一种基于神经网络求解时变环境下多目标最短路径的方法
文献发布时间:2023-06-19 11:05:16
技术领域
本发明属于网络优化技术领域与人工智能技术领域的结合,具体涉及设计一种基于神经网络求解时变环境下多目标最短路径的方法。
背景技术
经典的多目标最短路径问题是优化多个目标的路由问题,例如在交通运输过程中,希望找寻路程短且路况好的路径,那么需要同时优化两个目标函数,最短的旅行时间和距离。网络中每条边权重函数值是不随时间发生变化的。但是,比如在交通运输过程中,运输时间随着路况的拥堵情况发生变化的,也就是边权重函数是依赖于时间的,这也就扩展出时变环境下求解多目标最短路径的问题。
近年来,国内外学者相继开展时变环境下多目标最短路径的研究,其技术难点主要集中在求解方法、求解速度和求解精度。
求解方法方面,从国内外的研究成果来看,时变环境下求解多目标问题计算复杂度高,传统的图论求解方法如动态规划和标号设置算法等难以突破,而智能算法如遗传算法和蚁群算法等无法求得精确解。
求解速度方面,国内外的研究论文求出精确解的方法基于传统算法如动态规划、标号设置算法等因计算量大,算法效率低,运行环境大都依赖高性能计算机的支持,在大众化的PC机上无法满足实际需要。
求解精度方面,一般系统采用的传统路由算法忽略时变环境去寻找多目标最短路径,换言之将网络看作静态,很难求出精确解。
发明内容
本发明的目的是为克服上述现有技术存在的缺点和不足,提供一种基于神经网络求解时变环境下多目标最短路径的方法。
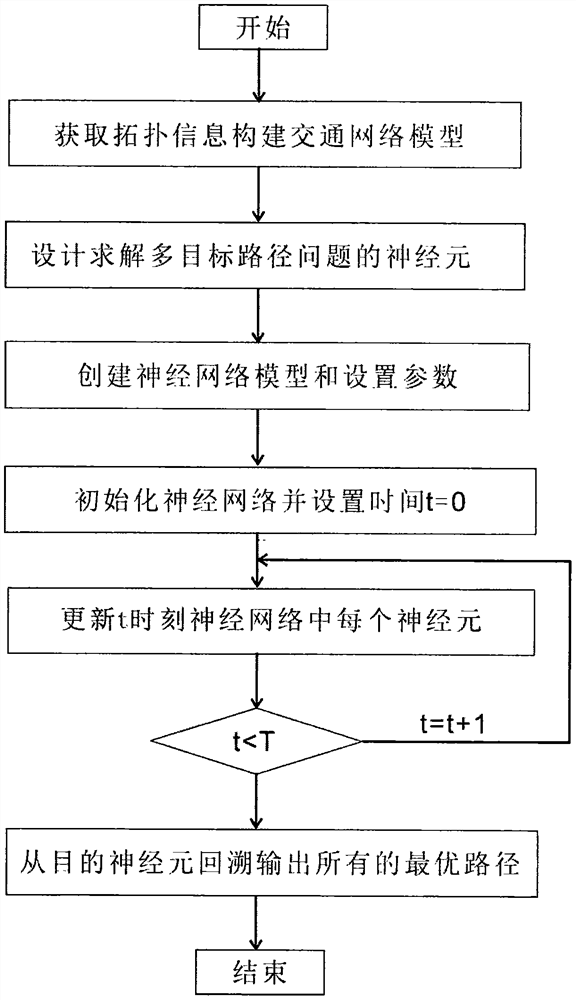
本发明所述的一种基于神经网络求解时变环境下多目标最短路径的方法,具体步骤包括:
第1步,利用地图软件实时采集网络拓扑信息构建交通网络模型,采集的信息包括各节点前驱和后继,以及各边权重函数,比如路由时间函数B
第2步,根据采集到的网络拓扑信息加载到神经网络模型中,且设计构建的神经网络模型的拓扑结构与交通网络的拓扑结构相同,不用前期数据集对神经网络训练;
第3步,初始化神经网络,包括各个神经元的接收器、过滤器、存储器、波产生器和波发送器5个部分,在接收器中设置解码函数F,在过滤器中设置过滤函数D,在存储器开辟存储空间S,在波产生器中初始化能量函数E和阈值函数θ,在波发生器中设置编码函数J并设置网络的初始时刻为t=0;
第4步,更新神经网络,分为3个子步骤:自动波的接收与过滤、自动波的存储与产生和自动波的激活和转发;采用“神经元激活”技术和“自动波过滤”技术更新每个神经元在网络t时刻的状态;
第5步,更新网络时刻t=t+1,重复第4步直到t=T,其中T是网络的时间上限;
第6步,遍历目的神经元接收到的波利用回溯的方法寻找到所有的多目标最短路径。
第1步所述的权重函数是根据记录拓扑数据利用统计软件计算变量的概率分布函数,一般为分段函数或线性连续函数。
第2步所述的神经网络模型的拓扑结构与交通网络的拓扑结构相同,不用前期数据集对神经网络训练。
第3步所述的初始化神经网络包含5个部分;
第3.1步,接收器中初始化为
第3.2步,过滤器中初始化过滤函数D,筛选遵循Pareto最优非主导性原则;
第3.3步,储波器中开辟存储空间S
第3.4步,波产生器中初始化阈值函数
第3.5步,波发生器中初始化为
第4步所述的神经网络更新由以下三个子步骤构成:自动波的接收与过滤、自动波的存储与产生和自动波的激活和转发,其详细步骤分别如下:
第4.1步,自动波的接收与过滤;
第4.1.1步,检测接收器W
