具有平层装置和回转功能的横移台车存取车辆的方法
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及一种存取车辆的方法,特别涉及一种具有自动平层装置的横移台车存取车辆的方法,属于多(高)层垂直升降类机械式立体停车设备技术领域。
背景技术
垂直升降类大轿厢式塔库是在轿厢上用横移台车平面移动车辆、实现存取停放车辆的机械式停车设备,属于仓储式停车设备中的一种常用机型,具有高智能、高精度控制、高速运行、大型化紧凑设计、形式多样等特点。这种设备能够根据建筑和环境等客观条件,进行各种方式的系统组合,最大限度地满足客户的需求,因而广泛适应于机场、车站、繁华商业区、体育场、写字楼等城市的不同区域,是机械停车库中最为理想的型式之一。
设备的主要组成:钢构框架、升降驱动系统、升降轿厢、出入口装置、横移台车(或称搬运台车、巷道搬运器、中跑车)、电气控制系统等,横移台车上设有智能搬运器。
运行原理:在车库巷道中通过横移台车来完成同一停车层面内车辆的移动,由升降轿厢来完成不同停车层面车辆的上下升降动作,钢结构的顶部设置升降驱动系统,升降驱动系统驱动提升链条,提升链条连接升降轿厢上的吊点座,驱动升降轿厢沿着钢结构上设置的竖直轨道上下运行,通过两者的配合,来实现多层垂直升降类车库存取车辆的过程,由横移台车上的智能搬运器与泊车位进行车辆的交换。
存车操作:驾驶员将车开到车库前,车库门打开。在库内停车自动引导指示屏提示下,驾驶员将车驶入入口内,此时检测装置将对车的长、宽、高进行测量,以确定该车是否适合入库。然后驾驶员熄火、拉制动、下车、锁闭车门,退出车库;人员检测装置可发现车库内是否还有滞留人员,当上述安全检测未能通过时,系统会发出警铃声,中央控制室可通过对讲机或者扬声器通知管理人员和驾驶员调整车辆或清理人员;上述安全检测均通过时,车库门关闭。升降轿厢带着横移台车运行至出入口层,横移台车移至出入口相对应的位置,搬运器将出入口的车辆搬运至升降轿厢的横移台车上,再由升降轿厢载着车辆升降到指定停车层,最后由智能搬运器将车辆平移到指定空置泊车位,设备完成存车动作。
取车操作:驾驶员或车库管理员在控制盒面板上插入停车卡、或在操作面板上输入指令。升降轿厢升降到指定停车层,横移台车移至泊车位相对应的位置,搬运器将指定泊车位的车辆搬运至升降轿厢的横移台车上,再由升降轿厢载着车辆升降到出入口层,横移台车移至出入口相对应的位置,搬运器将车辆搬运至出口,然后车库门自动打开,驾驶员将车开出,完成取车。
可见,在自动化机械式停车设备运行过程中,横移台车承担着重要的任务,需要将搬运器及搬运器上的车辆运送至指定泊车位,在与泊车位导轨对接时需要搬运器行走轨道与泊车位导轨处于同一平面,才能保证搬运器运行平稳,通常普遍的做法是对每个泊车位加装平层定位装置,对于车位数较多的停车设备,仅安装调试平层定位装置就会增加很多工作量,会严重影响工程施工的效率和速度,也使得停车设备的成本大大增加。
为解决上述问题,本申请人2019年9月3日提出了申请号为2019108250474、名称为具有摆臂式自动平层装置的轿厢类机械停车设备用横移台车的发明专利申请,包括底盘、设置于底盘上的行走系统、搬运器导向轨道、搬运器行走轨道、控制系统,行走系统驱动横移台车沿着升降轿厢上的导轨前后移动,搬运器可沿着导向轨道、行走轨道在底盘上左右移动,所述横移台车的左右两端分别设有一套可独立运行的摆臂式平层机构。省却了每个泊车位的平层定位装置,使得设备的结构更简单、生产成本低、安装效率高、调试方便,搬运器行走轨道与泊车位导轨在一定的偏差范围内均能自动进行平层动作。横移台车的左右两端分别设置一套可独立运行的摆臂式平层机构,左右两端均可进行平层定位,正常情况下仅需要停放车辆的车位侧摆臂式平层机构工作,当目标泊车位位于巷道的左侧时,只需横移台车左端的摆臂式平层机构动作即可,同样当目标泊车位位于巷道的右侧时,只需横移台车右端的摆臂式平层机构动作即可。