一种医用配送机器人及其控制系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及智能机器人技术领域,具体地说,涉及一种医用配送机器人及其控制系统。
背景技术
随着社会的不断发展,医疗资源已经远远无法满足城镇人口的就医需求,在医疗机构中,医护人员不仅要给患者提供诊断治疗、医学护理等服务,还要给患者提供各种物品的配送任务,不仅耗费大量人力物力和时间,而且针对一些特殊的病患,大量不同的人来往接触,可能造成患者或医护人员之间的交叉感染。因此,在人力和物资有限的情况下,为提高医务人员工作效率及降低交叉感染的风险,可以考虑设计配送机器人。但是,目前却没有可以较好实现配送任务的机器人及其控制系统。
发明内容
本发明的目的在于提供了一种医用配送机器人及其控制系统,以解决上述背景技术中提出的问题。
为实现上述技术问题的解决,本发明的目的之一在于,提供了一种医用配送机器人,包括机座,所述机座内部底端设有行走机构,所述机座内部设有处理主机,所述机座的正上方通过升降杆连接有储物箱,所述储物箱内部从上至下依次设有保温食物仓和药品仓,所述药品仓的中间处固定卡接有隔板,所述保温食物仓与所述药品仓的前端仓口内侧均通过铰链铰接有仓门,所述保温食物仓与所述药品仓的内部后端处均设有助推机构,所述保温食物仓与所述药品仓的内部顶端中间处均设有紫外线灯,所述储物箱的左右两侧外均转动连接有消毒机械臂,所述储物箱的顶端转动连接有主操作器,所述主操作器的正面内部固定嵌设有双目摄像头,所述主操作器的正面中间处从下至上依次嵌设有音频模块、红外探测器和距离传感装置,所述主操作器内部设有感知控制器。
作为本技术方案的进一步改进,所述行走机构、所述升降杆、所述助推机构、所述紫外线灯、所述消毒机械臂、所述感知控制器均分别通过信号线与所述处理主机信号连接。
作为本技术方案的进一步改进,所述双目摄像头、所述音频模块、所述红外探测器、所述距离传感装置均分别通过信号线与所述感知控制器信号连接。
本发明的目的之二在于,提供了一种医用配送机器人的控制系统,该系统装载于上述的医用配送机器人内部并控制机器人的运行过程,包括
基础建设单元、智能调控单元和功能服务单元;所述基础建设单元、所述智能调控单元与所述功能服务单元依次通过以太网通讯连接;所述基础建设单元用于提供支持系统运行的基础装置设备、智能技术;所述智能调控单元用于对系统的运行过程进行统一调控,并分别对各基础功能系统进行自治管理;所述功能服务单元用于以在系统运行的基础上,给用户提供多种智能服务以完善机器人的通用性能;
所述基础建设单元包括终端载体模块、状态感知模块、技术支持模块和网络通信模块;
所述智能调控单元包括集中管控模块、行走管理模块、助推系统模块、升降控制模块和语音识别模块;
所述功能服务单元包括定时提醒模块、安全验证模块、电源管理模块和自动消毒模块。
作为本技术方案的进一步改进,所述终端载体模块、所述状态感知模块与所述技术支持模块依次通过以太网通讯连接;所述终端载体模块用于在机器人内部设置若干处理器及控制器以作为装载系统的载体及作为执行系统指令的执行机构;所述状态感知模块用于通过部署在机器人内部的各类传感装置实时采集机器人外部环境的状态参数;所述技术支持模块用于通过加载在系统内部的多种智能技术以确保系统运行更流畅;所述网络通信模块用于在系统各层面之间建立连接及数据传输的通道。
其中,终端载体包括但不限于处理器、显示屏、仓门控制器、行走驱动控制器、升降装置、助推机构控制器、灯具开关控制器、机械臂控制器、感知控制器等。
