一种交流电机转矩自动控制器
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于交流电机驱动控制技术领域,尤其涉及一种交流电机转矩自动控制器。
背景技术
交流电机相比于直流电机,其结构更为紧凑、使用维护过程也更为简单,并且具有对环境要求低以及节能等诸多优势,因此在工农业生产、交通运输、日常生活中具有广泛的应用前景。其中,为实现对交流电机的精确控制,现有技术通常采用基于逆变器的输出扭矩矢量控制方法或者基于磁链的直接转矩控制方法。然而发明人进一步研究后发现,现有交流电机转矩控制过程中会使用到PLC、继电器、保护装置等一系列复杂控制设备,控制过程复杂、维护涉及的结构单元数量众多,投资成本较高,不利于交流电机的经济化、小型化发展。
发明内容
本发明提供了一种交流电机转矩自动控制器,该交流电机转矩自动控制器集成度更高,通信以及抗干扰性能更强,可实现交流电机转矩的实时测量与恒转矩的自动调节控制,因而为实现交流电机的经济化、小型化发展提供了帮助。
为解决上述技术问题,本发明采用了如下技术方案:
一种交流电机转矩自动控制器,包括有:
MCU模块、高压驱动模块、应力采集模块、4-20MA模拟量输出模块以及人机交互模块;
MCU模块采用型号为STM32F103C8的芯片;其中,STM32F103C8的VBAT引脚接3.3V直流电源,STM32F103C8的VDDA引脚接3.3V直流电源相连接;STM32F103C8的VSSA引脚接地;
高压驱动模块包括有AC转DC电路单元、型号为ULN2002D的驱动芯片以及多路DC控制电路;其中,AC转DC电路单元的输入端与交流电源的三相输出端相连接,AC转DC电路单元的输出端通过接口电路JP11与ULN2002D的B1~B5引脚相连接;ULN2002D的E引脚接地,ULN2002D的C1~C5引脚分别与一路DC控制电路的触发端相连接;多路DC控制电路的输出端汇聚后,与STM32F103C8的PC13-TAMPER-RTC引脚相连接;
应力采集模块采用型号为HX712的芯片;其中,HX712的AVDD引脚接3.3V直流电源,HX712的AGND引脚接地,HX712的DVDD引脚、BAT引脚接3.3V直流电源,HX712的DGND引脚接地,HX712的PD_SCK引脚与STM32F103C8的PB0引脚相连接,HX712的DOUT引脚与STM32F103C8的PB1引脚相连接;HX712的REFP引脚、HX712的REFN引脚、HX712的INN引脚分别与接口电路JP1相连接,HX712的INP引脚、接地端分别与接口电路JP13相连接;
4-20MA模拟量输出模块包括有光电隔离电路、第一比较器Q1、第二比较器Q2、第一三极管;其中,光电隔离电路由第一发光二极管C1、第一光敏三极管VT1构成;第一发光二极管C1的正极端接3.3V直流电源,第一发光二极管C1的负极端与STM32F103C8的PA8引脚相连接;第一光敏三极管VT1的集电极与第一比较器Q1的正极输入端相连接,第一光敏三极管VT1的发射极接地;第一比较器Q1的负极输入端与第一比较器Q1的输出端相连接,且均与第二比较器Q2的正极输入端相连接;第二比较器Q2的输出端与第一三极管的基级端相连接,第二比较器Q2的负极输入端与第一三极管的发射极相连接;第一三极管的集电极、第一三极管的发射极还分别与接口电路JP6相连接;
人机交互模块包括有型号为TM1649的显示驱动芯片、与显示驱动芯片相配套的显示屏;其中,TM1649的VDD引脚接5V直流电源,TM1649的GND引脚接地;TM1649的STB引脚与STM32F103C8的PA3引脚相连接,TM1649的SCLK引脚与STM32F103C8的PA4引脚相连接,TM1649的DIO引脚与STM32F103C8的PA5引脚相连接;TM1649的SEG1~SEG8引脚与显示屏的数据输入端相连接,TM1649的GRID1~GRID6引脚与显示屏的控制极端相连接。
较为优选的,人机交互模块中还包括有多个与显示驱动芯片相配套的功能指示发光二极管;
TM1649的SEG9~SEG12引脚与任意一个功能指示发光二极管的数据输入端一一对应相连接,TM1649的GRID7引脚与多个功能指示发光二极管的控制极端相连接。