上述存取车的方法仍有尚待改进之处,如平层臂在摆臂驱动电机驱动下摆动并抵靠在立体停车设备钢结构的横梁上,底盘的一端被升起,使搬运器行走轨道与左泊车位导轨处于同一平面,实现平层功能;底盘在升起的过程中需要克服底盘自身的重量和车辆、搬运器的重量,需要较大的电机和减速机,制造和使用成本较高;平层臂抵靠在横梁上时对横梁有冲击,会产生噪音和震动;升降轿厢由链条或钢丝绳通过设置于钢结构顶部的升降驱动系统驱动其升降,在平层后,进行存取车辆的动作时,搬运器将车辆搬运至升降轿厢的横移台车上或从升降轿厢的横移台车搬离,升降轿厢上的载荷发生变化,链条或钢丝绳的伸长量会随之发生变化,造成横移台车上智能搬运器的轨道与泊车位或出入口平台上的导轨的相对位置处于变化状态,平层精度降低。
另外在现有的机械式立体车库中,为方便出入库时驾车前行的习惯,实现正进正出的车辆入出库方式,一般是通过将出入口门设置为贯通门的方式实现,存车时车辆从入口(前门)驶入,取车时车辆从出口(后门)驶出。或者是在出入口(出入库室)设置回转装置来实现车辆旋转掉头,以便于用户可以驾车前行驶出车库;这两种方式都存在车库出入口设备复杂,占用面积大等缺点,且在出入口(出入库室)进行车辆的旋转掉头,也会增加存取车的时间,使得车库的运行效率低。
发明内容
本发明的目的在于针对上述现有技术的不足,提供一种具有平层装置和回转功能的横移台车存取车辆的方法,该方法制造和使用成本较低、平层精度高;其不仅可在巷道内高速行走运送车辆,并且可以在高速运行的同时进行车辆回转,实现车辆旋转掉头,正进正出,并可减少占地面积,节约存取车时间,提高车库的运行效率。
本发明为实现上述目的所采用的技术方案是:
一种具有平层装置和回转功能的横移台车存入车辆的方法,其特征在于:该方法采用具有伸缩式自动平层装置和回转功能的横移台车存入车辆,具体步骤如下:
(1)横移台车运行至停放车辆的车库入口处,控制系统控制升降装置工作,将升降回转架顶起,使得升降回转架的下平面高于入口平台;
所述的具有伸缩式自动平层装置和回转功能的横移台车包括底盘、设置于底盘上的行走系统、搬运器轨道,行走系统驱动横移台车沿着升降轿厢上的导轨前后移动,搬运器可沿着搬运器轨道左右移动,还包括升降回转架,所述的搬运器轨道设置于升降回转架上,升降回转架与底盘之间设置有升降装置和回转装置,升降装置驱动升降回转架相对于底盘做升降运动,回转装置驱动升降回转架相对于底盘做回转运动,所述升降回转架上设有伸缩式平层机构,平层机构工作时升降回转架的载荷作用于机械式停车设备的钢结构框架上;伸缩式平层机构包括平层臂和驱动平层臂伸出或缩回的驱动机构;
(2)控制系统控制驱动机构工作,平层机构的平层臂伸出;
(3)控制系统控制升降装置工作,使升降回转架下降,平层臂搭接在入口平台上,升降回转架上的搬运器轨道与入口平台导轨处于同一平面,实现平层功能;
(4)控制系统启动搬运器,将停放在入口平台上的车辆搬运至搬运器上,然后一同返回横移台车;
(5)控制系统控制升降装置工作,使升降回转架上升;
(6)控制系统控制驱动机构工作,平层机构的平层臂缩回;
(7)控制系统控制升降装置工作,使升降回转架下降,升降回转架处于低位;
(8)主升降驱动系统将升降轿厢提升至目标停车层,横移台车载着搬运器、车辆共同运行至指定的泊车位;
(9)控制系统控制升降装置工作,将升降回转架顶起,使得升降回转架的下平面高于立体停车设备钢结构的横梁;
(10)控制系统控制驱动机构工作,平层机构的平层臂伸出;
(11)控制系统控制升降装置工作,使升降回转架下降,平层臂搭接在立体停车设备钢结构的横梁上,升降回转架上的搬运器轨道与泊车位导轨处于同一平面,实现平层功能;
(12)控制系统启动搬运器,搬运器将车辆搬运至泊车位上后返回横移台车;
(13)控制系统控制升降装置工作,使升降回转架上升;
(14)控制系统控制驱动机构工作,平层机构的平层臂缩回;
(15)控制系统控制升降装置工作,使升降回转架下降,升降回转架处于低位,恢复初始状态。
一种具有平层装置和回转功能的横移台车取出车辆的方法,其特征在于:该方法采用具有伸缩式自动平层装置和回转功能的横移台车取出车辆,具体步骤如下:
