用于检测车辆的驾驶员的注意力分散的装置和方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明总体上涉及检测个人的注意力分散,尤其是车辆中的个人。
更具体地,本发明涉及一种用于检测车辆的驾驶员的注意力分散的装置和方法。
背景技术
已知的实践是使用监测装置来监测机动车辆的驾驶员,该监测装置被设计为确定驾驶员的警觉状态,特别是防止驾驶员在驾驶时睡着。根据所确定的警觉状态,监测装置警告驾驶员,以防止他将自己置于危险的境地。
这种监测装置基于与驾驶员相关联的行为参数和/或车辆的操作参数来推断驾驶员的警觉状态。在实践中,通过分析驾驶员头部的图像来获得行为参数,例如眼睑闭合率或凝视方向,并且从车辆的物理传感器获得车辆的操作参数,例如与方向盘转角、车辆速度或驾驶员在某些按钮上的动作相关的参数。
还有已知的检测系统被设计为,例如,基于驾驶员的凝视方向来评估驾驶员的注意力分散。因此,驾驶员在看路或其车内后视镜时不会被视为注意力分散。当驾驶员朝不同于道路和驾驶所需元素的方向看时,例如朝前排乘客方向看时,会被认为是注意力分散。
这些用于检测驾驶员的注意力分散的系统具有在车辆运行时评估驾驶员注意力是否分散的优势,因此显著改善了驾驶员的安全状况。
发明内容
为了改进用于检测驾驶员的注意力分散的系统,本发明提出了一种用于检测车辆的驾驶员的注意力分散的装置。
更具体地,根据本发明,提出了一种用于检测车辆的驾驶员的注意力分散的装置,其包括:
-图像获取组件,被设计为获取位于所述车辆中的检测区域的至少一幅图像,所述检测区域包括所述车辆的驾驶员的至少一部分,
-处理模块,用于处理所获取的图像,被设计为确定:
与所述驾驶员的头部相关联的方向,以及
所述驾驶员的至少一只手的位置,以及
-分析模块,被设计为:通过基于与头部相关联的方向和至少一只手的位置确定在与所述驾驶员的头部相关联的方向上可能存在至少一只手,检测所述驾驶员的注意力分散。
因此,根据本发明的装置使得能够确定驾驶员是否正在注意他的手并因此可能正在注意他手里拿着的物体,这可能通过使他的注意力从道路上分散而危及他的安全。
根据本发明的检测装置的其他非限制性和有利特征,单独或以任何技术上可能的组合来看,如下:
-还提供了时间测量模块,该时间测量模块被设计为评估由处理模块确定的、至少一只手位于与头部相关联的所述方向上的检测时间;
-还提供了发射模块,用于基于对注意力分散情况的检测来发射报警信号;
-注意力分散情况对应于驾驶员的至少一只手位于至少一个允许区域之外的配置;
-注意力分散情况包括检测时间大于预定阈值的配置;
-发射模块被设计为在车辆被驾驶的情况下发射报警信号;
-驾驶状态对应于检测到车辆的速度大于预定速度值或者未使用自动驾驶单元;
-处理模块还被设计为确定驾驶员的姿势;
-用于处理所获取的图像的处理模块被设计为基于驾驶员的姿势的表示来确定与驾驶员的头部相关联的方向和驾驶员的至少一只手的位置;
-处理模块被设计为确定驾驶员的头部的朝向或驾驶员的凝视方向。
