外科可视化系统和相关方法
文献发布时间:2023-06-19 09:33:52
技术领域
本文公开了例如用于在外科手术(包括微创脊柱手术)期间提供可视化的外科可视化系统和相关方法。
背景技术
存在许多可能期望为外科医生或其他使用者提供手术部位的可视化的情况。虽然已经开发出多个外科可视化系统,但它们通常笨重且使用起来麻烦,难以清洁或消毒,或者具有使得它们不足以或不可能用于许多类型的手术的特性。例如,脊柱内窥镜通常仅用于有限的手术,诸如椎间盘突出修复以及缩小到可预测的非常小位置的其他病理。此类装置通常需要具有低输出力和组织处理能力的非常小的专用工具。此类装置可能需要多个操作人员,其中助手或其他使用者握持并操作可视化系统,同时外科医生使用两只手来执行外科手术。此外,此类装置可能具有陡峭的学习曲线,因为可视化取向可由器械取向决定,并且因此可在手术过程中不断变化。
发明内容
本文公开了例如用于在外科手术期间提供可视化的外科可视化系统和相关方法。本文的系统和方法可用于宽泛范围的外科手术中,包括脊柱外科手术,诸如微创融合或椎间盘切除术。本文的系统和方法可包括用于增强最终用户体验、改善临床结果或降低外科手术侵入性的各种特征结构。示例性特征结构可包括入口集成、免手持操作、主动和/或被动镜头清洁、可调节的相机深度以及许多其他特征结构。
在一些实施方案中,外科系统可包括:进入装置,该进入装置具有工作通道和可视化通道;以及可视化系统,该可视化系统至少部分地设置在可视化通道中,该可视化系统包括相机模块和其中安装有相机模块的壳体。
相机模块可包括图像传感器和被构造成将反射光引导到图像传感器上的镜头,图像传感器和镜头设置在壳体内。相机模块可包括光纤,该光纤具有设置在壳体内的远侧端部以及与光源光学连通的近侧端部。镜头可设置在镜头筒的镜头管腔内,并且光纤可设置在镜头筒的照明管腔中。照明管腔可被设置成比镜头管腔更靠近进入装置工作通道的中心。镜头筒可包括相对于工作通道的中心纵向轴线倾斜地成角度的面向远侧的表面。系统可包括漫射体,该漫射体安装在形成于光纤上方的镜头筒的面向远侧的表面中的凹陷部中。凹陷部可为新月形的并且可基本上沿循镜头管腔的周边。镜头的中心区域可涂覆有疏水性涂层,并且镜头的周边区域可涂覆有亲水性涂层。
壳体可包括主体和远侧端盖。主体可包括相机管腔以及第一流体管腔和第二流体管腔,相机模块设置在相机管腔中。相机管腔可居中设置在主体中,位于第一流体管腔与第二流体管腔之间。主体的面向远侧的表面和端盖的面向远侧的表面可相对于工作通道的中心纵向轴线倾斜地成角度。主体可具有侧壁,该侧壁具有与工作通道相邻设置的凹形内表面以及与内表面相对设置的凸形外表面。主体的侧壁的内表面可限定工作通道的内表面的至少一部分。侧壁的外表面可包括由限定圆柱体的节段的中心过渡区域连接的第一平面区域和第二平面区域,过渡区域沿循主体的相机管腔的外周边。内表面可为凹形弯曲的并且通过限定相应圆柱体的节段的第一过渡区域和第二过渡区域连接到外表面,第一过渡区域和第二过渡区域沿循形成于主体中的第一流体管腔和第二流体管腔的外周边。壳体可由内部圆形管形成,该内部圆形管设置在外部椭圆形管内并且附接到该外部椭圆形管,以限定相机管腔以及第一流体管腔和第二流体管腔。壳体可由内部圆形管形成,该内部圆形管具有附接到其的相对的第一外壳和第二外壳,以限定相机管腔以及第一流体管腔和第二流体管腔。端盖可包括与相机模块的镜头轴向对准的切口以及与相机模块的照明系统轴向对准的切口。端盖的面向近侧的表面可限定凹陷部,该凹陷部被构造成引导流体跨过相机模块的镜头流出壳体的第一流体管腔并流入壳体的第二流体管腔中。凹陷部可包括与第一流体管腔和第二流体管腔轴向对准的外侧端部部分以及对端盖的切口敞开的内侧端部部分。
系统可包括从壳体延伸的连接器组件,该连接器组件包括到相机模块的电连接和光学连接以及到壳体的流体连接。连接器组件可具有与壳体的外部形状匹配的外部形状。系统可包括具有电子显示器的控制器,该电子显示器被构造成显示由相机模块的图像传感器捕获的图像数据。可视化通道可与工作通道相交或重叠。壳体和相机模块可能够相对于进入装置轴向平移。可视化通道可具有从工作通道的中心纵向轴线径向向外设置的中心纵向轴线。
进入装置可包括被构造成将可视化系统相对于进入装置选择性地保持在期望位置的配合特征结构。配合特征结构可包括被构造成接收可视化系统的一部分以限制可视化系统相对于进入装置的移动的锁定轨道。锁定轨道可形成于进入装置的近侧延伸部中。锁定轨道可以按扣配合或摩擦配合接收可视化系统。配合特征结构可包括被构造成接收可视化系统的至少一部分以允许可视化系统相对于进入装置的移动的调节轨道。可视化系统可被构造成使得可视化系统可通过将其从可视化通道的中心纵向轴线径向向外移动而加载到锁定轨道中。锁定轨道可远离可视化通道的中心纵向轴线弯曲或倾斜地成角度。可视化系统可被构造成使得可视化系统可在沿可视化系统的连接器组件的任何点处固定到配合特征结构。配合特征结构可包括轮,该轮在旋转时相对于进入装置推进或回缩可视化系统。配合特征结构可包括被构造成将可视化系统相对于进入装置选择性地锁定在固定位置的卷簧夹具。配合特征结构可包括围绕可视化系统的一部分设置的O形环和可移动地联接到进入装置的锥体,该锥体可在第一位置与第二位置之间移动,在第一位置,锥体使O形环伸展以允许可视化系统相对于进入装置移动,在第二位置,O形环被释放以夹持到可视化系统上并且防止可视化系统相对于进入装置移动。
系统可包括可穿过进入装置的工作通道插入的套管,该套管具有外径和可移动地联接到套管的灯泡形部,该灯泡形部可在第一位置与第二位置之间移动,在第一位置,灯泡形部完全设置在套管的外径内,在第二位置,灯泡形部的至少一部分从套管的外径突出。处于第二位置的灯泡形部可被构造成填充进入装置内的进入装置的可视化通道远侧的空隙空间。灯泡形部可包括面向远侧的表面,该面向远侧的表面是弯曲的或倾斜的,以在穿过套管插入的圆柱形扩张器与进入装置的外表面之间形成逐渐过渡。灯泡形部可通过相对于进入装置轴向地平移套管而可在第一位置与第二位置之间移动。灯泡形部可通过相对于进入装置旋转套管而可在第一位置与第二位置之间移动。灯泡形部可朝向第二位置偏压。进入装置可包括在其远侧端部处的过渡部分,该过渡部分可在第一位置与第二位置之间移动,在第一位置,过渡部分径向向内延伸以在穿过工作通道插入的圆柱形扩张器与进入装置的外表面之间提供逐渐过渡,在第二位置,过渡部分从第一位置径向向外移动。系统可包括扩张轴,该扩张轴可穿过进入装置插入以将过渡部分移动到第二位置。过渡部分可包括多个柔性且弹性的指状部。
在一些实施方案中,可视化系统可包括:相机模块,该相机模块具有图像传感器和镜头;以及其中设置有相机模块的壳体,该壳体具有主体、第一流体通道和第二流体通道以及端盖,该端盖被构造成引导流体流跨过相机模块的镜头流过通道。
相机模块可包括光纤,该光纤具有设置在壳体内的远侧端部以及与光源光学连通的近侧端部。镜头可设置在镜头筒的镜头管腔内,并且光纤可设置在镜头筒的照明管腔中。系统可包括漫射体,该漫射体安装在形成于光纤上方的镜头筒的面向远侧的表面中的凹陷部中。凹陷部可为新月形的并且可基本上沿循镜头管腔的周边。镜头的中心区域可涂覆有疏水性涂层,并且镜头的周边区域可涂覆有亲水性涂层。
相机模块可居中设置在主体中,位于第一流体通道与第二流体通道之间。主体的面向远侧的表面和端盖的面向远侧的表面可相对于相机模块的中心纵向轴线倾斜地成角度。主体可具有外表面,该外表面包括由限定圆柱体的节段的中心过渡区域连接的第一平面区域和第二平面区域,过渡区域沿循主体的相机管腔的外周边。主体可具有内表面,该内表面为凹形弯曲的并且通过限定相应圆柱体的节段的第一过渡区域和第二过渡区域连接到外表面,第一过渡区域和第二过渡区域沿循第一流体通道和第二流体通道的外周边。壳体可由内部圆形管形成,该内部圆形管设置在外部椭圆形管内并且附接到该外部椭圆形管,以限定相机管腔以及第一流体通道和第二流体通道。壳体可由内部圆形管形成,该内部圆形管具有附接到其的相对的第一外壳和第二外壳,以限定相机管腔以及第一流体通道和第二流体通道。端盖可包括与镜头轴向对准的切口。端盖的面向近侧的表面可限定凹陷部,该凹陷部被构造成引导流体跨过镜头流出壳体的第一流体通道并流入壳体的第二流体通道中。凹陷部可包括与第一流体通道和第二流体通道轴向对准的外侧端部部分以及对端盖的切口敞开的内侧端部部分。
系统可包括从壳体延伸的连接器组件,该连接器组件包括到相机模块的电连接和光学连接以及到壳体的流体连接。连接器组件可具有与壳体的外部形状匹配的外部形状。系统可包括具有电子显示器的控制器,该电子显示器被构造成显示由相机模块的图像传感器捕获的图像数据。
在一些实施方案中,外科方法可包括:将进入装置插入患者体内;将进入装置安装到锚定件,该锚定件包括患者的解剖结构和植入患者体内的植入物中的至少一者;将相机模块插入进入装置中;调节相机模块相对于进入装置的深度;以及将相机模块固定到进入装置的配合特征结构以将相机模块保持在所调节的深度处。
锚定件可包括植入患者的椎弓根中的骨锚。该方法可包括通过进入装置执行外科手术,而无需使用手握持进入装置或相机模块。该方法可包括穿过进入装置插入融合笼并插入椎间盘间隙中。插入进入装置可包括经由TLIF方法将进入装置的远侧端部定位在患者的椎间盘间隙的附近。该方法可包括将相机模块定位在相对于进入装置的相对近侧位置,通过进入装置执行骨切除,将相机模块定位在相对于进入装置的相对远侧位置,以及通过进入装置移除椎间盘组织。该方法可包括引导清洁介质穿过其中设置有相机模块的壳体并且跨过相机模块的镜头。插入进入装置可包括将进入装置的远侧端部定位在患者的干燥环境中。插入进入装置可包括将进入装置的远侧端部定位在患者的窦腔中。该方法可包括使用相机模块执行喉镜检查或支气管镜检查。
在一些实施方案中,外科系统可包括:进入装置,该进入装置具有工作通道和可视化通道;可视化系统,该可视化系统至少部分地设置在可视化通道中,该可视化系统包括相机模块和其中安装有相机模块的壳体;以及组织屏蔽件,所述组织屏蔽件朝远侧延伸超出壳体的末端远侧端面。
组织屏蔽件可能够相对于壳体纵向移动。组织屏蔽件可以可滑动地设置在壳体的管腔内。组织屏蔽件可以可滑动地设置在进入装置的管腔内。组织屏蔽件可以可滑动地沿壳体的外表面设置。组织屏蔽件可包括擦拭件,该擦拭件被构造成当组织屏蔽件相对于壳体纵向移动时从相机模块的镜头清除碎屑。组织屏蔽件可围绕壳体的小于整个周边延伸。组织屏蔽件可包括沿循相机模块的镜头的曲线的弯曲内表面。组织屏蔽件可具有轮廓与壳体的外表面的轮廓匹配的外表面。组织屏蔽件可具有新月形横截面。
在一些实施方案中,外科系统可包括:进入装置,该进入装置具有工作通道和可视化通道;可视化系统,该可视化系统至少部分地设置在可视化通道中,该可视化系统包括相机模块和其中安装有相机模块的壳体;以及主动镜头清洁装置,该主动镜头清洁装置被构造成从相机模块的镜头移除碎屑。
镜头清洁装置可包括通过壳体的管腔导向镜头的正压气体源。气体可包括空气或二氧化碳。镜头清洁装置可包括具有喷嘴开口的流体管腔,流体可通过该喷嘴开口被导向镜头,该喷嘴开口相对于壳体的中心纵向轴线倾斜地成角度。喷嘴开口可形成于从壳体的末端远侧端面延伸的管中。镜头清洁装置可包括具有喷嘴开口的流体管腔,流体可通过该喷嘴开口被导向镜头,该喷嘴开口垂直于壳体的中心纵向轴线延伸。镜头清洁装置可包括超声搅拌器。镜头清洁装置可包括可相对于镜头移动的膜。该膜可包括被构造成携带在擦拭件、刷子、流体射流和真空口中的至少一者上以清洁膜的材料的连续环。可将膜卷绕到卷轴上。膜可延伸穿过壳体的第一管腔,跨过镜头,并且穿过壳体的第二管腔。镜头清洁装置可包括至少部分地设置在进入装置的工作通道中的擦拭件。擦拭件可包括偏移部分,该偏移部分接触形成于工作通道中的突出部,以随着擦拭件的轴在工作通道内纵向移动而迫使擦拭件的末端侧向跨过镜头。擦拭件可朝向可视化通道偏压,使得擦拭件随着相机模块朝远侧推进到可视化通道中而在相机模块的镜头上擦拭。
