用于对资产执行预测性健康分析的方法和计算系统
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及用于评估资产的健康的技术。本发明特别地涉及用于资产健康的预测评估的方法和设备。
背景技术
电力系统(诸如发电、输电和/或配电系统)以及工业系统包括资产。变压器、发电机和分布式能源(distributed energy resource,DER)单元就是这类资产的示例。资产在操作期间可能受到退化的影响。出于规划、调度维护或更换作业的目的,期望的是执行资产健康分析,该分析至少在某个未来预测时间范围内具有预测性,即使在没有传感器测量值可用于那个时间的情况下。
模拟技术可以用于模拟资产的时间演变。这种模拟技术的参数可以基于为资产群捕获的历史传感器数据。这些模拟为资产的整体统计演变提供了良好的画面。对于大量资产,退化过程将在统计上模仿从模拟中获得的结果。然而,单个资产可能仍然表现出可能显著偏离通过模拟技术获得的预测的行为。
Sang-ri Yi和Junho Song,"Particle Filter Based Monitoring andPrediction of Spatiotemporal Corrosion Using Successive Measurements ofStructural Responses(基于粒子滤波器的使用结构响应的连续测量的时空腐蚀监控和预测)",Sensors 2018,18,3909描述了一种使用连续、间接和有噪声的测量来监控和预测结构退化的时空进展的框架。该框架采用粒子滤波器用于腐蚀状态的实时监控和预测以及腐蚀过程模型中不确定和/或时变参数的概率推理的目的。
X.Si等人,"A General Stochastic Degradation Modeling Approach forPrognostics of Degrading Systems With Surviving and Uncertain Measurements(具有存活和不确定测量的退化系统的预测的通用随机退化建模方法)",IEEE TRANSACTIONSON RELIABILITY,IEEE SERVICE CENTER,PISCATAWAY,NJ,US,第68卷,第3号,2019年9月1日,第1080-1100页公开了一种用于估计剩余使用寿命(remaining useful life,RUL)的技术。最大似然估计框架被提供来基于期望最大化算法以及粒子滤波和平滑化方法来确定模型参数。
J.Z.Sikorska等人,"Prognostic modelling options for remaining usefullife estimation by industry(行业进行的剩余使用寿命估计的预测建模选项)",MECHANICAL SYSTEMS AND SIGNAL PROCESSING,第25卷,第5号,2011年7月1日,第1803-1836页讨论了主要预测模型类的优势和缺点。
发明内容
需要监控资产健康的演变的增强技术。特别需要这种技术,该技术允许对资产健康进行预测性预测,同时允许在传感器测量值可用时结合传感器测量值。需要其中能够使用传感器测量值来更新对资产健康状态的预测性预测的技术。
根据本发明的实施例,提供了独立权利要求中所述的方法和系统。从属权利要求限定了优选实施例。
根据本发明的实施例,使用粒子滤波器(particle filter,PF)技术来更新通过模拟资产健康状态的未来演变而获得的预测。
未来演变可以基于离散马尔可夫链模型,该离散马尔可夫链模型可以用于预测资产的性能退化。马尔可夫链蒙特卡罗(Markov Chain Monte Carlo,MCMC)方法可以用于执行大量模拟。马尔可夫链模型可以具有对应于不同资产健康状态的离散状态的集合。
采用小状态空间和较少数量的转移概率的MCMC技术允许在不同的时间范围(包括可以是几年或更长的时间范围)内进行预测性资产健康分析。
随机模拟中使用的模型可以以这种方式建立,即只有两个或三个转移概率管控状态之间的转移,这可以指示健康资产状态、在其下资产仍然可操作的退化资产状态和在其下资产已经故障的故障资产状态。本发明也可以应用于很少或没有历史数据可用的情况。然后,马尔可夫链模型的转移概率可以由人类专家设定。
PF可以用于更新故障概率(probability of failure,PoF)、剩余使用寿命(remaining useful life,RUL)或关于资产的健康状态的其他预测。
对作为电力系统资产或工业资产的资产执行预测性健康分析的方法包括:确定资产的资产健康状态的未来演变,包括:迭代地重复执行随机模拟以获得资产健康状态的未来演变的预测,以及使用粒子滤波器(PF)基于传感器测量值来更新预测。该方法可以包括基于资产健康状态的所计算的未来演变生成输出。
该方法是计算机实施的方法。
更新步骤可以由传感器测量值的读数触发。
执行随机模拟可以包括并行运行多个模拟,以获得作为时间函数的资产健康状态的随机分布。
随机模拟可以使用具有离散状态空间的模型,特别是离散马尔可夫链模型。
马尔可夫链可能是齐次的。转移概率可以与时间无关。
马尔可夫链可以具有1阶,也就是说,转移可以取决于马尔可夫链模型当前所处的状态,同时独立于到这个状态的前面的转移。
马尔可夫链模型可以使得状态具有单调有序的定性解释,也就是说,总是可以在退化的严重度方面比较两种状态。
状态空间的每个状态可以具有到状态空间的至多一个其他状态的非零转移概率(这描述了更严重的退化)以及到其自身的非零转移概率。
马尔可夫链模型可以使得状态空间的不对应于资产的故障的状态具有到状态空间的仅仅一个其他状态的非零转移概率。