本发明还提出了一种用于检测车辆的驾驶员的注意力分散的方法,其包括以下步骤:
-获取位于所述车辆中的检测区域的至少一幅图像,所述检测区域包括车辆的驾驶员的至少一部分,
-确定与驾驶员的头部相关联的方向,
-确定驾驶员的至少一只手的位置,以及
-通过比较所确定的与头部相关联的方向和所确定的至少一只手的位置来检测驾驶员的注意力分散,以便确定在与驾驶员的头部相关联的方向上可能存在至少一只手。
该方法还可以包括以下步骤:
-测量由处理模块确定的至少一只手位于与头部相关联的方向上的检测时间,以及
-基于对注意力分散情况的检测发射报警信号。
附图说明
以下参考附图的描述作为非限制性示例提供,将有助于理解本发明以及如何实施本发明。
在附图中:
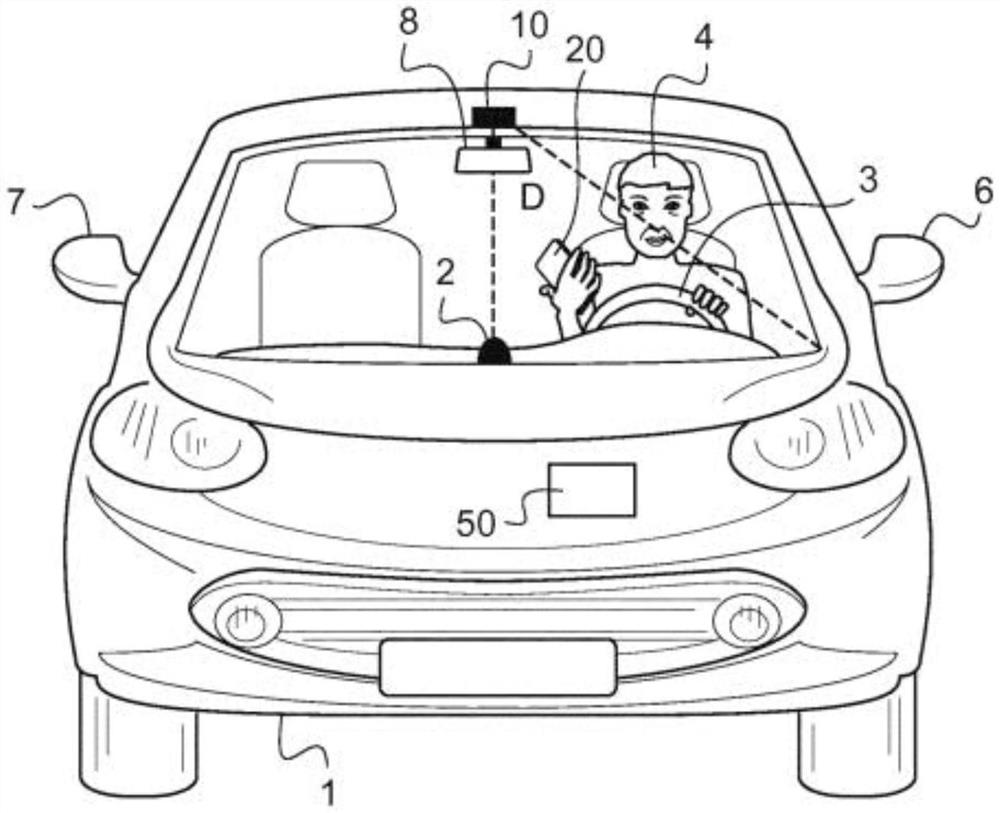
图1示意性地示出了一种配备有根据本发明的用于检测驾驶员的注意力分散的装置的机动车辆的前视图,
图2示出了根据本发明的一种用于检测驾驶员的注意力分散的装置的一个示例,
图3以流程图的形式示出了根据本发明的一种用于检测驾驶员的注意力分散的方法的第一示例,并且
图4以流程图的形式示出了根据本发明的一种用于检测驾驶员的注意力分散的方法的第二示例。
具体实施方式
图1示出了机动车辆1(以下也称为“车辆1”)的前部,其具有用于检测车辆1的驾驶员4的注意力分散的车载装置10。
更准确地说,这种注意力分散检测装置10被设计为基于确定车辆1中驾驶员4的姿势来确定驾驶员4的注意力分散状态。由此确定的姿势使得能够具体推断驾驶员的头部和至少一只手的位置,从而确定驾驶员4是在专心驾驶还是,相反地,注意力分散了。
在本说明书中,如果驾驶员4没有将注意力集中在道路上或镜子(例如,右侧后视镜6或左侧后视镜7或中央镜8)上或没有将注意力集中在诸如方向盘3或变速杆2的元件上,则认为驾驶员4的注意力分散。另一方面,例如,如果驾驶员4将注意力集中在前排乘客或对驾驶无益的物体上,则他被认为是注意力不集中。例如,在图1所示的情况下,驾驶员一只手拿着物体20,物体20在此是移动电话。
如图2所示,注意力分散检测装置10包括图像获取组件22、用于处理获取的至少一幅图像的处理模块24、分析模块26、时间测量模块28和用于发出报警信号的发射模块30。
图像获取组件22以车载方式容纳在车辆1上,更准确地说,位于车辆1的乘客舱中。图像获取组件22被设计为获取车辆1内部的至少一幅图像。
特别地,图像获取组件22被设计为获取位于车辆1内部的检测区域D的图像。如图1所示,检测区域D在变速杆2和车辆1的前门之间延伸(在图1中不可见)。因此,该检测区域D包含方向盘3和驾驶员4的至少一部分。实际上,驾驶员的头部和至少一只手位于检测区域D中。
图像获取组件22包括,例如,至少一个三维传感器21,用于拍摄检测区域D的三维图像,特别是车辆1的驾驶员4的三维图像。作为变型,图像获取组件22还可以包括二维传感器23。二维传感器23被设计为,例如,拍摄驾驶员4的面部图像,特别是他的眼睛的图像。