(1)主升降驱动系统将升降轿厢提升至目标停车层,横移台车载着搬运器共同运行至存放车辆的泊车位;
所述的具有伸缩式自动平层装置和回转功能的横移台车包括底盘、设置于底盘上的行走系统、搬运器轨道,行走系统驱动横移台车沿着升降轿厢上的导轨前后移动,搬运器可沿着搬运器轨道左右移动,还包括升降回转架,所述的搬运器轨道设置于升降回转架上,升降回转架与底盘之间设置有升降装置和回转装置,升降装置驱动升降回转架相对于底盘做升降运动,回转装置驱动升降回转架相对于底盘做回转运动,所述升降回转架上设有伸缩式平层机构,平层机构工作时升降回转架的载荷作用于机械式停车设备的钢结构框架上;伸缩式平层机构包括平层臂和驱动平层臂伸出或缩回的驱动机构;
(2)控制系统控制升降装置工作,将升降回转架顶起,使得升降回转架的下平面高于立体停车设备钢结构的横梁;
(3)控制系统控制驱动机构工作,平层机构的平层臂伸出;
(4)控制系统控制升降装置工作,使升降回转架下降,平层臂搭接在立体停车设备钢结构的横梁上,升降回转架上的搬运器轨道与泊车位导轨处于同一平面,实现平层功能;
(5)控制系统启动搬运器,将停放在泊车位上的车辆搬运至搬运器上,然后一同返回横移台车;
(6)控制系统控制升降装置工作,使升降回转架上升;
(7)控制系统控制驱动机构工作,平层机构的平层臂缩回;
(8)控制系统控制升降装置工作,使升降回转架下降,升降回转架处于低位;
(9)横移台车载着搬运器、车辆共同运行至升降轿厢的中间位置;
(10)主升降驱动系统驱动升降轿厢向出口所在的停车层移动,在移动过程中、到达出口所在的停车层之前,回转减速电机驱动升降回转架旋转,从而将车辆旋转掉头,使得车辆的车头对着车库出口;
(11)升降回转架旋转到位后,主升降驱动系统继续驱动升降轿厢移动至出口所在的停车层;
(12)横移台车载着搬运器、车辆共同运行至出口相对应的位置;
(13)控制系统控制升降装置工作,将升降回转架顶起,使得升降回转架的下平面高于出口平台;
(14)控制系统控制驱动机构工作,平层机构的平层臂伸出;
(15)控制系统控制升降装置工作,使升降回转架下降,平层臂搭接在出口平台上,升降回转架上的搬运器轨道与出口平台导轨处于同一平面,实现平层功能;
(16)控制系统启动搬运器,搬运器将车辆搬运至出口平台上后返回横移台车;
(17)然后车库门自动打开,驾驶员将车驶离出口,完成取车;
(18)控制系统控制升降装置工作,使升降回转架上升;
(19)控制系统控制驱动机构工作,平层机构的平层臂缩回;
(20)控制系统控制升降装置工作,使升降回转架上升;
(21)横移台车载着搬运器、车辆共同运行至升降轿厢的中间位置;
(22)回转减速电机驱动升降回转架逆向旋转,升降回转架1恢复原位;
(23)控制系统控制升降装置工作,使升降回转架下降,升降回转架处于低位,恢复初始状态。
通过采用上述技术方案,省却了每个泊车位的平层定位装置,使得设备的结构更简单、生产成本低、安装效率高、调试方便。升降回转架上设有伸缩式平层机构,平层机构工作时升降回转架的载荷作用于机械式停车设备的钢结构框架上,进行存取车辆的动作时,搬运器将车辆搬运至升降回转架上或从升降回转架搬离,升降轿厢上的载荷不发生变化,链条或钢丝绳的伸长量也不发生变化,横移台车上智能搬运器的轨道与泊车位或出入口平台上的导轨的相对位置不变,平层精度高。
上述的具有平层装置和回转功能的横移台车存取车辆的方法,所述的回转装置包括回转支承和回转减速电机,回转支承的内圈固定于底盘上,回转支承的外圈上连接有销轴板,销轴板上设有销轴,升降回转架的下底面上设有定位板,定位板上设有与销轴相对应的销孔,回转支承的外圈的外壁上设有外齿,回转减速电机固定于底盘上,回转减速电机的输出轴上设置与回转支承外圈上的外齿相啮合的齿轮;
升降装置的举升器输出轴将升降回转架顶起时,销轴离开销孔;举升器的输出轴下降时,销轴插入销孔中,回转减速电机旋转驱动回转支承的外圈旋转,带动与其相连的销轴板旋转,销轴板上设有销轴,升降回转架的下底面上设有定位板,销轴插入销孔中,这样最终驱动升降回转架旋转;