马尔可夫链模型可以使得状态空间的对应于资产的故障的状态不具有到除其自身之外的状态的任何非零转移概率。
马尔可夫链模型可以是有限马尔可夫链模型。
状态空间可以由n个状态组成,其中n等于3、4或大于4,其中对于状态空间的对应于操作性资产的n-1个状态,到状态空间的仅一个其他状态的转移概率是非零的,并且对于对应于故障资产的状态,不存在到状态空间的任何其他状态的非零转移概率。
随机模拟可以包括MCMC模拟。
离散状态空间可以由三个状态、四个状态或多于四个状态组成。
离散状态空间可以包括在其下资产的操作不会被故障不利地影响的至少一个状态。
离散状态空间可以包括在其下资产的操作被故障不利地影响但是资产继续操作的至少一个状态。
离散状态空间可以包括在其下资产由于故障而不操作的状态。
更新预测可以包括将传感器测量值映射到标量函数,其中标量函数的值的不同范围对应于离散状态空间的不同状态。
标量函数可以使用试探法来计算,该试探法使用传感器测量值作为输入并输出标量函数。
更新预测可以包括基于预测计算包括在传感器测量值中的能够观察的量的期望值。
更新预测可以包括执行期望值与包括在传感器测量值中的能够观察的量的比较。
更新预测可以包括基于比较为随机模拟的后续迭代计算经更新的初始状态。
更新预测可以取决于传感器测量值的不确定性。
期望值可以基于离散状态空间中的概率分布和状态相关的噪声参数来计算。
状态相关的噪声参数可以取决于用于计算期望值的噪声项的方差。
状态相关的噪声参数可能取决于高斯白噪声的状态相关的方差。
该方法还可以包括以循环方式并与随机模拟的整数个模拟步骤的完成同步地读取传感器测量值。也就是说,连续传感器测量值之间的间隔可以不同于随机模拟的预测周期的任何整数倍。
该方法还可以包括与随机模拟的任意整数个模拟步骤的完成异步地读取传感器测量值。也就是说,连续传感器测量值之间的间隔可以不同于随机模拟的预测周期的任何整数倍。
更新预测可能取决于调用PF时的预测中固有的不确定性。出于说明的目的,状态空间的所有状态上的分布可以被用作PF中的输入,并且可以被更新。PF的执行可以减少预测模拟中固有的不确定性。预测中固有的不确定性可以不同。
执行PF时的预测中固有的不确定性可以作为自上次执行PF后经过的间隔的函数变化。
该方法还可以包括根据随机模拟计算预测性资产健康状态演变的置信信息,并基于传感器测量值更新置信信息。
可以进一步基于置信信息生成输出。
置信信息可以包括置信区间在时间范围上的未来演变。
该方法还可以包括根据随机模拟计算预测性资产健康状态演变的方差信息,并基于传感器测量值更新方差信息。
还可以基于方差信息生成输出。
方差信息可以包括方差区间在时间范围上的未来演变。
置信或方差信息可以包括下边界的未来演变和上边界的未来演变。
更新置信或方差信息可以包括基于传感器测量值更新状态空间中的随机分布,并且使用状态空间中经更新的随机分布来重新计算传感器测量值的时间之后的时间的置信或方差信息。
更新置信或方差信息可以包括通过执行PF来减小上边界和下边界之间的差异。
执行随机模拟可以包括执行整数k个时间演变步骤。
PF可以接收在随机模拟的第k个时间演变步骤处获得的预测和传感器测量值作为输入。
PF可以可选地接收与传感器测量值相关联的不确定性作为输入。
PF可以基于在第k个时间演变步骤处获得的预测、基于传感器测量值、并且可选地基于与传感器测量值相关联的不确定性来计算更新的预测。
PF可以输出经更新的预测。经更新的预测可以是离散模型的状态空间中的经更新的分布。
经更新的预测可以用作随机模拟的下k个时间演变步骤的初始值。
输出可以包括资产健康状态的未来演变的表示。
替代性地或附加地,输出可以包括基于资产健康状态的未来演变而生成的警报或警告。
替代性地或附加地,输出可以包括用于基于资产健康状态的未来演变来控制资产的操作的控制信号。
随机模拟可以包括针对不同环境和/或操作场景的模拟。
随机模拟可以包括可以并行执行的多个模拟。
随机模拟可以包括可以并发地执行的多个模拟。
该方法可以由至少一个集成电路来执行。
该方法可以由分散式控制系统的中央控制器的至少一个集成电路来执行。
该方法可以由分散式控制系统的局部控制器的至少一个集成电路来执行。
该方法可以包括由至少一个集成电路通过通信网络接收关于随机模拟中使用的模型的转移概率的信息。
资产可以是电力变压器、分布式能源、DER、单元或发电机。
资产可以安装在电力系统或工业系统中。
电力系统或工业系统可以具有分散式控制系统,该分散式控制系统包括中央控制器和多个局部控制器,每个控制器与电力系统或工业系统的资产相关联。
该方法可以由分散式控制系统的局部控制器来执行。
一种操作和/或维护资产的方法包括:使用根据实施例的方法对资产执行预测性资产健康分析;并且基于预测性资产健康分析自动采取控制或输出动作。
控制或输出动作可以包括执行以下中的至少一项:基于资产健康状态的未来演变生成警报或警告;基于资产健康状态的未来演变生成用于控制资产的操作的控制信号;基于资产健康状态的所计算的未来演变来调度资产的停机时间;基于资产健康状态的所计算的未来演变来调度维护或检查作业;基于资产健康状态的所计算的未来演变来调度更换作业;基于资产健康状态的所计算的未来演变来改变维护或检查间隔。
控制或输出动作可以包括经由接口输出关于作为操作时间的函数的故障概率、关于所调度的或重新调度的维护作业间隔、或者关于所调度的更换作业间隔的信息。
一种可操作来对作为电力系统资产或工业资产的资产执行预测性健康分析的计算系统,包括至少一个集成电路,该至少一个集成电路可操作以通过迭代地重复随机模拟来计算资产的资产健康状态的未来演变,以获得资产健康状态的未来演变的预测;以及使用粒子滤波器(PF)基于传感器测量值来更新预测。该至少一个集成电路可操作来基于资产健康状态的未来演变控制输出的生成。
