一种外骨骼机器人膝关节离合器
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及外骨骼机器人技术领域,具体涉及一种用于外骨骼机器人的膝关节离合器。
背景技术
目前市面上的外骨骼机器人,在膝关节处都是依赖多个旋转电机工作,或采用屈伸电机与旋转电机配合工作,从而达到外骨骼机器人的膝关节能与人体膝关节动作相近的目的。
这样的结构虽然也能很好地模仿人的膝关节工作,但是,控制复杂,控制精度存在着累计误差,而且耗能高,同等容量的电池续航能力差。
发明内容
针对现有技术的不足,本发明旨在提供一种外骨骼机器人膝关节离合器。
为了实现上述目的,本发明采用如下技术方案:
一种外骨骼机器人膝关节离合器,包括牙嵌离合器从动体、凸轮随动器、牙嵌离合器主动体和传动轮;
牙嵌离合器主动体和传动轮之间同轴传动连接,牙嵌离合器主动体和牙嵌离合器从动体相对的端面分别设有相匹配的牙结构;所述传动轮传动连接于步进电机;
所述牙嵌离合器主动体呈圆柱凸轮结构,其侧表面设有曲线沟槽,牙嵌离合器主动体和凸轮随动器同轴套接并可相对凸轮随动器转动,凸轮随动器上的凸柱和牙嵌离合器主动体的曲线沟槽相配合;牙嵌离合器主动体转动时,凸轮随动器的凸柱可通过沿牙嵌离合器主动体的曲线沟槽移动推动牙嵌离合器主动体沿凸轮随动器轴向移动,从而使牙嵌离合器主动体和牙嵌离合器从动体的牙结构分离或咬合。
进一步地,所述牙嵌离合器从动体和凸轮随动器均与外骨骼机器人的小腿结构的上端固定连接;外骨骼机器人的小腿结构的上端和外骨骼机器人的大腿结构的下端可转动连接,外骨骼机器人的大腿结构的上端传动连接于所述步进电机。
进一步地,所述步进电机同轴传动连接有主动轮,主动轮传动轮通过传动带传动连接。
本发明还提供一种上述外骨骼机器人膝关节离合器的工作方法,具体过程为:
当外骨骼机器人一侧的腿结构需要向前迈步时,步进电机正转,从而驱动大腿结构和小腿结构整体向前运动,同时步进电机驱动传动轮正转,从而带动牙嵌离合器主动体正转,此时如果小腿结构与大腿结构不在一条直线上,牙嵌离合器主动体和牙嵌离合器从动体处于咬合状态,牙嵌离合器主动体会带动牙嵌离合器从动体正转,从而带动小腿结构还相对于大腿结构向前运动;牙嵌离合器主动体转动的过程中,由于凸轮随动器是固定的,因此凸轮随动器的凸柱在曲线沟槽内的相对移动会推动牙嵌离合器主动体轴向移动,逐渐与牙嵌离合器从动体分离;当小腿结构向前运动至和大腿结构成直线,脚足跟落地,此时牙嵌离合器主动体恰好与牙嵌离合器从动体彻底分离,小腿失去动力不再向前运动;此时,外骨骼机器人另一侧的腿结构开始向前迈步;
此时,外骨骼机器人一侧的腿结构所对应的步进电机反转,小腿结构和大腿结构开始整体向后运动,同时步进电机通过传动轮带动牙嵌离合器主动体反转并反向轴向移动,直至牙嵌离合器主动体和牙嵌离合器从动体的牙结构重新咬合,此时小腿结构也开始相对于大腿结构向后运动,待运动到脚后跟离地时,该一侧的腿结构完成一次步态周期。
本发明的有益效果在于:本发明的外骨骼机器人膝关节离合器通过牙嵌离合器与圆柱凸轮的有机结合,可以使得外骨骼机器人的运动轨迹更符合人体的步态运动,使得使用者更舒适。同时由于使用的步进电机功率小,而且每侧的腿结构只要一个步进电机,这样就更加节约电量,使得同等容量的电池续航能力翻倍,且控制更简单。
附图说明
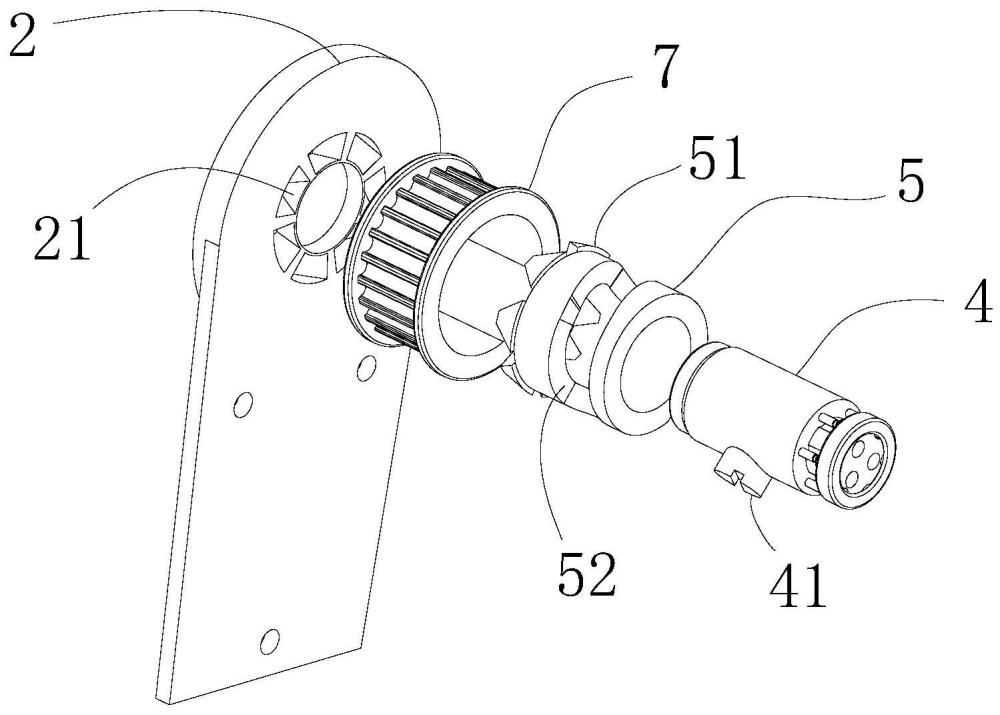
图1为本发明实施例1中外骨骼机器人膝关节离合器的分解示意图;
图2为本发明实施例1中牙嵌离合器从动体、凸轮随动器和牙嵌离合器主动体的结合示意图;