通过采用上述技术方案,在取车过程中,横移台车不仅可在巷道内高速行走运送车辆,并且可以在高速运行的同时进行车辆回转,如使车辆在横移台车上旋转 180 度掉头,则可实现车辆前进入库、前进出库,因此本方案不需要在出入口(出入库室)中再设置车辆掉头所需的旋转空间,可以减少占地面积,且利用横移台车实现车辆掉头,可以大大节约存取车时间,提高立体车库的运行效率。
上述的具有平层装置和回转功能的横移台车存取车辆的方法,所述的升降装置包括左升降装置和右升降装置,左升降装置和右升降装置结构相同,均包括定位块、举升器、升降减速电机,举升器、升降减速电机固定于底盘上,升降减速电机的输出轴为双轴伸,双轴伸的两端分别与一根第一传动轴的一端相连,第一传动轴的另一端与举升器的输入端相连,举升器的输出轴的端部连接有定位轴;定位块上端与升降回转架相连,下端设有与定位轴相对应的定位槽。
通过采用上述技术方案,升降回转架下部连接有下端设有定位槽的定位块,举升器的输出轴的端部连接有定位轴;举升器的输出轴升起时其上端的定位轴进入定位块的定位槽中,将升降回转架顶起,定位槽可限制升降回转架在左右方向移动,继续顶起使得升降回转架的下平面高于立体停车设备钢结构的横梁;待伸缩式平层机构工作时,平层臂伸出,举升器的输出轴下降,定位轴脱离定位块的定位槽,平层臂搭接在立体停车设备钢结构的横梁上,实现平层功能;由于举升器固定于底盘上,定位轴与定位块的定位槽为开放式插入连接,平层后升降回转架与底盘脱离,进行存取车辆的动作时,链条或钢丝绳的长度会发生变化,但仅会造成底盘上下位置的变化,对升降回转架无影响,平层精度不会降低。
进一步地,所述举升器输出轴的上端部的竖向截面呈倒V形,所述的定位轴穿过该倒V形的斜面,定位块的下端与举升器输出轴的上端部相对应地设有竖向截面呈倒V形的凹槽。
通过采用上述技术方案,举升器的输出轴升起时其上端插入定位块下端的竖向截面呈倒V形的凹槽中,两V形的斜面相贴合,可限制升降回转架在前后方向移动。
上述的具有平层装置和回转功能的横移台车存取车辆的方法,所述的伸缩式平层机构包括左伸缩式平层机构和右伸缩式平层机构,左伸缩式平层机构和右伸缩式平层机构结构相同,均包括平层臂和驱动平层臂伸出或缩回的驱动机构;左伸缩式平层机构和右伸缩式平层机构分别设置于升降回转架的左右两端,可独立运行。
横移台车的左右两端分别设置一套可独立运行的伸缩式平层机构,左右两端均可进行平层定位,正常情况下左右两套伸缩式平层机构均工作。特殊情况下,当巷道仅在一侧设置泊车位时,如仅在左侧设置泊车位,只需横移台车左端的左升降装置、左伸缩式平层机构动作即可,左升降装置的升降减速电机驱动举升器工作,举升器的输出轴升起时其上端的定位轴进入定位块的定位槽中,将升降回转架左端顶起,使得升降回转架左端的下平面高于立体停车设备钢结构的横梁,定位槽可限制升降回转架在左右方向移动;顶起的过程中,升降回转架右端的定位块绕对应的定位轴转动;左伸缩式平层机构工作,平层臂伸出,举升器的输出轴下降,定位轴脱离定位块的定位槽,平层臂搭接在立体停车设备钢结构的横梁上,实现平层功能。
进一步地,所述的每一伸缩式平层机构均包括2个前后对称设置的平层臂,平层臂可滑动地设置于升降回转架上,驱动机构可同时驱动2个平层臂伸出或缩回。
通过采用上述技术方案,2个平层臂共用一套驱动机构,结构简单,且同步性好。
更进一步地,平层臂上连接有滑块,滑块可沿着导向轴滑动,导向轴的两端通过导向轴座连接于升降回转架上,驱动机构包括,
平层减速电机,连接于升降回转架上,输出轴为双轴伸,双轴伸的两端分别与一根第二传动轴的一端相连,
齿条导向座, 连接于升降回转架上,其上具有导套,
齿条轴,一端与平层臂的内端相连,可沿着导套的内孔滑动,
轴承座,连接于升降回转架上,
第二传动轴,一端与平层减速电机的输出轴相连,另一端转动连接于轴承座上且端部连接有主动齿轮,
过渡齿轮,与主动齿轮和齿条轴相啮合,转动连接于齿轮轴的一端,齿轮轴的另一端固定连接于升降回转架上;
平层减速电机转动,带动第二传动轴转动,第二传动轴端部的主动齿轮驱动过渡齿轮转动,过渡齿轮通过齿条轴带动平层臂伸出或缩回;
