基于检测算子的滚动轴承甩油故障图像识别方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明属于图像检测技术领域,具体涉及一种滚动轴承甩油故障图像识别方法。
背景技术
在滚动轴承甩油故障检测中,一般采用人工检查图像的方式进行故障检测。采用人工查看图像的方式进行检查仍然存在诸多问题,例如成本高、效率低等问题。而且重复性查看图像工作枯燥,经常会出现遗漏部件、误报等情况,无法保证准确率,从而给铁路货车的安全运行留下安全隐患。
因此,对铁路货车进行自动化故障检测具有重要意义。但是鉴于铁路货车一些部件的特殊性,不适合使用现有的检测技术进行故障检测。在滚动轴承甩油故障检测中,原本滚动轴承甩油就不易被识别,而且目前滚动轴承甩油的故障界定模糊,进一步增加了识别难度。同时货车的轴承图像非常容易受到雨雪、风沙、泥渍和油渍等自然条件的影响,又进一步给滚动轴承甩油故障造成了检测难度。为了解决该问题,已有基于深度学习的技术的轴承甩油故障图像识别,虽然该方法的检测效果比较好,但是该方法需要的准确性也依赖于训练过程所得到的模型的好坏,而训练过程还需要收到训练样本的影响,如果训练样本不能覆盖所有的情况(如天气光照影响、油污影响等),则模型的适用性和检测准确度将会收到严重影响,所以这种方法需要获取非常多的图像,这就需要花费大量的图像手机工作量,而且这种还存在通用性效果不稳定的问题,不同的用户训练得到的模型不一定能够取得同样好的效果。还有就是这种方法需要对训练过程进行调整,进一步增加了工作量和训练难度。
发明内容
本发明的目的是为解决人工检测方法存在遗漏率高、误检率高的问题,以及基于深度学习的检测方法存在工作量大和通用性效果不稳定的问题。
基于检测算子的滚动轴承甩油故障图像识别方法,包括以下步骤:
S1、获取事先建立好的模板数据库,所述模板数据库包括:转向架图像模板数据库、检测区域模板数据库和直方图模板数据库;
S2、根据待检测图像的转向架类型,在直方图模板数据库中提取出相应的直方图模板,进行直方图规定化,即将待检测图像的直方图按照模板直方图进行映射;
S3、根据待检测图像的转向架类型提取转向架图像模板数据库中的转向架模板图像,将提取的转向架模板图像进行特征点提取与S2处理后的待检测图像进行特征点匹配;使用匹配后特征点计算出待检测图像的仿射变换矩阵,利用仿射变换矩阵将待检测图像变换到同转向架模板图像相同尺度的大小;
S4、分别建立均值检测算子、环形检测算子、水平检测算子、竖直检测算子、斜45度和斜135度检测算子;检测算子为尺度可变算子;
S5、针对于待检测图像,遍历所有像素点,将待检测像素点与检测算子的中心点重合,计算检测算子与图像相乘的和,作为检测算子的积分值,利用检测算子的积分值确定甩油点;基于甩油点确定待检测图像是否指示甩油故障。
进一步地,S5所述遍历所有像素点,将待检测像素点与检测算子的中心点重合的过程是针对于待检测图像中的检测区域进行的。
进一步地,所述检测区域的确定过程包括以下步骤:
将待检测图像按照转向架图像模板数据库中的照转向架图像模板大小进行尺度变换后;检测区域模板中的白色像素区域即为检测区域,确定待检测图像中相对应的位置为待检测图像的检测区域;
检测区域模板数据库的检测区域模板是将转向架图像模板中的待检测区域做标记,形成二值图像,其中灰度值为255的为需要检测的像素点,灰度值为0的为非检测像素点。
进一步地,检测算子为尺度可变算子,且检测算子的尺度为奇数,均值检测算子尺度记为N,均值检测算子中每个点的值为:1/(N*N);