其中,感知传感器包括但不限于摄像头、录音器、音频播放器、红外线探测仪、距离传感器、温湿度传感器、计时器等。
其中,智能技术包括但不限于语音识别技术、电磁锁控制技术、智能行走技术、红外探测技术等。
其中,网络通信技术包括但不限于有限通信、无线WiFi、蓝牙、数据流量、5G通信模块等。
作为本技术方案的进一步改进,所述集中管控模块的信号输出端与所述行走管理模块、所述助推系统模块、所述升降控制模块、所述语音识别模块的信号输入端连接,所述行走管理模块、所述助推系统模块、所述升降控制模块与所述语音识别模块并列运行且依次通过以太网通讯连接;所述集中管控模块用于通过主处理器对系统的运行过程进行集中管理及统一分配;所述行走管理模块用于对机器人的行走过程进行管理和控制;所述助推系统模块用于对布设在机器人内部的助推机构进行管理控制;所述升降控制模块用于通过处理器经控制器控制升降装置的运行过程;所述语音识别模块用于获取用户的语音指令,并经语音识别后将指令下放到各个执行机构处。
作为本技术方案的进一步改进,所述行走管理模块包括路径规划模块、避障保护模块、跨层连接模块和智能巡航模块;所述路径规划模块、所述避障保护模块、所述跨层连接模块与所述智能巡航模块依次通过以太网通讯连接且并列运行;所述路径规划模块用于录入工作空间的三维立体图形并根据工作指令自动规划运行路径;所述避障保护模块用于以各种智能探测技术为基础,实现机器人运行过程中的自动避障、防跌防撞及紧急制动的功能;所述跨层连接模块用于通过无线通信技术与智慧电梯系统相连接使机器人与电梯互相配合运行以实现跨楼层配送物品的功能;所述智能巡航模块用于按照预先设定的程序参数实现自动巡航的功能并可调节控制巡航速度。
作为本技术方案的进一步改进,所述路径规划模块采用曼哈顿距离算法,其公式为:
d=|x
其中,(x
作为本技术方案的进一步改进,所述定时提醒模块、所述安全验证模块、所述电源管理模块与所述自动消毒模块依次通过以太网通讯连接并独立运行;所述定时提醒模块用于通过与医护人员佩戴的智能终端连接以便定时提醒医护人员为患者准备药品、用餐物品等;所述安全验证模块用于通过多种用户身份识别技术来验证用户的身份以减低错拿、误拿的风险;所述电源管理模块用于管理机器人的电源分配并控制机器人在工作结束后自动归位充电;所述自动消毒模块用于控制机器人定期进行内外部的自动消毒操作过程。
其中,内部消毒通过设置在机器人内部的紫外线消毒灯完成,外部消毒通过消毒机械臂自动擦拭完成。
作为本技术方案的进一步改进,所述安全验证模块包括权限登记模块、人脸识别模块、指纹识别模块和声音识别模块;所述权限登记模块的信号输出端同时与所述人脸识别模块、所述指纹识别模块、所述声音识别模块的信号输入端连接;所述权限登记模块用于预先登记录入用户的身份信息;所述人脸识别模块用于通过摄像头采集用户的人脸信息并通过人脸识别技术判断用户的身份及分配权限;所述指纹识别模块用于采集用户的指纹信息并通过指纹识别技术判断用户的身份及分配对应权限;所述声音识别模块用于采集用户的声音信息并通过声音识别技术判断用户的身份及分配对应权限。
其中,预先登记用户的身份信息包括但不限于用户的音视频信息、照片信息、人脸信息、指纹信息等。
本发明的目的之三在于,提供了一种医用配送机器人的运行方法,包括如下步骤:
S1、给机器人充满电,开机,经试运行后保证各功能正常运行,并在系统内载入医院的立体三维图形,录入各用户的身份信息;