伸缩式平层机构未工作时,平层臂处于缩回状态;
伸缩式平层机构工作时,平层臂逐渐伸出,升降装置驱动升降回转架下降,平层臂的外端搭接在立体停车设备钢结构的横梁上,升降回转架与底盘分离,升降回转架上的搬运器轨道与泊车位导轨/出入口平台导轨处于同一平面,实现平层功能。
通过采用上述技术方案,当横移台车运行至与目标泊车位相对应的位置时,举升器将升降回转架顶起,并使得升降回转架的下平面高于立体停车设备钢结构的横梁;伸缩式平层机构工作时,平层臂伸出,然后升降回转架随着举升器的输出轴下降,平层臂搭接在立体停车设备钢结构的横梁上,使升降回转架上的搬运器轨道与泊车位导轨处于同一平面,实现平层功能。
本发明的有益效果:
1、省却了每个泊车位的平层定位装置,使得设备的结构更简单、生产成本低、安装效率高、调试方便;
2、横移台车的左右两端分别设置一套可独立运行的伸缩式平层机构,左右两端均可进行平层定位,正常情况下左右两套伸缩式平层机构均工作。特殊情况下,当巷道仅在一侧设置泊车位时,仅需设置泊车位的一侧的升降装置和伸缩式平层机构工作即可;
3、平层后升降回转架与底盘脱离,升降回转架的载荷作用于机械式停车设备的钢结构框架上。进行存取车辆的动作时,链条或钢丝绳的长度会发生变化,但仅会造成底盘上下位置的变化,对升降回转架无影响,平层精度不会降低。
4、在取车过程中,横移台车不仅可在巷道内高速行走运送车辆,并且可以在高速运行的同时进行车辆回转,如使车辆在横移台车上旋转 180 度掉头,则可实现车辆前进入库、前进出库,因此本方案不需要在出入口(出入库室)中再设置车辆掉头所需的旋转空间,可以减少占地面积,且利用横移台车实现车辆掉头,可以大大节约存取车时间,提高立体车库的运行效率。
附图说明
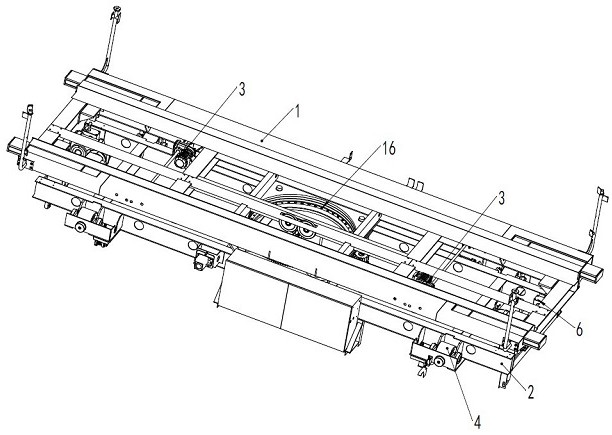
图1为本发明的轴测示意图(平层臂未伸出)。
图2为本发明的轴测示意图(平层臂伸出)。
图3为本发明的侧视示意图(升降回转架位于低位)。
图4为本发明的侧视示意图(升降回转架位于高位)。
图5为本发明中升降回转架的示意图。
图6为本发明中底盘的示意图。
图7为本发明中伸缩式平层机构的轴测示意图。
图8为本发明中升降装置的轴测示意图。
图9为本发明中回转装置的示意图;
图10-11为本发明中回转装置的局部放大示意图;
图12为本发明与轿厢、泊车位的侧视示意图。
图13为本发明与轿厢、泊车位的平面示意图。
图中:1升降回转架,1-1定位块,1-2搬运器轨道,1-3电机安装板,1-4定位板,1-5销孔,
2底盘,2-1升降装置安装座,
3伸缩式平层机构,3-1平层臂,3-2齿条轴,3-3齿条导向座,3-4过渡齿轮,3-5主动齿轮,3-6第二传动轴,3-7平层减速电机,3-8导向轴,3-9滑块,3-10导向轴座,3-11轴承座,
4被动行走系统,5主动行走系统,
6升降装置,6-1第一传动轴,6-2举升器,6-3举升器的输出轴,6-4定位轴,6-5升降减速电机,
7左泊车位,8钢结构左横梁,9横移台车,10搬运器,11升降轿厢,12钢结构右横梁,13右泊车位,14竖直轨道,15吊点座,
16回转装置,16-1回转减速电机,16-2齿轮,16-3回转支承的外圈,16-4回转支承的内圈,16-5销轴板,16-6销轴。
具体实施方式
为能清楚说明本方案的技术特点,下面通过非限定性的实施例并结合附图对本发明做进一步的说明。
本发明所述的前、后、左、右方向是依据附图所示前、后、左、右方向进行的描述。为了便于说明,仅示出了与本发明实施例有关的部分。
实施例一:
一种具有平层装置和回转功能的横移台车存入车辆的方法,该方法采用具有伸缩式自动平层装置和回转功能的横移台车存入车辆,图1至图11是一种具有伸缩式自动平层装置的垂直升降类机械式停车设备用横移台车的示意图,包括升降回转架1、底盘2和控制系统,搬运器轨道1-2设置于升降回转架1上,底盘2上设置有被动行走系统4、主动行走系统5;主动行走系统5驱动横移台车9沿着升降轿厢11上的导轨前后移动,搬运器10可沿着搬运器轨道1-2在升降回转架1上左右移动;