所有检测算子的尺度以均值检测算子的尺度为标准,将均值检测算子记为J,Q为同均值检测算子尺度相等的算子;针对于环形检测算子、水平检测算子、竖直检测算子、斜45度检测算子、斜135度检测算子:
环形检测算子:
水平检测算子:
竖直检测算子:
斜45度检测算子:
斜135度检测算子:
进一步地,所述均值检测算子尺度N最小为3像素,最大为待检测图像高度的0.2倍像素。
进一步地,S5所述的检测算子的积分值如下:
其中,K为检测算子,I为待检测图像,I'为结果图像,S为检测算子的半径大小,其尺度大小为2×S+1;
通过此公式计算的值,称为检测算子的积分值,通过对此积分值的判断,可确定是否为甩油点。
进一步地,S5所述利用检测算子的积分值确定甩油点的过程包括以下步骤:
S5.1:定义检测算子尺度为3像素;
S5.2:计算均值检测算子积分值V_MEAN;
S5.3:计算环形检测算子积分值V_ROUND;
S5.4:计算水平和竖直检测算子积分值V_HORI和V_VERT;
S5.5:计算斜45度和135度检测算子积分值V_TILT1和V_TILT2;
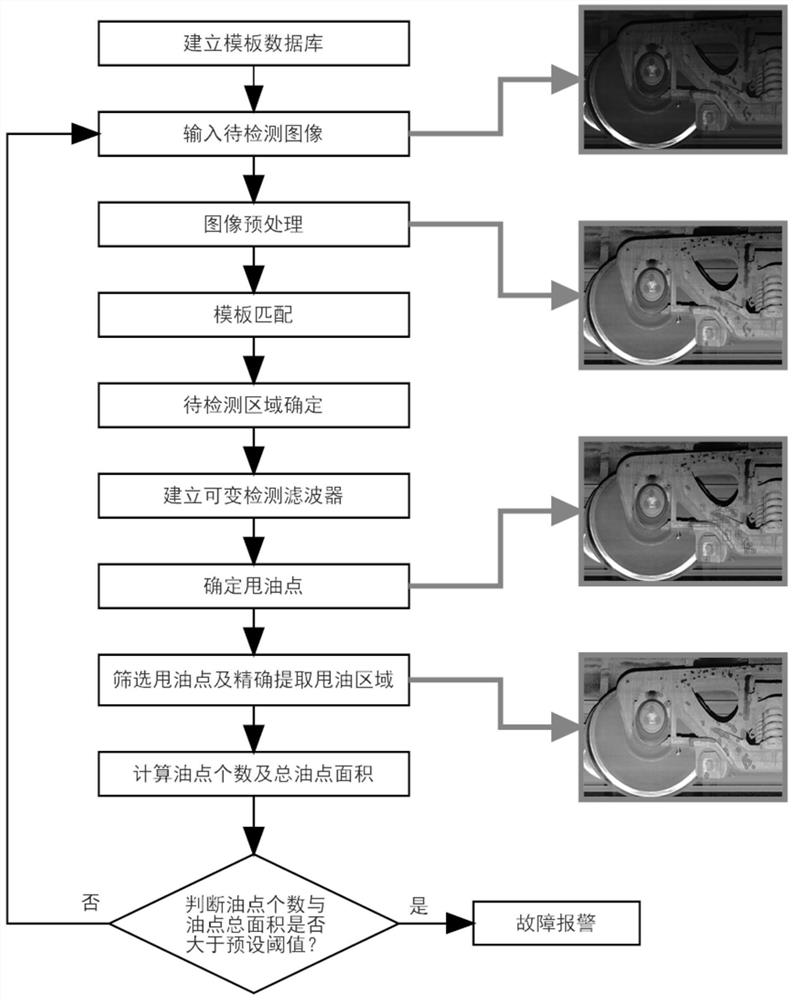
S5.6:若V_MEAN 进一步地,S2所述将待检测图像的直方图按照模板直方图进行映射的过程包括以下步骤: 分别计算待检测图像的累计直方图概率函数和直方图模板图像的累计直方图概率密度函数,按照两个累计概率密度函数中差值最小的关系进行提取映射列表,最后将待检测图像按照此映射列表进行规定化。 进一步地,所述基于甩油点确定待检测图像是否指示甩油故障的过程中需要对确定的甩油点进行筛选,具体过程包括以下步骤: 利用检测算子的积分值确定甩油点后,在确定的甩油点中,记录每个甩油点的检测算子的尺度,在检测算子尺度范围内,统计检测算子尺度范围区域所有像素点的灰度值,根据大津阈值法,计算甩油区域二值化的阈值,根据此阈值将该区域分成低灰度区域和高灰度区域,再通过形态学操作,得到一个连通的低阈值区域和连通的高阈值区域;比较低阈值区域和高阈值区域的平均灰度值,如果两个区域的平均灰度值差大于阈值HTR_DIFF,则认为检测算子尺度范围内存在甩油点,则该低阈值区域为甩油区域;否则剔除检测算子的尺度内的甩油点。 进一步地,基于甩油点确定待检测图像是否指示甩油故障的过程包括以下步骤: 基于筛选甩油点过程中得到的甩油点及甩油区域,统计待检测图像中所有甩油点的个数T_NUM,以及所有甩油区域的总面积T_AREA;THR_NUM和THR_AREA为设定的油点个数和甩油总面积的阈值;若同时满足T_NUM>THR_NUM和T_AREA>THR_AREA,则认为待检测图像指示甩油故障。 本发明的有益效果是: 1、本发明利用图像实现自动识别,相比人工检测,能够极大地提高检测效率、准确率。 2、本发明采用直方图规定化算法,将图像灰度范围调整至统一范围内,从而去除由图像亮暗变化导致的甩油识别干扰,而此部分的关键在于模板直方图是超过100张以上的无甩油图像的直方图累积叠加再平均的效果,这样可以平衡各种噪声的干扰,提高灰度调整效果。 3、本发明为每种转向架类型制定检测范围模板,根据模板匹配算法,确定检测范围,能够提高检测精度,从而保证了检测的准确率。 4、本发明利用不同尺度检测算子可识别不同规格大小的油渍,能够有效地减少油渍的漏检、误检。 5、本发明根据检测到的甩油油渍个数及面积来确定是否为滚动轴承甩油,从而对轴承甩油故障进行量化了,解决以往判读是否为滚动轴承甩油故障模糊界定。 6、相比基于深度学习的检测方法,本发明可以及大地减少工作量,而且通用性效果稳定。 