优选的,还包括有蜂鸣器;所述蜂鸣器的输入极端通过熔断开关与5V直流电源相连接,蜂鸣器的输出极端与IGBT开关的集电极相连接;IGBT开关的基级端与STM32F103C8的PC14-OSC32_IN引脚相连接;IGBT开关的发射极端接地。
优选的,还包括有RS485通讯模块;RS485通讯模块采用型号为ISL3172EIBZ-T的芯片。
优选的,还包括有RJ45通讯模块;RJ45通讯模块采用型号为CH9121的芯片。
较为优选的,还包括有电源模块;所述电源模块用于提供1.8V、3.3V、5V的直流电源。
可选择的,MCU模块的STM32F103C8的PC15-OSC32_OUT引脚与发光二极管CL的负极端相连接,发光二极管CL的正极端与3.3V直流电源相连接。
本发明提供了一种交流电机转矩自动控制器,该交流电机转矩自动控制器包括有MCU模块、高压驱动模块、应力采集模块、4-20MA模拟量输出模块以及人机交互模块等结构单元。具有上述结构特征的交流电机转矩自动控制器,其结构集成度高,操作简单,通信接口丰富,具有交流电机转矩实时测量以及恒转矩自动调节控制等功能;替代现有常规电机转矩控制设备后,可有效降低生产成本,并为实现交流电机的经济化、小型化发展提供了帮助。
附图说明
该附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在下述附图中:
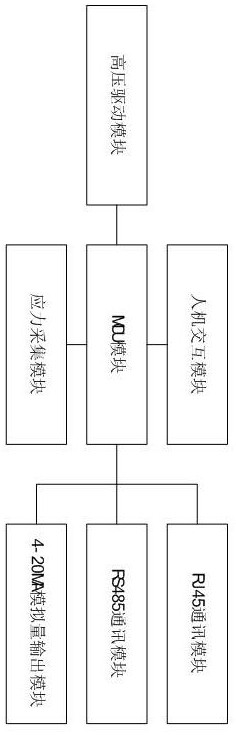
图1为本发明提供的交流电机转矩自动控制器的结构框体;
图2为本发明提供的型号为STM32F103C8的MCU模块芯片的电气示意图;
图3为本发明提供的型号为ULN2002D的驱动芯片的电气示意图;
图4为本发明提供的型号为HX712的应力采集模块的电气示意图;
图5为本发明提供的4-20MA模拟量输出模块的电路示意图;
图6为本发明提供的型号为TM1649的显示驱动芯片的电气示意图;
图7为本发明提供的蜂鸣器的电气示意图。
具体实施方式
本发明提供了一种交流电机转矩自动控制器,该交流电机转矩自动控制器集成度更高,通信以及抗干扰性能更强,可实现交流电机转矩的实时测量与恒转矩的自动调节控制,因而为实现交流电机的经济化、小型化发展提供了帮助。
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
实施例一
本发明提供了一种交流电机转矩自动控制器,如图1所示,具体包括有MCU模块、高压驱动模块、应力采集模块、4-20MA模拟量输出模块以及人机交互模块。
如图2所示,MCU模块采用型号为STM32F103C8的芯片。其中,该MCU模块作为主控模块,用于实现交流电机转矩自动控制器的整体逻辑处理控制以及数据运算处理过程(具体由电源模块提供3.3v工作电压,并负责电机控制信号的输出、称重模块的数据计算、4-20ma输出、485总线通讯以及RJ45网络通讯接口的控制等等);STM32F103C8芯片作为一种32位基于ARM核心的微型控制器,其内部配置有ARM32位的Cortex™-M3 CPU、64K或128K的闪存存储器、带校准功能的RC振荡器、模数转换器、DMA控制器、多个快速I/O端口、多个定时器以及多个通信接口。具体的,STM32F103C8的VBAT引脚接3.3V直流电源,STM32F103C8的VDDA引脚接3.3V直流电源相连接;STM32F103C8的VSSA引脚接地。而作为本发明一种较为优选的实施方式,MCU模块的STM32F103C8的PC15-OSC32_OUT引脚与发光二极管CL的负极端相连接,发光二极管CL的正极端进一步与3.3V直流电源相连接。值得注意的是,该发光二极管CL用于指示STM32F103C8是否接入有外部晶振;当有外部晶振接入时,发光二极管CL常亮。
