全自动晶圆外观检验系统
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及一种电子检测技术领域,具体涉及一种晶圆外观检验系统。
背景技术
晶圆是指制作硅半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶圆,也就是晶圆。目前国内晶圆生产线以8英寸和12英寸为主。
厂家在交货或者收货环节,经常要对其品质检验。晶圆盒一般储存在FOUP中,需要将其一片片取出再检验,晶圆周转过程中,其圆心位置、方向均会发生小角度的偏移,此外,还需要对其背部进行检测。现有的检测系统无法满足上述检测需求。
发明内容
本发明要解决的技术问题是解决上述现有的不足,提供一种晶圆自动检测系统。
为了解决上述现有的不足,本发明采用的技术方案为:一种全自动晶圆外观检验系统,包括晶圆盒开箱运载机、晶圆取放料机械手、晶圆位置校准机构、晶圆翻转机构以及显微镜检测机构;所述晶圆盒开箱运载机用于对打开晶圆传送盒,所述晶圆取放料机械手用于运载晶圆,所述晶圆位置校准机构用于确定晶圆圆心位置,并将其转动至指定角度;所述晶圆翻转机构用于翻转晶圆以便于对其背面进行检验,所述显微镜检测机构对晶圆表面进行检查。
进一步的,所述晶圆盒开箱运载机包括一个底座,底座用于放置晶圆盒;在底座的侧面设置一个固定板和挡板,固定板与晶圆盒的外壳相配合,挡板与固定板贴合,且挡板可相对固定板上下移动,晶圆盒的前端盖可穿过固定板与挡板相抵,所述挡板上设置有两个开门模组和两个水平定位销,每个开门模组包括一个可转动的闩杆,闩杆前端可伸入晶圆盒中对晶圆盒进行解锁,两个闩杆之间设置联动机构,闩杆之间通过联动机构实现同步转动,水平定位销可伸入晶圆盒中对其进行竖直方向的定位,在水平定位销上还套装有吸盘,吸盘可与晶圆盒的贴合,在水平定位销上设置有负压抽气口。
进一步的,所述晶圆盒开箱运载机为两个,分别对应一个晶圆盒,其中用于放料,另一个用作收料。
进一步的,包括一个可旋转的吸盘、机械臂、扫描装置、主控模块以及放置台;所述扫描装置用于扫描晶圆的边缘位置以及缺口位置;所述吸盘可升降设置,其上升过程中可将晶圆从放置台顶起,下降可使晶圆落在放置台上,旋转过程中可带动晶圆转动;主控模块根据多个晶圆的边缘计算晶圆的中心位置与吸盘中心的偏移量,机械臂根据偏移量将对晶圆进行移动;所述扫描装置的扫描范围为直线,且该直线位于吸盘的径向,扫描装置对经过扫描范围内的晶圆边缘位置进行记录,当扫描到的边缘位置与吸盘圆心距离最大时,设此时最大值为d,此时晶圆圆心与扫描范围在同一条直线上,偏移量为d-r,r为晶圆半径,机械臂沿该直线方向移动晶圆d-r;当晶圆的圆心与吸盘的圆心重合后,扫描装置扫描缺口的位置,吸盘带动晶圆转动,使缺口转动到指定位置。
进一步的,晶圆翻转机构包括两个夹臂用于夹持晶圆,其特征在于:还包括一个滑轨以及转台,夹臂的端部设置在滑轨上可沿其滑动,两个夹臂位于滑轨上的端部分别铰接一个连接片,连接片的另一端与转台铰接,转台连接电机转轴由其带动转动;当两个夹臂夹紧后,连接片与转台的铰接轴心与电机轴心位于同一平面,且该平面与滑轨平行,且任意连接片的两端均位于电机轴心的两侧。
进一步的,所述连接片与转台连接的端部呈半圆形;连接片的两端连线与电机轴心线垂直相交。
进一步的,所述夹臂上设置若干个夹块,夹块表面设置有凹槽,凹槽与晶圆外边缘相配合。
进一步的,所述晶圆翻转机构还包括一个传感器用于感知夹臂之间是否存在晶圆。