附图说明 图1为基于检测算子的铁路货车滚动轴承甩油故障图像识别流程图; 图2为K2型转向架的模板数据库;其中图2a为转向架模板图像,图2b为检测区域模板,图2c为直方图模板。 具体实施方式 需要特别说明的是,在不冲突的情况下,本申请公开的实施例之间可以相互组合。 具体实施方式一: 本实施方式所述的基于检测算子的滚动轴承甩油故障图像识别方法,用于对铁路货车滚动轴承甩油故障图像识别,包括以下步骤: S1、获取事先建立好的模板数据库,所述模板数据库包括:转向架图像模板数据库、检测区域模板数据库和直方图模板数据库; S2、根据待检测图像的转向架类型,在直方图模板数据库中提取出相应的直方图模板,进行直方图规定化,即将待检测图像的直方图按照模板直方图进行映射; S3、根据待检测图像的转向架类型提取转向架图像模板数据库中的转向架模板图像,将提取的转向架模板图像进行特征点提取与S2处理后的待检测图像进行特征点匹配;使用匹配后特征点计算出待检测图像的仿射变换矩阵,利用仿射变换矩阵将待检测图像变换到同转向架模板图像相同尺度的大小; S4、分别建立均值检测算子、环形检测算子、水平检测算子、竖直检测算子、斜45度和斜135度检测算子;检测算子为尺度可变算子; S5、针对于待检测图像,遍历所有像素点,将待检测像素点与检测算子的中心点重合,计算检测算子与图像相乘的和,作为检测算子的积分值,利用检测算子的积分值确定甩油点;基于甩油点确定待检测图像是否指示甩油故障。 具体实施方式二: 本实施方式所述的基于检测算子的滚动轴承甩油故障图像识别方法,用于对铁路货车滚动轴承甩油故障图像识别,包括以下步骤: 步骤1、建立模板数据库: 模板数据库包括3部分:转向架图像模板数据库、检测区域模板数据库和直方图模板数据库。以图2为例进行说明,图2为K2型转向架的模板数据库;其中图2a为图像模板,图2b为检测区域模板图2c为直方图模板。 转向架图像模板数据库是收集图像质量较好(转向架无泥渍、污渍、水渍,亮暗适中)且无甩油的侧部转向架图像,例如K2型转向架、K3型转向架、K4型转向架、K5型转向架、K6型转向架、Z8AB型转向架、Z8B型转向架和Z8型转向架等侧部转向架图像,本实施方式中每个转向架图像收集1张。 检测区域模板数据库是在转向架图像模板数据库基础上,将转向架图像模板数据库中的待检测区域做标记,形成二值图像,其中灰度值为255的为需要检测的像素点,灰度值为0的为非检测像素点。 直方图模板数据库同样是在转向架图像模板数据库的基础上,针对于每个类型的转向架,再收集超过100张无甩油故障的正常图像,将所有该类型的转向架图像的直方图全部叠加平均,得到该类型的直方图模板。将转向架图像模板数据库中的全部转向架类型的直方图统计后,最终形成直方图模板数据库。 步骤2、图像预处理: 由于货车图像的拍摄时间不同、受噪声等因素的干扰不同,导致待识别图像的整体亮暗度会不同。为均衡这种不同采用直方图规定化算法进行图像预处理。根据待检测图像的转向架类型,在直方图模板数据库中提取出相应的直方图模板,直方图规定化就是将待检测图像的直方图按照模板直方图进行映射,最后待检测图像的直方图形状将和模板直方图的形状相同;即:分别计算待检测图像的累计直方图概率函数和直方图模板图像的累计直方图概率密度函数,按照两个累计概率密度函数中差值最小的关系进行提取映射列表,最后将待检测图像按照此映射列表进行规定化即可实现平衡亮度不同带来的干扰。 