一种具有运动分岔特性并联机构
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及机构学及机器人技术领域,特别是涉及一种具有运动分岔特性并联机构。
背景技术
机构学研究领域在传统上来说主要研究具有固定自由度特性的并联机构。其具有刚度大、承载能力大、微动精度高、运动负荷小等特点。目前并联机器人广泛应用在工业机器人、运动模拟器、姿态控制器、医疗机器人、虚拟轴机床、3D打印等方面。
但是伴随着科技的发展,在工业生产、医疗康复、宇宙探索等多个领域,需要应用多功能、多操作模式、能根据作业环境变化的可重构运动模式。在此背景下,学者们对可重构并联机构研究逐渐加深,可重构并联机构主要分为两种类型,主要包括运动分岔并联机构和变胞并联机构,学者们通过设计变胞运动副、多模式单元、可锁死关节、支链间内约束奇异、具有运动分岔特性的单环闭链等设计了一系列可重构并联机构,但是目前这种多运动模式并联机构仍然较少。
发明内容
本发明针对现有的可重构并联机构较少的不足,提供一种新型运动分岔并联机器人机构,其具有两种不同运动模式。
为实现上述目的,本发明提供了如下方案:
本发明提供一种具有运动分岔特性并联机构,包括定平台、动平台以及设置于所述定平台与所述动平台之间的两条第一支链、一条第二支链和一条第三支链;所述定平台的两侧分别与一所述第一支链的底端相连接,所述动平台的两侧分别与一所述第一支链的顶端相连接;所述定平台的一端与所述第二支链的底端相连接,所述动平台的一端与所述第二支链的顶端相连接;所述定平台的另一端与所述第三支链的底端相连接,所述动平台的另一端与所述第三支链的顶端相连接。
可选的,所述定平台为正方形板状平台,所述动平台为十字型板状平台。
可选的,所述第一支链包括第一连杆和第二连杆;所述第一连杆底端与所述定平台通过一第一圆柱副相连接,所述第一连杆顶端通过一第一转动副与所述第二连杆的底端相连接,所述第二连杆的顶端通过一第二圆柱副与所述动平台相连接。
可选的,所述第一圆柱副的轴线与所述第一转动副的轴线相平行,所述第一圆柱副的轴线与所述第二圆柱副的轴线相垂直。
可选的,所述两条第一支链中其中一条第一支链中的所述第一圆柱副为驱动副。
可选的,所述第二支链包括第三连杆和第四连杆;所述第三连杆底端通过一第一移动副与所述定平台相连接,所述第三连杆的顶端通过一第一虎克铰与所述第四连杆的底端相连接;所述第四连杆的顶端通过一第一球铰与所述动平台相连接。
可选的,所述第三支链包括第五连杆和第六连杆;所述定平台的另一端中部设置有一第二转动副,所述第二转动副与一第三转动副相连接,所述第二转动副与所述第三转动副组成一个虎克铰,所述第五连杆底端于所述第二转动副相连接,所述第五连杆顶端通过一第四转动副与所述第六连杆的底端相连接,所述第六连杆的顶端通过一第五转动副相连接。
可选的,所述第二转动副和第三转动副为驱动副。
可选的,所述第四转动副的轴线、所述第五转动副的轴线均与所述第三转动副的轴线相平行。
本发明相对于现有技术取得了以下技术效果:
本发明中的具有运动分岔特性并联机构,在初始位形动平台与定平台平行且第二转动副与定平台平行时具有两个转动自由度和两个移动自由度,当第三支链中只驱动第二转动副时,第三支链受到两个线性无关的约束力限制,此时机构只具有2R1T运动模式;恢复至初始位形后,当第三支链中只驱动第三转动副时,第三支链受到一个约束力和一个约束力偶,此时机构只具有2T1R运动模式。为实现动平台完全可控,机构采有4个驱动器进行冗余驱动,从而提高了系统的刚度、容错性、驱动的稳定性,增大了承载能力,改善了驱动器负载状况,避免出现单个驱动过载情况,提高力传递性能;运动分岔并联机器人机构是以改变并联机构的自由度数目和自由度性质为目的,从而适应不同作业任务需求,克服了传统并联机器人固定自由度和单一运动模式。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