在一些实施方案中,外科方法可包括:将进入装置插入患者体内;将其中具有相机模块的壳体插入进入装置中,相机模块具有镜头;以及当进入装置和相机模块被插入患者体内时,致动镜头清洁装置以清洁通向相机模块的镜头的可视化路径。
致动镜头清洁装置可包括相对于壳体从壳体的远侧端部纵向突出的组织屏蔽件,以使镜头上携带擦拭件。致动镜头清洁装置可包括引导正压空气通过壳体的管腔并朝向镜头。致动镜头清洁装置可包括振动镜头。致动镜头清洁装置可包括相对于镜头移动膜。移动膜可包括旋转膜材料的连续环,以将膜的脏污部分移动远离镜头并且将膜的干净部分定位在镜头上方。致动镜头清洁装置可包括将相机模块推进通过进入装置以拖动朝向可视化通道偏压的擦拭件翼片跨过镜头。致动镜头清洁装置可包括在工作通道内纵向移动擦拭件,从而引起擦拭件的偏移部分接触设置在工作通道中的突出部,以迫使擦拭件的末端侧向地跨过镜头。
在一些实施方案中,可视化系统可包括:相机模块,该相机模块具有图像传感器和镜头;以及其中设置有相机模块的壳体,该壳体具有主体、一个或多个流体通道以及端盖,该端盖被构造成引导流体流跨过相机模块的镜头流过一个或多个流体通道。
在一些实施方案中,外科系统可包括:进入装置,该进入装置具有工作通道和可视化通道;以及可视化系统,该可视化系统至少部分地设置在可视化通道中,该可视化系统包括相机模块;其中可视化系统可相对于进入装置轴向平移以定位可视化系统,使得相机模块从进入装置的远侧端部突出。
在一些实施方案中,外科方法可包括:将进入装置插入患者体内;将相机模块插入进入装置中;以及调节相机模块相对于进入装置的深度;其中调节相机模块的深度包括定位相机模块,使得相机模块从进入装置的远侧端部突出。
附图说明
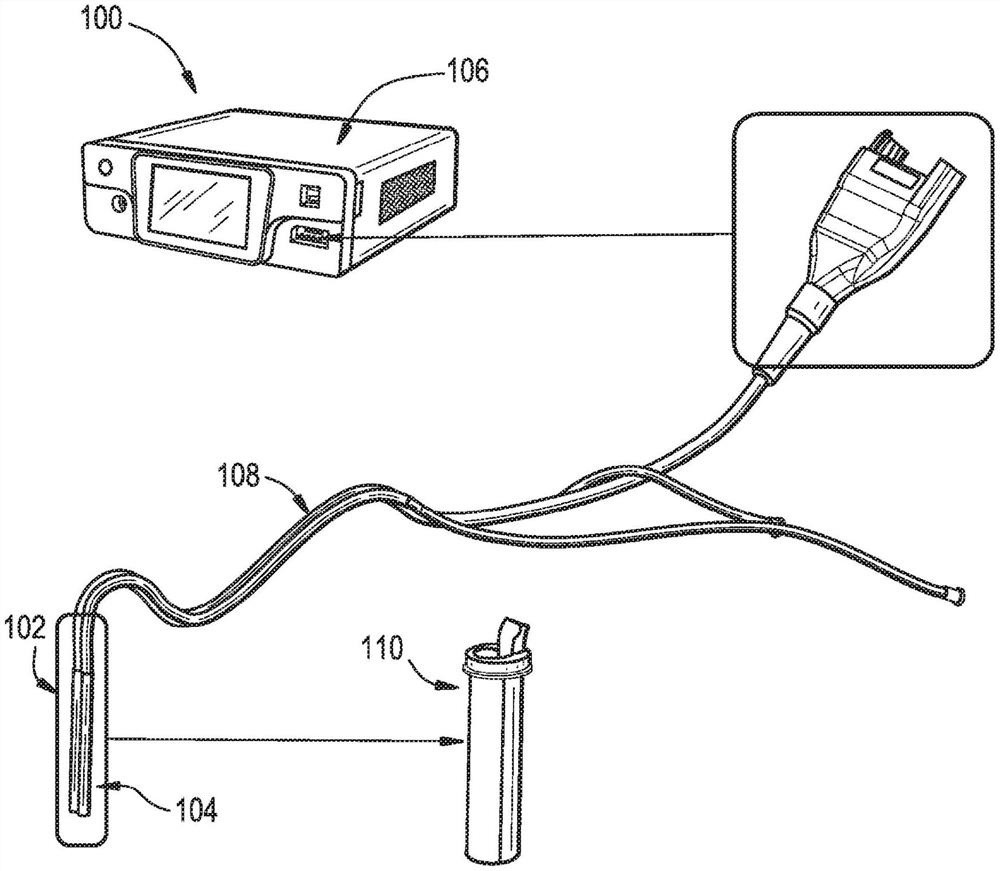
图1是外科手术可视化系统和进入装置的透视图;
图2A是图1的系统的相机模块的透视图;
图2B是图2A的相机模块的剖面侧视图;
图2C是图2A的相机模块的剖面透视图;
图3A是图1的系统的壳体的透视图,其中壳体被示出为透明的,并且其中图2A的相机模块设置在该壳体中;
图3B是图3A的壳体和相机模块的远侧端部的透视图;
图3C是图3A的壳体的透视图;
图3D是图3A的壳体的侧视图;
图3E是壳体和与其远侧端部相邻的图3A的相机模块的剖面透视图;
图3F是图3A的壳体和相机模块的远侧端部的透视图;
图3G是图3A的壳体和相机模块的局部分解透视图;
图3H是图3A的壳体和相机模块的透视图,其中壳体的端盖被示出为透明的并且示意性地示出了流过壳体的流体流;
图3I是图3A的壳体和相机模块的剖面侧视图;
图3J是图3A的壳体和相机模块的剖面透视图;
图4A是图1的系统的连接器组件的透视图;
图4B是与其远侧端部相邻的图4A的连接器组件的剖面透视图;
图5A是图1的系统的控制器的透视图;
图5B是图5A的控制器的示意性框图;
图6A是设置在进入装置中的图1的系统的透视图,其中进入装置被示出为透明的;
图6B是图6A的系统和进入装置的侧视图,其中进入装置被示出为透明的;
图6C是图6A的系统和进入装置的透视图,其中系统设置在进入装置的锁定轨道中;
图6D是图6A的系统和进入装置的透视图,其中系统设置在进入装置的调节轨道中;
图6E是图6A的系统和进入装置的剖面侧视图;
图6F是图6A的系统和进入装置的远侧端部的剖面侧视图;
图6G是图6A的系统和进入装置的顶视图;
图6H是图6A的系统和进入装置的剖面顶视图;
图7是用于在患者的脊柱上执行外科手术的外科系统的透视图,该外科系统包括图1的可视化系统;
图8是图2A的相机模块的剖面侧视图,示意性地示出了相机模块的观看特性;
图9是另一个示例性壳体的远侧端部的透视图;
图10A是另一个示例性壳体的剖面顶视图;
图10B是另一个示例性壳体的剖面顶视图;
图11A是另一个示例性壳体的剖面透视图;
图11B是图11A的壳体的透视图;
图11C是图11A的壳体的剖面透视图;
图11D是图11A的壳体的剖面透视图;
图12A是另一个示例性壳体的剖面顶视图;
图12B是另一个示例性壳体的分解和组装视图;
图13是可包括在本文的进入装置中的配合特征结构的侧视图;
图14是可包括在本文的进入装置中的另一个配合特征结构的透视图;
图15A是以锁定状态示出的可包括在本文的进入装置中的另一个配合特征结构的剖面侧视图;
图15B是以解锁状态示出的图15A的配合特征结构的剖面侧视图;
图16A是可包括在本文的进入装置中的另一个配合特征结构的透视图;
图16B是图16A的配合特征结构的剖面侧视图;
图16C是图16A的配合特征结构的透视图;
图17是可包括在本文的进入装置中的另一个配合特征结构的透视图;
图18是可包括在本文的进入装置中的另一个配合特征结构的透视图;
图19是可包括在本文的进入装置中的另一个配合特征结构的透视图;
图20是图1的系统的透视图,示出了使用者控制器;
图21A是进入装置和标准扩张器的剖面透视图;
图21B是进入装置和扩张系统的透视图;
图21C是图21B的进入装置和扩张系统的剖面透视图;
图21D是图21B的扩张系统的套管的透视图;
图22A是进入装置和扩张系统处于第一构型时的面向近侧的端视图;
图22B是图22A的进入装置和扩张系统处于第二构型时的面向近侧的端视图;
图23A是进入装置的透视图;
图23B是图23A的进入装置的剖面透视图;
图23C是图23A的进入装置的底视图;
图23D是图23A的进入装置的顶视图;
图23E是被构造成与图23A的进入装置一起使用的扩张轴的透视图;
图23F是插入图23A的进入装置中的图23E的扩张轴的剖面透视图;
图23G是插入图23A的进入装置中的图23E的扩张轴的透视图;
图24A是可视化系统的透视图;
图24B是图24A的可视化系统的壳体、相机模块和配合特征结构的透视图;
图24C是图24A的可视化系统的配合特征结构的透视图;
图25A是壳体的具有成角度的喷嘴开口的远侧端部的透视图;
图25B是图25A的壳体的远侧端部的侧视图;
图25C是壳体的具有可从壳体的喷嘴开口部署的擦拭件的远侧端部的透视图;
图26A是壳体的具有组织屏蔽件的远侧端部的透视图;
图26B是图26A的壳体的远侧端部的详细透视图;
图26C是壳体的具有可移动组织屏蔽件的远侧端部的透视图;
图26D是壳体的具有可移动组织屏蔽件的远侧端部的透视图,该可移动组织屏蔽件具有集成擦拭件;
图27A是具有超声搅拌器的相机模块的剖面侧视图;
图27B是具有超声搅拌器的另一个相机模块的剖面透视图;
图28A是具有可移动膜的壳体的剖面侧视图;
图28B是具有可移动膜的另一个壳体的剖面侧视图;
图29A是具有机械擦拭件的进入装置的底视图,其中擦拭件以第一侧向位置示出;
图29B是图29A的进入装置和机械擦拭件的底视图,其中擦拭件以第二侧向位置示出;
图29C是图29A的进入装置和机械擦拭件的剖面侧视图,其中擦拭件以第一侧向位置示出;
图29D是图29A的进入装置和机械擦拭件的剖面侧视图,其中擦拭件以第二侧向位置示出;
图30A是具有机械擦拭件的进入装置的剖面侧视图,其中擦拭件以第一位置示出;并且
图30B是图30A的进入装置和机械擦拭件的剖面侧视图,其中擦拭件以第二位置示出。
具体实施方式
本文公开了例如用于在外科手术期间提供可视化的外科可视化系统和相关方法。本文的系统和方法可用于宽泛范围的外科手术中,包括脊柱外科手术,诸如微创融合或椎间盘切除术。本文的系统和方法可包括用于增强最终用户体验、改善临床结果或降低外科手术侵入性的各种特征结构。示例性特征结构可包括入口集成、免手持操作、主动和/或被动镜头清洁、可调节的相机深度以及许多其他特征结构。
现在将描述某些示例性实施方案,以提供对本文所公开的装置和方法的结构、功能、制造和用途的原理的全面理解。这些实施方案的一个或多个示例在附图中示出。本领域的技术人员应当理解,本文具体描述且附图中示出的装置与方法为非限制性的示例性实施方案。结合一个示例性实施方案示出或描述的特征结构可与其它实施方案的特征结构进行组合。
在一些实施方案中,本文所公开的外科可视化系统可实现免手持的可视化。例如,相机模块可以不需要外科医生、助手或其他使用者将相机手动保持在适当位置的方式安装在进入装置中。又如,进入装置可固定到支撑件,例如手术台、解剖锚定件等,从而不需要使用者手动握持入口或握持设置在其中的相机模块。因此,使用者的手可自由地执行外科手术的其他步骤。
相机模块可与用于执行手术的外科器械分开且独立。因此,可与可视化系统一起使用的器械不受限制,并且系统可与多种定制或现成器械中的任一种一起使用。此类器械可包括具有增加的尺寸、强度、输出力和/或组织处理能力的器械。此外,相机的视觉轨线可与器械定位无关。这可允许相机和/或其上设置相机的进入装置在操纵器械时和进行手术时保持相对静止。因此,相机的视场可在手术期间保持基本上固定,从而与其他可视化系统相比为使用者提供良好的空间取向并提供简化的学习曲线。
传统脊柱显微镜可从患者突出较多,占据手术切口上方的大量空间,并且必须在探头的近侧端部周围保持净空间以允许使用者透过探头进行观察。这可限制在外科手术期间可操纵其他器械的程度,例如限制器械的可能进入角度。这还可限制可使用的器械的尺寸和类型、使用者的手在外科手术的各个步骤期间的放置等等。本文所述类型的可视化系统可与进入装置集成,可具有薄型设计,和/或可在外部监视器上显示捕获的图像,从而减少或消除这些潜在问题。
在一些实施方案中,本文所公开的外科手术可视化系统能够调节相机在进入装置内的深度。在一些实施方案中,可快速容易地调节相机深度。在一些实施方案中,可用一只手以无工具方式调节相机深度。易于调节相机深度的能力可允许针对外科手术的每个阶段以不干扰或不中断外科手术流程的无缝方式优化可视化。例如,在脊柱外科手术中,当执行粗略骨移除和相对低风险但可能导致相机镜头被碎屑遮挡的其他步骤时,相机可向近侧回缩。稍后,当操纵神经或进行需要更大精度的其他任务时,相机可在进入装置内向远侧推进。在一些情况下,相机可被推进以从进入装置的远侧端部突出,例如,以将相机定位在椎间盘间隙内。
在一些实施方案中,本文所公开的外科可视化系统可在恶劣或具有挑战性的操作环境中提供改善的可视化。在许多脊柱手术中,例如,操作环境是干燥的(与使用可视化系统的其他外科手术中存在的流体填充腔相比),并且在外科手术期间可能产生大量烟雾和切屑。本文所公开的外科可视化系统可包括主动和/或被动特征结构,用于从相机镜头清除此类碎屑,或用于防止此类碎屑在第一位置阻挡或粘附到镜头。在一些实施方案中,本文所公开的外科可视化系统可在微创脊柱手术诸如内窥镜式经椎间孔腰椎体间融合(TLIF)手术中提供高分辨率可视化。
在一些实施方案中,本文所公开的外科可视化系统可为一次性使用的,可容易地清洁或消毒的,可具有薄型外形,可为轻质的,可为低成本的,可具有高分辨率,和/或可用于微创外科手术,例如脊柱外科手术。