实际上,为了拍摄检测区域D的图像,三维传感器21例如位于车辆1的前顶灯中,使得其获取检测区域D的平面图。二维传感器23例如布置在车辆1的挡风玻璃的下部,基本上在驾驶员4的前方。
作为变型,三维传感器21和二维传感器23可以放置在车辆1的仪表板上,在其中心区域。
如图2所示,注意力分散检测装置10还包括处理模块24,用于处理由图像获取组件22获取的图像。处理模块24被设计为接收获取的图像并确定车辆1中驾驶员4的姿势。
特别地,处理模块24被设计为基于对获取的图像的处理来确定驾驶员的姿势的表示。驾驶员4的姿势的表示被理解为意指驾驶员4身体各部分的位置和方位,特别是驾驶员4的头部和手。
实际上,基于该姿势的表示,处理模块24被设计为确定与驾驶员4的头部相关联的方向。与头部相关联的方向在这里被理解为表示例如驾驶员头部的总体方向或头部的一部分的方向。在这里描述的例子中,与头部相关联的方向包括头部的朝向或驾驶员4的凝视方向。特别地,处理模块24在这里被设计为确定驾驶员4的头部的朝向。处理模块24还被设计为基于姿势的表示来确定驾驶员4的至少一只手的位置。处理模块24还被设计为当二维传感器23获取图像时、确定驾驶员4的凝视方向。
注意力分散检测装置10还包括分析模块26。分析模块26被设计为基于由处理模块24确定的头部的朝向和手的位置,确定在驾驶员4的头部的朝向上可能存在至少一只手。换句话说,分析模块26确定驾驶员4的头部是否指向他的一只手(或两只手)。作为变型,分析模块26可以确定驾驶员4的目光是否指向他的一只手。
如图2所示,注意力分散检测装置10包括时间测量模块28。该时间测量模块28被设计为评估至少一只手位于驾驶员4的头部的朝向上的检测时间。换句话说,时间测量模块28评估驾驶员4的头部保持指向他的至少一只手的时间(这里称为检测时间)。作为变型,时间测量模块28可以评估驾驶员的视线保持指向他的至少一只手的时间。
最后,注意力分散检测装置10包括用于发射报警信号的发射模块30。用于发射报警信号的发射模块30被设计为当检测到注意力分散情况时发出报警信号。注意力分散情况被理解为意味着例如驾驶员4的至少一只手的位置在允许区域之外(如下所述),或者检测时间的测量值大于预定阈值(也在下文中描述)。
本发明还涉及一种使用上述检测装置10检测车辆1的驾驶员4的注意力分散的方法。
该方法可以有利地用于例如确定驾驶员4是否被他用一只手拿着的物体(例如移动电话)分散注意力。
图3示出了一种用于检测车辆1的驾驶员4的注意力分散的方法的第一示例性实施方式,其以步骤的形式示出。
如图3所示,该方法从步骤E2开始。在该步骤中,图像获取组件22的三维传感器21获取检测区域D的至少一幅图像。所获取的图像特别包含驾驶员4的头部和至少一只手。
在步骤E4中,由处理模块24处理在步骤E2中获取的图像,以便确定驾驶员的姿势。实际上,处理模块24基于所获取的图像(这里是三维图像,如上所述)来确定驾驶员的姿势的表示。换句话说,处理模块24使得能够确定驾驶员4的身体各部分的位置,特别是驾驶员4的头部和至少一只手的位置。