从上述技术方案可以看出本发明具有以下优点:通过观察对比针孔位置与探针位置,可以快速判断探针是否出现倾斜弯曲,进而进行校正。且通过更换片状物可以实现不同型号针卡的校正。托板的设计则可以缓解操作人员疲劳,适合长时间劳作。
从上述技术方案可以看出本发明具有以下优点:可自动传输晶片至显微镜观察,避免人为搬运的损坏;也可以目检晶片的表面及背面;传输过程采用直线动作,避免晶片被抛出。适合用于半导体厂和晶圆测试厂使用。
附图说明
图1为本发明的结构示意图;
图2为本发明中晶圆盒开箱运载机的结构示意图;
图3为本发明中晶圆盒开箱运载机的背部结构示意图;
图4为晶圆位置校准机构的结构示意图;
图5为晶圆翻转机构的结构示意图;
图6为晶圆翻转机构的结构示意图。
具体实施方式
以下结合附图对本发明的具体实施方式做具体说明。
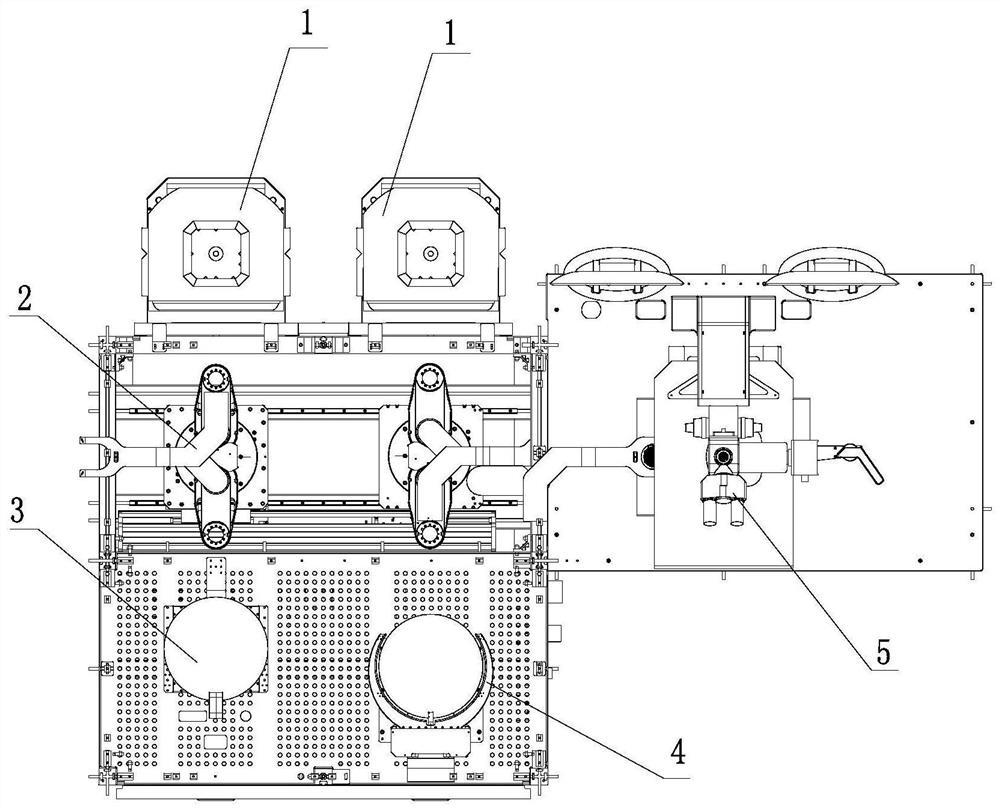
如图1所示,本发明的全自动晶圆外观检验系统包括晶圆盒开箱运载机1、晶圆取放料机械手2、晶圆位置校准机构3、晶圆翻转机构4以及显微镜检测机构;所述晶圆盒开箱运载机用于对打开晶圆传送盒,所述晶圆取放料机械手用于运载晶圆,所述晶圆位置校准机构用于确定晶圆圆心位置,并将其转动至指定角度;所述晶圆翻转机构用于翻转晶圆以便于对其背面进行检验,所述显微镜检测机构对晶圆表面进行检查。
其中晶圆盒开箱运载机1的具体结构如图2和图3所示,其包括机架17和底座16,底座16用于放置晶圆盒;在底座的侧面设置一个固定板11和挡板12,挡板12与固定板11贴合,且挡板12可相对固定板上下移动。挡板的12的上下移动可以通过丝杠模组或者气缸来实现。晶圆盒的前端盖可穿过固定板与挡板12相抵,所述挡板上设置有两个开门模组和两个水平定位销18,每个开门模组包括一个可转动的闩杆13,闩杆13前端可伸入晶圆盒中对晶圆盒进行解锁,两个闩杆13之间设置联动机构,闩杆之间通过联动机构实现同步转动,水平定位销18可伸入晶圆盒中对其进行竖直方向的定位,在水平定位销上还套装有吸盘19,吸盘19可与晶圆盒的贴合,在打开晶圆盒后,利用吸盘将打开后的端盖吸附住,在水平定位销上设置有负压抽气口从而将空气排出。
所述底座上还设置有多个竖直定位销15,其可伸入晶圆盒的底部对其进行水平方向的定位。竖直定位销不仅可以起到定位作用,还可以起到识别作用,只有晶圆盒底部的销孔与底座上的定位销位置对应,晶圆盒才能放置在底座上。底座上有一个卡勾14,卡勾14由电机带动水平移动,当晶圆盒放置后,卡勾水平移动伸入晶圆盒底部将其固定。
所述联动机构包括一个横杆110和气缸112,横杆110的两端各铰接一个连接块111,闩杆13分别设置在连接块上,闩杆3穿过挡板,连接块转动带动闩杆进行转动,气缸112用于推动横杆110进行平移。为了并与气缸推动横杆,在横杆的下方设置竖直的连接块,可以用水平气缸推动该连接块,连接块带动横杆平移从而带动两个连接块转动,进而转动闩杆。
定位销则用来实现多向的定位,卡勾其盒体固定住,利用闩杆的连锁机制可以将端盖打开,再利用吸盘将端盖吸附住,随后挡板可以下移从而实现端盖与盒体的分离,从而实现自动化开箱。
晶圆取放料机械手包括两个平行的转臂,分别为第一转臂和第二转臂,第一转臂一端安装在基座上且可转动设置,另一端连接第二转臂端部,第二转臂的另一端设置转台,转台上设置有晶圆吸盘以及红外传感器;所述第一转臂、第二转臂以及转台的转轴均平行设置;所述多轴机械手可升降设置。红外传感器的数量为两个,且位于同一高度,红外传感器对料盒的晶圆进行扫描判断每个插槽中是否存放了物料,设置两个红外传感器可以减少误判漏判。