图1示出了示例性外科可视化系统100。系统100可包括设置在壳体104内的相机模块102。壳体104可被构造用于定位在手术部位处或邻近手术部位定位。系统100可包括控制器或显示器106,该控制器或显示器用于控制相机模块102、用于显示由相机模块捕获的图像等。相机模块102和/或壳体104可通过连接器或连接器组件108联接到控制器106。连接器组件108可包括到相机模块102的电连接和/或光学连接。连接器组件108可包括到壳体104的流体连接。流体连接可用于将材料递送到壳体104,从壳体抽出材料,或者既递送材料又从壳体抽出材料,例如,用于清洁相机模块102的镜头。系统100可能够选择性地安装到进入装置110或其他支撑件,可独立地使用,可能够选择性地安装到外科机器人或连接器臂,可能够穿过外科器械插入,或者可以各种其他方式使用以有利于外科手术。
相机模块102更详细地示于图2A至图2C中。相机模块102可包括用于捕获设置在图像传感器的视野范围内的视场的图像(例如手术部位的图像)的图像传感器112。图像传感器112可被构造成将引导到图像传感器上的光转换成电子信号。图像传感器112可被构造成捕获全彩静态图像和视频图像。图像传感器112可被构造成捕获1080p高清视频。图像传感器112可为全帧图像传感器。图像传感器112可为电荷耦合器件(CCD)图像传感器、互补金属氧化物半导体(CMOS)图像传感器、N型金属氧化物半导体(NMOS)图像传感器、视频芯片、尖端上芯片相机,和/或可使用各种其他图像感测技术。图像传感器112可为具有对任何波长的电磁辐射敏感的像素阵列和支持电路的单色传感器。示例性图像传感器112以及可包括在或结合在相机模块102中的其他特征结构公开于以下文献中:名称为“CONTINUOUS VIDEOIN A LIGHT DEFICIENT ENVIRONMENT”的美国专利申请13/952,518;名称为“IMAGEROTATION USING SOFTWARE FOR ENDOSCOPIC APPLICATIONS”的美国专利申请14/214,412;名称为“SYSTEM,APPARATUS AND METHODS FOR PROVIDING A SINGLE USE IMAGING DEVICEFOR STERILE ENVIRONMENTS”的美国专利8,648,932;名称为“IMAGE SENSOR FORENDOSCOPIC USE”的美国专利8,952,312;名称为“SYSTEM AND METHOD FOR PROVIDINGASINGLE USE IMAGING DEVICE FOR MEDICAL APPLICATIONS”的美国专利8,972,714;名称为“PIXEL ARRAY AREA OPTIMIZATION USING STACKING SCHEME FOR HYBRID IMAGESENSOR WITH MINIMAL VERTICAL INTERCONNECTS”的美国专利9,123,602;名称为“IMAGESENSOR WITH TOLERANCE OPTIMIZING INTERCONNECTS”的美国专利9,153,609;名称为“CAMERA SYSTEM WITH MINIMAL AREA MONOLITHIC CMOS IMAGE SENSOR”的美国专利9,462,234;名称为“WIDE DYNAMIC RANGE USING MONOCHROMATIC SENSOR”的美国专利9,509,917;以及名称为“SYSTEM AND METHOD FOR SUB-COLUMN PARALLEL DIGITIZERS FORHYBRID STACKED IMAGE SENSOR USING VERTICAL INTERCONNECTS”的美国专利9,622,650,这些专利中的每一个均以引用方式并入本文。
相机模块102可包括被构造成将光引导到图像传感器112上的镜头或光学元件114。镜头114可为静态镜头。镜头114可为光学透明材料的单一块。镜头114可为聚合物的。镜头114可具有固定焦距或可具有可调焦距。镜头114可包括机械快门。镜头114可包括可相对于彼此移动的多个光学元件。镜头114可包括一个或多个马达、致动器、齿轮等,用于调节镜头的焦距、光圈尺寸、快门速度和其他参数。相机模块102可包括模块化镜头接收器,使得使用者可将多种镜头中的任一种附接到相机模块。示例性镜头114可包括定焦镜头、标准镜头、广角镜头、鱼眼镜头、长焦镜头、变焦镜头、变形镜头、反射折射镜头、可变焦距或可变焦距范围镜头等。镜头114可包括高速自动聚焦。镜头114可包括可调光圈和可调快门速度。
相机模块102可包括用于照亮图像传感器112的视场的照明系统。照明系统可包括数字或模拟光源。光源可包括一个或多个激光发射器或发光二极管、白炽灯泡等。光源可以任何抖动、漫射或准直发射方式发射光,并且可以数字方式或通过模拟方法或系统来进行控制。光源可为脉冲式的以照亮外科场景。光源可在一个或多个分区中产生脉冲,其中每个分区为小于整个电磁波谱的电磁波谱的预定波长范围。图像传感器112的像素阵列可与光源以电子方式配对,使得在操作期间它们被同步用于接收所反射电磁辐射的发射和系统内所进行的调节。光源可被调谐成发射电磁辐射。光源可以对应于像素阵列的操作和功能的间隔产生脉冲。光源可脉冲多个电磁分区中的光,使得像素阵列接收反射的电磁能并产生与每个特定电磁分区(在时间上)对应的数据集。例如,光源可以任何期望的顺序发射绿色电磁分区、蓝色电磁分区和红色电磁分区,它们可以组合形成彩色图像。可使用任何颜色组合或任何电磁分区来替代红色分区、绿色分区和蓝色分区,诸如青色、品红色、黄色、紫外、红外或任何其他组合,包括所有可见波长和不可见波长。可包括或结合在相机模块102中的示例性照明系统和其他特征结构公开于以下文献中:名称为“YCBCR PULSED ILLUMINATIONSCHEME IN A LIGHT DEFICIENT ENVIRONMENT”的美国专利9,516,239;以及名称为“SUPERRESOLUTION AND COLOR MOTION ARTIFACT CORRECTION IN APULSED COLOR IMAGINGSYSTEM”的美国专利9,641,815,这些专利中的每一个均以引用方式并入本文。
光源可设置在壳体104内,或者可远离壳体设置。例如,照明系统可包括光纤116,该光纤具有设置在壳体104内或紧邻壳体的远侧端部以及与远离壳体设置的光源光学连通的近侧端部。光纤116可将从光源发射的光引导到图像传感器112的视场中。照明系统可包括用于调节各种照明特性的光学元件118。示例性光学元件118可包括漫射体、滤光器等。在例示的实施方案中,相机模块102包括光学元件118,该光学元件被示出为设置在光纤116的末端远侧端部上方的漫射体。
相机模块102可包括印刷电路板组件(PCBA)120。图像传感器112可直接安装到PCBA 120,或者可例如使用连接器122可操作地联接到其上。PCBA 120可包括功率调节电路、硬件逻辑、时钟和/或用于操作图像传感器112并将由图像传感器生成的图像数据传送到控制器106的其他部件。
上述相机模块102的部件中的一个或多个部件可安装在框架或镜头筒124上。镜头筒124可包括其中形成有一个或多个通道或管腔的外侧壁。例如,如图所示,镜头筒124可包括镜头管腔126和照明管腔128。
镜头管腔126可包括近侧端部126p和远侧端部126d以及中心纵向轴线A1。镜头管腔126可具有圆形横截面。镜头114可设置在镜头管腔126的远侧端部内。图像传感器112可定位在镜头管腔126的近侧端部处或近侧端部上。镜头管腔126可在其近侧端部和远侧端部处打开并且沿其侧面闭合,如图所示,或者镜头管腔的一部分或全部可对镜头筒124的外侧壁敞开。
照明管腔128可包括近侧端部128p和远侧端部128d以及中心纵向轴线A2。照明管腔128可具有圆形横截面。光纤116可设置在照明管腔128内。照明管腔128可在其近侧端部和远侧端部处打开并且沿其侧面闭合,或者如图所示,照明管腔的一部分或全部可对镜头筒124的外侧壁敞开。这可有利于在组装期间将光纤116插入到镜头筒124中,例如,通过允许光纤侧向装载或侧向插入到照明管腔128中。照明管腔128的远侧端部可为弯曲的或成角度的,例如使得其在不平行于轴线A2的方向上延伸。该布置方式可允许直切光纤116的平坦远侧端部平行于镜头筒124的成角度切割的远侧端部取向,如图所示。在其他布置方式中,光纤116可成角度切割以匹配镜头筒124的远侧端部。
管腔126、128可彼此同轴或可为非同轴的。例如,管腔126、128可彼此侧向偏移。管腔126、128可被形成为使得它们彼此平行地延伸,例如使得它们相应的中心纵向轴线A1、A2平行。如下文进一步所述,当与进入装置110集成时,照明管腔128可从镜头管腔126径向向内设置,例如使得照明管腔被设置成比镜头管腔更靠近进入装置工作通道的中心。这可在进入装置110的工作通道内提供更均匀的光分布。
镜头筒124的近侧端部可包括凹陷部或凹坑130。图像传感器112可设置在凹陷部130内。图像传感器连接器122和/或PCBA 120的至少一部分可设置在凹陷部130内。镜头筒124可包括设置在镜头114与图像传感器112之间的内部挡板132。挡板132可包括光圈,穿过镜头114的光可通过光圈传送到图像传感器112。光圈可具有固定尺寸或可为机械可调的。
镜头筒124可包括在其末端远侧端部处的面向远侧的表面。镜头筒124的管腔126、128可对面向远侧的表面敞开。面向远侧的表面可倾斜地成角度。例如,面向远侧的表面可基本上位于相对于镜头管腔126的中心轴线A1倾斜地成角度、相对于照明管腔128的中心轴线A2倾斜地成角度、和/或相对于其中设置有相机模块102的工作通道或进入装置的中心纵向轴线倾斜地成角度的平面上。镜头114可如图所示与面向远侧的表面齐平,或者可从面向远侧的表面凹入或突出。面向远侧的表面可包括凹陷部134,照明系统的漫射体或其他光学元件118可设置在该凹陷部中。凹陷部134可围绕照明管腔128的周边形成。凹陷部134和设置在其中的光学元件118可具有如图所示的弯曲或新月形状。凹陷部134可包括沿循或基本上沿循镜头管腔126的周边的内边缘。
如下文进一步所述,当与进入装置110集成时,镜头筒124的面向远侧的表面可在远侧至近侧方向上朝其中设置有相机模块102的进入装置或其工作通道的中心成角度。这可为图像传感器112提供手术部位的更好视图和/或在手术部位内提供更均匀的光分布。镜头筒124可具有卵形、长方形、圆形、椭圆形、正方形、矩形等横截面。
如图3A至图3J所示,相机模块102可安装在壳体104中。壳体104可包括主体136和远侧端盖138。如下文进一步所述,端盖138可被构造成引导流体跨过相机模块102的镜头114和/或照明系统,例如以从其清除障碍物。壳体104可为刚性的或柔性的。壳体104可被制成尽可能短,以有利于将壳体定位在进入装置110内。壳体104可具有小于约60mm的长度。例如,壳体104可具有约45mm或小于约45mm的长度。
壳体104的主体136可包括面向近侧的表面136p、面向远侧的表面136d以及连接面向近侧的表面和面向远侧的表面的侧壁136s。一个或多个通道或管腔可形成于主体136上。主体136可通过挤出多管腔轴来形成。主体136可通过焊接或以其他方式将多个纵向部件彼此附接来形成。
主体136可包括相机管腔140,相机模块102可选择性地安装在相机管腔中。相机管腔140的至少一部分可衬有或可以其他方式包括金属管,金属管可为相机模块102的部件提供电磁屏蔽。
