基于多路况情况最优滑移估计无人车控制方法及系统
文献发布时间:2024-04-18 19:44:28
技术领域
本申请涉及车辆导航技术领域,特别涉及一种基于多路况情况最优滑移估计无人车控制方法及系统。
背景技术
在无人车的控制过程中,为了实现无人车的稳定控制,提高系统的可靠性,需要将车辆控制在摩擦系数较大的状态。
目前无人车电动驱动防滑难点在于路面识别和最优滑移率估算问题。在特定路况条件下,车辆的滑移率和摩擦系数呈现非线性关系,摩擦系数会随着滑移率的增大存在一个峰值,在控制中期望车辆轮胎的摩擦系数能处于峰值附近,这样车辆会有最优的地面附着力。这就需要控制车辆滑移率处于最优摩擦系数对应的滑移率处。在现有的技术研究中,一般都是设定一个固定最优的滑移设定点进行参照,在控制过程中始终基于这个固定最优的滑移设定点进行控制。但是由于这个设定点只是基于特定的车况和路况情况下估计的值,不具有泛化性该,在多种路况同时存在的情况下,严重影响整个系统的控制性能。
同时,目前的最优估计和控制模型进行结合控制方法,不能消除高频变化带来的影响,这些都是车辆驱动制动防滑中所面临的难点。
发明内容
针对现有技术中存在的技术不足。本发明提供了一种基于多路况情况最优滑移估计无人车控制方法、系统计算机设备及计算机可读存储介质,主要解决无人车在不同路况和车况的情况下最优滑移率估计问题,以及通过最优滑移率始终将车辆的驱动和制动系统控制在最优摩擦系数附近。
根据第一方面,本发明实施例提供一种基于多路况情况最优滑移估计无人车控制方法,包括如下步骤:
获取无人车的车辆速度v和车轮角速度ω;
将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ);其中,设置多种道路场景,每一种道路场景对应一个摩擦系数估计模型;
将所述序列对(μ,λ)输入到长短时记忆神经网络中,估计得到最优的滑移率λ
将根据摩擦系数估计模型估计得到的滑移率λ和长短时记忆神经网络估计得到的最优的滑移率λ
在一种具体的实施方式中,根据车辆输入力矩和预先建立的车辆模型,计算得到无人车的车辆速度v和车轮角速度ω。
在一种具体的实施方式中,所述预先建立的车辆模型为:
Jω=rF
Mv=-F
其中,J为车轮转动惯量,M为四分之一车辆重量,r为车辆轮胎半径,F
在一种具体的实施方式中,所述的摩擦系数估计模型为:
μ=a(1-e
其中,r为车辆轮胎半径,a、b、c为路面系数,每一种道路场景对应一组路面系数a、b、c。
在一种具体的实施方式中,多种道路场景包括积水路面、积雪路面、结冰路面、干燥路面。
在一种具体的实施方式中,根据转矩补偿量Td对车辆进行控制包括:车辆MPC控制器根据控制指令计算得到转矩T,根据转矩补偿量Td对转矩T进行补偿,实现车辆的闭环控制。
根据第二方面,本发明实施例提供一种基于多路况情况最优滑移估计无人车控制系统,系统包括:
车辆状态获取模块,用于获取无人车的车辆速度v和车轮角速度ω;
摩擦系数估计模块,用于将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ);其中,设置多种道路场景,每一种道路场景对应一个摩擦系数估计模型;
最优滑移率计算模块,用于将所述序列对(μ,λ)输入到长短时记忆神经网络中,估计得到最优的滑移率λ
转矩补偿控制模块,用于将根据摩擦系数估计模型估计得到的滑移率λ和长短时记忆神经网络估计得到的最优的滑移率λ