该计算系统可以包括局部控制器,该局部控制器具有一个或几个集成电路(IC),该一个或几个集成电路可操作来迭代地重复随机模拟,以获得资产健康状态的未来演变的预测,并基于使用PF的传感器测量值来更新预测。一个或多个集成电路(IC)可操作来执行本文详细描述的操作。
该计算系统可以包括中央控制器,该中央控制器具有一个或几个IC,该一个或几个IC可操作来迭代地重复随机模拟,以获得资产健康状态的未来演变的预测,并基于使用PF的传感器测量值来更新预测。一个或多个集成电路(IC)可操作来执行本文详细描述的操作。
计算系统可以操作以使得更新可以由传感器测量值的读取来触发。
计算系统可以操作以使得执行随机模拟可以包括并行运行多个模拟,以获得作为时间的函数的资产健康状态的随机分布。
计算系统可以操作以使得随机模拟使用具有离散状态空间的模型,特别是离散马尔可夫链模型。
计算系统可以操作以使得马尔可夫链可以是齐次的。转移概率可以与时间无关。
计算系统可以操作以使得马尔可夫链可以具有1阶,也就是说,转移可以取决于马尔可夫链模型当前所处的状态,同时独立于到这个状态的前面的转移。
计算系统可以操作,使得马尔可夫链模型可以使得状态具有单调有序的定性解释,也就是说,总是可以在退化的严重度方面比较两种状态。
计算系统可以操作以使得状态空间的每个状态可以具有到状态空间的至多一个其他状态的非零转移概率(其描述了更严重的退化)以及到其自身的非零转移概率。
计算系统可以操作以使得状态空间的不对应于资产的故障的状态具有到状态空间的仅仅一个其他状态的非零转移概率。
计算系统可以操作以使得状态空间的对应于资产的故障的状态不具有到除其自身之外的状态的任何非零转移概率。
计算系统可以操作以使得马尔可夫链模型可以是有限马尔可夫链模型。
计算系统可以操作以使得状态空间可以由n个状态组成,其中n等于3、4或大于4,其中对于状态空间的对应于操作性资产的n-1个状态,到状态空间的仅一个其他状态的转移概率是非零的,并且对于对应于故障资产的状态,不存在到状态空间的任何其他状态的非零转移概率。
计算系统可以操作以使得随机模拟可以包括MCMC模拟。
计算系统可以操作以使得离散状态空间可以由三个状态、四个状态或多于四个状态组成。
计算系统可以操作以使得离散状态空间可以包括在其下资产的操作不会被故障不利地影响的至少一个状态。
计算系统可以操作以使得离散状态空间可以包括在其下资产的操作被故障不利地影响但是资产继续操作的至少一个状态。
计算系统可以操作以使得离散状态空间可以包括在其下资产由于故障而不操作的状态。
计算系统可以操作以使得更新预测可以包括将传感器测量值映射到标量函数,其中标量函数的值的不同范围对应于离散状态空间的不同状态。
计算系统可以操作以使得标量函数可以使用试探法来计算,该试探法使用传感器测量值作为输入并输出标量函数。
计算系统可以操作以使得更新预测可以包括基于预测计算包括在传感器测量值中的能够观察的量的期望值。
计算系统可以操作以使得更新预测可以包括执行期望值与包括在传感器测量值中的能够观察的量的比较。
计算系统可以操作以使得更新预测可以包括基于比较为随机模拟的后续迭代计算经更新的初始状态。
计算系统可以操作以使得更新预测可以取决于传感器测量值的不确定性。
计算系统可以操作以使得期望值可以基于离散状态空间中的概率分布和状态相关噪声参数来计算。
计算系统可以操作以使得状态相关的噪声参数可以取决于用于计算期望值的噪声项的方差。
计算系统可以操作以使得状态相关的噪声参数可能取决于高斯白噪声的状态相关的方差。
计算系统可操作用于以循环方式并与随机模拟的整数个模拟步骤的完成同步地读取传感器测量值。也就是说,连续传感器测量值之间的间隔可以不同于随机模拟的预测周期的任何整数倍。
计算系统可操作用于与随机模拟的任意整数个模拟步骤的完成异步地读取传感器测量值。也就是说,连续传感器测量值之间的间隔可以不同于随机模拟的预测周期的任何整数倍。
计算系统可以操作以使得更新预测可能取决于调用PF时的预测中固有的不确定性。出于说明的目的,状态空间的所有状态上的分布可以被用作PF中的输入,并且可以被更新。PF的执行可以减少预测模拟中固有的不确定性。
计算系统可以操作以使得预测中固有的不确定性可以变化。
计算系统可以操作以使得执行PF时的预测中固有的不确定性可以作为自上次执行PF后经过的间隔的函数变化。
计算系统可操作用于根据随机模拟计算预测性资产健康状态演变的置信信息,并基于传感器测量值更新置信信息。
计算系统可以操作以使得可以进一步基于置信信息来生成输出。
计算系统可以操作以使得置信信息可以包括置信区间的未来演变。
计算系统可操作用于根据随机模拟计算预测性资产健康状态演变的方差信息,并基于传感器测量值更新方差信息。
计算系统可以操作以使得可以进一步基于方差信息来生成输出。
计算系统可以操作以使得方差信息可以包括方差区间在时间范围上的未来演变。
计算系统可以操作以使得置信或方差信息可以包括下边界的未来演变和上边界的未来演变。
计算系统可以操作以使得更新置信或方差信息可以包括基于传感器测量值更新状态空间中的随机分布,并且使用状态空间中经更新的随机分布来重新计算传感器测量值的时间之后的时间的置信或方差信息。
计算系统可以操作以使得更新置信或方差信息可以包括通过执行PF来减小上边界和下边界之间的差异。
计算系统可以操作以使得执行随机模拟可以包括执行整数k个时间演变步骤。
计算系统可以操作以使得PF可以接收在随机模拟的第k个时间演变步骤处获得的预测和传感器测量值作为输入。
计算系统可以操作以使得PF可以可选地接收与传感器测量值相关联的不确定性作为输入。
计算系统可以操作以使得PF可以基于在第k个时间演变步骤处获得的预测、基于传感器测量值、并且可选地基于与传感器测量值相关联的不确定性来计算更新的预测。