横移台车9上具有供电系统、护栏以及激光测距定装置、有无空位检测装置(泊车位上是否有车辆)、车辆超长检测装置、有无车辆检测装置(搬运器10上是否有车辆)、有无搬运器检测装置(横移台车9上是否有搬运器10)等检测系统、无线通讯接收系统、控制系统均为模块化的通用部件,本实施例的控制系统包括PLC、继电器等,设置于供电系统中的电控柜内(图中未示出)。
请参阅图9-11,升降回转架1与底盘2之间设置有回转装置16,回转装置16驱动升降回转架1相对于底盘2做回转运动;回转装置16包括回转支承和回转减速电机16-1,回转支承的内圈16-4固定于底盘2上,回转支承的外圈16-3上连接有销轴板16-5,销轴板16-5上设有销轴16-6,升降回转架1的下底面上设有定位板1-4,定位板1-4上设有与销轴16-6相对应的销孔1-5,回转支承的外圈16-3的外壁上设有外齿,回转减速电机16-1固定于底盘2上,回转减速电机16-1的输出轴上设置与回转支承外圈上的外齿相啮合的齿轮16-2。
请参阅图8,升降回转架1与底盘2之间设置有升降装置6,升降装置6驱动升降回转架1相对于底盘2做升降运动;升降装置6包括左升降装置和右升降装置,左升降装置和右升降装置分别通过升降装置安装座2-1安装于底盘2的两端,左升降装置包括定位块1-1、举升器6-2、升降减速电机6-5,举升器6-2、升降减速电机6-5固定于底盘2上,升降减速电机6-5的输出轴为双轴伸,双轴伸的两端分别与一根第一传动轴6-1的一端相连,第一传动轴6-1的另一端与举升器6-2的输入端相连,举升器的输出轴6-3的端部连接有定位轴6-4;定位块1-1上端与升降回转架1相连,下端设有与定位轴6-4相对应的开口朝下的定位槽,用于对升降回转架1进行左右方向的定位。举升器6-2为现有技术,如本申请人获得的201520766666.8号实用新型专利,不再赘述。
本实施例中,升降减速电机6-5的输出端还可以是空心输出轴且带有键槽的结构,与之配合的第一传动轴6-1为带平键的一根实心轴,第一传动轴6-1通过键与升降减速电机6-5空心输出轴联接并进行径向固定。
本实施例中,举升器输出轴的上端部的竖向截面呈倒V形,所述的定位轴6-4穿过该倒V形的斜面,定位块1-1的下端与举升器输出轴的上端部相对应地设有竖向截面呈倒V形的凹槽。举升器的输出轴6-3升起时其上端插入定位块1-1下端的竖向截面呈倒V形的凹槽中,两V形的斜面相贴合,可以对升降回转架1进行前后方向的定位。右升降装置与左升降装置结构相同,不再赘述。
所述升降回转架1的的左右两端分别设有一套可独立运行的伸缩式平层机构3,包括左伸缩式平层机构和右伸缩式平层机构,左伸缩式平层机构和右伸缩式平层机构结构相同,是横移台车9中的通用部件,适用于伸缩齿型和抱夹轮胎型的搬运器,也适用于升降梳齿型的搬运器,请参阅图7,上述的左伸缩式平层机构包括2个前后对称设置的平层臂3-1,平层臂3-1可滑动地设置于升降回转架1上,驱动机构可同时驱动2个平层臂3-1伸出或缩回。具体地,平层臂3-1上连接有2个滑块3-9,滑块3-9可沿着导向轴3-8滑动,导向轴3-8的两端各通过1个导向轴座3-10连接于升降回转架1上。右伸缩式平层机构与左伸缩式平层机构结构相同,不再赘述。
驱动机构包括齿条轴3-2,齿条导向座3-3,过渡齿轮3-4,主动齿轮3-5,第二传动轴3-6,平层减速电机3-7,轴承座3-11,
平层减速电机3-7通过电机安装板1-3连接于升降回转架1上,输出轴为双轴伸,双轴伸的两端分别与一根第二传动轴3-6的一端相连;齿条导向座3-3连接于升降回转架1上,其上具有导套;齿条轴3-2的一端与平层臂3-1的内端相连,可沿着导套的内孔滑动;轴承座3-11连接于升降回转架1上,第二传动轴3-6的一端与平层减速电机3-7的输出轴相连,另一端转动连接于轴承座3-11上且端部连接有主动齿轮3-5;过渡齿轮3-4与主动齿轮3-5和齿条轴3-2相啮合,过渡齿轮3-4转动连接于齿轮轴的一端,齿轮轴的另一端固定连接于升降回转架1上;本实施例中轴承座3-11采用带方形座顶丝外球面球轴承。