主体136可包括一个或多个流体管腔142。例如,在例示的实施方案中,主体136包括第一流体管腔142A和第二流体管腔142B,第一流体管腔可用于将材料从壳体104的近侧端部输送到壳体的远侧端部,第二流体管腔可用于将材料从壳体的远侧端部输送到壳体的近侧端部。虽然示出了第一流体管腔和第二流体管腔142,但壳体104可包括任何数量的流体管腔。第一管腔和第二管腔142可形成镜头清洁系统的一部分,在镜头清洁系统中,清洁流体或介质通过一个管腔递送以将清洁流体递送到相机模块102的远侧端部,并且抽吸或真空被施加到另一个管腔以将清洁流体、组织、碎屑或其他材料抽离相机模块。在一些实施方案中,流体诸如空气或其他气体可在正压下被导向镜头。正压流体可通过管腔142中的一个或多个传送。管腔142中的每个管腔可包括在其近侧端部处的流体连接器或联接件144,用于在管腔与连接器组件108之间建立流体连通。流体连接器144可为如图所示从主体136的面向近侧的表面136p朝近侧延伸的凸形倒钩配件,或者可为任何其他类型的流体配件或连接,诸如鲁尔连接、凹形配件等。多种不同类型的清洁介质可通过同一管腔或通过单独的管腔递送。多种类型的清洁介质可同时地、顺序地、间歇地或以其他方式递送。在一个示例中,盐水或其他液体的喷雾可通过管腔引导至镜头,并且可被一阵二氧化碳或其他气体驱逐通过同一管腔。在另一个示例中,液体和气体可通过单独的管腔递送。在一些实施方案中,壳体可仅包括单个流体管腔。
壳体104的管腔140、142可为同轴的、非同轴的,或者一些管腔可为同轴的,而其他管腔为非同轴的。相机管腔140可居中设置在第一流体管腔与第二流体管腔142之间,如图所示。壳体104的管腔140、142可彼此平行。管腔140、142可具有各种形状。管腔140、142可具有卵形、长方形、圆形、椭圆形、正方形、矩形等内横截面。相机管腔140可具有与相机模块102或其镜头筒124的外部形状匹配的内部形状。
主体136的面向远侧的表面136d可倾斜地成角度。例如,面向远侧的表面136d可基本上位于相对于壳体104的中心纵向轴线A3倾斜地成角度和/或相对于其中设置有壳体的工作通道或进入装置的中心纵向轴线倾斜地成角度的平面上。主体136的面向远侧的表面136d可以与相机模块102或镜头筒124的面向远侧的表面相同的方式成角度。相机模块102的面向远侧的表面可与主体136的面向远侧的表面136d齐平,或者可相对于面向远侧的表面凹陷或突出。
壳体136的侧壁136s可具有多种形状中的任一种。侧壁136s可具有基本上为三角形、新月形、圆形、正方形或矩形的内横截面。侧壁136s可为圆柱形的。侧壁136s可为弯曲的。侧壁136s可被成形为有利于壳体104与进入装置110的集成,例如以降低或消除壳体干扰进入装置的工作通道的程度。侧壁136s可包括为凹形的内部部分136i。内部部分136i可为弯曲的。内部部分136i可形成进入装置110的工作通道的节段,例如圆柱形或椭圆形工作通道。侧壁136s可包括为凸形的外部部分136o。外部部分136o可为弯曲的。如例如图3E所示,侧壁136s可包括外部部分136o,该外部部分具有由限定圆柱体的节段的中心过渡区域连接的第一平面区域和第二平面区域。过渡区域可沿循相机管腔140的外周边。还如例如图3E所示,侧壁136s可包括内部部分136i,该内部部分为凹形弯曲的并且通过限定相应圆柱体的节段的第一过渡区域和第二过渡区域连接到外部部分136o。第一过渡区域和第二过渡区域可沿循流体管腔142的外周边。
壳体104的端盖138可联接到主体136的远侧端部。端盖138的外部侧壁可具有与主体136的侧壁的形状匹配的形状。端盖138可包括形成于其中的一个或多个切口146。端盖138可包括与相机模块102的镜头114对准的第一切口146A,以允许光穿过端盖并进入镜头中。端盖138可包括与相机模块102的照明系统对准的第二切口146B,以允许光穿过端盖并进入手术部位中。第一切口和第二切口146可为分立的切口或可为邻接的,如图所示。第一切口和第二切口146可为圆形的,可具有与镜头114或照明系统的形状匹配的形状,或者可以其他方式成形以实现如上所述的功能。端盖138的面向近侧的表面可包括用于引导流体流的一个或多个凹陷部、沟槽或通道148。另选地,端盖138的面向近侧的表面可为平的平坦表面,并且凹陷部、沟槽或通道148可形成于主体136的面向远侧的表面中。凹陷部148的侧向端部部分可与主体136的流体管腔142轴向对准。凹陷部148的内侧端部部分可对切口146和/或通向镜头114和照明系统的面向远侧的表面敞开。在使用中,如图3H所示,离开主体136的第一管腔142A的流体可由端盖138引导跨过镜头114和照明系统(例如,照明系统的漫射体或光学元件118)并且朝向第二流体管腔142B的远侧入口,例如沿所示箭头的路径。应当理解,可另选地在相反方向上引导流体。凹陷部148可包括挡板、喷嘴、转向器或用于定制跨过镜头114和/或照明系统的流体流的其他结构。在一些实施方案中,流体流可基本上包含在端盖的内部,例如,不冲洗外科手术部位或其中安装有壳体104的进入装置的工作通道。以这种方式包含流体流可特别适用于“干燥环境”手术,诸如腰椎TLIF手术。包含流体流可有助于限制出血和可能的组织损伤。在其他实施方案中,流体不包含在端盖中并且可用于冲洗手术部位和/或工作通道。
壳体104和/或相机模块102可经由连接器或连接器组件108联接到控制器106。示例性连接器组件108图4A至4B中示出。连接器组件108可在其中包括一个或多个导体。连接器组件108可包括用于将流体递送到壳体104或从壳体递送流体的流体导体。连接器组件108可包括用于将光递送到相机模块102或从相机模块递送光的光学导体。连接器组件108可包括用于在控制器106与相机模块102之间传送图像数据、控制信号或其他信息的电导体。导体可部分地或完全地设置在连接器组件108的外部护套150内。
连接器组件108可包括远侧节段108d和近侧节段108p。在远侧节段108d中,连接器组件108的所有导体可设置在外部护套150内。在近侧节段108p中,导体中的一个或多个可离开外部护套150并且可从其单独地延伸。例如,在例示的实施方案中,连接器组件108的远侧节段108d包括电导体152A、一个或多个光纤152B以及均延伸穿过共用外部护套150的第一流体管腔和第二流体管腔152C。同样在例示的实施方案中,连接器组件108的近侧节段108p被构造成使得电导体152A和一个或多个光纤152B继续穿过共用外部护套150,同时第一流体管腔和第二流体管腔152C作为分立的流体管154离开外部护套。外部护套150可在其近侧端部处包括机械连接器156,用于与控制器106进行光学连接和/或电连接。流体管154可包括相应的流体配件或连接器,用于例如与控制器106的流体贮存器和/或真空源或正压源进行流体连接或与控制器分开进行流体连接。
连接器组件108的远侧节段108d可具有与壳体104的外部形状匹配的外部形状,例如,如图4B所示。连接器组件108的远侧节段108d可与壳体104配合以限定无缝外部过渡。连接器组件108的至少一部分可为柔性的或可弯曲的。如下文进一步所述,连接器组件108的远侧节段108d可为柔性的,以有利于系统100与进入装置110的集成。
示例性控制器106在图5A至5B中示出。尽管本文描绘和描述了示例性控制器106,但应当理解,这是出于普遍性和方便性的原因。在其他实施方案中,控制器106的架构和操作可与这里示出和描述的不同。控制器106可以是平板计算机、移动装置、智能电话、膝上型计算机、台式计算机、基于云的计算机、服务器计算机等。控制器106包括处理器156,用于控制控制器106的操作,例如通过执行嵌入式软件、操作系统、装置驱动程序、应用程序等。处理器156可为或可包括一个或多个微处理器、微控制器、ASIC、FPGA、PIC、从内部或外部存储器或寄存器读取和解释程序指令的处理器等。控制106可包括存储器158,其为将由处理器156执行的代码或由处理器处理的数据提供临时或永久存储。存储器158可包括只读存储器(ROM)、闪存、一种或多种随机存取存储器(RAM)和/或存储器技术的组合。控制器106的各种部件可经由任何一个或多个单独的迹线、物理总线、通信线路等互连。
控制器106可包括接口160,诸如通信接口或I/O接口。通信接口可使得控制器106能够通过网络或通信总线(例如通用串行总线)与远程装置(例如其他计算机系统)通信。I/O接口可有利于一个或多个输入装置、一个或多个输出装置和控制器106的各种其他部件之间的通信。示例性输入装置包括触摸屏、机械按钮、键盘和指向装置。控制器106可包括存储装置162,其可包括用于以非易失性和/或非瞬态方式存储数据的任何常规介质。存储装置162可包括一个或多个硬盘驱动器、闪存驱动器、USB驱动器、光盘驱动器、各种介质盘或卡和/或它们的任何组合。控制器106可包括显示器164,并且可生成要在其上显示的图像。显示器164可为电子显示器、真空荧光显示器(VFD)、有机发光二极管(OLED)显示器或液晶显示器(LCD)。控制器106可包括功率源166以及适当的调制和调节电路。示例性功率源包括电池,诸如聚合物锂离子电池,或用于将控制器106联接到DC或AC电源的适配器(例如USB适配器或壁式适配器)。
控制器106可包括流体源168,当连接器组件附接到控制器106时,流体源可与连接器组件108的流体管腔152C流体连通。流体源168可包括清洁介质的贮存器。清洁介质可为可流动的气体或液体。清洁介质可包括二氧化碳、盐水、氧气、空气、水等中的一种或多种。流体源可包括正压空气或其他气体的源。流体源168可包括泵或用于促使清洁介质穿过连接器组件108和壳体104的其他机构。泵可由处理器156控制以执行清洁循环。清洁循环可自动执行,或响应于使用者指令执行。例如,处理器156可检测按钮、脚踏板或其他接口元件的使用者致动,并且响应于此而启动清洁循环。
控制器106可包括光源170,当连接器组件附接到控制器时,光源可光学联接到连接器组件108的光纤152B。示例性光源包括发光二极管(LED)、白炽灯或荧光灯泡等。
控制器106可包括真空或抽吸源172,当连接器组件附接到控制器时,真空或抽吸源可与连接器组件108的流体管腔152C流体连通。控制器106可包括用于产生抽吸的板载真空泵,或者可被构造成附接到标准医院或手术室真空源。抽吸源172可包括阀、调节器或用于调节施加到壳体104的抽吸程度和/或用于打开或关闭抽吸的其他部件。抽吸源172可由处理器156控制,例如以执行清洁循环。清洁循环可自动执行,或响应于使用者指令执行。例如,如上所述,处理器156可检测按钮、脚踏板或其他接口元件的使用者致动,并且响应于此而启动清洁循环。
控制器106可包括用于与连接器组件108的连接器156和/或流体联接件154配合的一个或多个连接器174。当配合时,连接器可在控制器106与连接器组件108之间建立电连接、光学连接和/或流体连接。应当理解,上述部件中的任何一者或多者可设置在控制器106的壳体外部,和/或可与控制器完全分离或隔离。例如,流体源168、光源170和抽吸源172中的任何一者或多者可在控制器106的外部和/或与控制器分离。
控制器106可从图像传感器112接收图像数据。图像数据可经由有线或无线连接传送。图像数据可包括静止图像数据和/或视频图像数据。控制器106可将图像数据显示在控制器的板载显示器164上,或者显示在可操作地联接到控制器的一个或多个外部监视器或显示器上。可将图像数据显示给外科医生或其他使用者以有利于外科手术。控制器106可显示患者数据、用于操纵系统设置的用户界面控件、用于捕获所显示图像的屏幕截图的控件等。
