一种用于脑卒中患者照护的伸展辅助训练设备
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及医用康复设备技术领域,特别涉及一种用于脑卒中患者照护的伸展辅助训练设备。
背景技术
脑卒中患者中出现偏瘫主要为颅脑内发生损伤以后,引起身体一侧活动不灵活或者根本无法活动。通常情况下该类患者发生偏瘫以后,易导致上身屈曲、下肢伸直,需在恢复期卧床治疗,该类脑卒中偏瘫患者静养恢复后,由于其腰腹核心肌群因卧床肌肉肌力下降,需要进行伸展训练达到快速恢复腰腹可信肌群肌力的效果。而现有康复手段主要是人工扶持提供患者借力点后,通过照护人员手部托举背后辅助引导患者完成整个动作形态。该种手段由于给于患者辅助力时是依靠看护人员自身的主观判断,在患者腰腹肌群肌力不足时,动作完成过程辅助的提供力施加,不便于依据患者自身感知的肌力水平进行增减,因此造成训练获得的恢复完成度效果不够理想。为此,我们提出一种用于脑卒中患者照护的伸展辅助训练设备。
发明内容
本发明的主要目的在于提供一种用于脑卒中患者照护的伸展辅助训练设备。
为实现上述目的,本发明采取的技术方案为:
一种用于脑卒中患者照护的伸展辅助训练设备,包括训练机组,所述训练机组中安装有腰肢引导组件和高点抬升支架,所述高点抬升支架的一侧安装有借力点延伸调控组件和借力握持组件,所述借力点延伸调控组件用于依据当前腰腹伸展所需完成高度调整所述借力握持组件间距,所述借力点延伸调控组件与所述借力握持组件之间设有辅助力需求测得模块,所述辅助力需求测得模块用于获得所述借力握持组件借力伸展辅助时的受力状态,进而调控所述腰肢引导组件辅助强度,所述借力握持组件包括牵引感应连接件和牵引握持支具,所述牵引握持支具与所述牵引感应连接件固定连接,所述辅助力需求测得模块包括拉伸助力传感单元、握持接触面传感单元、握持抓力传感单元和获得数据处理单元,所述拉伸助力传感单元设置于所述牵引感应连接件的伸缩端,用于感应所述牵引感应连接件受拉力时的伸缩状态,所述握持接触面传感单元和握持抓力传感单元均设置于所述牵引握持支具位置,且所述握持接触面传感单元和握持抓力传感单元用于感应所述牵引感应连接件受拉力时的握力接触面,进而获得借力完成的伸展动作行程。
本发明进一步的改进在于,所述训练机组包括训练区间隔板、引导点连接件和下肢摆布件,所述引导点连接件与所述训练区间隔板固定连接,所述引导点连接件用于依据所述辅助力需求测得模块获得数据调整所述腰肢引导组件支撑后的腰腹伸展支撑行程,所述下肢摆布件呈对称排布于所述训练区间隔板的上端。
本发明进一步的改进在于,所述腰肢引导组件包括力距点倚靠支撑件、颈部支撑件、力距点驱动件,所述颈部支撑件与所述力距点倚靠支撑件之间固定连接,所述力距点倚靠支撑件与所述训练区间隔板转动安装,所述力距点驱动件与所述力距点倚靠支撑件的底壁转动连接,所述力距点倚靠支撑件表面设有背靠接触缓冲件。
本发明进一步的改进在于,所述借力点延伸调控组件包括限距引导支座和调距驱控滑动件,所述调距驱控滑动件设置于所述限距引导支座的内侧,所述调距驱控滑动件固定连接有中置调距连接件,所述中置调距连接件与所述牵引感应连接件一端固定连接。