晶圆取放料机械手的具体为本领域较为成熟的技术手段,在此便不再进行赘述。
晶圆位置校准机构3如图4所示,包括一个可旋转的吸盘32、机械臂31(该机械臂可以为取放料机械手2的转臂)、扫描装置33、主控模块以及放置台34;所述扫描装置用于扫描晶圆的边缘位置以及缺口位置,采用红外扫描,扫描装置的扫描范围为直线,且该直线位于吸盘32的径向。
所述吸盘32可以吸附晶圆,可升降设置,其上升过程中可将晶圆从放置台34顶起,下降可使晶圆落在放置台上,旋转过程中可带动晶圆转动。
主控模块对数据进行处理。具体的,扫描装置对经过扫描范围内的晶圆边缘位置进行记录,当扫描到的边缘位置与吸盘圆心距离最大时,设此时最大值为d,此时晶圆圆心与扫描范围在同一条直线上,偏移量为d-r,r为晶圆半径,机械臂或者吸盘沿该直线方向移动晶圆d-r。当晶圆的圆心与吸盘的圆心重合后,扫描装置扫描缺口的位置,吸盘带动晶圆转动,使缺口转动到指定位置。
晶圆位置校准机构可以快速的识别晶圆的圆心位置,快速进行偏移纠偏,此外还可以对缺口进行扫描,进行角度纠偏。晶圆位置校准机构还设置有一个扫描装置,用于扫描晶圆上的标签,识别其身份。
晶圆翻转机构如图6和图5所示,其包括两个夹臂41用于夹持晶圆,夹臂呈圆弧形,其上设置若干个夹块42,夹块表面设置有凹槽,凹槽与晶圆外边缘相配合。夹块42可以采用质量较软的材料,减少晶圆的磨损,才外采用夹块的方式可以减少与晶圆的直接接触,减少污染面积。在夹臂上方可以设置一个传感器43用于感知夹臂之间是否存在晶圆。
晶圆翻转机构还包括一个底盘49,在底盘49上设置一个滑轨44以及转台48,夹臂的端部设置在滑轨44上可沿其滑动,两个夹臂位于滑轨上的端部分别铰接一个连接片47,连接片呈“S”型或者“C”型,连接片47的另一端与转台48铰接,转台连接电机410的转轴由其带动转动;当两个夹臂夹紧后,连接片与转台的铰接轴心与电机轴心位于同一平面,且该平面与滑轨平行,且任意连接片的两端均位于电机轴心的两侧,连接片的两端连线与电机轴心线垂直相交。此时即使电机断电,由于连接片的铰接点、转台与电机的连接点、位于同一条直线上,且该直线与滑轨平行,此时转台只受到平行与滑轨方向上的作用力,转台并不会发生转动,因此夹臂可以保持锁定状态,晶圆不会发生脱落。为了便于连接片的转动,连接片与转台连接的端部可以设置成半圆形。两个连接片之间转动互不影响。
此外,本发明还设置了两个位置传感器45,夹臂位于转台的端部还设置有感应片46,位置传感器用于探测感应片。从而判断夹臂的移动位置。精准控制夹持力度,防止晶圆损坏。
显微镜检测机构用于对晶圆进行检测,其上设置切换按钮,主要用于目检和镜检的切换。
本发明还包括一个无尘外壳,各功能模块均位于该无尘外壳中,外壳顶部通入洁净气体,气体自顶部向下流动,该设计用于使晶圆处于无尘环境,减少对晶圆的污染。
本发明的工作流程如下:圆盒开箱运载机为双工位结构,分别为站点A和站点B,当A、B站点均使用时,站点A放置装载晶圆的物料盒,站点B放置空的物料盒,两个站点的物料盒种类必须一致;A、B站点使用其一时,只要将装载的物料盒放置其中一个站点即可。
晶圆取放料机械手2将晶圆从晶圆取料后放入晶圆位置校准机构3,校准中心位置并旋转需要的角度,此外还对晶圆进行扫描,读取其ID。
校准后,晶圆取放料机械手将其移动至翻转机构,将晶圆翻转180°,随后,取放料机械手2将其运载至显微镜检测机构,完成背面检测。