由控制器106执行的各种功能可在逻辑上描述为由一个或多个模块执行。应当理解,此类模块可能以硬件、软件或其组合来实现。将进一步理解,当以软件实现时,模块可以是单个程序或一个或多个单独程序的一部分,并且可以在各种上下文中实现(例如,作为嵌入式软件包、操作系统、装置驱动程序、独立应用程序和/或其组合的一部分)。此外,体现一个或多个模块的软件可以作为可执行程序存储在一个或多个非暂时性计算机可读存储介质上。
系统100可被配置成与进入装置集成或一起使用。示例性进入装置可包括插管、牵开器、管和用于在外科应用中提供工作通道的其他结构。进入装置可限定从手术部位(例如椎间盘间隙或其近侧的脊柱区域)延伸到患者体外的位置的工作通道。进入装置可包括用于接收可视化系统100的壳体104和相机模块102的可视化通道。可视化通道还可接收连接器组件108的至少一部分。可视化通道可与工作通道相同,可独立于工作通道,或者可与工作通道重叠或相交。工作通道的侧壁的至少一部分可由壳体104的外表面限定。壳体104和/或相机模块102可偏离中心地设置在进入装置内。壳体104和/或相机模块102可以可滑动地和/或可旋转地联接到进入装置。
壳体104和/或相机模块102可例如沿近侧-远侧方向在进入装置内轴向平移,以调节相机模块相对于进入装置的深度。例如,壳体104可相对于进入装置朝远侧推进,以将镜头114和图像传感器112移动成更靠近手术部位。以另一个示例的方式,壳体104可相对于进入装置朝近侧回缩,以移动镜头114和图像传感器112远离手术部位。将相机模块102重新定位在进入装置内的能力可有利于各种外科手术。例如,在示例性TLIF手术中,相机模块102可在切穿Kambin三角时相对浅地定位在进入装置内,然后可在执行后续椎间盘切除术时在进入装置内推进得更深。在一些情况下,可朝远侧将相机模块102推进到椎间隙中。可朝远侧推进相机模块102,以便在进入装置插入患者体内时相机模块从进入装置的远侧端部突出或延伸。例如,可推进相机模块102,使得镜头114和/或图像传感器112设置在进入装置的末端远侧端部的外部和远侧。相机模块102可相对于进入装置推进或回缩到无限数量的相对纵向位置中的任一个。重新定位相机模块102的能力还可允许相机模块成为可与许多不同类型或尺寸的进入装置或与可调节长度的进入装置互换使用的模块化部件。
示例性进入装置110图6A至6H中示出。进入装置110可包括具有近侧端部和远侧端部的细长主体。
进入装置110可限定在近侧端部与远侧端部之间延伸并且具有中心纵向轴线A4的工作通道174。工作通道174可为圆柱形的。工作通道174可具有燕尾形横截面。工作通道174可具有在约3mm至约30mm范围内、在约10mm至约20mm范围内和/或在约12mm至约15mm范围内的直径。工作通道174可具有约15mm的直径。虽然示出了单个工作通道174,但进入装置110可包括任何数量的工作通道。在使用中,器械和/或植入物可设置在工作通道174中、穿过工作通道和/或插入工作通道中以执行外科手术。在一些实施方案中,进入装置110可用于进入椎间盘间隙。切割器械可穿过工作通道174插入以切割组织,诸如骨或椎间盘组织。抽吸器械可穿过工作通道174插入以从椎间隙抽吸材料,包括切除的骨或椎间盘组织。切割器械和抽吸器械可为单个工具。植入物诸如融合笼、高度和/或宽度可伸展的融合笼、椎间盘假体等可通过工作通道174插入椎间隙中。
进入装置110可限定可视化通道176。可视化通道176可在进入装置110的近侧端部与远侧端部之间延伸,或者可沿小于进入装置的整个长度延伸。可视化通道176可包括中心纵向轴线A5。可视化通道176的中心轴线A5可从工作通道174的中心轴线A4径向向外设置。工作通道174可具有比可视化通道176更大的横截面积。可视化通道176沿其长度可对工作通道174敞开或可与工作通道相交。可视化通道176可与工作通道174隔离或分离。
可视化通道176可具有与壳体104的外部横截面匹配或基本上匹配的内部横截面。当设置在可视化通道176内时,壳体104的外表面可限定工作通道174的内侧壁的至少一部分。工作通道174可为围绕中心轴线A4的圆柱形,并且壳体104的面向工作通道的表面可形成以轴线A4为中心的圆柱体的节段。工作通道174的内侧壁和壳体104的外表面可限定基本上平滑且连续的表面。
进入装置110可包括例如用于将进入装置附接到支撑件或其他对象的附接特征结构180。附接特征结构180可形成在进入装置110的近侧端部处。例如,进入装置110可包括形成于其外表面中的环形周向沟槽180。
进入装置110可包括用于将可视化系统100稳定、保持和/或附接到进入装置的配合特征结构178。配合特征结构178可为进入装置110的近侧延伸部,如图所示。配合特征结构178可限定被构造成在其中接收连接器组件108的一个或多个轨道182。轨道182可对一侧开放,使得连接器组件108可例如通过移动连接器组件远离可视化通道176的中心轴线A5而侧向装载到轨道中。另选地或除此之外,可通过相对于配合特征结构178朝近侧或朝远侧平移连接器组件108来将连接器组件装载到配合特征结构中。
轨道182中的一个或多个可限定远离可视化通道176的中心轴线A5弯曲或倾斜地成角度的连接器路径。轨道182可具有与连接器组件108的外部横截面匹配或基本上匹配的内部横截面。轨道182可围绕连接器组件108的外周边延伸。轨道182可围绕连接器组件108延伸到足够的程度,使得轨道的自由边缘略微干扰连接器组件向轨道中的侧向装载。因此,可能需要连接器组件108和/或配合特征结构178的轻微变形或偏转以将连接器组件装载到轨道182中。这可允许连接器组件108由配合特征结构178牢固地保持,例如通过将连接器组件“按扣”到轨道182中。
配合特征结构178可包括内轨道182A和外轨道182B,例如,如图6C、图6D和图6G所示。轨道182可包括上述类型的干涉边缘,以限制连接器组件108移入和移出轨道,但是当施加足够的力时,例如当使用者特别期望执行此类移动时,允许此类移动。内轨道182A可以与可视化通道176轴向对准,或者与其对准到比外轨道182B更大的程度。外轨道182B可为弯曲的、倾斜地成角度的或以其他方式从可视化通道176轴向偏移。当设置在内轨道182A中时,如图6D所示,连接器组件108可保持到进入装置110,同时仍然能够以相对小的摩擦相对于进入装置朝近侧或朝远侧平移。当设置在外轨道182B中时,如图6C所示,连接器组件108相对于进入装置110的近侧-远侧平移可受到限制或被阻止,例如由于连接器组件的弯曲和/或由于连接器组件与进入装置之间增大的摩擦。在使用中,连接器组件108可定位在内轨道182A中以调节相机模块102相对于进入装置110的高度,并且可定位在外轨道182B中以将相机模块相对于进入装置以固定高度牢固地保持在适当位置。
连接器组件108可在沿其长度的任何点处(例如,在沿连接器组件的远侧节段108d的任何点处)固定到配合特征结构178。因此,可视化系统100可在相机模块102的任何插入深度处锁定到进入装置110。此外,可视化系统100可与相机模块102锁定在期望的深度处,而不论进入装置110的长度、配合特征结构178沿进入装置的位置等如何。这可允许可视化系统100与多种不同类型或尺寸的进入装置110中的任何一者互换使用。
将系统100锁定到配合特征结构178的能力可允许相机模块102以免手持方式使用。换句话讲,外科医生或其他使用者在使用期间不需要手动将相机模块102抓握和/或握持在适当位置。配合特征结构178可提供相机模块102的简单、快速和/或单手深度调节,从而导致对手术的最小延迟和破坏。
进入装置110可具有圆形的外部横截面,例如,如图6G所示。进入装置110可具有椭圆形或蛋形的外部横截面,例如,如图6H所示。进入装置110可包括多种其他外部横截面形状中的任一种。进入装置110可具有在约5mm至约30mm范围内、在约10mm至约25mm范围内和/或在约15mm至约22mm范围内的外径或尺寸。进入装置110可具有约17mm的外径或尺寸。进入装置110的外表面可为粗糙的、有棱纹的、经研磨的、或涂覆有具有高摩擦系数的材料或由具有高摩擦系数的材料形成,这可有利地在将进入装置插入患者体内时改善与周围组织的夹持和稳定性。
如上所述并且如图6F所示,当设置在进入装置110中时,相机模块102的镜头114可瞄准工作通道174的中心轴线A4。类似地,当这样定位时,相机模块102的照明系统(例如光纤116和/或光学元件118)可瞄准工作通道174的中心轴线A4。照明系统可从工作通道174的中心轴线A4径向向外设置,并且镜头114可从照明系统径向向外设置。
图7示出了可使用本文所述的装置和方法的示例性外科系统10,但应当理解,此类装置和方法可替代地或除此之外用于各种其他应用中。关于图7的系统的进一步细节可见于2017年2月21日提交的美国申请15/437,792,该文献据此以引用方式并入本文。系统10可用于各种外科手术,包括脊柱外科手术,诸如显微外科骨切除术、脊柱减压术、脊柱融合术等中。一般来讲,系统10可包括进入装置110、组织牵开器12、椎弓根柱或其他锚定件14、连接器16以及相机或可视化系统100中的任何一者或多者。进入装置110可为本文所述的进入装置中的任一者。可视化系统100可为本文所述的可视化系统中的任一者。
使用图7的系统10的示例性方法可包括以多种顺序中的任一种执行的以下步骤中的任一个或多个步骤:a)在患者的皮肤上形成切口;b)穿过切口经皮地插入具有基本上管状形状的进入装置110(诸如管或多槽牵开器),该进入装置具有适于从切口延伸到患者的脊柱中的敏感组织与不敏感组织之间的边界(例如,上关节突(SAP)或椎板)的长度;c)使用连接器16将进入装置稳定到锚定件14(例如,椎弓根锚定件);d)插入集成有进入装置的光学可视化系统100,例如本文所述类型的可视化系统;e)切除上关节突的一部分,以及/或者执行显微外科减压手术;f)穿过进入装置插入组织牵开器12或者从进入装置部署组织牵开器,使得组织牵开器的远侧端部部分延伸到椎间盘,牵开器具有外表面;g)将牵开器的外表面与神经根接触以遮护神经根;h)显微外科减压任何被认为导致神经卡压的组织;i)取出椎间盘材料,包括从椎骨终板移除软骨材料;j)插入椎间体装置;以及k)部署稳定机构以稳定椎间区段。
相机模块102及其镜头114的示例性特性在图8中示出。相机模块102可具有视场(FOV)、观察方向(DOV)和景深(DOF)。FOV可在约60度至约70度的范围内。DOV可在约15度至约30度的范围内。DOV可在约20度至约25度的范围内。DOV可为约22.5度。DOF在约7mm至约40mm度的范围内。
系统100可包括主动清洁特征结构。主动清洁特征可包括将主动力施加到相机模块102的镜头114、照明系统或其他部件。主动力可为或可包括流体射流、流体抽吸、机械或声学振动、机械擦拭件等。主动力可为或可包括朝向相机模块的镜头或其他部件引导、引导到镜头或其他部件上和/或跨过镜头或其他部件的正压空气或其他气体。
系统100可包括被动清洁特征结构。被动清洁特征结构可独立使用,或者可增强或改善主动清洁特征结构的性能。作为一个示例,镜头114可具有施加到其上以抵抗或防止碎屑粘附到镜头的涂层。涂层可为亲水性的。涂层可为亲油性的。涂层可为疏水性的。涂层可为疏油性的。涂层可为防污涂层。涂层可为梯度涂层,例如其中镜头的中心区域具有疏水性涂层并且镜头的周边区域具有亲水性涂层的涂层。梯度镜头涂层可有效地从镜头的中心朝向镜头的外周边“走动”或引导流体离开图像传感器112。
