一种晶棒旋转定位夹持装置
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及旋转夹持装置技术领域,特别是一种晶棒旋转定位夹持装置。
背景技术
晶棒是重要的光伏发电原材料,近年来随着光伏行业突飞猛进的发展,晶棒的产能持续增加,在晶棒的生产过程中,需要用金刚石刀具进行切割,将按照技术要求切割好的晶棒进行电学和结构性测试,在晶棒切割完成后一般由人工将切割好的晶棒进行转移,工作效率比较低,并且人工进行转移时,容易造成晶棒表面污染,现有晶棒夹持装置适用范围比较小,一种夹持装置只适用于一种规格的晶棒,实用性比较低。
经检索,申请号为201420707881.4,名称为一种晶棒夹持装置的中国专利,公开了一种晶棒夹持装置,该装置通过通过驱动电机带动电机联轴器进行工作,电机联轴器带动左旋丝杆和右旋丝杆想同一方向旋转,左丝杆螺母向右移动,右丝杆螺母向左移动,实现左侧和右侧的夹持手爪同时向中间靠拢,该装置能够实现对晶棒的抓取,但是该装置在抓取圆柱形晶棒时,容易滑落,并且不适用于多种不同规格晶棒的抓取,适用范围比较小。
发明内容
本发明的目的是为了解决上述问题,设计了一种晶棒旋转定位夹持装置,包括机架,所述机架上设置有能够将装置进行转动的旋转机构,所述旋转机构连接有进行高度调节的升降机构,所述升降机构连接有伸缩机构,所述伸缩机构伸缩端连接有连接架,所述连接架上设置有能够根据不同晶棒进行调节的夹具移动机构,所述夹具移动机构上连接有对晶棒进行夹持的夹取机构,所述机架底部设置有减震机构。
所述夹具移动机构包括丝杠模组,所述丝杠模组固定在所述连接架上,所述丝杠模组上连接有电机A,所述丝杠模组连接有丝杠连接架,所述丝杠连接架连接有滑块,所述滑块内部嵌装有导轨,所述导轨固定在所述连接架上,所述导轨与所述滑块之间相配合滑动设置,所述导轨侧方固定设置有固定支架,所述固定支架侧方固定连接有限位板。
所述夹取机构包括夹具和传感器A,所述夹具设置有两组,一组所述夹具固定在滑块上,另一组所述夹具固定在固定支架上,所述夹具上设置有调节部分,所述夹具底部内侧设置有柔性垫,所述传感器A贯穿固定在所述夹具底部,所述传感器A顶部与所述柔性垫相连。
所述调节部分包括升降气缸和滑槽,所述升降气缸固定在滑块和固定支架上,所述滑槽设置在所述夹具上,所述滑槽内部嵌装有升降滑块,所述升降滑块与所述滑槽之间相配合滑动设置,所述升降滑块与所述升降气缸的伸缩端相连,所述升降滑块连接有压块,所述压块顶端设置有传感器B,所述压块底端设置有弹性垫,所述传感器B头部与所述弹性垫相连。
所述旋转机构包括转动盘,所述转动盘设置在所述机架顶部,所述转动盘连接有转动轴,所述转动轴贯穿于所述机架,并且所述转动轴伸入到所述机架内部,所述转动轴上设置有大锥齿轮A,所述大锥齿轮A连接有大锥齿轮B,所述大锥齿轮B固定在所述机架内部侧方,所述大锥齿轮B连接有小锥齿轮,所述小锥齿轮连接有电机B,所述小锥齿轮固定在所述电机B的输出端。
所述伸缩机构包括伸缩杆A,所述伸缩杆A与所述升降机构相连,所述伸缩杆A为中空结构,所述伸缩杆A内部设置有伸缩杆B,所述伸缩杆B顶部固定在所述连接架上,所述伸缩杆A上设置有气缸固定支架A,所述气缸固定支架A上设置有伸缩气缸,所述伸缩气缸中部设置有气缸固定支架B,所述伸缩气缸伸缩端与所述连接架相连。