根据第三方面,本发明实施例提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面任一实施方式中所述的基于多路况情况最优滑移估计无人车控制方法。
根据第四方面,本发明实施例提供一种计算机可读存储介质,用于存储计算机程序,该程序被处理器执行时实现第一方面任一实施方式中所述的基于多路况情况最优滑移估计无人车控制方法。
本发明公开一种基于多路况情况最优滑移估计无人车控制方法、系统计算机设备及计算机可读存储介质,设置多种道路场景,每一种道路场景对应一个摩擦系数估计模型;将所述无人车的车辆速度、车轮角速度输入到摩擦系数估计模型中,估计得到包括滑移率和摩擦系数的序列对;将所述序列对输入到长短时记忆神经网络中,估计得到最优的滑移率,可以在不同车况,路况的情况下估算出最优的滑移率,泛化性较强;将得到的最优滑移率与车辆计算得到滑移值进行差值输入到滑移控制器中来对控制器转矩输入进行补偿,使车辆始终保持在最优的地面附着系数下,提高了控制系统的可靠性,同时有效消除了高频变化给车辆控制系统带来的影响。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为特定路况条件下摩擦系数和滑移率之间的关系曲线图;
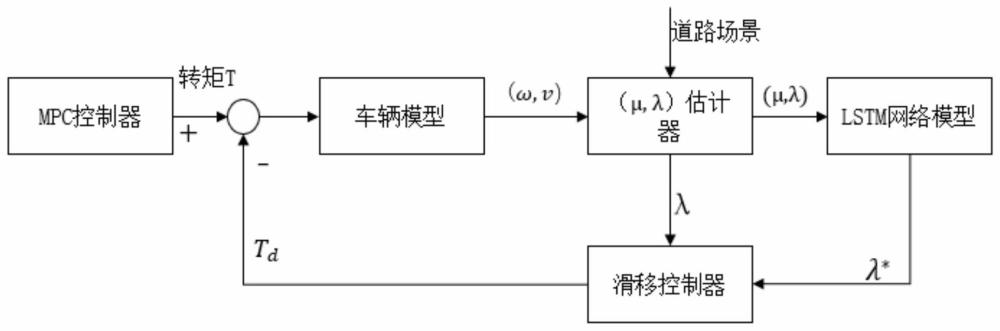
图2为本发明实施例中的无人车控制系统结构框图;
图3为基于多路况情况最优滑移估计无人车控制方法的流程图。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合附图对本申请实施方式作进一步地详细描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,可以是无线连接,也可以是有线连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
本发明实施例提供一种基于多路况情况最优滑移估计无人车控制方法,包括如下步骤:
S1、获取无人车的车辆速度v和车轮角速度ω;
其中,在一种具体的实施方式中,根据车辆输入力矩和预先建立的车辆模型,计算得到无人车的车辆速度v和车轮角速度ω。
在一种具体的实施方式中,所述预先建立的车辆模型为:
Jω=rF
Mv=-F
其中,J为车轮转动惯量,M为四分之一车辆重量,r为车辆轮胎半径,F
在另一种具体的实施方式中,根据车辆上固连的传感器检测车辆速度v和车轮角速度ω。例如,可以采用轮速传感器采集车轮转速信息,解算得到车辆速度v,采用微机械陀螺仪测量车轮角速度ω。
S2、将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,同时根据车辆当前所处的道路场景,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ);其中,设置多种道路场景,每一种道路场景对应一个摩擦系数估计模型;
在一种具体的实施方式中,所述的摩擦系数估计模型为:
μ=a(1-e
其中,r为车辆轮胎半径,a、b、c为路面系数,每一种道路场景对应一组路面系数a、b、c。
在一种具体的实施方式中,多种道路场景可以包括积水路面、积雪路面、结冰路面、干燥路面等等。在服务器或者车辆存储器中存储每种道路场景对应的路面系数。
驾驶过程种中首先获取路面场景信息,可以通过车辆上安装的视觉传感器或者激光传感器获取图像信息或者激光点云信息,对相应的像信息或者激光点云信息进行分析处理,确定道路场景。