在直方图规定化后,为了实现资源的可复制性,将转向架图像平分成左图像和右图像,将左图像/右图像进行水平翻转,由于左右图像的对称性,翻转后的左图像/右图像在结构上同右图像/左图像相似,此时左右图像可分别使用步骤3至6进行甩油故障检测;也可以直接使用转向架图像使用步骤3至6进行甩油故障检测。 步骤3、模板匹配: 根据待检测图像的转向架类型提取转向架图像模板数据库中的转向架模板图像。首先,将预处理后的待检测图像与转向架模板图像进行特征提取,可使用SURF特征点(或者角点)检测算法进行特征点提取。其次,对提取出的特征点,采用最近欧式距离方法进行特征点匹配。最后,使用匹配后特征点计算出待检测图像的仿射变换矩阵,将待检测图像变换到同转向架模板图像相同尺度的大小。 步骤4、待检测区域确定: 将待检测图像按照转向架图像模板数据库中的图像模板大小进行尺度变换,由于图像模板的图像尺度与检测区域模板的尺度是相等的,所以此时待检测图像与检测区域模板尺度相等。检测区域模板中的白色像素区域即为检测区域,即确定了待检测图像中检测区域。在检测区域中进行油点检测有两点好处,一是可以提高油点检测效率,二是可去除一些非甩油区域的干扰。 步骤5、建立可变检测滤波器: 为检测不同形状的油点,分别建立均值检测算子、环形检测算子、水平检测算子、竖直检测算子、斜45度和斜135度检测算子;检测算子的尺度大小是可变的,即检测算子为尺度可变算子,算子的尺度必须是奇数,也就是每次增长需按照偶数进行叠加。尺度的大小指的是均值检测算子的大小,定义尺度大小为N,确定最小尺度为3像素,最大尺度为检测区域图像高度的0.2倍像素。 算子的可变规则如下: 均值检测算子中每个点的值为:1/(N*N); 例如尺度为3的均值检测算子: 例如尺度为5的均值检测算子: 针对于环形检测算子、水平检测算子、竖直检测算子、斜45度检测算子、斜135度检测算子:将均值检测算子记为J,Q为同均值检测算子尺度相等的算子; 环形检测算子: 针对于环形检测算子、水平检测算子、竖直检测算子、斜45度检测算子、斜135度检测算子,尺度大小指的是最里面的均值检测算子的大小,即举例中的3*3,所以尺度为3的环形检测算子大小为9*9,是因为环形检测算子是在均值检测算子的周围添加了8个3*3的算子,最终形成的环形检测算子(在均值检测算子周围形成一个环形,即为“环形检测算子”),所以最终是9*9大小的。 例如尺度为3的环形检测算子如下:
水平检测算子: 尺度为3的水平检测算子:
竖直检测算子: 尺度为3的竖直检测算子:
斜45度检测算子: 尺度为3的斜45度检测算子:
斜135度检测算子: 尺度为3的斜135度检测算子:
上述检测算子是经过研究和试验最终确定的,在利用上述检测算子进行滤波,能够有效的确定甩油点,从而极大地提高检测的准确率。 步骤6、确定甩油点: 在待检测区域中,遍历所有待检测区域中所有像素点,将待检测像素点与检测算子的中心点重合,计算检测算子与图像相乘的和,如下公式所示:
其中,K为检测算子,I为待检测图像,I'为结果图像,S为检测算子的半径大小,其尺度大小为2×S+1。 通过此公式计算的值,称为检测算子的积分值,通过对此积分值的判断,可确定是否为甩油点,具体判断步骤如下: 第6.1步:定义检测算子尺度为3像素; 第6.2步:计算均值检测算子积分值V_MEAN; 第6.3步:计算环形检测算子积分值V_ROUND; 第6.4步:计算水平和竖直检测算子积分值V_HORI和V_VERT; 第6.5步:计算斜45度和135度检测算子积分值V_TILT1和V_TILT2; 第6.6步:若V_MEAN 利用检测算子的积分值确定甩油点;基于甩油点确定待检测图像是否指示甩油故障。 具体实施方式三:结合图1说明本实施方式。 