本发明进一步的改进在于,所述高点抬升支架固定连接于所述训练区间隔板的外壁,所述限距引导支座固定连接于所述高点抬升支架的顶部。
本发明进一步的改进在于,一种用于脑卒中患者照护的伸展辅助训练设备的使用步骤,包括以下步骤:
步骤S1、脑卒中患者于训练机组位置进行伸展运动时,上身部分支撑于腰肢引导组件位置,使腰腹位于引导点连接件与力距点倚靠支撑件交接处,之后经看护人员引导,将患者腿部置入下肢摆布件位置,完成训练前的肢体位置摆放引导;
步骤S2、完成伸展训练前肢体位置摆放引导后,患者经手部握持牵引握持支具区间部分,即开始通过腰腹力完成体前倾伸展动作,随腰腹肌群力进行前倾伸展动作时;
步骤S3、通过辅助力需求测得模块回馈前倾动作过程中患者手部握持牵引握持支具时的握持面、抓力以及握持后产生拉伸力,经获得数据处理单元分析后获得其需求借力强度信号,判别当前患者动作引导完成度,进而向腰肢引导组件发送控制信号辅助患者逐级上体抬升,减少腰腹伸展时所需力度,完成腰腹伸展训练辅助。
与现有技术相比,本发明在完成伸展训练前对肢体位置摆放引导后,通过辅助力需求测得模块回馈前倾动作过程中,患者手部握持牵引握持支具时的握持面、抓力以及握持后产生拉伸力,进而将该数据经获得数据处理单元分析后,分析其需求借力强度信号判别当前患者动作引导完成度,进而通过控制腰肢引导组件收到控制信号辅助患者逐级上体抬升,进而根据自身完成训练动作时所需的借力程度,通过腰肢引导组件完成对腰腹训练前倾时的动作辅助,保持脑卒中患者恢复完成度效果的理想性。
附图说明
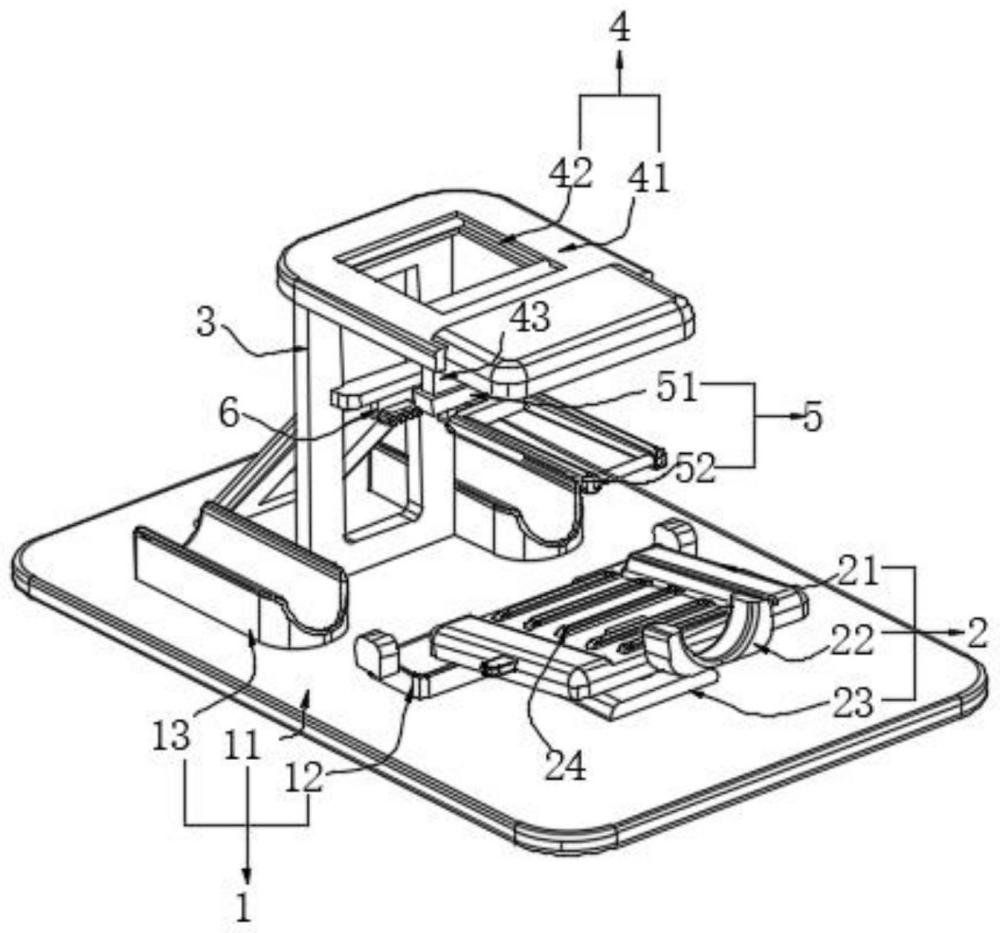
图1为本发明一种用于脑卒中患者照护的伸展辅助训练设备的轴测图。
图2为本发明一种用于脑卒中患者照护的伸展辅助训练设备的组成图。
图3为本发明一种用于脑卒中患者照护的伸展辅助训练设备中辅助力需求测得模块的结构示意图。
图中:1、训练机组;11、训练区间隔板;12、引导点连接件;13、下肢摆布件;2、腰肢引导组件;21、力距点倚靠支撑件;22、颈部支撑件;23、力距点驱动件;24、背靠接触缓冲件;3、高点抬升支架;4、借力点延伸调控组件;41、限距引导支座;42、调距驱控滑动件;43、中置调距连接件;5、借力握持组件;51、牵引感应连接件;52、牵引握持支具;6、辅助力需求测得模块;61、拉伸助力传感单元;62、握持接触面传感单元;63、握持抓力传感单元;64、获得数据处理单元。
具体实施方式
下面结合具体实施方式对本发明作进一步的说明,其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制,为了更好地说明本发明的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸,对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的,基于本发明中的具体实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他具体实施方式,都属于本发明保护的范围。