高压驱动模块中包括有AC转DC电路单元、如图3所示的型号为ULN2002D的驱动芯片以及多路DC控制电路,具体负责AC-DC转换并为整机各模块提供隔离的5v工作电压,以及交流电机的控制、缺项与短路保护等工作;该模块优选使用达林顿芯片驱动继电器实现电机的启动控制和换向控制。其中,AC转DC电路单元用于实现交流电-直流电的电压转换;而ULN2002D驱动芯片具体是一种五通道继电器驱动电路,其电路内部配置有五个独立的达林顿管驱动通道(每个达林顿管集电极可输出500mA电流),可根据需要转换生成每一路DC控制电路所需的工作电压;多路DC控制电路则相配合以实现电机的启停以及正反转的控制(以及电机缺相报警检测等一系列控制)。具体的,AC转DC电路单元的输入端与交流电源的三相输出端相连接,AC转DC电路单元的输出端通过接口电路JP11与ULN2002D的B1~B5引脚相连接;ULN2002D的E引脚接地,ULN2002D的C1~C5引脚分别与一路DC控制电路的触发端相连接;多路DC控制电路的输出端汇聚后,与STM32F103C8的PC13-TAMPER-RTC引脚相连接。
进一步的,如图4所示,应力采集模块采用型号为HX712的芯片,具体由电源模块提供5v工作电压,其采集所得的应力信号发送至MCU模块进行计算和处理。其中,HX712芯片是一款海芯科技生产的高精度、应力采集处理专用的24位A/D转换芯片,其内部集成有传感器电源开关、时钟振荡器、电池电压检测以及配套的芯片工作所需外围电路,用于采集应力传感器(称重传感器)所收集的模拟量,转换为数字信号后提供给MCU实现对交流电机转矩的控制过程。具体的,HX712的AVDD引脚接3.3V直流电源,HX712的AGND引脚接地,HX712的DVDD引脚、BAT引脚接3.3V直流电源,HX712的DGND引脚接地,HX712的PD_SCK引脚与STM32F103C8的PB0引脚相连接,HX712的DOUT引脚与STM32F103C8的PB1引脚相连接;HX712的REFP引脚、HX712的REFN引脚、HX712的INN引脚分别与接口电路JP1相连接,HX712的INP引脚、接地端分别与接口电路JP13相连接。
进一步的,如图5所示,图5提供了一种4-20MA模拟量输出模块的电路示意图,该4-20MA模拟量输出模块用于将采集到的应力(重量)数据经过光电隔离后在经过比较器转化成PWM信号,并经电容滤波、运放转化后生成4-20mA模拟信号输出,供外部其他工业设备采集。该4-20MA模拟量输出模块包括有光电隔离电路、第一比较器Q1、第二比较器Q2、第一三极管构成;其中,光电隔离电路由第一发光二极管C1、第一光敏三极管VT1构成;第一发光二极管C1的正极端接3.3V直流电源,第一发光二极管C1的负极端与STM32F103C8的PA8引脚相连接;第一光敏三极管VT1的集电极与第一比较器Q1的正极输入端相连接,第一光敏三极管VT1的发射极接地;第一比较器Q1的负极输入端与第一比较器Q1的输出端相连接,且均与第二比较器Q2的正极输入端相连接;第二比较器Q2的输出端与第一三极管的基级端相连接,第二比较器Q2的负极输入端与第一三极管的发射极相连接;第一三极管的集电极、第一三极管的发射极还分别与接口电路JP6相连接。
而人机交互模块包括有如图6所示的型号为TM1649的显示驱动芯片、与显示驱动芯片相配套的显示屏。该人机交互模块主要用于负责数值显示、报警提示、手动控制输入,数值设定的输入等,其具体供电由电源模块提供5v工作电压,与MCU模块之间采用数字通讯接口,设定的数值保存在MCU模块中断电不会丢失数据且外接有三个按键,用于现场人员操作(例如:手动左转,手动右转,本地与远程切换按键);内部五个按键(例如:用于技术人员设定参数,采用五键导航式布局设计,用来设定个参数,三个按键指示灯,用来指示操作人员电机状态)。其中,TM1649显示驱动芯片是一种带有8个触摸按键、支持8个普通按键、配套有显示屏的显示驱动电路,其内部集成有数字接口、数据锁存器、LED高压驱动、键盘扫描等诸多单元;具体的,该人机交互模块用于根据设定功能,实现对交流电机转矩实时数值、平均数值的显示。TM1649的VDD引脚接5V直流电源,TM1649的GND引脚接地;TM1649的STB引脚与STM32F103C8的PA3引脚相连接,TM1649的SCLK引脚与STM32F103C8的PA4引脚相连接,TM1649的DIO引脚与STM32F103C8的PA5引脚相连接;TM1649的SEG1~SEG8引脚与显示屏的数据输入端相连接,TM1649的GRID1~GRID6引脚与显示屏的控制极端相连接。