计算系统可以操作以使得预测因子可以输出经更新的预测。经更新的预测可以是离散模型的状态空间中的经更新的分布。
计算系统可以操作以使得经更新的预测可以用作随机模拟的下k个时间演变步骤的初始值。
计算系统可以操作以使得输出可以包括资产健康状态的未来演变的表示。
替代性地或附加地,计算系统可以操作以使得输出可以包括基于资产健康状态的未来演变而生成的警报或警告。
替代性地或附加地,计算系统可以操作以使得输出可以包括用于基于资产健康状态的未来演变来控制资产的操作的控制信号。
计算系统可以操作以使得随机模拟可以包括针对不同环境和/或操作场景的模拟。
计算系统可以操作以使得随机模拟可以包括可以并行执行的多个模拟。
计算系统可以操作以使得随机模拟可以包括可以并发地执行的多个模拟。
该计算系统可以具有用于通过通信网络接收关于随机模拟中使用的模型的转移概率的信息的接口。
资产可以是电力变压器、分布式能源、DER、单元或发电机。
根据实施例的电力系统或工业系统包括资产,并且根据实施例的计算系统对资产执行预测性资产健康分析。
计算系统可以是电力系统或工业系统的用于控制资产的局部控制器。
计算系统可以可操作用于操作和/或维护资产。
计算系统可以可操作以基于关于资产健康状态演变的预测来生成控制或输出动作。
计算系统可以操作以使得控制或输出动作可以包括执行以下中的至少一项:基于资产健康状态的未来演变生成警报或警告;基于资产健康状态的未来演变生成用于控制资产的操作的控制信号;基于资产健康状态的所计算的未来演变来调度资产的停机时间;基于资产健康状态的所计算的未来演变来调度维护或检查作业;基于资产健康状态的所计算的未来演变来调度更换作业;基于资产健康状态的所计算的未来演变来改变维护或检查间隔。
计算系统可以操作以使得控制或输出动作可以包括经由接口输出关于作为操作时间的函数的故障概率、关于所调度的或重新调度的维护作业间隔、或者关于所调度的更换作业间隔的信息。
各种效果和优点与本发明相关联。
本发明提供了粒子滤波器(PF)技术的新应用,其允许当新的测量变得可用于状态监控和故障预测时,自动更新资产健康预测。
根据本发明实施例的方法和系统提供了长期至短期预测,其中资产的预测时间范围可以很长(例如,1周或更长、1个月或更长、1年或更长、2年或更长、5年或更长、10年或更长、15年或更长、20年或更长、25年或更长、30年或更长),而资产健康状态的预测使用传感器测量值来间歇地更新。因此,实现了长期至短期预测。预测的更新可以以可变的间隔进行。连续更新之间的间隔可以由允许估计资产健康状态的新传感器测量值的可用性来确定。
即使当测量值受到可能由例如传感器质量缺陷和/或噪声引起的不确定性的影响时,也可以执行利用新的测量进行的预测的自动更新。
关于健康状态的信息可以从测量信号中获得,该测量信号与随机模拟中使用的模型不直接相关,但是可以映射到健康状态。关于资产健康的预测可以以这种方式来计算,即预测模拟中固有的不确定性和关于传感器的测量值的不确定性彼此平衡。
预测可以异步更新,例如利用事件驱动的数据协议更新。
附图说明
将参考附图中示出的优选示例性实施例更详细地解释本发明的主题,在附图中:
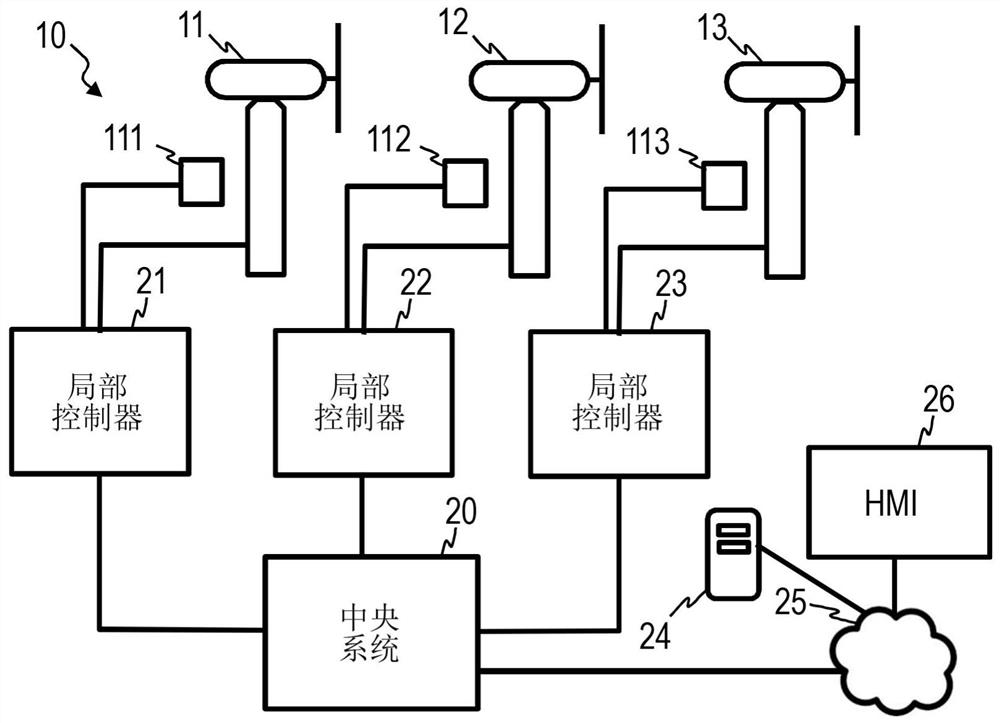
图1是根据实施例的具有计算系统的电力系统的示意图。
图2是根据实施例的具有计算系统的电力系统的示意图。
图3是根据实施例的方法的流程图。
图4是表示根据实施例的方法的操作的图。
图5是实施例中使用的马尔可夫链模型。
图6是示出由根据实施例的方法和计算系统生成的示例性输出的图表。
图7A、图7B和图7C是示出与观察到的资产健康状态相结合的预测性资产健康状态分析的结果的图表。
图8是根据实施例的方法的流程图。
图9是示出由根据实施例的方法和计算系统生成的示例性输出的图表。
图10是根据实施例的计算系统的框图。
图11是示出根据实施例的方法和计算系统中的处理的框图。
具体实施方式
将参照附图描述本发明的示例性实施例,在附图中相同或相似的附图标记表示相同或相似的元件。虽然一些实施例将在电力系统(诸如分布式能源(DER)单元或变压器)的资产的背景下描述,但是实施例不限于此。除非另外特别指出,实施例的特征可以彼此组合。
本发明的实施例通常使用粒子滤波器(PF)技术来更新通过基于传感器测量值的随机模拟获得的未来资产健康状态演变的预测。随机模拟可以包括对资产健康状态退化进行大量模拟,以获得资产健康状态的时间演变的随机分布。
隐层马尔可夫模型可以与随机模拟方法相结合,在随机模拟方法中,经由利用蒙特卡罗方法生成的随机轨迹的统计处理来估计系统的演变。由随机模拟方法确定的可观察状态的马尔可夫链演变可以与在将针对其确定资产健康预测的资产的操作期间捕获的传感器测量值相结合。
在隐层马尔可夫模型中可以使用马尔可夫链演变与关于不可直接观察到(隐层)的潜在故障的贝叶斯推理的组合。
下文将更详细描述的技术可以包括以下内容:
a)随机模拟的初始化。随机模拟可以是马尔可夫链蒙特卡罗(MCMC)技术。初始化可以取决于关于将针对其确定资产健康演变的资产的信息(例如,传感器数据)。
b)执行随机模拟以获得资产健康状态的演变的预测。这可能涉及循环通过MCMC的k个时间演变步骤。
c)使用PF技术基于传感器测量值更新预测。PF可以结合传感器测量值使用在读取传感器测量值之前的最晚时间的资产健康状态的预测,以确定经更新的预测。经更新的预测可以是马尔可夫模型的状态的经更新的概率分布。
d)经更新的预测被用作新的随机模拟的输入;可以迭代地重复步骤b和c,直到满足终止标准。
在执行基于传感器测量值的更新之前在步骤b中执行的时间演变步骤的数量可以在迭代之间变化。出于说明的目的,在事件驱动的实施方式中,传感器测量值的读取可以是事件驱动的。当新的传感器测量值可用时,可以执行预测的更新。预测的更新可以通过新的传感器测量值触发,该新的传感器测量值可以经由推或拉机制来读取。