然后,处理模块24基于驾驶员4的姿势的表示,并因此通过对获取的图像的分析,确定他的头部的朝向和他的至少一只手的位置(步骤E6)。
然后,该方法继续步骤E8。在该步骤中,分析模块26使用在步骤E6中确定的手的位置,以确定手是否位于至少一个允许区域中。基于驾驶车辆时手放置的区域来定义手位置的允许区域。例如,在这里,允许区域可以包括变速杆2、方向盘3、用于调节乘客舱的通风的元件或者在驾驶员驾驶时对驾驶员4有用的任何其他驾驶或控制元件。在图1的示例中,驾驶员的左手位于方向盘3上,因此位于如上定义的允许区域内。相比之下,右手握着移动电话20并且不在允许区域内。
在根据本发明的方法中,如果两只手都在允许区域中,则该方法返回到步骤E2。如果两只手中的一只(或两只)位于允许区域之外,则该方法继续步骤E10。
在步骤E10中,分析模块26确定在驾驶员4的头部朝向上可能存在位于允许区域之外的手。换句话说,分析模块26确定驾驶员4的头部是否朝向他的一只手。
如果驾驶员4的头部没有朝向位于允许区域之外的手,则该方法返回到步骤E2。
否则,如图3所示,该方法继续步骤E12。在该步骤中,时间测量模块28测量驾驶员4的头部保持指向他的手的检测时间,也就是说,手位于所确定的朝向上的时间。
然后将该检测时间与预定阈值进行比较(步骤E14)。该预定阈值例如对应于驾驶员4可以将注意力从道路上转移而不危及其安全的最大时间。实际上,这个预定阈值在1秒和3秒之间,例如大约2秒。该预定阈值例如可以取决于车辆1的速度。
如果检测时间小于该预定阈值,则不认为驾驶员的注意力分散,并且该方法返回到步骤E2。
相反,如果检测时间大于或等于预定阈值,则该方法继续步骤E16和E18。在这些步骤中,分析模块26确定驾驶员是否处于驾驶状态。特别地,如果不使用自主驱动单元50或者如果车辆1的速度大于预定速度值,则驾驶员处于驾驶状态。
在步骤E16中,分析模块检查例如自动驾驶单元50是否正在被使用。如果是这样,则不认为驾驶员4从其驾驶中分散了注意力,因为自动驾驶单元正在帮助他。该方法然后返回到步骤E2。
如果没有使用自动驾驶单元50,则该方法继续步骤E18。在步骤E18中,将车辆1的速度与预定速度值进行比较。预定速度值例如非常低;然后,步骤E18可以确定车辆是否静止。如果车辆1的速度小于该预定值,则不认为驾驶员4处于驾驶状态(因此不需要检查他的注意力分散状态)。该方法返回到步骤E2。
如果车辆1的速度大于预定值,则认为驾驶员4处于驾驶状态,注意力不应分散。然后,在步骤E20中,由发射模块30发射报警信号。在检测到驾驶员4的注意力分散之后发射的报警信号例如是特定的,特别是比传统的报警信号(例如在低燃料水平的情况下发出的信号)更紧急。在步骤E20中发出的报警信号例如是在驾驶员没有系好安全带时发出的信号类型,也就是说,间歇信号,其强度和频率增加,直到安全带被系好。这里,报警信号的强度和频率可以增加,直到驾驶员4将注意力从他手中拿着的物体上转移开。