所述升降机构包括连接块和气缸,所述连接块固定在所述气缸伸缩端顶部,所述气缸底部设置有螺栓,所述气缸通过所述螺栓固定在转动盘上。
所述夹具外侧设置有定位传感器。
所述减震机构包括减震支架,所述减震支架与所述机架相连,所述减震支架上套装有弹簧A,所述减震支架连接有减震块,所述减震块内部设置有弹簧B,所述弹簧B一端与所述减震支架相连,所述弹簧B另一端固定在所述减震块内部底端,所述减震块底部连接有减震垫。
利用本发明的技术方案制作的一种晶棒旋转定位夹持装置,所达到的有益效果:本装置结构简单,实用性强,适用范围广,能够实现多种不同规格晶棒的夹持,通过设置有旋转机构和升降机构能够实现将晶棒从上一工位转移到下一工位当中,利用夹取机构能够实现对晶棒的夹取和移动,同时由于夹取机构设置有调节部分,结合夹具移动机构,能够实现对多种规格和形状晶棒的夹取,同时还能够防止晶棒在夹持过程中发生移动,通过设置有减震机构能够减少晶棒转移过程中发生的震动,避免晶棒掉落发生损毁。
附图说明
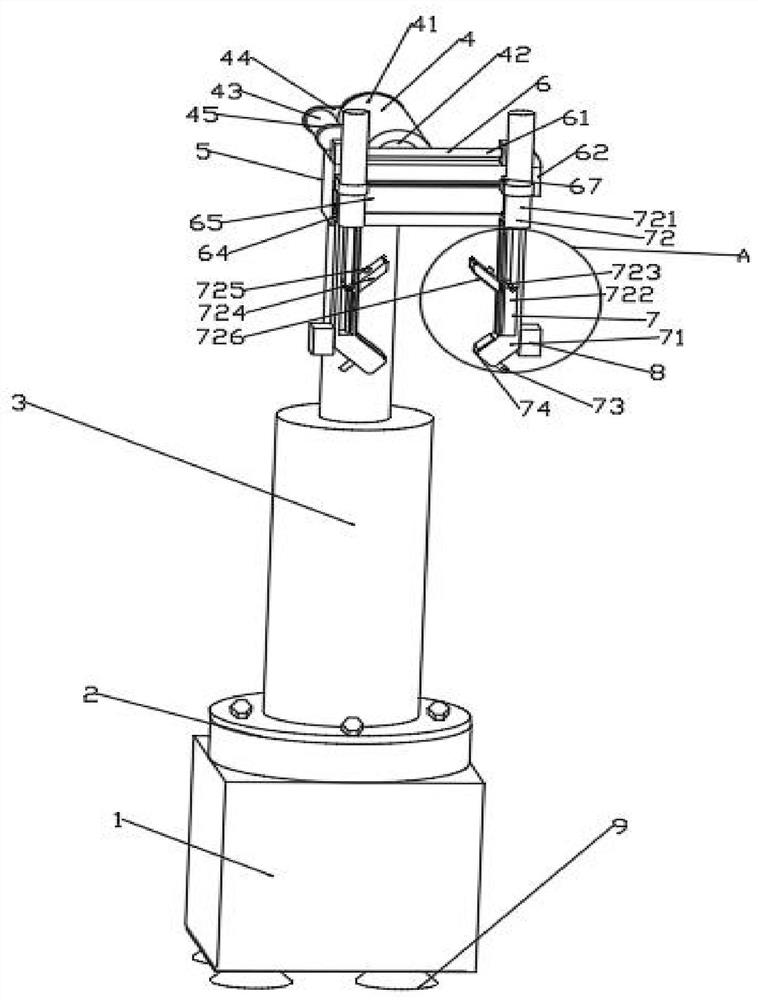
图1是本发明所述一种晶棒旋转定位夹持装置的整体结构图;
图2是本发明所述一种晶棒旋转定位夹持装置的A处放大图;
图3是本发明所述一种晶棒旋转定位夹持装置的旋转机构结构图;
图4是本发明所述一种晶棒旋转定位夹持装置的侧视图;
图5是本发明所述一种晶棒旋转定位夹持装置的减震机构结构图。图中,1机架;2、旋转机构;3、升降机构;4、伸缩机构;5、连接架;6、夹具移动机构;7、夹取机构;8、定位传感器;9、减震机构;21、转动盘;22、转动轴;23、大锥齿轮A;24、大锥齿轮B;25、小锥齿轮;26、电机B;31、连接块;32、气缸;41、伸缩杆A;42、伸缩杆B;43、伸缩气缸;44、气缸固定支架A;45、气缸固定支架B;61、丝杠模组;62、电机A;63、丝杠连接架;64、滑块;65、导轨;66、限位板;67、固定支架;71、夹具;72、调节部分;73、传感器A;74、柔性垫;721、升降气缸;722、滑槽;723、升降滑块;724、压块;725、传感器B;726、弹性垫;91、减震支架;92、弹簧A;93、弹簧B;94、减震垫;95、减震块。
具体实施方式
为了更好的理解本发明,下面结合具体实施例和附图对本发明进行进一步的描述,如图1所示,一种晶棒旋转定位夹持装置,包括机架1,机架1内部为中空结构,机架1上设置有能够将装置进行转动的旋转机构2,通过设置有旋转机构2能够实现将晶棒在上一工位转移到下一工位当中,旋转机构2连接有进行高度调节的升降机构3,通过设置有升降机构3便于对晶棒进行抓取,升降机构3连接有伸缩机构4,利用伸缩机构4能够实现将晶棒放置在不同位置,实用性强,伸缩机构4伸缩端连接有连接架5,连接架5上设置有能够根据不同晶棒进行调节的夹具移动机构6,利用夹具移动机构6能够实现对不同规格的晶棒的夹取,适用范围广,夹具移动机构6上连接有对晶棒进行夹持的夹取机构3,通过设置有夹取机构3能够将晶棒进行夹取和卡住,防止晶棒在移动过程中发生滑动,导致晶棒掉落损毁,机架1底部设置有减震机构9,通过设置有减震机构9能够防止晶棒转移过程中发生较大震动,导致晶棒在夹持过程中掉落。