图1和图2是电力系统10、电力系统15的示意图。电力系统10、电力系统15包括多个资产。资产可以包括发电机,诸如分布式能源(DER)单元11至13、诸如分布式能源16至18、变压器或其他电力系统资产。
电力系统10、电力系统15包括控制系统,该控制系统包括各自与资产相关联的局部控制器21至23。控制系统可以包括中央系统20。中央系统20可以与局部控制器通信地耦接。中央系统20可以与远程(例如,基于云的)服务器系统24通信地耦接。
如下文将更详细描述的那样,局部控制器21至23、中央系统20和/或远程服务器系统24可操作来使用基于马尔可夫链模型的随机模拟结合PF技术执行预测性资产健康分析。马尔可夫链模型可以具有特定的配置,如下面详细描述那样。局部控制器21至23、中央系统20和/或远程服务器系统24可操作以执行多个独立的随机模拟,特别是马尔可夫链蒙特卡罗(MCMC)模拟,以确定资产健康状态的演变的预测。资产健康状态的演变的预测是基于传感器测量值来更新的,该传感器测量值可以使用PF经由推或拉机制从(一个或多个)传感器111至传感器113读取。
由PF更新的预测性资产健康分析的结果可以由局部控制器21至23、中央系统20和/或远程服务器系统24用于调度停机时间、维护作业、更换作业或用于自动执行控制操作。局部控制器21至23、中央系统20和/或远程服务器系统24可以可操作以生成和输出控制或输出数据。输出可以经由人机界面(HMI)26提供。HMI可以经由互联网或另一广域网(widearea network,WAN)耦接到局部控制器21至23、中央系统20和/或远程服务器系统24。
如将参考图3至图11更详细地解释的那样,预测性资产健康分析可以包括模拟资产的时间演变和使用PF基于传感器测量值更新模拟。可以在局部控制器21至23处执行MCMC模拟、使用PF基于传感器测量值进行更新、以及对由PF更新的MCMC结果的进一步处理。这有助于结合局部传感器测量值用于更新预测性资产健康分析。
本文描述的技术可以在还没有传感器数据可用于资产的时候发起。出于说明的目的,即使还没有可用的传感器测量值,可以使用指示随机模拟中使用的状态模型的离散状态之间的转移概率针对资产计算剩余使用寿命(RUL)曲线或其他预测性资产健康预测,。转移概率可以由人类专家设定,或者可以从与正在对其执行预测性资产健康分析的资产相同或相似类型的资产上捕获的历史数据中导出。
应当理解的是,下面描述的技术可以针对电力系统或工业系统的几个不同资产11至13、16至18并行和并发地执行。
出于说明的目的,第一计算设备(例如,局部控制器21)可以执行随机模拟以获得第一资产11、16的资产健康状态的演变的预测,并且使用PF基于由用于第一资产11、16的一个或几个第一传感器111获得的传感器测量值来更新预测。
第二计算设备(例如,局部控制器22)可以执行随机模拟以获得第二资产12、17的资产健康状态的演变的预测,并且使用PF技术基于由用于第二资产12、17的一个或多个第二传感器112获得的传感器测量值来更新预测。
第三计算设备(例如,局部控制器23)可以执行随机模拟以获得第三资产13、18的资产健康状态的演变的预测,并且使用PF技术基于由用于第三资产13、18的一个或多个第三传感器113获得的传感器测量值来更新预测。
不同的随机模拟可以被不同地初始化,这取决于资产11至13、16至18的初始健康状态。初始化可以是概率性的。出于说明的目的,如果可用的信息不能确定资产是处于随机模拟中使用的状态空间的第一状态还是第二状态,同时具有处于这两种状态中的任何一个的相等机会,则系统可以利用贝叶斯先验分布来初始化,使得资产处于第一状态的概率等于50%,并且资产处于第二状态的概率等于50%。具有更多状态和不同概率的其他概率初始化也是可能的。
随机模拟中使用的状态空间的不同状态之间的转移概率对于各种资产11至13、16至18可以相同,或者可以彼此不同。出于说明的目的,如果第一资产11、16和第二资产12、17在不同的操作条件和/或环境条件下操作,则在仿真中使用的离散状态空间的状态之间的转移概率可能彼此不同。
随机模拟中使用的状态空间对于各种资产11至13、16至18可以是相同的。
更新各种资产的预测的间隔可能不同。出于说明的目的,用于更新第一资产11、16的预测的PF的连续执行之间的时间间隔可以不同于用于更新第二资产12、17的预测PF的连续执行之间的时间间隔和/或不同于用于更新第三资产13、18的预测的PF的连续执行之间的时间间隔。
图3是方法50的流程图。方法50可以由局部控制器21至23、中央系统20和/或远程服务器系统24中的一个或多个集成电路(IC)自动执行。
在步骤51,可以执行随机模拟步骤。随机模拟步骤可以包括使用状态空间的离散状态之间的转移概率来更新并行执行的许多模拟的状态。状态空间可以具有对应于资产的日益严重退化的有限数量的状态。随机模拟步骤可以包括在MCMC技术中并行执行的许多模拟中执行时间演变步骤。
在步骤52,确定传感器测量值是否可用。传感器测量值可以通过推或拉机制接收。可以使用基于事件的报告,在该报告中响应于触发事件读取传感器测量值。如果没有传感器测量值可用,则在步骤51执行下一模拟步骤。
在步骤53,如果传感器测量值可用,则PF被用于更新通过随机模拟获得的最近预测。这可以包括基于测量值更新在随机模拟中获得的随机分布和/或更新从中导出的量(诸如剩余使用寿命(RUL)、故障概率(PoF)等)。
迭代地重复步骤51至53。在使用PF更新之前执行的随机模拟步骤51的数量可以在一个迭代重复与下一迭代重复之间变化。