图3为本发明实施例1中凸轮随动器和牙嵌离合器主动体的结合示意图;
图4为本发明实施例1中牙嵌离合器主动体的结构示意图;
图5为本发明实施例1中外骨骼机器人膝关节离合器和小腿结构的结合示意图;
图6为本发明实施例1中外骨骼机器人中大腿结构和小腿结构的结合示意图;
图7为本发明实施例1中外骨骼机器人中大腿结构和小腿结构的另一角度的结合示意图。
具体实施方式
以下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
实施例1
本实施例提供一种外骨骼机器人膝关节离合器,如图1-7所示,包括牙嵌离合器从动体2、凸轮随动器4、牙嵌离合器主动体5和传动轮7;
牙嵌离合器主动体5和传动轮7之间同轴传动连接,牙嵌离合器主动体5和牙嵌离合器从动体2相对的端面分别设有相匹配的牙结构51和21;所述传动轮7传动连接于步进电机8;
所述牙嵌离合器主动体5呈圆柱凸轮结构,其侧表面设有曲线沟槽52,牙嵌离合器主动体5和凸轮随动器4同轴套接并可相对凸轮随动器4转动,凸轮随动器4上的凸柱41和牙嵌离合器主动体5的曲线沟槽52相配合;牙嵌离合器主动体5转动时,凸轮随动器4的凸柱可通过沿牙嵌离合器主动体5的曲线沟槽52移动推动牙嵌离合器主动体5沿凸轮随动器4轴向移动,从而使牙嵌离合器主动体5和牙嵌离合器从动体2的牙结构分离或咬合;
所述牙嵌离合器从动体2和凸轮随动器4均与外骨骼机器人的小腿结构1的上端固定连接,外骨骼机器人的小腿结构1的上端和外骨骼机器人的大腿结构3的下端可转动连接,外骨骼机器人的大腿结构3的上端传动连接于所述步进电机8。
在本实施例中,所述步进电机8同轴传动连接有主动轮9,主动轮9和传动轮7通过传动带传动连接。步进电机8启动时,通过主动轮9向传动轮7传递动力。
实施例2
本实施例提供一种实施例1所述外骨骼机器人膝关节离合器的工作方法,具体过程为:
当外骨骼机器人一侧的腿结构需要向前迈步时,步进电机正转,从而驱动大腿结构和小腿结构整体向前运动,同时步进电机驱动传动轮正转,从而带动牙嵌离合器主动体5正转,此时如果小腿结构1与大腿结构3不在一条直线上,牙嵌离合器主动体和牙嵌离合器从动体处于咬合状态,牙嵌离合器主动体5会带动牙嵌离合器从动体2正转,从而带动小腿结构1还相对于大腿结构向前运动;牙嵌离合器主动体5转动的过程中,由于凸轮随动器4是固定的,因此凸轮随动器4的凸柱41在曲线沟槽52内的相对移动会推动牙嵌离合器主动体5轴向移动,逐渐与牙嵌离合器从动体2分离;当小腿结构1向前运动至和大腿结构3成直线,脚足跟落地,此时牙嵌离合器主动体5恰好与牙嵌离合器从动体2彻底分离,小腿失去动力不再向前运动;此时,外骨骼机器人另一侧的腿结构开始向前迈步;
此时,外骨骼机器人一侧的腿结构所对应的步进电机反转,小腿结构1和大腿结构3开始整体向后运动,同时步进电机8通过传动轮7带动牙嵌离合器主动体5反转并反向轴向移动,直至牙嵌离合器主动体5和牙嵌离合器从动体2的牙结构重新咬合,此时小腿结构1也开始相对于大腿结构3向后运动,待运动到脚后跟离地时,该一侧的腿结构完成一次步态周期。
这样的结构使得下肢机器人的运动轨迹更符合人体的步态运动,使得使用者更舒适。同时由于使用的步进电机功率小,而且每侧的腿结构只要一个步进电机,这样就更加节约电量,使得同等容量的电池续航能力翻倍。
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变和变形,而所有的这些改变和变形,都应该包括在本发明权利要求的保护范围之内。