夹具移动机构6包括丝杠模组61,丝杠模组61包括丝杠和套装在丝杠上的移动块,通过设置有丝杠模组61能够实现取机构的移动,丝杠模组61固定在连接架5上,丝杠模组61上连接有电机A62,电机A62是丝杠模组61的驱动装置,通过电机A62带动丝杠模组61进行工作,丝杠模组61连接有丝杠连接架63,丝杠模组61中移动块和丝杠连接架63相连,通过丝杠连接架63带动滑块64进行移动,丝杠连接架63连接有滑块64,滑块64内部嵌装有导轨65,导轨65固定在连接架5上,导轨65与滑块64之间相配合滑动设置,利用滑块64与导轨65带动夹取机构7进行移动,同时导轨65还有导向作用,防止夹取机构7运动偏离方向,导轨65侧方固定设置有固定支架67,固定支架67侧方固定连接有限位板66,限位板66固定在连接架5上,固定支架67固定在限位板66上,电机A62固定在限位板66上,当进行晶棒夹取时,电机A62带动丝杠模组61进行工作,丝杠模组61上的移动块通过丝杠连接架63带动滑块64先向左侧移动,待将晶棒放入到夹取机构7后,丝杠连接架63带动滑块64再向右侧移动,实现对晶棒的夹取。
夹取机构7包括夹具71和传感器A73,夹具71设置有两组,一组夹具71固定在滑块64上,另一组夹具71固定在固定支架67上,右侧夹具71底部较短,便于进行夹取,夹具71内侧设置有软垫,软垫为橡胶材质,通过软垫能够防止晶棒被夹具7划伤,造成晶棒的损毁,同时还能够利用软垫的摩擦力防止晶棒在夹持过程中发生移动,利用夹具71实现对晶棒夹持,夹具71上设置有调节部分72,通过调节部分72能够实现对不同规格的晶棒的夹持,同时还能防止晶棒在夹持过程中发生滑动,夹具71底部内侧设置有柔性垫74,柔性垫74为橡胶材质,柔性垫74能够防止夹具71底部在夹持移动过程中将晶棒划伤,同时柔性垫74在夹持过程中发生弹性形变,能够给传感器A73一个力的作用,传感器A73贯穿固定在夹具71底部,传感器A73顶部与柔性垫74相连,柔性垫74在夹持过程中会受到晶棒的挤压,发生弹性形变,从而给传感器A73一个信号,传感器A73接收到这个信号后回给电机A62进行反馈,使电机A62停止工作,防止夹持过程中,由于夹具71夹持力过大导致晶棒断裂。
如图2所示,调节部分72包括升降气缸721和滑槽722,升降气缸721为升降滑块723移动的驱动装置,通过设置有升降气缸721能够实现升降滑块723的上下移动,升降气缸721固定在滑块64和固定支架67上,滑槽722设置在夹具71上,通过设置有滑槽722能够实现升降滑块723的移动,滑槽722内部嵌装有升降滑块723,升降滑块723与滑槽722之间相配合滑动设置,升降滑块723与升降气缸721的伸缩端相连,通过升降气缸721带动升降滑块722进行在滑槽722中进行移动,升降滑块723连接有压块724,通过压块724实现对晶棒的压紧和夹持,压块724顶端设置有传感器B725,传感器B725贯穿于压块724,压块724底端设置有弹性垫726,弹性垫726位橡胶材质,晶棒夹持过程中,弹性垫726会发生弹性形变,给传感器B725一个信号,使升降气缸721停止运动,此时压块724给晶棒一个较小的向下的压力,能够将晶棒压紧,结合弹性垫726的摩擦力,能够防止晶棒在夹持过程中发生移动,传感器B725头部与弹性垫726相连,当对晶棒进行夹持时,升降气缸721的伸缩端处于最高位置,即升降滑块723处于最高位置中,当晶棒处于夹具71中时,升降气缸721伸缩端向下移动,升降滑块723带动压块724向下移动,使弹性垫726与晶棒接触,发生弹性形变,此时压力传感器B725会给升降气缸721一个信号,使升降气缸721停止运动,防止升降气缸721向下运动将晶棒压碎。