随机模拟可以提供资产处于状态空间的多个不同状态中的一个的随机分布。由PF基于传感器测量值更新的随机模拟可以用于导出指示资产健康状态的演变的标量函数。标量函数可以指示资产在未来某个时间处于临界故障状态的概率。标量函数可以是量化资产健康的退化的退化指数,退化指数可以根据资产处于状态空间的不同状态的概率来计算。标量函数或从中导出的信息可以通过HMI 26输出,或者可以用于自动控制操作。
图4示出了随机模拟和使用PF基于传感器测量值的更新的组合的操作。
随机模拟S在时间t
随后,重复该过程。使用经更新的预测初始化随机模拟S。经更新的预测取决于k步前预测x
迭代65中的预测步骤的数量k’可以不同于迭代61中的预测步骤的数量k。
PF是非参数贝叶斯滤波技术。PF可以基于蒙特卡罗重要性抽样方法,该方法可以应用于由隐马尔可夫模型(Hidden Markov Model,HMM)建模的过程。PF可以用于通过递归贝叶斯推理从可观察的测量估计系统的隐藏状态的后验分布。估计可以以元组的集{粒子:权重}(被称为样本)的形式获得,其表示近似隐藏HMM状态的真实后验分布的经验概率分布(直方图)。
在每个滤波步骤中,需要从所谓的重要性分布中获得多个样本,以预测动态系统的演变。当HMM系统的新的观测可用时,样本可以通过贝叶斯推理进行更新。PF是遵循预测更新范式的递归技术。通过计算粒子的加权平均值,从样本(元组的集{粒子:权重})中获得系统状态的点估计。
图5是可以在根据实施例的方法和计算系统中使用的马尔可夫链模型的图。马尔可夫链模型的状态空间由n个状态的S1、……、Sn的集合构成。在目前的情况下,n=4。然而,替代地可以使用具有不同数量状态(例如,n=3或n=5或n>5)的状态空间。
状态空间的状态可以以这样的方式排序,即从S1到S2,从S2到S3依此类推,资产健康的退化的严重程度增加。也就是说,除了马尔可夫链模型的最后一个状态之外,所有状态之后可以是表示更严重退化的另一状态。马尔可夫链模型的最后状态可以表示最严重的退化。
马尔可夫链模型可以以这样的方式建立,即第一个、第二个、……、第(n-1)个状态41至43具有到状态空间的仅一个其他状态的非零的转移概率p
出于说明的目的,马尔可夫链模型可以使得从第一状态41到第二状态42存在有限的转移概率p
马尔可夫链模型可以使得从第二状态42到第三状态43存在有限的转移概率p
马尔可夫链模型可以使得从第三状态43到第四状态44存在有限的转移概率p
马尔可夫链模型的最终状态44可以对应于其中资产已经失效到其不再可操作的程度的状态。
状态空间的其他状态41至43可以对应于不同程度的退化。
出于说明的目的,第一状态41(其也可以被称为“未知”状态S1)可以对应于其中不存在会影响资产操作的已知退化的资产状态。出于说明的目的,第一状态41可以对应于其中没有记录故障或者其中没有故障可以被记录的状态。
第二状态42(也可以被称为“起始”状态S2)可以对应于可检测的故障,该故障具有如此小严重性以至于它们不会立即影响资产的性能。这种起始故障通常以较短的平均维修时间(Mean Time to Repair,MTTR)、较低的维修成本和对整体性能的较小影响为特征。如果不适当地维护,起始故障可能演变为更严重退化的故障。
第三状态43(其也可称为“退化”状态S3)可以对应于描述显著降低系统的性能但不会导致立即资产关闭的故障的模式。通常这种故障是由部件退化引起的。如果使其不处理,退化最终将导致严重的故障。
第四状态44(其也可以称为“临界”状态S4)可以对应于导致资产的立即和完全关闭的最严重的故障模式。其通常以较长而昂贵(由于完全生产损失)的MTTR为特征。
马尔可夫链模型的转移概率可以经由用户界面从人类专家接收,或者可以使用历史数据来确定,如下文将描述那样。可以使用转移概率p
当初始化随机模拟以获得资产健康状态的演变的预测时,可以根据关于资产的信息可用来选择随机模拟的初始状态。如果没有关于资产的信息可用,模拟可以全部从第一状态41开始,在第一状态下没有关于可检测故障的信息。如果关于资产的信息(例如安装后收集的传感器数据)可用,这个传感器数据可以用于初始化模拟。可以根据已经收集的传感器数据是否指示不存在影响资产性能的可识别故障或者是否存在影响资产性能的可检测问题来选择各种MCMC或其他随机模拟的初始状态的分布。
另外,如上已经解释那样,初始化可以是概率性的。
图6是可以被自动生成和输出的输出71的示意图。输出71可以指示基于传感器测量值使用PF更新的马尔可夫链模型已经演变成对应于不工作资产的临界状态的概率。输出71可以通过计算马尔可夫链模型处于状态空间的临界状态S4的模拟的分数来确定。
可以生成附加的或替代性的输出。出于说明的目的,可以处理RUL曲线或指示资产的退化的其他信息,以自动调度检查、维护或更换作业,从而向操作员输出计划信息和/或自动调度停机时间。
替代性地或附加地,可以使用阈值比较或其他触发来处理RUL曲线或指示资产的退化的其他信息,以确定是否以及何时将向操作员输出警报、警告或其他信号。
如图6所示,通过PF基于传感器测量值的更新可能导致MCMC、RUL曲线、PoF曲线或指示资产健康状态的演变的其他信息的概率分布的跳跃。
虽然随机模拟(例如MCMC)可以提供了相同类型的资产的较大集合中的资产健康状态的退化的良好画面,但随机模拟与PF组合以更新预测允许以特定资产的方式改进预测性资产健康分析。
图7A、图7B和图7C示出了资产健康状态的时间演变。
在图7A、图7B和图7C中,示出了表示退化的标量函数d(t)。标量函数d(t)取决于如通过由PF更新的随机模拟确定的马尔可夫链模型处于相应的第1个、第2个、……、第n个状态的所有概率p
出于说明的目的,对于任何时间j,可以计算标量函数
d(j)=Σ
其中p
通过输出函数d(j)或从其导出的信息,即使还没有导致资产达到临界状态S4,也可以更充分地反映导致减小的RUL的退化。