在以往的滚动轴承甩油故障检测中,通常依赖于人的经验作为是否甩油的标准,这样就促使判断一幅图像是否为滚动轴承甩油故障的界限变得特别模糊。本发明通过精准检测油点,并计算检测到的油点个数与总面积,通过设定的阈值THR_NUM和THR_AREA,当检测油点个数>THR_NUM,检测油点总面积时>THR_AREA,则认为是甩油。通过调整阈值THR_NUM和THR_AREA,则可检测不同程度的甩油。 本实施方式所述的基于检测算子的滚动轴承甩油故障图像识别方法,用于对铁路货车滚动轴承甩油故障图像识别,包括以下步骤: 步骤1、建立模板数据库: 模板数据库包括3部分:转向架图像模板数据库、检测区域模板数据库和直方图模板数据库。以图2为例进行说明,图2为K2型转向架的模板数据库;其中图2a为图像模板,图2b为检测区域模板图2c为直方图模板。 转向架图像模板数据库是收集图像质量较好(转向架无泥渍、污渍、水渍,亮暗适中)且无甩油的侧部转向架图像,例如K2型转向架、K3型转向架、K4型转向架、K5型转向架、K6型转向架、Z8AB型转向架、Z8B型转向架和Z8型转向架等侧部转向架图像,本实施方式中每个转向架图像收集1张。 检测区域模板数据库是在转向架图像模板数据库基础上,将转向架图像模板数据库中的待检测区域做标记,形成二值图像,其中灰度值为255的为需要检测的像素点,灰度值为0的为非检测像素点。 直方图模板数据库同样是在转向架图像模板数据库的基础上,针对于每个类型的转向架,再收集超过100张无甩油故障的正常图像,将所有该类型的转向架图像的直方图全部叠加平均,得到该类型的直方图模板。将转向架图像模板数据库中的全部转向架类型的直方图统计后,最终形成直方图模板数据库。 步骤2、图像预处理: 由于货车图像的拍摄时间不同、受噪声等因素的干扰不同,导致待识别图像的整体亮暗度会不同。为均衡这种不同采用直方图规定化算法进行图像预处理。根据待检测图像的转向架类型,在直方图模板数据库中提取出相应的直方图模板,直方图规定化就是将待检测图像的直方图按照模板直方图进行映射,最后待检测图像的直方图形状将和模板直方图的形状相同;即:分别计算待检测图像的累计直方图概率函数和直方图模板图像的累计直方图概率密度函数,按照两个累计概率密度函数中差值最小的关系进行提取映射列表,最后将待检测图像按照此映射列表进行规定化即可实现平衡亮度不同带来的干扰。 在直方图规定化后,为了实现资源的可复制性,将转向架图像平分成左图像和右图像,将左图像/右图像进行水平翻转,由于左右图像的对称性,翻转后的左图像/右图像在结构上同右图像/左图像相似,此时左右图像可分别使用步骤3至8进行甩油故障检测;也可以直接使用转向架图像使用步骤3至8进行甩油故障检测。 步骤3、模板匹配: 根据待检测图像的转向架类型提取转向架图像模板数据库中的转向架模板图像。首先,将预处理后的待检测图像与转向架模板图像进行特征提取,可使用SURF特征点(或者角点)检测算法进行特征点提取。其次,对提取出的特征点,采用最近欧式距离方法进行特征点匹配。最后,使用匹配后特征点计算出待检测图像的仿射变换矩阵,将待检测图像变换到同转向架模板图像相同尺度的大小。 步骤4、待检测区域确定: 将待检测图像按照转向架图像模板数据库中的图像模板大小进行尺度变换,由于图像模板的图像尺度与检测区域模板的尺度是相等的,所以此时待检测图像与检测区域模板尺度相等。检测区域模板中的白色像素区域即为检测区域,即确定了待检测图像中检测区域。在检测区域中进行油点检测有两点好处,一是可以提高油点检测效率,二是可去除一些非甩油区域的干扰。 