本实施例中,平层减速电机3-7的输出端还可以是空心输出轴且带有键槽的结构,与之配合的第二传动轴3-6为带平键的一根实心轴,第二传动轴3-6通过键与平层减速电机3-7空心输出轴联接并进行径向固定,带方形座顶丝外球面球轴承自带顶丝,可以对第二传动轴3-6进行轴向固定。
请参阅图12、图13,平层减速电机3-7转动,带动第二传动轴3-6转动,第二传动轴3-6端部的主动齿轮3-2驱动过渡齿轮3-4转动,过渡齿轮3-4通过齿条轴3-2带动平层臂3-1伸出或缩回;
伸缩式平层机构3未工作时,平层臂3-1处于缩回状态;
伸缩式平层机构3工作时,平层臂3-1逐渐伸出,升降装置6驱动升降回转架1下降,平层臂3-1的外端搭接在立体停车设备钢结构的横梁上,升降回转架1与底盘2分离,升降回转架1上的搬运器轨道与泊车位导轨/出入口平台导轨处于同一平面,实现平层功能。
升降减速电机6-5、平层减速电机3-7均与控制系统相连接。
下面结合附图说明本实施例的工作过程:
图12、图13为存取车辆的示意图,巷道两侧侧均设置有泊车位,以下以存入左泊车位车辆为例说明本实施例存车的工作过程,工作时左升降装置和右升降装置同时工作,左伸缩式平层机构和右伸缩式平层机构同时工作。
横移台车9在不存取车辆时,伸缩式平层机构3处于非工作状态,平层臂3-1处于缩回状态,不影响横移台车9在升降轿厢11内正常运行。
具体步骤如下:
初始状态:升降装置6的举升器的输出轴6-3处于行程的低位,此时升降回转架1处于低位;平层臂3-1处于缩回状态;
(1)横移台车9及停放在横移台车9上方的搬运器10共同运行至停放车辆的车库入口处,控制系统控制升降减速电机6-5工作,举升器的输出轴6-3升起,将升降回转架1顶起,继续顶起使得升降回转架1的下平面高于入口平台;
(2)控制系统控制平层减速电机3-7工作,平层臂3-1伸出;
(3)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,平层臂3-1搭接在入口平台上,使升降回转架1上的搬运器轨道与入口平台导轨处于同一平面,实现平层功能;
(4)控制系统启动搬运器10,将停放在入口平台上的车辆搬运至搬运器10上,然后一同返回横移台车9;
(5)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3上升;
(6)控制系统控制平层减速电机3-7工作,平层臂3-1缩回;
(7)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,升降回转架1处于低位;
(8)主升降驱动系统驱动提升链条,提升链条连接升降轿厢11上的吊点座15,驱动升降轿厢11沿着钢结构上设置的竖直轨道14运行至目标停车层,随后横移台车9载着搬运器10、车辆共同运行至指定的左泊车位7;
(9)控制系统控制升降减速电机6-5工作,举升器的输出轴6-3升起,将升降回转架1顶起,继续顶起使得升降回转架1的下平面高于立体停车设备钢结构的横梁;
(10)控制系统控制平层减速电机3-7工作,平层臂3-1伸出;
(11)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,平层臂3-1搭接在立体停车设备钢结构的横梁上,使升降回转架1上的搬运器轨道与泊车位导轨处于同一平面,实现平层功能;
(12)控制系统启动搬运器10,搬运器10将车辆搬运至左泊车位7上后返回横移台车9;
(13)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3上升;
(14)控制系统控制平层减速电机3-7工作,平层臂3-1缩回;
(15)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,升降回转架1处于低位,恢复初始状态;至此存放车辆动作完成。
实施例二:
一种具有平层装置和回转功能的横移台车取出车辆的方法,该方法采用具有伸缩式自动平层装置和回转功能的横移台车取出车辆,图1至图11是一种具有伸缩式自动平层装置的垂直升降类机械式停车设备用横移台车的示意图,具体结构同实施例一,不再详述。
下面结合附图说明本实施例的工作过程:
图12、图13为取出车辆的示意图,巷道两侧侧均设置有泊车位,以下以取出左泊车位车辆为例说明本实施例取车的工作过程,工作时左升降装置和右升降装置同时工作,左伸缩式平层机构和右伸缩式平层机构同时工作。
横移台车9在不存取车辆时,伸缩式平层机构3处于非工作状态,平层臂3-1处于缩回状态,不影响横移台车9在升降轿厢11内正常运行。
具体步骤如下:
初始状态:升降装置6的举升器的输出轴6-3处于行程的低位,此时升降回转架1处于低位;平层臂3-1处于缩回状态;
(1)控制系统下达取出车辆命令后,主升降驱动系统驱动提升链条,提升链条连接升降轿厢11上的吊点座15,驱动升降轿厢11沿着钢结构上设置的竖直轨道14运行至目标停车层,横移台车9载着搬运器10共同运行至存放车辆的左泊车位7;
(2)控制系统控制升降减速电机6-5工作,举升器的输出轴6-3升起,将升降回转架1顶起,继续顶起使得升降回转架1的下平面高于立体停车设备钢结构的横梁;
(3)控制系统控制平层减速电机3-7工作,平层臂3-1伸出;
(4)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,平层臂3-1搭接在立体停车设备钢结构的横梁上,使升降回转架1上的搬运器轨道与泊车位导轨导轨处于同一平面,实现平层功能;
(5)控制系统启动搬运器10,将停放在左泊车位7上的车辆搬运至搬运器10上,然后一同返回横移台车9;
(6)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3上升;
(7)控制系统控制平层减速电机3-7工作,平层臂3-1缩回;
(8)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,升降回转架1处于低位;
(9)横移台车9载着搬运器10、车辆共同运行至升降轿厢11的中间位置;
(10)主升降驱动系统驱动升降轿厢11向出口所在的停车层移动,在移动过程中、到达出口所在的停车层之前,回转减速电机16-1驱动升降回转架1旋转,从而将车辆旋转掉头,使得车辆的车头对着车库出口;
(11)升降回转架1旋转到位后,主升降驱动系统继续驱动升降轿厢11移动至出口所在的停车层;
(12)横移台车9载着搬运器10、车辆共同运行至出口相对应的位置;
(13)控制系统控制升降减速电机6-5工作,举升器的输出轴6-3升起,将升降回转架1顶起,继续顶起使得升降回转架1的下平面高于出口平台;
(14)控制系统控制平层减速电机3-7工作,平层臂3-1伸出;
(15)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,平层臂3-1搭接在出口平台上,使升降回转架1上的搬运器轨道与出口平台导轨处于同一平面,实现平层功能;
(16)控制系统启动搬运器10,搬运器10将车辆搬运至出口平台上后返回横移台车9;
(17)然后车库门自动打开,驾驶员将车开出,完成取车;
然后,还需完成以下步骤,使横移台车恢复初始状态,以备迎接下一个存车或取车过程:
(1)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3上升;
(2)控制系统控制平层减速电机3-7工作,平层臂3-1缩回;
(3)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3上升;
(4)横移台车9载着搬运器10、车辆共同运行至升降轿厢11的中间位置;
(5)回转减速电机16-1驱动升降回转架1逆向旋转,升降回转架1恢复原位;
(6)控制系统控制升降减速电机6-5工作,升降回转架1随着举升器的输出轴6-3下降,升降回转架1处于低位,恢复初始状态。
- 具有平层装置和回转功能的横移台车存取车辆的方法
- 具有伸缩式自动平层装置的横移台车存取车辆的方法