函数d(j)指示退化,并且可以通过h(j)=1–d(j)与健康指数h(j)相关联,此时d(j)被限制为取0到1之间的值。
图7A、图7B和图7C示出了由d(t)测量的资产健康状态的时间演变。曲线81对应于根据发明人通过将随机模拟与使用PF的基于传感器读数的更新组合而确定的时间演变。曲线82对应于相应资产的实时演变。曲线82通过将多个传感器测量值处理成退化函数82而获得。曲线83对应于由没有使用PF的任何基于传感器读数的更新的随机模拟确定的时间演变。
在图7A、图7B和图7C中,用于确定曲线82的数据是针对比平均值退化慢得多的资产捕获的。因此,通过没有使用PF的任何基于传感器读数的更新的随机模拟获得的曲线83与表示真实退化的曲线82之间存在显著差异。
通过将使用PF的传感器测量值结合到预测中,所得曲线81更接近地模仿了资产健康状态的真实演变。
当随机模拟基于具有离散状态空间的模型时,将传感器测量值与随机模拟相结合以获得经更新的预测可以包括在连续可观测值或由此导出的退化指数d(t)与状态空间的离散状态之间的转变。这可以以各种方式来完成。出于说明的目的,退化指数d(t)或健康指数h(t)=1-d(t)可以在传感器测量值可用时基于传感器测量值来计算。从传感器测量值计算的退化指数d(t)或健康指数h(t)=1-d(t)可以与几个阈值TH
可以使用关于传感器测量值的附加信息。出于说明的目的,传感器测量值可能与不确定性有关。不确定性可能由传感器质量缺陷和/或噪声引起。可以通过PF考虑这个信息。出于说明的目的,PF可以使用量化测量数据中的噪声的参数的集合,但不限于此。参数可以取决于状态模型的各种状态并且对于状态模型的各种状态是不同的。这些参数可以基于例如历史传感器数据预先确定,并且可以在PF的寿命操作期间使用。
图8是方法90的流程图。方法90可以由局部控制器21至23、中央系统20和/或远程服务器系统24中的一个或多个集成电路(IC)自动执行。
在步骤91,可以执行与测量数据相关联的不确定性量化。这可以在使用PF更新资产健康状态的演变的预测之前的训练阶段完成。
在步骤92,可以执行随机模拟,其中使用PF基于传感器测量值来更新资产健康状态的演变的预测。
在步骤93,可以输出基于使用PF更新的演变的预测确定的预测输出,例如,RUL或PoF曲线、警报、警告或控制信号。
出于说明的目的而非限制,能够观察的量y的期望值可以与通过以下的模拟中使用的离散状态空间的状态相关:
E(y)=Σ
其中o(i)可以具有连续值,i是表示离散状态模型的状态的从1、……、n的整数,以及N是具有标准偏差σ
在步骤91处的训练期间,可以为离散状态空间的全部状态计算标准偏差σ
出于说明的目的,可以基于训练数据来计算标准偏差σ
||y(t)–E(y(t))|| (3)
被最小化或小于阈值。在等式(3)中,||·||表示在不同时间内针对能够观察的量可从测量数据获得的相应预测状态计算的范数,诸如L1范数、L2范数或其他范数。
为了使根据等式(3)的标准偏差σ
所确定的标准偏差σ
通过执行诸如MCMC的随机模拟并基于传感器测量值使用PF来更新随机模拟,不仅可以自动确定和输出资产的健康状态的演变,而且可以自动确定和输出与所确定的演变相关联的可靠性。
关于可靠性的信息可以采取各种形式。出于说明的目的,曲线71、81周围的置信区间的演变可以被确定为预测时间范围上的时间的函数。置信区间的时间演变可以指示临界故障概率71、退化指数d或健康指数h的下边界和上边界。上边界和下边界可以被确定为使得由PF更新的随机模拟的至少某个百分比(例如,至少70%、80%、90%或95%)在上边界和下边界之间的范围内产生临界故障概率71、退化指数d或健康指数h。图9中示出了指示置信区间的时间演变的示例性上边界72和下边界73。
替代性地或附加地,上边界72和下边界73可以反映资产可能经受的操作和/或环境条件方面的变化。出于说明的目的,曲线71、72、73可以各自通过使用参考图5解释的马尔可夫链模型执行多个随机模拟来获得,但是具有不同的转移概率集合。
随机模型的转移概率可以以各种方式确定。出于说明的目的,转移概率可以由人类专家设定,或者可以从历史传感器数据中导出。
历史传感器数据可以是针对与要对其执行预测性资产健康分析的一个或多个资产相同资产类型的资产(例如,具有一定额定功率范围的光伏面板;具有一定额定功率范围的风力涡轮发电机;某一时间间隔内的额定变压器)获得的数据。
历史传感器数据可以被标记为包括关于状态(例如关于状态S1至Sn)的信息的传感器数据。出于说明的目的,对于传感器数据的任何集合,可能存在将传感器数据与马尔可夫链模型的状态S1、……、Sn关联。如果传感器数据不包括故障特征,则可以接收来自人类专家的信息,从而将传感器数据分配给马尔可夫链模型的状态S1、……、Sn。替代性地或附加地,可以从传感器数据计算标量函数,其表示群中的相应资产的退化或健康指数。标量函数可以针对一个或几个阈值进行计算,以基于历史传感器数据确定已经发生S1、……、Sn之间的转移的时间。
标量函数可以使用试探法从传感器测量值中计算。
标量函数可以将在不同时间捕获的传感器测量值作为输入,并且可以将它们处理成标量函数,该标量函数表示由健康指数h或退化指数d反映的资产健康的观察到的演变。
可以使用各种技术来计算标量函数,该标量函数用于标识离散状态之间的转移。出于说明的目的,可以将传感器测量值与一系列操作值进行比较。对于范围之外的每个传感器测量值,可以施加处罚。可以使用加权求和或组合传感器测量值的加权因子和取决于传感器测量值与正常操作值范围的偏差的值的乘积的其他处理。加权因子取决于相应的传感器,并且指示测量对资产健康的重要性。