S2、机器人系统定时提醒医护人员给对应患者准备药品或餐品,医护人员将准备好的食物放置在储物箱的保温食物仓内,将药品按固体或液体分别放置在药品仓的不同收纳格内,并输入配送目的地;
S3、机器人按地图及目的地坐标,自动规划配送路径,并自行行走前往,在行走过程中,自动规避障碍物,在遇到跨楼层时,在靠近电梯时与智慧电梯的系统连接,控制电梯自动运行到对应楼层并自动开关门;
S4、机器人行走到目的地病房位置,自动控制储物箱上下升降到与病房传递窗位置相齐平的位置处,用户通过合适的开箱识别方法打开仓门,机器人内部通过助推机构将药品推出,实现药物的传递;
S5、机器人行走到目的地病房位置,自动控制储物箱上下升降到与病房传递窗位置相齐平的位置处,用户通过合适的开箱识别方法打开仓门,机器人内部通过助推机构将餐盘推出,并将餐盘缓慢推向传递窗内,完成配餐任务;
S6、机器人定时按设定的程序,自动在医院内各处进行配送巡航,行走过程中可以通过指令或自动调整行走速度;
S7、机器人完成配送任务后,自动按预设的程序驱动行走机构回到原位,并自动进行充电操作,同时系统控制紫外线灯亮起对储物箱内部进行消毒,并控制消毒机械臂运行对储物箱外侧进行擦拭消毒。
本发明的目的之四在于,提供了一种医用配送机器人的控制系统运行装置,包括处理器、存储器以及存储在存储器中并在处理器上运行的计算机程序,处理器用于执行计算机程序时实现上述任一的医用配送机器人及其控制系统。
本发明的目的之五在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一的医用配送机器人及其控制系统。
与现有技术相比,本发明的有益效果:
1.该医用配送机器人中,通过设置带有行走机构和升降机构的机器人,可以自动运行到预设的目的地并将物品对齐到指定高度进行物品配送,同时通过设置分隔食物和药品的储物箱,储物箱通过多种开箱识别模式,便于安全准确地配送,降低错拿、误拿的风险,另外设置自动消毒功能,不需人工消毒,进一步节省人力资源,降低人员交叉感染的风险;
2.该医用配送机器人的控制系统中,通过在多种智能传感装置可以实时采集机器人运行过程中的各种外部环境参数,并通过计算分析用以给机器人的运行指令提供依据,另外以各种智能技术为基础支持,促进系统流畅运行,提高机器人的智能性和功能完善性。
附图说明
图1为本发明的整体装置结构示意图;
图2为本发明的整体装置结构示意图;
图3为本发明的整体系统装置结构图;
图4为本发明的局部系统装置结构图之一;
图5为本发明的局部系统装置结构图之二;
图6为本发明的局部系统装置结构图之三;
图7为本发明的局部系统装置结构图之四;
图8为本发明的局部系统装置结构图之五;
图9为本发明的示例性计算机程序产品结构图。
图中各个标号意义为:
1、机座;11、行走机构;12、处理主机;
2、升降杆;
3、储物箱;31、保温食物仓;32、药品仓;321、隔板;33、仓门;34、助推机构;34、紫外线灯;
4、消毒机械臂;
5、主操作器;51、双目摄像头;52、音频模块;53、红外探测器;54、距离传感装置;55、感知控制器;
100、基础建设单元;101、终端载体模块;102、状态感知模块;103、技术支持模块;104、网络通信模块;
200、智能调控单元;201、集中管控模块;202、行走管理模块;2021、路径规划模块;2022、避障保护模块;2023、跨层连接模块;2024、智能巡航模块;203、助推系统模块;204、升降控制模块;205、语音识别模块;