如图9所示,壳体104的流体管腔142可各自包括设置在其远侧端部处的相应喷嘴184。在此类布置结构中,可省略壳体104的端盖138。喷嘴184可被构造成朝向相机模块102的镜头114或照明系统瞄准或引导流体流和/或抽吸力。
图10A示出了壳体104的另一个示例性横截面。如图所示,流体管腔142可被扩大并且可为非圆形的。流体管腔142可为耳朵形的。流体管腔142可为不对称的。
图10B示出了壳体104的另一个示例性横截面。如图所示,流体管腔142可为新月形的或香蕉形的。流体管腔142可具有沿循相机管腔140的外周边的凸形内侧壁。
图11A至11D示出了具有新月形流体管腔142、椭圆形或长方形外部横截面以及具有椭圆形或长方形中心开口146的端盖138的另选壳体104的远侧端部。
如上所述,壳体104的主体136可通过焊接或以其他方式将多个纵向部件彼此附接来形成。例如,如图12A所示,可将内部圆形管136A插入外部椭圆管136B中,以限定具有中心相机管腔140以及第一侧向流体管腔和第二侧向流体管腔142的主体136。内管136A可焊接、粘附或以其他方式附接和/或密封到外管136B。以另一个示例的方式,如图12B所示,相对的外壳136C可焊接或以其他方式附接到内管136A,以限定具有中心相机管腔140以及第一侧向流体管腔和第二侧向流体管腔142的主体136。外壳136C可包括相应的近侧流体联接件144和内部通道,当部件彼此配合时,内部通道将流体联接件连接到形成于外壳与内管136A之间的空隙空间142。图12B所示的布置结构可有利地允许在两个外壳136C到内管136A和/或彼此之间的一个或多个简单焊缝内形成复杂的壳体横截面。
图13示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178A。配合特征结构178A可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。致动轮或齿轮186可以可旋转地安装在轨道182上。轮186可与连接器组件108接合,使得轮的旋转使连接器组件相对于进入装置110推进或回缩。轮186可允许相机模块102进行无级且精确的深度调节。轮186可包括齿、突出部或用于增强使用者抓握和/或轮与连接器组件108之间的摩擦的其他表面特征结构。连接器组件108可包括可与轮186的齿啮合的齿或脊。轮186可被弹簧偏压成与连接器组件108接合。轮186与轨道182之间的间隙可对一侧开放,例如以允许连接器组件108侧向装载到间隙中。使用者可因此以免手持方式执行相机模块102的粗略深度调节,然后将连接器组件108插入间隙中并使用轮186实现精细深度调节。
图14示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178B。配合特征结构178B可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。配合特征结构178B可包括可由使用者致动以选择性地抓持或选择性地释放连接器组件108的夹具188。可使用多种类型的夹具中的任一种,但在例示的实施方案中,配合特征结构178B包括限定中心通路的卷簧188,连接器组件108可穿过该中心通路插入。弹簧188可包括柄部杆,该柄部杆在被挤压在一起时松弛弹簧的张力并且使中心通路的直径伸展以允许连接器组件108相对于进入装置110移动。当杆被释放时,弹簧188中的张力可增大以使中心通路的直径收缩并且夹紧在连接器组件108上,从而将其相对于进入装置110保持在固定位置。
图15A至图15B示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178C。配合特征结构178C可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。配合特征结构178C可包括限定中心通路的O形环190,连接器组件108可穿过该中心通路插入。O形环190可以相对于延伸部178C保持在固定位置,使得当O形环向下夹紧在穿过其插入的连接器组件108上时,连接器组件可相对于延伸部保持在固定位置。延伸部178C可包括具有锥形或倾斜支承表面的可移动按钮192。如图15B所示,将按钮192按压到延伸部178C中(在附图中向左)可有效地将按钮的锥体楔入O形环190中,从而使O形环的直径伸展并允许连接器组件108相对于延伸部移动。如图15A所示,当释放按钮192时,弹簧194可向外(在附图中向右)推压按钮,从O形环190抽出锥体以允许O形环直径收缩并夹紧在连接器组件108上,从而相对于进入装置110将连接器组保持在固定位置。
图16A至图16C示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178D。配合特征结构178D可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。配合特征结构178D可为上述类型的成角度的卡扣式紧固系统。配合特征结构178D可被优化以与具有圆形外部横截面的连接器组件108一起使用。配合特征结构178D可包括纵向取向的调节轨道182A和倾斜或侧向取向的锁定轨道182B。
图17示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178E。配合特征结构178E可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。配合特征结构178E可为上述类型的成角度的卡扣式紧固系统。配合特征结构178E可包括纵向取向的调节轨道182A和倾斜或侧向取向的锁定轨道182B。锁定轨道182B可通过支柱或梁196与进入装置110的主体间隔开一定距离并且径向向外。配合特征结构178E可被构造成仅在锁定轨道182B处接触连接器组件108。配合特征结构178E可易于制造并且可适应连接器组件108的逐渐弯曲半径。
图18示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178F。配合特征结构178F可包括形成于进入装置110的近侧边缘上的切口198。配合特征结构178F可为上述类型的卡扣式紧固系统。连接器组件108可定位在配合特征结构178F的纵向取向的调节轨道182A内,以允许相机模块102的深度调节。连接器组件108可被推出调节轨道182A并进入切口198中以向连接器组件施加足够的摩擦,从而限制或阻止相机模块102的深度调节。切口198可为U形的。切口198可为V形的。配合特征结构178F可允许连接器组件108的路线以更大的角度并且更靠近患者的皮肤表面远离进入装置110,从而减小系统100的总体轮廓并且保持连接器组件不妨碍外科医生或其他使用者。
图19示出了用于将可视化系统100附接到进入装置110的示例性配合特征结构178G。配合特征结构178G可包括进入装置110的近侧延伸部,该近侧延伸部具有用于引导或保持可视化系统100的连接器组件108的轨道182。配合特征结构178G可包括例如经由延伸部的活动铰链或柔性材料特性以能够枢转的方式联接到其的封盖或闭合盖101。封盖101可定位在闭合状态,在该闭合状态下,其将连接器组件108夹持到延伸部以限制或阻止相机模块102的深度调节。封盖101可定位在打开状态,在该打开状态下,封盖不接合连接器组件108,或以较小程度接合连接器组件,使得连接器组件可相对于延伸部移动以调节相机模块102的深度。封盖101可例如经由按扣锁、卡扣锁或其他锁定结构保持在闭合状态。封盖101可包括杆103以有利于从闭合状态释放封盖。
如图20所示,可视化系统100还包括使用者控件105。使用者控件105可设置在沿可视化系统100的多个位置中的任何位置处,例如沿连接器组件108的远侧部分,如图所示。在使用中,使用者控件105可定位在无菌场内。这可允许外科医生或其他使用者直接致动控件105,而不必离开无菌场或依赖于无菌场外的助手。控件105可以可操作地联接到相机模块102、控制器106、流体源168、光源170和/或抽吸源172。对控件105的致动可有效地启动清洁操作、停止清洁操作、捕获图像、旋转由相机模块102捕获的图像的显示、调节所显示图像的白平衡、调节所显示图像的亮度、播放或停止所录制视频、放大或缩小(以光学和/或数字方式)所显示图像等。控件105可包括一个或多个下压按钮。控件105可包括一个或多个脚部开关。控件105可包括用于将清洁介质朝相机模块102引导的手动泵或注射器。控制器105可包括集成到连接器组件108中的遥控器。控制器105可包括经由有线或无线连接联接到控制器106的遥控器。
可使用各种扩张技术将本文所公开的进入装置插入患者体内。在示例性方法中,导丝或针可穿过患者的经皮切口插入。可使用荧光镜引导、外科导航系统、免手持或其他方式放置导丝。切口可例如通过在导丝上插入一个或多个扩张器而顺序地或连续地扩张,每个扩张器具有逐渐增大的外径。一旦充分扩张,就可通过将最外侧的扩张器放置到进入装置的工作通道中并且使进入装置沿扩张器向远侧滑动并进入患者体内来插入进入装置。然后可从患者体内移除一个或多个扩张器,留下通过进入装置的开放工作通道,通过该通道可进行外科手术。
可存在其中可能有必要或期望增强标准圆柱形扩张技术的情况。例如,如图21A所示,进入装置110可包括圆柱形工作通道174和偏移的可视化通道176。进入装置110可具有非圆柱形外部尺寸。可视化通道176可在与进入装置110的远侧端部相距一定距离处终止,从而在可视化通道远侧的进入装置内留下空隙空间107。如图所示,当标准圆柱形扩张器109穿过工作通道174插入时,在进入装置110的远侧端部处,在扩张器的外表面与进入装置的邻近可视化通道176的外表面之间存在尖锐过渡或台阶111。在该示例和/或其他示例中,可使用扩张系统来促进进入装置110的插入和设置在可视化通道176的路径中的组织的扩张。
图21B至图21D示出了示例性扩张系统。如图所示,该系统可包括套管113,该套管具有可移动地联接到其上的灯泡形部115。当套管113设置在进入装置110的工作通道174中时,灯泡形部115可占据进入装置中的空隙空间107,并且在扩张器109的外表面与进入装置的邻近可视化通道176的外表面之间提供平滑过渡117。因此,灯泡形部115可最小化或消除上述步骤111。
套管113可为基本上圆柱形的。套管113可为中空的以限定通道119,标准圆柱形扩张器109可通过该通道插入。套管113可限定外径D。灯泡形部115可能够相对于套管113在第一位置与第二位置之间移动,在第一位置,灯泡形部完全设置在套管的外径D内,在第二位置,灯泡形部的至少一部分从套管的外径D突出。灯泡形部115可朝向第二位置偏压。灯泡形部115可附接到套管113或与套管一体形成。灯泡形部115可通过弹簧附接到套管。例如,灯泡形部115可安装在套管113的纵向片簧或平板弹簧121的远侧端部处。弹簧121可为套管113的限定在形成于套管中的相对纵向狭缝之间的一体延伸部。灯泡形部115可包括面向远侧的表面115d,该面向远侧的表面是倾斜的、弯曲的、渐缩的或以其他方式被构造成在设置在套管113中的扩张器109的外径与进入装置110的外径之间提供平滑的引入端。灯泡形部115可包括面向近侧的表面115p,该面向近侧的表面是倾斜的、弯曲的、渐缩的或以其他方式被构造成随着套管113从进入装置110朝近侧抽出而朝向第一位置径向向内推压灯泡形部。