具体地,可以提取图像特征信息,输入到SVM模型中,确定图像对应的道路场景。也可以对激光点云信息进行聚类,将聚类结果输入到SVM模型中,确定图像对应的道路场景。
在另外一个可能的实施例中,路面系数不存储在服务器或者车辆存储器中,而是在车辆行驶过程中实时计算滑移率和摩擦系数,基于多组滑移率和摩擦系数数据,进行曲线拟合,得到一组实际道路场景对应的路面系数。在本实施方式中,通过实时计算滑移率和摩擦系数,基于多组滑移率和摩擦系数数据进行曲线拟合,得到一组实际道路场景对应的路面系数,可以更好地模拟道路的实际情况,提供更准确的最优滑移率,并且能够涵盖所有的路面场景,显著提高方法的精度和适应性。
在对多组滑移率和摩擦系数数据进行曲线拟合,得到一组实际道路场景对应的路面系数之后,再根据相应的路面系数得到摩擦系数估计模型。然后将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ)。此时无需再确定车辆当前所处的道路场景。
进一步,在具体实施的过程中,当检测到实际道路场景发生变化时,例如路面场景的类型发生变化,或者检测到光照强度、空气湿度、能见度、粉尘度等环境数据发生变化,重新计算路面系数,否则保持路面系数不变。其中,当光照强度、空气湿度、能见度、粉尘度等环境数据的变化幅度超过设定的阈值时,认为光照强度、空气湿度、能见度、粉尘度等环境数据发生变化。
光照强度空气湿度、能见度、往往与天气状态是相关的,天气的变化往往会导致路面场景的变化,而空气中的粉尘度对路面的整洁度有直接影响,路面的整洁度进一步对摩擦系数曲线有明显的影响。因此,考虑光照强度、空气湿度、能见度、粉尘度等环境数据的变化,重新确定路面系数,能够及时对路面系数进行更新,同时不必频繁地进行更新,节约了系统资源。
S3、将所述序列对(μ,λ)作为当前时刻的输入,输入到长短时记忆神经网络(LSTM,Long Short-Term Memory)中,估计得到最优的滑移率λ
长短期记忆网络当前时刻的输入特征包含多对(μ,λ)向量:
Xt={λ
其中p为窗口长度。
进一步,长短时记忆神经网络还包括上一时刻长短时记忆神经网络的输出值λ
长短时记忆神经网络包括3个门结构,分别是遗忘门Ft、输入门It和输出门Ot,遗忘门Ft决定当前时刻需要遗忘的信息,将相应的信息从状态C中删除;输入门It决定将哪些信息加入到状态C中,输出门Ot则决定哪些信息从状态C中输出。具体地:
Ft=σ(Wf·[λ
It=σ(Wi·[λ
Ot=σ(W0·[λ
其中,σ(·)为激活函数,为Sigmoid函数;Wf为遗忘门的权重矩阵,bf为遗忘门的偏置项,Wi为输入门的权重矩阵,bi为输入门的偏置项,W0为输出门的权重矩阵,b0为输出门的偏置项。
当前时刻状态Ct计算公式如下:
Ct=Ft·Ct-1+It·Ct‘
其中。Ct‘为当前时刻输入时的状态:
Ct‘=tanh(Wc·[λ
其中,Wc为输出权重矩阵,bc为输出偏置项。
长短时记忆神经网络的输出λ
λ
其中,长短时记忆神经网络模型采用单层长短时记忆神经网络模型,使用交叉熵作作为损失函数。
进一步,在步骤S1之前,所述方法还包括以下步骤:
(1)构建训练样本。为了训练长短时记忆神经网络需要收集训练样本集,通过对不同路况下的参考曲线进行采样来获得所述训练样本集。或者通过实际车辆的测量得到的滑移率和摩擦系数数据获得所述训练样本集。