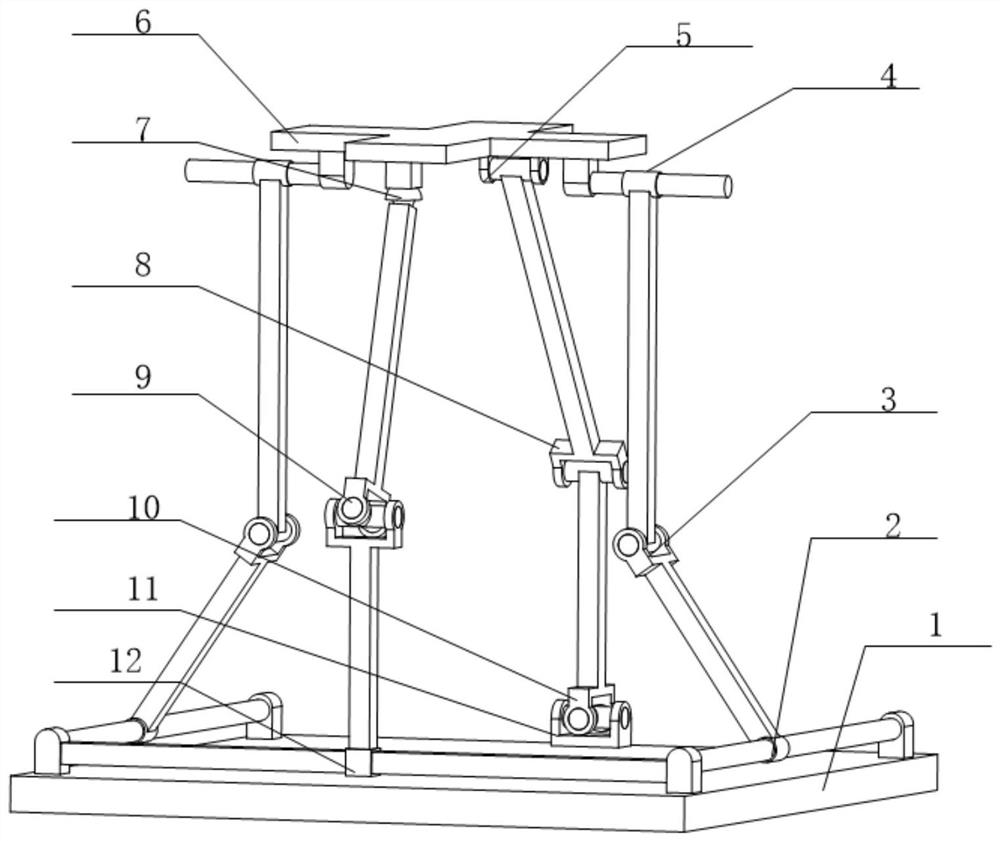
图1是本发明的运动分岔并联机构初始位形结构示意图。
图2是本发明的运动分岔并联机构2T1R模式结构示意图。
图3是本发明的运动分岔并联机构2R1T模式结构示意图。
图中:1、定平台,2、第一圆柱副,3、第一转动副,4、第二圆柱副,5、第五转动副,6、动平台,7、第一球副,8、第四转动副,9、第一虎克铰,10、第二转动副,11、第三转动副,12、第一移动副。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至3所示,本实施例提供一种具有运动分岔特性并联机构,包括定平台1、动平台6以及设置于所述定平台1与所述动平台6之间的两条第一支链、一条第二支链和一条第三支链;所述定平台1的两侧分别与一所述第一支链的底端相连接,所述动平台6的两侧分别与一所述第一支链的顶端相连接;所述定平台1的一端与所述第二支链的底端相连接,所述动平台6的一端与所述第二支链的顶端相连接;所述定平台1的另一端与所述第三支链的底端相连接,所述动平台6的另一端与所述第三支链的顶端相连接。
于本具体实施例中,所述定平台1为正方形板状平台,所述动平台6为十字型板状平台。
所述第一支链包括第一连杆和第二连杆;所述第一连杆底端与所述定平台1通过一第一圆柱副2相连接,所述第一连杆顶端通过一第一转动副3与所述第二连杆的底端相连接,所述第二连杆的顶端通过一第二圆柱副4与所述动平台6相连接。
所述第一圆柱副2的轴线与所述第一转动副3的轴线相平行,所述第一圆柱副2的轴线与所述第二圆柱副4的轴线相垂直。
所述两条第一支链中其中一条第一支链中的所述第一圆柱副2为驱动副。
所述第二支链包括第三连杆和第四连杆;所述第三连杆底端通过一第一移动副12与所述定平台1相连接,所述第三连杆的顶端通过一第一虎克铰9与所述第四连杆的底端相连接;所述第四连杆的顶端通过一第一球铰与所述动平台6相连接。
所述第三支链包括第五连杆和第六连杆;所述定平台1的另一端中部设置有一第二转动副10,所述第二转动副10与一第三转动副11相连接,所述第二转动副10与所述第三转动副11组成一个虎克铰,所述第五连杆底端于所述第二转动副10相连接,所述第五连杆顶端通过一第四转动副8与所述第六连杆的底端相连接,所述第六连杆的顶端通过一第五转动副5相连接。
所述第二转动副10和第三转动副11为驱动副。
所述第四转动副8的轴线、所述第五转动副5的轴线均与所述第三转动副11的轴线相平行。
第一移动副12的轴线与第一圆柱副2的轴线相垂直。
如图2所示,当锁死第二转动副10,第三转动副11发生转动时,第三支链受到一个约束力和一个约束力偶,此时动平台6受到一个约束力和两个线性无关的约束力偶,机构具有2T1R工作模式。
如图3所示,当锁死第三转动副11,第二转动副10发生转动时,第三支链受到两个线性无关的约束力,此时动平台6受到两个线性无关的约束力和一个约束力偶,机构具有2R1T工作模式。
需要说明的是,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
本说明书中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种具有2R1T与2T1R运动分岔特性并联机构
- 一种具有2R1T与2T1R运动分岔特性并联机构