在使用中,可使用标准圆柱形扩张器(包括最外侧扩张器109)顺序地扩张切口。套管113可装载到进入装置110中,其中灯泡形部115设置在第一径向向内位置。可相对于进入装置110朝远侧推进套管113,直到灯泡形部115处于空隙空间107的深度处,此时,灯泡形部可在弹簧121的偏压下径向向外移动到第二位置。灯泡形部115还可通过穿过套管113插入扩张器109而被径向向外推压并且保持在该位置。然后,可在最外扩张器109上方朝远侧推进带有插入的套管113的进入装置110。随着朝远侧推进进入装置110,灯泡形部115的面向远侧的表面115d可将组织轻轻地推出进入装置的路径。一旦根据需要定位进入装置110,就可通过从套管113朝近侧抽出扩张器来从套管移除扩张器109。也可通过从进入装置110朝近侧抽出套管113来从进入装置移除套管。随着相对于进入装置110朝近侧抽出套管113,可径向向内推压灯泡形部115,例如通过抵靠可视化通道176的远侧端部的灯泡形部115的面向近侧的表面115p,从而将灯泡形部移动到第一径向向内位置以允许从进入装置移除套管。套管113可形成在其远侧端部处的轮廓不同于在其近侧端部处的轮廓的扩张器。
图22A至图22B示出了另一个示例性扩张系统,其中套管113A被构造成相对于进入装置110围绕工作通道174的中心纵向轴线A4旋转。套管113A可具有允许套管径向伸展和收缩的纵向狭缝或其他特征结构。套管113A可在插入进入装置110中时径向收缩,以径向向外偏压灯泡形部115A。套管113A可围绕轴线A4在图22A所示的第一位置与图22B所示的第二位置之间旋转,在第一位置,灯泡形部115从空隙空间107旋转地偏移并且因此被工作通道174的内侧壁径向向内偏转,在第二位置,灯泡形部与空隙空间旋转地对准,使得灯泡形部径向向外弹以填充空隙空间。在第一位置,灯泡形部115A可被定位成使得其不妨碍套管113A从进入装置110的插入或移除。在第二位置,灯泡形部115A可填充空隙空间107以提供扩张器与进入装置110之间的平滑过渡,例如,如上所述。套管113A可形成在其远侧端部处的轮廓不同于在其近侧端部处的轮廓的扩张器。
图23A至图23G示出了另一个示例性扩张系统。如图所示,进入装置110A的远侧端部可包括倾斜、弯曲或渐缩的过渡部分123,该过渡部分提供穿过进入装置的工作通道174插入的圆柱形扩张器与进入装置的邻近可视化通道176的外表面之间的平滑过渡。过渡部分123可为柔性的或可弯曲的。过渡部分123可能够在第一位置与第二位置之间移动,在第一位置,过渡部分径向向内延伸以提供平滑的面向远侧的扩张表面123d,在第二位置,过渡部分从第一位置径向向外移动以便不阻挡安装在进入装置110A中的相机模块的视场。过渡部分123可包括一个或多个可移动的指状部125。指状部125可由形成于进入装置110A的外壁中的多个纵向狭缝限定。指状部125可具有弹性材料特性,使得它们朝向第一位置向内偏压。
过渡部分123可通过可穿过进入装置110A插入的扩张轴127在第一位置与第二位置之间移动。扩张轴127可包括远侧罩129,该远侧罩被构造成随着扩张轴在进入装置110A内向远侧推进以径向向外推压过渡部分而接触并抵靠过渡部分123。罩129可形成如图所示的圆柱体的节段。可视化通道176的至少一部分可形成于扩张轴127中。当相机模块102设置在进入装置中并且随着执行外科手术,扩张轴127可保持在进入装置110内的适当位置。
图24A至图24C示出了辅助可视化系统100A。系统100A可独立使用,或者可与上述可视化系统100一起使用。系统100A可包括相机模块102A、壳体104A和连接器组件108A,它们中的每个可包括系统100的对应部件的特征结构中的任一特征结构。系统100A可用作免手持触针式或杆式相机。系统100A可穿过进入装置的工作通道插入,而系统100穿过进入装置的可视化通道插入。相机100、100A两者可联接到同一控制器或显示器,或者各自可联接到独立的控制器或显示器。可同时使用多个辅助相机100A。在脊柱外科手术的情况下,辅助相机100A可延伸到椎间隙中,并且主相机100可保持在进入装置内。辅助相机100A可使用配合特征结构131附接到进入装置。配合特征结构131可被构造成相对于进入装置保持或支撑辅助相机100A。配合特征结构131可允许辅助相机100A的免手持操作。如图24C所示,配合特征结构131可包括用于附接到辅助相机100A的壳体或连接器组件的C形夹具或其他机构133。配合特征结构131可包括上文关于用于将可视化系统100附接到进入装置的配合特征结构所述的特征结构中的任一个特征结构。配合特征结构131可包括用于将配合特征结构附接到进入装置的近侧边沿的远侧夹具或弹性条135。
图25A至图25B示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104B。壳体104B可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104B可包括一个或多个流体管腔142B。流体管腔142B可包括设置在其远侧端部处的喷嘴184B。喷嘴184B可被构造成朝向相机模块102的镜头114瞄准或引导流体流和/或抽吸力。喷嘴184B可由形成于一定长度的管材的侧壁上的狭槽或切口137限定,该管材从壳体104B的远侧端部朝远侧突出。狭槽137可允许流体在管腔142B的内部与邻近可视化通道的远侧端部的区域或者设置在其中的相机模块102的镜头114或其他部件之间流动。狭槽137可倾斜地成角度。例如,狭槽137的长轴可相对于流体管腔142B的中心纵向轴线、壳体104B的中心纵向轴线和/或进入装置的中心纵向轴线或进入装置的可视化通道以斜角延伸。在一些实施方案中,狭槽137可相对于垂直于壳体104B的中心纵向轴线的横向平面以角度B延伸。角度B可在约5度至约85度的范围内。角度B可在约10度至约60度的范围内。角度B可在约15度至约30度的范围内。角度B可为约22.5度。狭槽137的角度可等于或基本上等于壳体104B的倾斜远侧端部和/或镜头114的倾斜远侧端部的对应角度。狭槽137可非倾斜地成角度。例如,狭槽137的长轴可垂直于流体管腔142B的中心纵向轴线、壳体104B的中心纵向轴线和/或进入装置的中心纵向轴线或进入装置的可视化通道延伸。在此类布置结构中,壳体104B的远侧端部和/或镜头114的远侧端部同样可垂直于流体管腔142B的中心纵向轴线、壳体104B的中心纵向轴线和/或进入装置的中心纵向轴线或进入装置的可视化通道延伸。狭槽137可具有与镜头表面的角度匹配的角度。
壳体可包括擦拭件、刷子、翼片或用于从镜头清除碎屑的其他特征结构。擦拭件可设置在壳体的管腔内、穿过壳体的管腔插入和/或可从壳体的管腔部署。例如,擦拭件可选择性地通过壳体的流体管腔的喷嘴开口部署。擦拭件可在流体被引导通过管腔并朝向镜头之前、期间或之后从开口部署以从镜头擦拭碎屑。图25C示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104H。壳体104H可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104H可包括一个或多个流体管腔142H。流体管腔142H可包括设置在其远侧端部处的喷嘴184H。喷嘴184H可被构造成朝向相机模块102的镜头114瞄准或引导流体流和/或抽吸力。喷嘴184H可由形成于一定长度的管材的侧壁上的狭槽或切口137H限定,该管材从壳体104H的远侧端部朝远侧突出。狭槽137H可允许流体在管腔142H的内部与邻近可视化通道的远侧端部的区域或者设置在其中的相机模块102的镜头114或其他部件之间流动。用于从镜头清除碎屑的擦拭件、刷子、翼片或其他特征结构177可设置在管腔142H内。擦拭件177可包括近侧轴179和远侧擦拭件末端181。擦拭件末端181可选择性地通过喷嘴狭槽137H部署,以从镜头114擦拭碎屑。例如,可在管腔142H内向远侧推进轴179,以将擦拭件末端181推出狭槽137H并朝向镜头114推动。擦拭件末端181可由弹性材料、形状记忆材料形成,或者可以其他方式朝向镜头114偏压以有利于此类部署。擦拭件末端181可为柔性的。一旦通过狭槽137H部署擦拭件末端181,轴179可相对于壳体104H轴向旋转,以拖动擦拭件末端181跨过镜头表面,从而从其清除碎屑。轴179可相对于壳体104H朝近侧抽出,以使擦拭件末端181回缩到管腔142H中。
壳体可包括用于回缩、屏蔽或操纵与相机镜头相邻的组织的各种特征结构。例如,图26A至图26B示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104C。壳体104C可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。壳体104C可包括从壳体的远侧端面朝远侧延伸或突出的屏蔽件139。屏蔽件139可包括外表面139o和内表面139i。当壳体104C插入患者体内时,屏蔽件139的外表面139o可抵靠相邻组织,以抑制组织并且防止组织膨胀到相机镜头114的视场中。另选地或除此之外,随着朝远侧将壳体104C推进到患者体内,屏蔽件139的远侧末端可轻轻地推开组织,或者可用作支座以防止镜头114与组织之间的意外接触,这种意外接触可能导致镜头的不期望的结垢。屏蔽件139还可在清洁流体或试剂喷射经过镜头表面时有助于清洁流体或试剂的流动,例如通过将朝向镜头114浓缩、转向或靶向流体。屏蔽件139可围绕壳体104C的整个周边延伸,或者如图所示,可仅围绕壳体周边的一部分延伸。屏蔽件139的外表面139o可具有与壳体104C的外表面136o的轮廓匹配的轮廓,使得壳体和屏蔽件限定连续平滑的外表面。屏蔽件139可具有凸形外表面和凹形内表面。屏蔽件139可具有新月形横截面。屏蔽件139可在其侧向边缘处包括内圆角或倒角141,以提供到壳体104C的面向远侧的表面的平滑过渡。屏蔽件139的内表面可具有沿循镜头114的曲率半径的曲率半径。屏蔽件139可从壳体104C的远侧端面朝远侧突出距离D。距离D可在约2mm至约30mm的范围内。距离D可在约4mm至约12mm的范围内。距离D可为约8mm。
屏蔽件可能够相对于壳体移动。例如,屏蔽件可相对于壳体回缩,例如纵向回缩。在一些实施方案中,屏蔽件可以可滑动地设置在形成于壳体中的管腔内。屏蔽件可被构造成在管腔内沿近侧-远侧方向纵向平移。这可允许屏蔽件根据使用者的需要选择性地展开或回缩,或者允许在外科手术期间调节屏蔽件突出的程度。屏蔽件相对于壳体的移动可以各种方式进行控制,例如通过使用者手动抓持屏蔽件的近侧端部并相对于壳体滑动。图26C示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104D。壳体104D可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104D可包括管腔143,屏蔽件139可滑动地安装在该管腔中,从而有利于屏蔽件相对于壳体104D的纵向调节。