实施例
请参阅图1-图3,一种用于脑卒中患者照护的伸展辅助训练设备,包括训练机组1,训练机组1中安装有腰肢引导组件2和高点抬升支架3,高点抬升支架3的一侧安装有借力点延伸调控组件4和借力握持组件5,借力点延伸调控组件4用于依据当前腰腹伸展所需完成高度调整借力握持组件5间距。借力点延伸调控组件4与借力握持组件5之间设有辅助力需求测得模块6,辅助力需求测得模块6用于获得借力握持组件5借力伸展辅助时的受力状态,进而调控腰肢引导组件2辅助强度。借力握持组件5包括牵引感应连接件51和牵引握持支具52,牵引握持支具52与牵引感应连接件51固定连接。辅助力需求测得模块6包括拉伸助力传感单元61、握持接触面传感单元62、握持抓力传感单元63和获得数据处理单元64(在本实施例中,可采用型号为AT89C51的单片机作为数据处理器)。拉伸助力传感单元61设置于牵引感应连接件51的伸缩端,用于感应牵引感应连接件51受拉力时的伸缩状态,握持接触面传感单元62和握持抓力传感单元63均设置于牵引握持支具52位置,且握持接触面传感单元62和握持抓力传感单元63用于感应牵引感应连接件51受拉力时的握力接触面,进而获得借力完成的伸展动作行程。
在本实施例中,为解决现有脑卒中患者偏瘫恢复期中,通过照护人员自主判断引导患者完成整伸展动作形态时,不便于依据患者自身感知的肌力水平进行增减,因此影响到训练效果的达成度。本发明通过患者进行动作借力时的形态使患者依据自身需求自主完成动作时的辅助支撑;
本发明具体的使用方法如下,首先引导脑卒中患者到达训练机组1位置,使患者上身置于腰肢引导组件2位置,其中患者头部置入颈部支撑件22内侧保持直视状态,而背部则依靠力距点倚靠支撑件21部分,同时患者腰腹位于引导点连接件12与力距点倚靠支撑件21交接处之间,进而通过颈部支撑件22完成对脑卒中恢复患者训练前的支撑。之后看护人员引导患者将双腿分别置入两个下肢摆布件13位置,达成对训练动作前肢体位置的摆放引导,完成上述训练动作前的肢体位置摆放后,操作人员患者手部抬起,手部通过握持牵引握持支具52区间部分完成支撑。之后即可开始完成体前倾伸展动作,对腰腹肌群进行训练;
在动作初期开始时,操作人员仅通过牵引握持支具52作为手部前倾时的搭握点,此时牵引握持支具52受到患者手部前倾时的接触,仅触发握持接触面传感单元62的传感信号,而拉伸助力传感单元61和握持抓力传感单元63处于非触发状态,使腰肢引导组件2处于非辅助状态。此时完成身体前倾伸展动作时的所用肌力完全依靠患者自身的腰腹肌力,而训练过程中,患者仅凭自身腰腹力量无法完成前倾伸展时,只需手部自主通过抓握牵引握持支具52并拉动牵引握持支具52完成借力动作。患者将牵引握持支具52抓握产生借力动作时,通过握持接触面传感单元62和握持抓力传感单元63将当前借力时对牵引握持支具52产生的抓握力及拉力感应,经上传至获得数据处理单元64后。获得数据处理单元64在患者借力动作产生后经握持接触面传感单元62和握持抓力传感单元63感应时,向腰肢引导组件2中的力距点驱动件23发送辅助信号,使力距点驱动件23经驱动力距点倚靠支撑件21顶升后,调整力距点倚靠支撑件21的倾斜度,进而拉近牵引握持支具52与患者的握持间距。同时增加患者背部的支撑抬升,使患者减少前倾时所需力度,进而依据患者自身身感知的肌力水平不足时,通过患者动作进行动作成形的辅助;