第4.1.2步,根据Pareto最优非主导性原则,过滤器利用过滤函数D过滤掉一部分自动波,比如1号波的权重向量是(3,5),2号波的权重向量是(4,6),两个波权重向量分别比较3<4且5<6,1号波优于2号波,所以2号波被神经元过滤掉;
第4.2步,自动波的存储与产生;
第4.2.1步,将过滤后的每个波权值向量(t,r)和后继边的成本向量(B
第4.2.2步,将相关参量t
第4.3步,自动波的激活和转发;
第4.3.1步,对第4.2.2步初始化的能量函数E
第4.3.2步,激活后的自动波根据它的能量函数E
第5步所述的网络时刻t的更新,每更新迭代一次t=t+1,神经网络中所有神经元都会更新自身状态,即执行第4步,当时刻t到达时间上限T时,神经网络停止更新。
第6步所述的遍历每个到达目的神经元的自动波,通过各神经元储波器对路径回溯,输出所有多目标最短路径,包括每条路径的出发时间、路径经过的节点、离开每个结点的时间、每段弧的成本向量和路径的总时间和总成本。
本发明的优点和有益效果
本发明能够准确求解时变环境下多目标最短路径,且设计构建的神经网络相比于传统的算法提高了计算能力,简化了计算复杂度,进而提高计算效率。此外,设计构建的神经网络可通过进一步改进解决复杂的网络优化问题。
附图说明
图1是本发明求解时变环境下多目标最短路径问题实施总体流程图;
图2是神经元结构图;
图3是时变网络拓扑图。
具体实施方式
下面结合附图和实施例对本发明进行详细的描述。
一种基于神经网络求解时变环境下多目标最短路径的方法,提供给决策者所有的Pareto最优路径。如图1所示,具体实施方案包括以下内容及步骤:
表1网络的拓扑信息
第1步,利用地图软件实时采集网络拓扑信息构建交通网络模型,采集的信息包括各节点前驱和后继,以及各边时变权重函数,比如路由时间函数B
第2步,根据采集到的网络拓扑信息加载到神经网络模型中,共构建4个神经元,其神经元结构如图2所示,其构建的神经网络拓扑结构与交通网络的拓扑结构相同;设置源点神经元、目的神经元和网络的时间上限T=5,且构建的神经网络不用前期数据集训练。
第3步,初始化神经网络,包括各个神经元的接收器、过滤器、存储器、波产生器和波发送器5个部分;
第3.1步,接收器初始化和解码函数F,
第3.2步,过滤器中初始化过滤函数D,筛选遵循Pareto最优非主导性原则;
第3.3步,储波器中开辟存储空间S
第3.4步,波产生器中初始化阈值函数
第3.5步,波发生器中初始化为
第4步,更新神经网络t时刻各神经元状态,分为3个子步骤:自动波的接收与过滤、自动波的存储与产生、自动波的激活和转发,详细步骤如下:
第4.1步,自动波的接收与过滤;
第4.1.1步,神经元1,2,3,4分别检测接收器W
第4.1.2步,本例选路由时间和路由成本作为两个优化的目标,根据Pareto最优非主导性原则,分两种情况:第一种情况,当多个波同时到达神经元时,路由时间相同而路由成本较大的波会被过滤器过滤;第二种情况,多个波先后到达神经元,晚到达的波路由时间长,那么如果路由成本比先到达的波成本大也会被过滤器过滤;
第4.2步,自动波的存储与产生;
第4.2.1步,将过滤后的每个波权值向量(t,r)和后继边的成本向量(B
第4.2.2步,将相关参量t
第4.3步,自动波的激活和转发;
第4.3.1步,对第4.2步初始化的能量函数E
第4.3.2步,激活后的自动波根据它的能量函数E
第5步,更新网络时刻,设置时刻t=t+1,重复第4步直到t=5,其中5是网络的时间上限,各神经元将停止发波。
第6步,根据3号目的神经元在t=2和t=3时刻接收到两个波利用回溯的方法根据各神经元储波器S
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。