(2)使用滑动窗口来选择(μ,λ)对,并构建特征向量。每个窗口都与最佳滑动值λ
(3)根据构建的特征向量对长短时记忆神经网络进行训练,得到长短时记忆神经网络模型。
S4、将根据摩擦系数估计模型估计得到的滑移率λ和长短时记忆神经网络估计得到的最优的滑移率λ
在一种具体的实施方式中,步骤S4中,根据转矩补偿量Td对车辆进行控制包括:车辆MPC控制器根据控制指令计算得到转矩T,根据转矩补偿量Td对转矩T进行补偿,实现车辆的闭环控制。
基于相同构思,本发明实施例还提供一种基于多路况情况最优滑移估计无人车控制系统,系统包括:
车辆状态获取模块,用于获取无人车的车辆速度v和车轮角速度ω;
在一种具体的实施方式中,车辆状态获取模块,具体用于根据车辆输入力矩和预先建立的车辆模型,计算得到无人车的车辆速度v和车轮角速度ω。
在一种具体的实施方式中,所述预先建立的车辆模型为:
Jω=rF
Mv=-F
其中,J为车轮转动惯量,M为四分之一车辆重量,r为车辆轮胎半径,F
在另一种具体的实施方式中,根据车辆上固连的传感器检测车辆速度v和车轮角速度ω。例如,可以采用轮速传感器采集车轮转速信息,解算得到车辆速度v,采用微机械陀螺仪测量车轮角速度ω。
摩擦系数估计模块,用于将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ);其中,设置多种道路场景,每一种道路场景对应一个摩擦系数估计模型;
在一种具体的实施方式中,所述的摩擦系数估计模型为:
μ=a(1-e
其中,r为车辆轮胎半径,a、b、c为路面系数,每一种道路场景对应一组路面系数a、b、c。
在一种具体的实施方式中,多种道路场景可以包括积水路面、积雪路面、结冰路面、干燥路面等等。在服务器或者车辆存储器中存储每种道路场景对应的路面系数。
驾驶过程种中首先获取路面场景信息,可以通过车辆上安装的视觉传感器或者激光传感器获取图像信息或者激光点云信息,对相应的像信息或者激光点云信息进行分析处理,确定道路场景。
具体地,可以提取图像特征信息,输入到SVM模型中,确定图像对应的道路场景。也可以对激光点云信息进行聚类,将聚类结果输入到SVM模型中,确定图像对应的道路场景。
在另外一个可能的实施例中,路面系数不存储在服务器或者车辆存储器中,而是在车辆行驶过程中实时计算滑移率和摩擦系数,基于多组滑移率和摩擦系数数据,进行曲线拟合,得到一组实际道路场景对应的路面系数。在本实施方式中,通过实时计算滑移率和摩擦系数,基于多组滑移率和摩擦系数数据进行曲线拟合,得到一组实际道路场景对应的路面系数,可以更好地模拟道路的实际情况,提供更准确的最优滑移率,并且能够涵盖所有的路面场景,显著提高方法的精度和适应性。
在对多组滑移率和摩擦系数数据进行曲线拟合,得到一组实际道路场景对应的路面系数之后,再根据相应的路面系数得到摩擦系数估计模型。然后将所述无人车的车辆速度v、车轮角速度ω输入到摩擦系数估计模型中,估计得到包括滑移率λ和摩擦系数μ的序列对(μ,λ)。此时无需再确定车辆当前所处的道路场景。
进一步,在具体实施的过程中,当检测到实际道路场景发生变化时,例如路面场景的类型发生变化,或者检测到光照强度、空气湿度、能见度、粉尘度等环境数据发生变化,重新计算路面系数,否则保持路面系数不变。其中,当光照强度、空气湿度、能见度、粉尘度等环境数据的变化幅度超过设定的阈值时,认为光照强度、空气湿度、能见度、粉尘度等环境数据发生变化。