在本实施例中,位于中置调距连接件43和牵引握持支具52之间的牵引感应连接件51分为双节伸缩设置,其中牵引感应连接件51的固定座端与牵引握持支具52之间呈固定连接安装,而牵引感应连接件51的伸展端则与中置调距连接件43之间固定。而拉伸助力传感单元61设置于牵引感应连接件51的伸展端与固定座端之间,进而在牵引感应连接件51的伸展端受患者拉拽牵引握持支具52时的产生力经固定座端内侧向外扩张时,通过拉伸助力传感单元61反馈牵引握持支具52的当前受拉力数据。进而通过获得数据处理单元64在拉力数据超出其内录入的数据阈值后,向力距点驱动件23发送顶升控制信号,直至患者继续完成动作无需借力而停止将牵引握持支具52的拉拽时,控制力距点驱动件23锁止,即停控力距点倚靠支撑件21的动作辅助,使患者继续依靠自身肌力继续完成借力后未完成的拉伸动作范围。
其中,训练机组1包括训练区间隔板11、引导点连接件12和下肢摆布件13,引导点连接件12与训练区间隔板11固定连接,引导点连接件12用于依据辅助力需求测得模块6获得数据调整腰肢引导组件2支撑后的腰腹伸展支撑行程,下肢摆布件13呈对称排布于训练区间隔板11的上端。腰肢引导组件2包括力距点倚靠支撑件21、颈部支撑件22、力距点驱动件23,颈部支撑件22与力距点倚靠支撑件21之间固定连接,力距点倚靠支撑件21与训练区间隔板11转动安装,力距点驱动件23与力距点倚靠支撑件21的底壁转动连接,力距点倚靠支撑件21表面设有背靠接触缓冲件24;训练区间隔板11作为训练时的排布区,且训练区间隔板11表面通过粘贴缓冲垫,用于保持训练时皮表接触时的舒适度,力距点倚靠支撑件21通过与引导点连接件12之间完成铰接活动,使患者背部置于力距点倚靠支撑件21位置时通过背靠接触缓冲件24对背部做出接触缓冲,同时腰腹位于力距点倚靠支撑件21和引导点连接件12交接处位置,进而在下肢摆布件13对患者腿部支撑后,起到患者伸展动作前的姿势支撑。
其中,借力点延伸调控组件4包括限距引导支座41和调距驱控滑动件42,调距驱控滑动件42设置于限距引导支座41的内侧,调距驱控滑动件42固定连接有中置调距连接件43,中置调距连接件43与牵引感应连接件51一端固定连接,高点抬升支架3固定连接于训练区间隔板11的外壁,限距引导支座41固定连接于高点抬升支架3的顶部;在本实施例中,患者可依据自身借力时的握持间距,通过调距驱控滑动件42驱动中置调距连接件43沿限距引导支座41内侧完成滑动调控,使中置调距连接件43底侧牵引感应连接件51随调距驱控滑动件42驱动调控后,改变牵引握持支具52与患者手部区间距离,进而达到伸展训练前依据患者所需借力完成动作训练时,握持间距的适应性调节。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。