300、功能服务单元;301、定时提醒模块;302、安全验证模块;3021、权限登记模块;3022、人脸识别模块;3023、指纹识别模块;3024、声音识别模块;303、电源管理模块;304、自动消毒模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
产品实施例
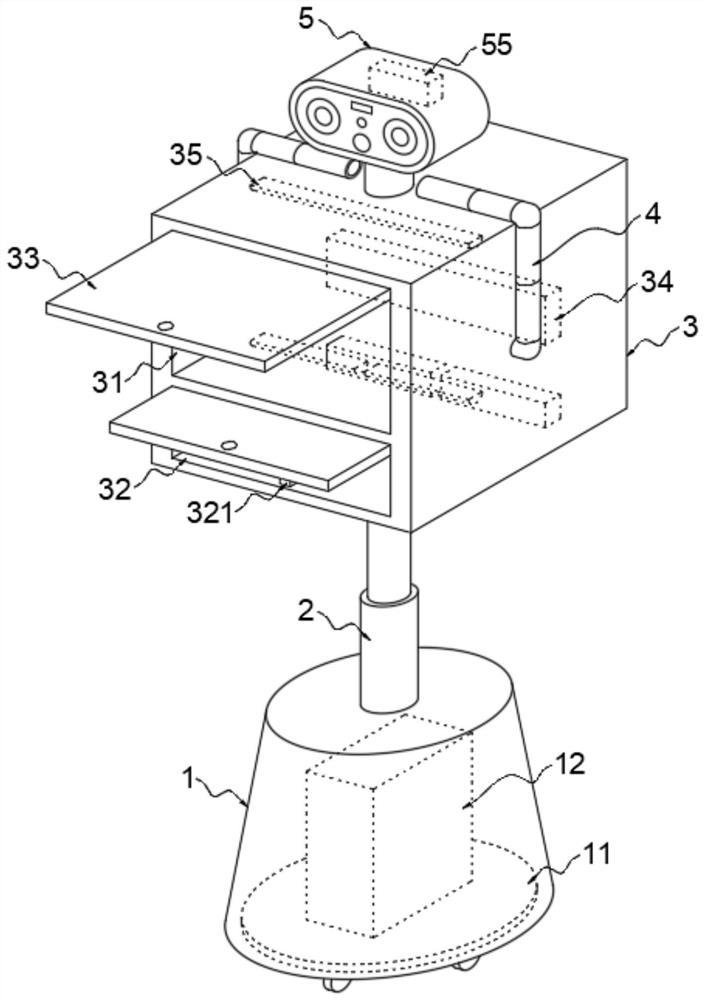
如图1-图2所示,本实施例提供了一种医用配送机器人,包括机座1,机座1内部底端设有行走机构11,机座1内部设有处理主机12,机座1的正上方通过升降杆2连接有储物箱3,储物箱3的左右两侧外均转动连接有消毒机械臂4,储物箱3的顶端转动连接有主操作器5。
本实施例中,储物箱3内部从上至下依次设有保温食物仓31和药品仓32。
具体地,药品仓32的中间处固定卡接有隔板321,用于将药品仓32分隔开,便于将固体或液体的药品分开放置,避免药品不慎翻倒可能导致混合污染。
进一步地,保温食物仓31与药品仓32的前端仓口内侧均通过铰链铰接有仓门33,仓门33上设置有智能电磁锁,便于锁闭储物箱3,避免无关人员随便取用食物或药品。
进一步地,保温食物仓31与药品仓32的内部后端处均设有助推机构34,用于配送物品时将物品向外推出。
进一步地,保温食物仓31与药品仓32的内部顶端中间处均设有紫外线灯34,用于对储物箱3内部进行消毒杀菌操作。
本实施例中,主操作器5的正面内部固定嵌设有双目摄像头51,主操作器5的正面中间处从下至上依次嵌设有音频模块52、红外探测器53和距离传感装置54,主操作器5内部设有感知控制器55。
具体地,双目摄像头51、音频模块52、红外探测器53、距离传感装置54均分别通过信号线与感知控制器55信号连接。
具体地,双目摄像头51用于摄录沿途环境场景,便于通过计算分析使机器人可以避开人、物进而实现平滑运行的过程;音频模块52用于收录用户的语音信息并进行识别,以及向用户发出提醒声音;红外探测器53用于探测机器人周围是否存在障碍物,并可以计算物品的距离及高度,便于准确行走及配送;距离传感器54用于判断外物与机器人之间的间距,便于实现防碰防撞功能,并作为紧急制动的条件判断依据;感知控制器55用于集中管理各传感装置的运行过程并进行数据统计操作。
本实施例中,行走机构11、升降杆2、助推机构34、紫外线灯34、消毒机械臂4、感知控制器55均分别通过信号线与处理主机12信号连接,便于通过处理主机12通过对应的控制器向各个机构下发工作指令。
系统实施例
如图3-图9所示,本实施例提供了一种医用配送机器人的控制系统,该系统装载于上述的医用配送机器人内部并控制机器人的运行过程,包括
基础建设单元100、智能调控单元200和功能服务单元300;基础建设单元100、智能调控单元200与功能服务单元300依次通过以太网通讯连接;基础建设单元100用于提供支持系统运行的基础装置设备、智能技术;智能调控单元200用于对系统的运行过程进行统一调控,并分别对各基础功能系统进行自治管理;功能服务单元300用于以在系统运行的基础上,给用户提供多种智能服务以完善机器人的通用性能;
基础建设单元100包括终端载体模块101、状态感知模块102、技术支持模块103和网络通信模块104;
智能调控单元200包括集中管控模块201、行走管理模块202、助推系统模块203、升降控制模块204和语音识别模块205;