实施例二
实施例二包括有实施例一中的全部技术特征;此外,实施例二还进一步公开有:人机交互模块中包括的多个与显示驱动芯片相配套的功能指示发光二极管。值得注意的是,功能指示发光二极管由显示驱动芯片TM1649驱动控制,用于指示交流电机转矩的工作情况;举例来说,例如:指示显示一:用于指示本交流电机转矩自动控制器的工作状态;正常时为常亮,工作状态异常时闪烁;指示显示二:交流电机正转状态;平时不亮,交流电机正转时亮起,触发正转限位开关时闪烁;指示显示三:交流电机手动控制工作状态;平时不亮,开启时常亮,关闭手动控制后熄灭;指示显示四:交流电机反转状态;平时不亮,交流电机反转时亮起,触发反转限位开关时闪烁。其连接关系可具体描述为:TM1649的SEG9~SEG12引脚与任意一个功能指示发光二极管的数据输入端一一对应相连接,TM1649的GRID7引脚与多个功能指示发光二极管的控制极端相连接。
此外,还进一步对人机交互模块其内部参数设置进行如下举例说明:(1)、变量含义;(2)、拉力量程上限;(3)、拉力量程下限;(4)、拉力高报警上限;(5)、拉力低报警下限;(6)、拉力实时值;(7)、拉力平均值;(8)、拉里设定值;(9)、拉里设定系数;(10)、拉力高停机设定值;(11)、点动时间;(12)、自动正转;(13)、自动反转;(14)、手动正转;(15)、手动反转;(16)、手自动切换;(17)、报警使能。
实施例三
实施例三包括有实施例一中的全部技术特征;此外,实施例三还进一步公开有交流电机转矩自动控制器所优选包括的蜂鸣器、RS485通讯模块、RJ45通讯模块、电源模块结构单元。具体的,如图7所示,该蜂鸣器的输入极端通过熔断开关与5V直流电源相连接,蜂鸣器的输出极端与IGBT开关的集电极相连接;IGBT开关的基级端与STM32F103C8的PC14-OSC32_IN引脚相连接;IGBT开关的发射极端接地;
RS485通讯模块采用型号为ISL3172EIBZ-T的芯片,RJ45通讯模块采用型号为CH9121的芯片。而最后,电源模块则用于提供1.8V、3.3V、5V的直流电源,以便为交流电机转矩自动控制器的各结构单元供电。
进一步结合上述结构特征对本发明提供的交流电机转矩自动控制器其工作过程进行如下说明:在本交流电机转矩自动控制器上电后,由人机交互模块中的显示屏显示设备工作状态(例如应力采集模块采集数据是否正常、功能指示发光二极管是否存在报警);在确认显示正常无误后,即可进行电机操作控制。具体控制可参考:例如,按下外部正转按钮,MCU模块接收交流电机的正转信号,控制交流电机正反转控制模块工作,由交流电机配置的专属固态继电器根据信号闭合相关电路,控制交流电机正转运行。而在抬起外部正转按钮,MCU模块没有接收到交流电机正转信号,固态继电器则根据信号断开正转电路,交流电机停止转动。按下外部反转按钮,MCU模块接收交流电机反转信号,控制交流电机正反转控制模块工作,固态继电器根据信号闭合相关电路,控制交流电机反转运行。抬起外部反转按钮,MCU模块没有接收到电机反转信号,固态继电器根据信号断开反转电路,交流电机停止转动。通过以上操作,技术人员可根据控制交流电机正反转,实现交流电机的力矩控制,并可实时借助人机交互模块数据,根据需求控制交流电机实现生产要求。
至此,形成的交流电机转矩自动控制器,其通过配套的软件算法,实现了对交流电机转矩的实时测量与恒转矩自动调节控制,实现了数据远程通信功能;并且改变了传统交流电机控制需要PLC、继电器、保护装置等复杂控制单元,实现了设备小型化以及经济化。
本发明提供了一种交流电机转矩自动控制器,该交流电机转矩自动控制器包括有MCU模块、高压驱动模块、应力采集模块、4-20MA模拟量输出模块以及人机交互模块等结构单元。具有上述结构特征的交流电机转矩自动控制器,其结构集成度高,操作简单,通信接口丰富,具有交流电机转矩实时测量以及恒转矩自动调节控制等功能;替代现有常规电机转矩控制设备后,可有效降低生产成本,并为实现交流电机的经济化、小型化发展提供了帮助。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 一种交流电机转矩自动控制器
- 一种用于交流同步电机启动的转矩提升装置及电机装置