跟踪的多平台雷达路径与波形选择联合优化方法