如图3所示,旋转机构2包括转动盘21,转动盘21设置在机架1顶部,转动盘21连接有转动轴22,通过设置有转动轴22带动转动盘21进行转动,转动轴22贯穿于机架1,并且转动轴22伸入到机架1内部,转动轴22上设置有大锥齿轮A23,大锥齿轮A23连接有大锥齿轮B24,大锥齿轮A23与大锥齿轮B24之间啮合,并且大锥齿轮A23与大锥齿轮B24之间的传动比小于1,大锥齿轮B24固定在机架1内部侧方,大锥齿轮B24连接有小锥齿轮25,小锥齿轮25连接有电机B26,小锥齿轮25固定在电机B26的输出端,通过电机B26带动小锥齿轮25进行转动,小锥齿轮25与大锥齿轮B24啮合,从而带动大锥齿轮B24进行转动,大锥齿轮B24带动转动轴22和转动盘21进行转动。
如图4所示,伸缩机构4包括伸缩杆A41,伸缩杆A41与升降机构3相连,伸缩杆A41为中空结构,伸缩杆A41内部设置有伸缩杆B42,伸缩杆B42顶部固定在连接架5上,伸缩杆A41上设置有气缸固定支架A44,气缸固定支架A44上设置有伸缩气缸43,伸缩气缸43中部设置有气缸固定支架B45,伸缩气缸42伸缩端与连接架5相连。
升降机构3包括连接块31和气缸32,连接块31固定在气缸32伸缩端顶部,气缸32底部设置有螺栓33,气缸32通过螺栓33固定在转动盘21上,通过设置有气缸32实现夹取机构7地上下移动,便于进行夹取,同时气缸32连接有转动盘21实现本装置的转动,能够实现晶棒从上一工位的转移。
夹具71外侧设置有定位传感器8,通过设置有定位传感器8能够实现将晶棒准确放入到下一工位中。
如图5所示,减震机构9包括减震支架91,减震支架91与机架1相连,减震支架91上套装有弹簧A92,减震支架91连接有减震块95,减震块95内部设置有弹簧B93,弹簧B93一端与减震支架91相连,弹簧B93另一端固定在减震块95内部底端,减震块95底部连接有减震垫94,通过设置有减震机构9能够减少夹持晶棒过程中的震动,防止晶棒在夹持过程中发生掉落。
工作过程:首先在夹取晶棒之前,电机A62带动丝杠模组61进行移动,使滑块64移动到最左端,然后对晶棒进行夹取,气缸32伸缩端向上移动,伸缩气缸43带动伸缩杆B42向前移动调节,移动到晶棒正上方,气缸32伸缩端向下移动,使晶棒进入到夹取机构7中,此时升降气缸721的伸缩端处于最上方,电机A62带动丝杠模组61向右移动,使滑块64带动夹具71将晶棒夹住,夹持完成后传感器A73接收到一个信号,使电机A62停止工作,同时升降气缸721的伸缩端带动滑块723在滑槽722中向下移动,当弹性垫726与晶棒接触,发生弹性形变,此时压力传感器B725会给升降气缸721一个信号,使升降气缸721停止运动,当晶棒夹持完成后,气缸32伸缩端向上移动,然后电机B26带动小锥齿轮25进行转动,从而带动大锥齿轮B24进行转动,大锥齿轮B24带动转动轴22和转动盘21进行转动,转动到另一边,升降机构3和伸缩装置4再进行运动,使夹具机构7位于晶棒放置区上正上方,再通过升降机构3和伸缩装置4进行运动,夹取机构7在丝杠模组62的运动下打开,将晶棒进行放置。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
- 一种晶棒旋转定位夹持装置
- 一种防晶棒掉落操作方法及带防晶棒掉落夹持装置的晶体生长炉