光照强度空气湿度、能见度、往往与天气状态是相关的,天气的变化往往会导致路面场景的变化,而空气中的粉尘度对路面的整洁度有直接影响,路面的整洁度进一步对摩擦系数曲线有明显的影响。因此,考虑光照强度、空气湿度、能见度、粉尘度等环境数据的变化,重新确定路面系数,能够及时对路面系数进行更新,同时不必频繁地进行更新,节约了系统资源。
最优滑移率计算模块,用于将所述序列对(μ,λ)输入到长短时记忆神经网络中,估计得到最优的滑移率λ
长短期记忆网络当前时刻的输入特征包含多对(μ,λ)向量:
Xt={λ
其中p为窗口长度。
进一步,长短时记忆神经网络还包括上一时刻长短时记忆神经网络的输出值λ
长短时记忆神经网络包括3个门结构,分别是遗忘门Ft、输入门It和输出门Ot,遗忘门Ft决定当前时刻需要遗忘的信息,将相应的信息从状态C中删除;输入门It决定将哪些信息加入到状态C中,输出门Ot则决定哪些信息从状态C中输出。具体地:
Ft=σ(Wf·[λ
It=σ(Wi·[λ
Ot=σ(W0·[λ
其中,σ(·)为激活函数,为Sigmoid函数;Wf为遗忘门的权重矩阵,bf为遗忘门的偏置项,Wi为输入门的权重矩阵,bi为输入门的偏置项,W0为输出门的权重矩阵,b0为输出门的偏置项。
当前时刻状态Ct计算公式如下:
Ct=Ft·Ct-1+It·Ct‘
其中。Ct‘为当前时刻输入时的状态:
Ct‘=tanh(Wc·[λ
其中,Wc为输出权重矩阵,bc为输出偏置项。
长短时记忆神经网络的输出λ
λ
其中,长短时记忆神经网络模型采用单层长短时记忆神经网络模型,使用交叉熵作作为损失函数。
进一步,在步骤S1之前,所述方法还包括以下步骤:
(1)构建训练样本。为了训练长短时记忆神经网络需要收集训练样本集,通过对不同路况下的参考曲线进行采样来获得所述训练样本集。或者通过实际车辆的测量得到的滑移率和摩擦系数数据获得所述训练样本集。
(2)使用滑动窗口来选择(μ,λ)对,并构建特征向量。每个窗口都与最佳滑动值λ
(3)根据构建的特征向量对长短时记忆神经网络进行训练,得到长短时记忆神经网络模型。
转矩补偿控制模块,用于将根据摩擦系数估计模型估计得到的滑移率λ和长短时记忆神经网络估计得到的最优的滑移率λ
在一种具体的实施方式中,步骤S4中,根据转矩补偿量Td对车辆进行控制包括:车辆MPC控制器根据控制指令计算得到转矩T,根据转矩补偿量Td对转矩T进行补偿,实现车辆的闭环控制。
本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第一方面任一实施方式中所述的基于多路况情况最优滑移估计无人车控制方法。
本发明实施例还提供了一种计算机可读存储介质,用于存储计算机程序,该程序被处理器执行时实现第一方面任一实施方式中所述的基于多路况情况最优滑移估计无人车控制方法。
本发明设计最优滑移估计策略,通过分析车辆驱动与制动过程中的(μ,λ)序列对。可以推断出路面摩擦系数和滑移率之间的非线性关系,进而预测出最佳滑移值λ
同时,将最优滑移估计网络模型和模型预测控制进行有效的结合,能够有效消除高频变化带来的影响,将评估出来的λ
在另一种可能的实施例中,显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
- 一种基于无人驾驶的路况监测车以及监测方法
- 基于无人机提升消防车救援速度的控制系统及方法、消防车
- 一种基于滑转滑移耦合估计的无人驾驶车辆轨迹跟踪控制方法
- 一种基于滑转滑移耦合估计的无人驾驶车辆路径跟踪控制方法