图4示出了一种用于检测车辆1的驾驶员4的注意力分散的方法的第二示例性实施方式,其以步骤的形式示出。
如图4所示,该方法从步骤E42开始。在该步骤中,图像获取组件22的三维传感器21获取检测区域的至少一幅图像。所获取的图像特别包含驾驶员4的头部和至少一只手。同时,图像获取组件22的二维传感器23还获取另一幅图像。该另一图像包含例如驾驶员4的面部。
在步骤E44中,由处理模块24处理在步骤E42中获取的图像,以便确定驾驶员的姿势(以类似于上述步骤E4的方式)。在该步骤E44中,还处理另一图像,以便确定驾驶员4的头部位置和凝视方向(该凝视方向,如已经指出的,是与驾驶员头部相关联的方向的一个示例)。
在步骤E44结束时,处理模块24因此已经确定了驾驶员4的姿势的表示和他的凝视方向。
处理模块24然后基于驾驶员4的姿势的表示来确定他的至少一只手的位置(步骤E46,类似于上述步骤E6)。作为变型,驾驶员4的头部的朝向可以基于驾驶员4的姿势的表示来确定,以便与驾驶员4的凝视方向相结合。
然后,该方法继续步骤E48。在该步骤中,如在步骤E8中一样,分析模块26使用在步骤E46中确定的手的位置,以便确定手是否位于允许区域中。
在根据本发明的方法中,如果两只手都在允许区域中,则该方法返回到步骤E42。如果两只手中的一只(或两只手)位于允许区域之外,则该方法继续步骤E50。
在步骤E50中,分析模块26确定在驾驶员4的头部方向上可能存在位于允许区域之外的手。特别地,分析模块26确定驾驶员4的目光是否朝向他的一只手。这种评估使得对驾驶员4的注意力分散的检测更加准确(与使用头部的朝向相比),因为确定凝视检测使得能够确定驾驶员4的注意力实际上集中在哪里。
如果驾驶员4的视线没有朝向位于允许区域之外的手,则该方法返回到步骤E42。
否则,如图4所示,该方法继续步骤E52。如在步骤E12中一样,时间测量模块28测量驾驶员的头部保持指向他的手的检测时间,也就是说,手位于所确定的凝视方向上的时间。
然后,将该检测时间与预定阈值进行比较(步骤E54)。
如果检测时间小于该预定阈值,则不认为驾驶员的注意力分散,并且该方法返回到步骤E42。
相反,如果检测时间大于或等于预定阈值,则该方法继续步骤E56和E58(类似于步骤E16和E18)。在这些步骤中,分析模块26确定驾驶员是否处于驾驶状态。特别地,如果不使用自主驱动单元50或者如果车辆1的速度大于预定速度值,则驾驶员处于驾驶状态。
在步骤E56中,分析模块检查例如自动驾驶单元50是否正在被使用。如果是这样,不认为驾驶员4从其驾驶中分散了注意力,因为自动驾驶单元正在帮助他。该方法然后返回到步骤E42。
如果没有使用自动驾驶单元50,则该方法继续步骤E58。在步骤E58中,将车辆1的速度与预定速度值进行比较。如果车辆1的速度小于该预定值,则不认为驾驶员4处于驾驶状态(因此不需要检查他的注意力分散状态)。该方法返回到步骤E42。
如果车辆1的速度大于预定值,则认为驾驶员处于驾驶状态,注意力不应分散。然后,正如在上述步骤E20中一样,在步骤E60中由发射模块30发射报警信号。