将传感器测量值的映射提供到各种资产(包括但不限于断路器、电池(诸如Li离子电池)或变压器)的连续健康或退化函数中的工具是已知的。为便于说明,诸如椭圆APM或RelCare工具的工具处理传感器测量值,以提供具有连续范围内的值并指示资产健康的函数。归一化可用于将健康或退化函数归一化到期望的范围(诸如从0到1)。
本文公开的技术允许使用可选的标准化和阈值比较将任何健康或退化函数映射到状态模型的离散状态。
马尔可夫链模型的转移概率可以根据传感器数据和相关联的状态标签自动确定。
在示例性实施方式中,转移概率可以基于条件概率来确定。出于说明的目的,从第i个状态到第(i+1)个状态(其中1≤i≤n-1)的转移在时间j的转移概率可以被确定为
p
在等式(4)中,分子表示在时间j处于第i个状态并且在时间j+1转移到第(i+1)个状态的资产的数量。分母表示在时间j处于第i个状态的资产的数量。
可以基于用户输入来设置和/或调节转移概率。可以执行平均或其他处理来获得齐次马尔可夫链模型的概率。
当传感器数据可用于具有相同资产类型但是经受不同的操作条件和/或环境条件的不同群组的资产时(例如,具有一定额定功率范围的光伏面板;具有一定额定功率范围的风力涡轮发电机;一定间隔内的额定变压器),可以为群组中的每一个独立地确定转移概率。
转移概率随后可以用于随机模拟,该随机模拟与PF组合用于更新所获得的预测。
由PF基于传感器测量值更新的所获得的预测可以是用于确定RUL曲线、PoF曲线或用于一个或几个资产的时间相关退化的另一指标的过程。
控制和/或输出操作可以基于由PF更新的、资产健康状态的演变的预测的结果来自动执行。
出于说明的目的,可以输出RUL曲线。可以并发地输出关于置信区间或方差的时间演变的信息。
替代性地或附加地,资产的操作点可以由与资产相关联的局部控制器21至23自动调节。
替代性地或附加地,可以自动调度检查、维护和/或更换作业。
替代性地或附加地,可以自动调度用于检查、维护和/或更换作业的停机时间。
替代性地或附加地,根据RUL曲线或其他预测性资产健康状态演变,可以生成警报、警告或其他输出,以便经由HMI输出。。
图10是计算系统100的示意图。计算系统100可以包括一个或几个IC 103。一个或多个IC可以包括专用集成电路(ASIC)、处理器、控制器、现场可编程门阵列(FGPA)或多个这种集成电路的组合。
一个或多个IC 103可以驻留在中央系统20、局部控制器21至23之一、服务器系统24中,或者可以分布在这些实体上。
一个或多个IC 103可操作以执行随机模拟引擎104,以模拟马尔可夫链模型的时间相关演变。随机模拟引擎104可以适于执行MCMC模拟。
由随机模拟引擎104使用的马尔可夫链模型的转移概率可以通过接口101接收(例如,当一个或多个IC 103驻留在局部控制器21至23之一中并且中央系统20计算转移概率时)。转移概率可以由一个或多个IC 103基于具有与要对其执行预测性资产健康分析的资产相同的资产类型的资产群的历史传感器数据来计算。历史传感器数据可以经由接口101接收,或者可以本地存储在数据存储设备102中。
一个或多个IC 103可以可操作以执行PF更新引擎105,以基于传感器测量值来更新由随机模拟引擎104获得的预测。传感器测量值可以在接口101处从传感器110、网关(GW)设备或诸如合并单元(merging unit,MU)的另一实体接收。
一个或多个IC 103可以可操作以执行预测引擎106。预测引擎106可以基于由随机模拟引擎104执行的模拟的、由预测因子更新引擎105更新的结果来计算RUL曲线、PoF曲线或与资产健康状态演变相关联的其他预测信息。
一个或多个IC 103可以可操作以执行输出引擎107。输出引擎107可以生成输出数据或输出信号,用于控制HMI和/或实施对资产或在其中使用资产的系统的控制操作。出于说明的目的,输出引擎107可以可操作以生成数据并将其输出到HMI,使得输出RUL曲线或PoF曲线。输出引擎107可以可操作以生成数据并将其输出到HMI,使得可以并发地输出关于置信区间或方差的时间演变的信息。
替代性地或附加地,输出引擎107可以可操作以响应于由随机模拟引擎104执行的模拟的、由PF更新引擎105更新的结果自动调整资产的操作点。
替代性地或附加地,输出引擎107可以可操作以自动生成和输出关于检查、维护和/或更换作业的信息。
替代性地或附加地,输出引擎107可以可操作以自动生成和输出关于可以自动调度用于检查、维护和/或更换作业的停机时间的信息。
替代性地或附加地,输出引擎107可以可操作以根据RUL曲线或其他预测性资产健康状态演变自动生成和输出警报、警告或其他输出,以便通过HMI输出。
图11是示出根据实施例的方法和计算系统的操作的示意框图。从时间t
当传感器测量值121在时间t
各种效果和优点与本发明相关联。本发明提供了粒子滤波器(PF)技术的新应用,其允许当新的测量变得可用于状态监控和故障预测时,自动更新资产健康预测。由此可以获得资产健康状态的长期至短期预测。预测的更新可以以可变的间隔进行。即使当测量值受到可能由例如传感器质量缺陷和/或噪声引起的不确定性的影响时,也可以执行利用新的测量进行的预测的自动更新。
根据本发明的方法和系统可以结合电力系统资产(诸如发电、配电和/或传输系统的资产,或者工业系统的资产,但不限于此)使用。
虽然已经在附图和前面的描述中详细描述了本发明,但是这种描述被认为是说明性的或示例性的,并且不是限制性的。根据对附图、公开内容和所附权利要求的研究,本领域中的和实践所要求保护的发明的技术人员人可以理解和实现所公开的实施例的变化。在权利要求中,词语“包含”不排除其它元件或步骤,并且不定冠词“一”或“一个”不排除多个。在不同的权利要求中引用某些元素或步骤的单纯事实并不指示这些元素或步骤的组合不能被有利地利用,具体地说除了实际的权利要求依赖性之外,任何另外的有意义的权利要求组合应被认为是公开的。