步骤5、建立可变检测滤波器: 为检测不同形状的油点,分别建立均值检测算子、环形检测算子、水平检测算子、竖直检测算子、斜45度和斜135度检测算子;检测算子的尺度大小是可变的,即检测算子为尺度可变算子,算子的尺度必须是奇数,也就是每次增长需按照偶数进行叠加。尺度的大小指的是均值检测算子的大小,定义尺度大小为N,确定最小尺度为3像素,最大尺度为检测区域图像高度的0.2倍像素。 算子的可变规则如下: 均值检测算子中每个点的值为:1/(N*N); 例如尺度为3的均值检测算子: 例如尺度为5的均值检测算子: 针对于环形检测算子、水平检测算子、竖直检测算子、斜45度检测算子、斜135度检测算子:将均值检测算子记为J,Q为同均值检测算子尺度相等的算子; 环形检测算子: 针对于环形检测算子、水平检测算子、竖直检测算子、斜45度检测算子、斜135度检测算子,尺度大小指的是最里面的均值检测算子的大小,即举例中的3*3,所以尺度为3的环形检测算子大小为9*9,是因为环形检测算子是在均值检测算子的周围添加了8个3*3的算子,最终形成的环形检测算子(在均值检测算子周围形成一个环形,即为“环形检测算子”),所以最终是9*9大小的。 例如尺度为3的环形检测算子如下:
水平检测算子: 尺度为3的水平检测算子:
竖直检测算子: 尺度为3的竖直检测算子:
斜45度检测算子: 尺度为3的斜45度检测算子:
斜135度检测算子: 尺度为3的斜135度检测算子:
上述检测算子是经过研究和试验最终确定的,在利用上述检测算子进行滤波,能够有效的确定甩油点,从而极大地提高检测的准确率。 步骤6、确定甩油点: 在待检测区域中,遍历所有待检测区域中所有像素点,将待检测像素点与检测算子的中心点重合,计算检测算子与图像相乘的和,如下公式所示:
其中,K为检测算子,I为待检测图像,I'为结果图像,S为检测算子的半径大小,其尺度大小为2×S+1。 通过此公式计算的值,称为检测算子的积分值,通过对此积分值的判断,可确定是否为甩油点,具体判断步骤如下: 第6.1步:定义检测算子尺度为3像素; 第6.2步:计算均值检测算子积分值V_MEAN; 第6.3步:计算环形检测算子积分值V_ROUND; 第6.4步:计算水平和竖直检测算子积分值V_HORI和V_VERT; 第6.5步:计算斜45度和135度检测算子积分值V_TILT1和V_TILT2; 第6.6步:若V_MEAN 步骤7、筛选甩油点及提取甩油区域: 在确定的甩油点中,记录每个甩油点的检测算子的尺度,在检测算子尺度范围内,统计检测算子尺度范围区域所有像素点的灰度值,根据大津阈值法,计算甩油区域二值化的阈值,根据此阈值将该区域分成低灰度区域和高灰度区域,再通过形态学操作,得到一个连通的低阈值区域和连通的高阈值区域;比较低阈值区域和高阈值区域的平均灰度值,如果两个区域的平均灰度值差大于阈值HTR_DIFF,则认为检测算子尺度范围内存在甩油点,则该低阈值区域为甩油区域,进行保存;否则剔除检测算子的尺度内的甩油点。 步骤8、计算油点个数及总油点面积: 基于检测到的甩油点及甩油区域,统计待检测图像中所有甩油点的个数T_NUM,以及所有甩油区域的总面积T_AREA;THR_NUM和THR_AREA为设定的油点个数和甩油总面积的阈值;若同时满足T_NUM>THR_NUM和T_AREA>THR_AREA,则认为待检测图像指示甩油故障。 本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 基于检测算子的滚动轴承甩油故障图像识别方法
- 一种基于图像识别的滚动轴承甩油故障检测方法