屏蔽件可包括擦拭件、刷子、翼片、流体射流、真空口或例如用于随着屏蔽件相对于壳体移动而从镜头清除碎屑的其他特征结构。图26D示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104E。壳体104E可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104E可包括管腔143,屏蔽件139可滑动地安装在该管腔中,从而有利于屏蔽件相对于壳体104E的纵向调节。屏蔽件139可包括安装到屏蔽件的内表面139i的擦拭件翼片145。随着屏蔽件139相对于壳体104E朝近侧抽出,翼片145可接触壳体的远侧端部,从而导致翼片向外张开并且擦过镜头114的面。屏蔽件139的继续近侧移动可导致翼片145折叠到其自身上并且向上滑动到管腔143中。当相对于壳体104E朝远侧推进屏蔽件139时,翼片145可抵靠屏蔽件的内侧壁139i平坦放置,以便不阻挡相机镜头114的视野。翼片145可由柔性和/或弹性材料诸如弹性体、硅树脂等形成。
组织屏蔽件可如上所述设置在壳体的管腔内,或者可以其他方式结合到系统中。例如,组织屏蔽件可与壳体一体形成,可与进入装置一体形成,和/或可与相机模块一体形成。又如,组织屏蔽件可以可滑动地设置在壳体的管腔、进入装置的管腔和/或相机模块的管腔内。又如,组织屏蔽件可沿壳体、进入装置和/或相机模块的外表面滑动。
系统可包括用于维持相机的清晰可视化的主动机械和/或声学系统。例如,系统可包括超声搅拌器,该超声搅拌器可被致动以从镜头清除碎屑或首先防止碎屑阻塞镜头。图27A示出了可与本文所述的壳体和/或进入装置一起使用的示例性相机模块102B。相机模块102B可包括本文所述的其他相机模块(例如相机模块102)的特征结构中的任一个特征结构。如图所示,相机模块102B可包括超声换能器147。换能器147可如图所示安装到镜头筒124,或安装到相机模块的任何其他部件,诸如镜头114、图像传感器112、照明管腔128、PCBA120等。虽然换能器147被示出为安装到相机模块102B,但应当理解,换能器可安装到可视化系统的任何部件,包括壳体或进入装置。换能器还可设置在单独的部件中或上,单独的部件诸如设置在相机模块或入口周围的外部护套或套环。换能器可经由设置在连接器108中的电线可操作地连接到控制器106。在使用中,可向换能器施加电势以产生可摇动碎屑远离或离开镜头的机械振动。
换能器可为压电换能器。换能器可发射例如具有约20kHz至约40kHz范围内的频率的超声波。换能器可为环形换能器、板型换能器或任何其他合适的换能器类型。
图27B示出了可与本文所述的壳体和/或进入装置一起使用的示例性相机模块102C。相机模块102C可包括本文所述的其他相机模块(例如相机模块102)的特征结构中的任一个特征结构。如图所示,相机模块102C可包括超声换能器147。换能器147可为轴向设置在镜头筒124的远侧端部与透明顶盖149之间的环状或环形元件的形式。盖149可形成相机模块102C的最外侧远侧范围,并且因此可限定暴露于可能积聚碎屑的外科环境的表面。换能器147可为压电元件,当向换能器施加电势时,压电元件在所示箭头的方向上振荡。这可有效地振动顶盖149并且促使小滴或碎屑151离开顶盖表面。换能器147的环形形状可有利地提供穿过换能器到镜头114或图像传感器112的清晰位点线,同时向围绕顶盖149的整个圆周施加基本上均匀的振动。
虽然上文描述了超声搅拌器,但应当理解,可替代地或除此之外使用用于向系统施加振动或搅拌的任何装置。在一些实施方案中,可使用具有偏心安装的质量块的电动马达向系统施加振动。马达可安装在相机模块、壳体或进入装置内。在一些实施方案中,系统可包括被构造成在向相机模块施加电势时撞击相机模块的致动器,诸如螺线管或线性致动器。在使用中,可将电流选择性地施加到致动器,以使致动器撞击相机模块,从而从镜头移除或清除碎屑。致动器可安装在相机模块、壳体或进入装置内。在一些实施方案中,可使用在超声频率范围以下(例如,在次声或声学范围内)工作的发生器从镜头清除碎屑。
系统可包括可在镜头上移动的膜,以维持穿过镜头的可视性。该膜可为透明的。可将膜拉过镜头以改变膜的与镜头对准的部分,例如将膜的脏污节段移动远离镜头并且用膜的干净节段替换脏污节段。膜可为材料的连续环,该材料的连续环被拉过镜头并且移动经过擦拭件、刷子、翼片、流体射流、真空口或从膜移除碎屑的其他清洁元件。因此,膜的脏污节段可移动远离镜头并且被膜的干净节段替换,脏污节段最终跨过刷子或擦拭件移动以在该节段再次与镜头对准之前清洁该节段。膜可卷绕在一个或多个卷轴上,例如其中膜的脏污节段在使用之后卷绕在一个卷轴上,因为干净节段从另一个卷轴退绕以与镜头对准。膜的移动可为连续的或间歇的。膜的移动可由电动马达、手动曲柄或柄部或各种其他机构进行控制。膜的移动可例如响应于控制器检测到碎屑或从相机捕获的图像中不清晰而自动发生,或者例如响应于使用者致动按钮、轮或其他输入机构而手动发生。
图28A示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104F。壳体104F可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104F可包括可移动膜153。膜153的第一端部可围绕设置在壳体104F的近侧端部处或附近的第一“干净”卷轴155A卷绕。膜153可延伸穿过壳体104F的第一纵向管腔157A,跨过镜头114的暴露面,并且返回穿过壳体的第二纵向管腔157B。膜153的第二端部可围绕设置在壳体104F的近侧端部处或附近的第二“脏污”卷轴155B卷绕。在使用中,可旋转一个或两个卷轴155以在所示箭头的方向上移动膜153,从而将膜的脏污节段移动远离镜头114,并且转而将膜的干净节段与镜头对准。卷轴155中的一个或两个可由马达或手动输入装置驱动。
图28B示出了可与本文所述的相机模块和/或进入装置一起使用的示例性壳体104G。壳体104G可包括本文所述的其他壳体(例如壳体104)的特征结构中的任一个特征结构。如图所示,壳体104G可包括可移动膜153。膜153可为沿循穿过壳体104G的路径的材料的连续环,该路径使膜跨过镜头114的暴露面并且跨过擦拭件、刷子、翼片、流体射流、真空口或其他清洁元件159。膜153可包裹在一系列辊161上,这些辊中的一个或多个可联接到马达或手动输入装置以实现膜的移动。在使用中,可旋转辊161中的一个或多个以在所示箭头的方向上移动膜153,从而将膜的脏污节段移动远离镜头114,并且转而将膜的干净节段与镜头对准。随着膜153移动,膜的脏污节段可携带在清洁元件159上以在膜的该节段与镜头114重新对准之前清洁该节段。
系统可包括可跨过镜头移动以从镜头清除碎屑的机械擦拭件。图29A至图29D示出了示例性擦拭件163。擦拭件163可穿过本文所述的进入装置中的任一个进入装置的工作通道(例如,如图所示的进入装置110B的工作通道174B)插入或设置在该工作通道内。擦拭件163可在近侧-远侧方向上移动,例如通过向擦拭件的近侧端部施加手动输入力,以使擦拭件在横向方向上跨过相机镜头114移动以从其清除碎屑。如图所示,擦拭件163可包括细长擦拭件轴165和擦拭件末端167。末端167可由相对柔软的材料诸如硅氧烷、橡胶、弹性体等形成。轴165可包括偏移部或凹凸部169,该偏移部或凹凸部与形成于进入装置的工作通道中的突出部171相互作用,以将轴的纵向移动转换成擦拭件末端167的侧向移动。具体地讲,如图29A和图29C所示,当擦拭件轴165在工作通道内向近侧移动时,突出部171接触擦拭件轴中的偏移部169,以侧向地(在例示的示例中向右)推压擦拭件末端167。突出部171和/或偏移部169可限定倾斜或渐缩的表面以促进此类侧向移动。擦拭件末端167跨过镜头114的侧向移动可有效地从镜头表面清除碎屑。如图29B和图29D所示,当擦拭件轴165随后向远侧移动时,擦拭件轴上的偏移部169可纵向移动经过突出部171,使得允许擦拭件轴在相反的侧向方向上移动,从而以相反的方向(在例示的示例中向左)将擦拭件末端167带回镜头114。擦拭轴165可朝向工作通道的侧壁(在所示的示例中向左)偏压以促进此类侧向移动。擦拭件末端167跨过镜头114的返回侧向移动可有效地从镜头进一步清除碎屑。
图30A至图30B示出了另一个示例性擦拭件173。擦拭件173可穿过本文所述的进入装置中的任一个进入装置的工作通道插入或设置在该工作通道内。擦拭件173可包括朝向进入装置110的可视化管腔176偏压的柔性和/或弹性材料翼片175。随着相机模块102和/或壳体104纵向移动经过翼片175,翼片可跨过镜头114的暴露面擦拭以从其清除碎屑。具体地讲,如图30A所示,当壳体104和相机模块102朝近侧抽出时,擦拭件173的偏压可导致翼片175移动到进入装置110的可视化通道176中。如图30B所示,随着壳体104和相机模块102随后朝远侧推进,当壳体和相机模块将擦拭件173推出路径时,翼片175可跨过镜头114的暴露表面擦拭。每次相机模块102移动经过擦拭件翼片175时,擦拭件173可实现镜头114的自动清洁。相机模块102可在进入装置110内根据需要或期望多次重复上下移动以清洁镜头114。擦拭件翼片175可由相对柔软的材料诸如硅氧烷、橡胶、弹性体等形成。
本文所述的各种镜头清洁机构可单独使用或组合使用。例如,可视化系统可包括机械擦拭件、超声搅拌器、可移动膜和流体清洁系统。又如,可视化系统可包括超声搅拌器和流体清洁系统。又如,可视化系统可包括可移动膜和流体清洁系统。也可使用任何其他组合或子组合。
本文所公开的可视化系统和/或进入装置可用于多种外科手术中的任一种。例如,此类系统和装置可用于耳鼻喉(ENT)外科手术、鼻窦外科手术、胃肠(GI)外科手术、腹部外科手术、血管内外科手术、心胸外科手术、关节外科手术等。在一些实施方案中,可视化系统可在具有或不具有进入装置的情况下作鼻窦外科手术的自清洁内窥镜。系统的主动和/或被动清洁特征结构可减少或消除重复地从患者体内抽出镜来清洁镜头的需要。在一些实施方案中,可视化系统可在具有或不具有进入装置的情况下用作气道外科手术(例如喉镜检查、支气管镜检查等)的自清洁内窥镜。在一些实施方案中,可视化系统可在具有或不具有进入装置的情况下用作自清洁上GI镜和/或下GI镜。可视化系统可形成具有自清洁能力的刚性内窥镜。
本文所公开的各种壳体和相机模块可与进入装置一起使用,或者可在没有任何进入装置的情况下独立使用。本文所述的任何系统可包括与相机模块分开且不同的壳体,或者可包括一体相机模块和壳体,例如其中相机模块的外包层限定壳体的系统。
应当指出的是,上面的描述中或附图中所表达或暗示的方法步骤的任何顺序不应理解为是限制所公开的方法按照该顺序执行步骤。相反,本文所公开的每种方法的各种步骤可按照任意多种顺序执行。此外,由于所描述的方法仅为示例性实施方案,因此包括更多步骤或包括更少步骤的各种其他方法也涵盖在本公开的范围内。
本文公开的装置可由多种已知材料中的任一种构造。示例性材料包括适用于外科应用中的材料,该材料包括金属(诸如不锈钢、钛、镍、钴-铬、或它们的合金和组合)、聚合物(诸如PEEK、陶瓷、碳纤维)等。本文所公开的装置的各种部件可为刚性的或柔性的。装置的一个或多个部件或部分可由不透射线的材料形成,以便于在荧光镜透视检查和其它成像技术下可视化,或者由射线可透过的材料形成,以便不干扰其它结构的可视化。示例性射线可透过的材料包括碳纤维和高强度聚合物。
本文所公开的装置和方法可用于微创外科手术和/或开放式外科手术中。虽然本文公开的装置和方法一般在对人类患者的脊柱外科手术的上下文中进行描述,但是应当了解,本文公开的方法和装置可用于对人类或动物受试者、对无生命对象(在非外科应用中)等等的任何类型的外科手术中。
虽然上面描述了具体实施方案,但是应当理解,在所描述的构思的实质和范围内可作出多种变化。
- 外科可视化系统和相关方法
- 带有黄斑接触透镜的OCT外科手术可视化系统