功能服务单元300包括定时提醒模块301、安全验证模块302、电源管理模块303和自动消毒模块304。
本实施例中,终端载体模块101、状态感知模块102与技术支持模块103依次通过以太网通讯连接;终端载体模块101用于在机器人内部设置若干处理器及控制器以作为装载系统的载体及作为执行系统指令的执行机构;状态感知模块102用于通过部署在机器人内部的各类传感装置实时采集机器人外部环境的状态参数;技术支持模块103用于通过加载在系统内部的多种智能技术以确保系统运行更流畅;网络通信模块104用于在系统各层面之间建立连接及数据传输的通道。
其中,终端载体包括但不限于处理器、显示屏、仓门控制器、行走驱动控制器、升降装置、助推机构控制器、灯具开关控制器、机械臂控制器、感知控制器等。
其中,感知传感器包括但不限于摄像头、录音器、音频播放器、红外线探测仪、距离传感器、温湿度传感器、计时器等。
其中,智能技术包括但不限于语音识别技术、电磁锁控制技术、智能行走技术、红外探测技术等。
其中,网络通信技术包括但不限于有限通信、无线WiFi、蓝牙、数据流量、5G通信模块等。
本实施例中,集中管控模块201的信号输出端与行走管理模块202、助推系统模块203、升降控制模块204、语音识别模块205的信号输入端连接,行走管理模块202、助推系统模块203、升降控制模块204与语音识别模块205并列运行且依次通过以太网通讯连接;集中管控模块201用于通过主处理器对系统的运行过程进行集中管理及统一分配;行走管理模块202用于对机器人的行走过程进行管理和控制;助推系统模块203用于对布设在机器人内部的助推机构进行管理控制;升降控制模块204用于通过处理器经控制器控制升降装置的运行过程;语音识别模块205用于获取用户的语音指令,并经语音识别后将指令下放到各个执行机构处。
进一步地,行走管理模块202包括路径规划模块2021、避障保护模块2022、跨层连接模块2023和智能巡航模块2024;路径规划模块2021、避障保护模块2022、跨层连接模块2023与智能巡航模块2024依次通过以太网通讯连接且并列运行;路径规划模块2021用于录入工作空间的三维立体图形并根据工作指令自动规划运行路径;避障保护模块2022用于以各种智能探测技术为基础,实现机器人运行过程中的自动避障、防跌防撞及紧急制动的功能;跨层连接模块2023用于通过无线通信技术与智慧电梯系统相连接使机器人与电梯互相配合运行以实现跨楼层配送物品的功能;智能巡航模块2024用于按照预先设定的程序参数实现自动巡航的功能并可调节控制巡航速度。
具体地,路径规划模块2021采用曼哈顿距离算法,其公式为:
d=|x
其中,(x
本实施例中,定时提醒模块301、安全验证模块302、电源管理模块303与自动消毒模块304依次通过以太网通讯连接并独立运行;定时提醒模块301用于通过与医护人员佩戴的智能终端连接以便定时提醒医护人员为患者准备药品、用餐物品等;安全验证模块302用于通过多种用户身份识别技术来验证用户的身份以减低错拿、误拿的风险;电源管理模块303用于管理机器人的电源分配并控制机器人在工作结束后自动归位充电;自动消毒模块304用于控制机器人定期进行内外部的自动消毒操作过程。
其中,内部消毒通过设置在机器人内部的紫外线消毒灯完成,外部消毒通过消毒机械臂自动擦拭完成。
其中,医护人员佩戴的智能终端可以为智能手环、智能对讲机、手机等。
进一步地,安全验证模块302包括权限登记模块3021、人脸识别模块3022、指纹识别模块3023和声音识别模块3024;权限登记模块3021的信号输出端同时与人脸识别模块3022、指纹识别模块3023、声音识别模块3024的信号输入端连接;权限登记模块3021用于预先登记录入用户的身份信息;人脸识别模块3022用于通过摄像头采集用户的人脸信息并通过人脸识别技术判断用户的身份及分配权限;指纹识别模块3023用于采集用户的指纹信息并通过指纹识别技术判断用户的身份及分配对应权限;声音识别模块3024用于采集用户的声音信息并通过声音识别技术判断用户的身份及分配对应权限。
其中,预先登记用户的身份信息包括但不限于用户的音视频信息、照片信息、人脸信息、指纹信息等。
方法实施例
本实施例提供了一种医用配送机器人的运行方法,包括如下步骤:
S1、给机器人充满电,开机,经试运行后保证各功能正常运行,并在系统内载入医院的立体三维图形,录入各用户的身份信息;
S2、机器人系统定时提醒医护人员给对应患者准备药品或餐品,医护人员将准备好的食物放置在储物箱的保温食物仓内,将药品按固体或液体分别放置在药品仓的不同收纳格内,并输入配送目的地;
S3、机器人按地图及目的地坐标,自动规划配送路径,并自行行走前往,在行走过程中,自动规避障碍物,在遇到跨楼层时,在靠近电梯时与智慧电梯的系统连接,控制电梯自动运行到对应楼层并自动开关门;
S4、机器人行走到目的地病房位置,自动控制储物箱上下升降到与病房传递窗位置相齐平的位置处,用户通过合适的开箱识别方法打开仓门,机器人内部通过助推机构将药品推出,实现药物的传递;
S5、机器人行走到目的地病房位置,自动控制储物箱上下升降到与病房传递窗位置相齐平的位置处,用户通过合适的开箱识别方法打开仓门,机器人内部通过助推机构将餐盘推出,并将餐盘缓慢推向传递窗内,完成配餐任务;
S6、机器人定时按设定的程序,自动在医院内各处进行配送巡航,行走过程中可以通过指令或自动调整行走速度;
S7、机器人完成配送任务后,自动按预设的程序驱动行走机构回到原位,并自动进行充电操作,同时系统控制紫外线灯亮起对储物箱内部进行消毒,并控制消毒机械臂运行对储物箱外侧进行擦拭消毒。
计算机程序产品实施例
参阅图9,示出了一种医用配送机器人的控制系统的运行装置结构示意图,该装置包括处理器、存储器以及存储在存储器中并在处理器上运行的计算机程序。
处理器包括一个或一个以上处理核心,处理器通过总线与处理器相连,存储器用于存储程序指令,处理器执行存储器中的程序指令时实现上述的医用配送机器人及其控制系统。
可选的,存储器可以由任何类型的易失性或非易失性存储设备或者它们的组合实现,如静态随时存取存储器(SRAM),电可擦除可编程只读存储器(EEPROM),可擦除可编程只读存储器(EPROM),可编程只读存储器(PROM),只读存储器(ROM),磁存储器,快闪存储器,磁盘或光盘。
此外,本发明还提供了计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述的一种医用配送机器人及其控制系统。
可选的,本发明还提供了包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述各方面医用配送机器人及其控制系统。
本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,程序可以存储于计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种医用配送机器人及其控制系统
- 一种医用配送机器人