驾驶辅助装置
文献发布时间:2023-06-19 10:06:57
技术领域
本公开涉及驾驶辅助装置。
背景技术
作为与驾驶辅助装置有关的技术,在日本特开2017-095100中公开了用于避免与行人(目标物)的冲突(碰撞)的车辆用的冲突回避(避撞)系统。根据日本特开2017-095100中记载的技术,当在自身车辆的前方检测到行人的情况下,进行转向(操舵)控制以使得绘制与该行人保持一定距离的轨迹。
发明内容
在如上述那样的驾驶辅助装置中,若在自身车辆的前方检测到多个目标物,则会针对各个目标物进行转向控制。此时,虽然可考虑进行为了抑制蛇行而使操舵量减小的控制,但是在该情况下,自身车辆与目标物之间的横向距离变小,由此可能会使自身车辆的乘员产生不适感(违和感)(自身车辆从接近目标物的位置高速通过)。
本公开提供能够抑制自身车辆的乘员的不适感的驾驶辅助装置。
本公开的一个方面涉及一种驾驶辅助装置,其进行转向控制及减速控制以避开在自身车辆的前方检测出的目标物,该驾驶辅助装置:计算目标横向距离,该目标横向距离是自身车辆从目标物的旁边通过时的自身车辆与目标物之间的横向距离,转向控制以目标横向距离为目标;在目标横向距离小于阈值的情况下,由阈值减去目标横向距离所得到的差量越大,则将目标减速度设得越大,该目标减速度是自身车辆从目标物的旁边通过时的自身车辆的减速度,减速控制以目标减速度为目标。
在该驾驶辅助装置中,在转向控制的目标横向距离小于阈值的情况下,目标横向距离与阈值的差量越大,则将减速控制的目标减速度设得越大。由此,在进行了转向控制及减速控制以避开目标物时,能够抑制自身车辆从接近目标物的位置高速通过,能够抑制自身车辆的乘员的不适感。
在一个实施方式中,也可以为,驾驶辅助装置具备:第1处理部,其根据一个或多个目标物的类别,按一个或多个目标物的每一个取得阈值;第2处理部,其基于自身车辆的车速、自身车辆的位置、自身车辆所行驶的道路的道路宽度及一个或多个目标物的位置,计算风险势场(potential field,潜在域);第3处理部,其基于自身车辆的车速、自身车辆的位置、风险势场及与一个或多个目标物有关的阈值,计算与一个或多个目标物有关的目标横向距离及差量;以及第4处理部,其在关于一个或多个目标物中的至少某一个目标物,目标横向距离小于阈值的情况下,与该目标物有关的差量越大,则将与该目标物有关的目标减速度设得越大。由此,能够进行使用风险势场的转向控制以及与之协同工作的减速控制。
在一个实施方式中,也可以为,在检测出与自身车辆的距离在第一预定距离以下的一个或多个目标物的情况下,周期性地重复执行第1处理部及第2处理部的处理,并在检测出与自身车辆的距离在比第一预定距离小的第二预定距离以下的一个或多个目标物的情况下,周期性地重复执行第3处理部及第4处理部的处理。在该情况下,例如在存在多个与自身车辆的距离在第一预定距离以下的目标物的情况下,能够计算将多个有关目标物考虑为回避对象的风险势场。另外,第3处理部及第4处理部的处理并非在检测出与自身车辆的距离在第一预定距离以下的目标物后进行,而是在检测出与自身车辆的距离在第二预定距离以下的目标物后进行。因此,能够抑制计算负荷的增大。
根据本公开的各种方面以及实施方式,能够抑制自身车辆的乘员的不适感。
附图说明
以下,参照附图对本发明的示例性实施方式的特征、优点以及技术和产业意义进行说明,在附图中相同的附图标记表示相同的要素,并且其中:
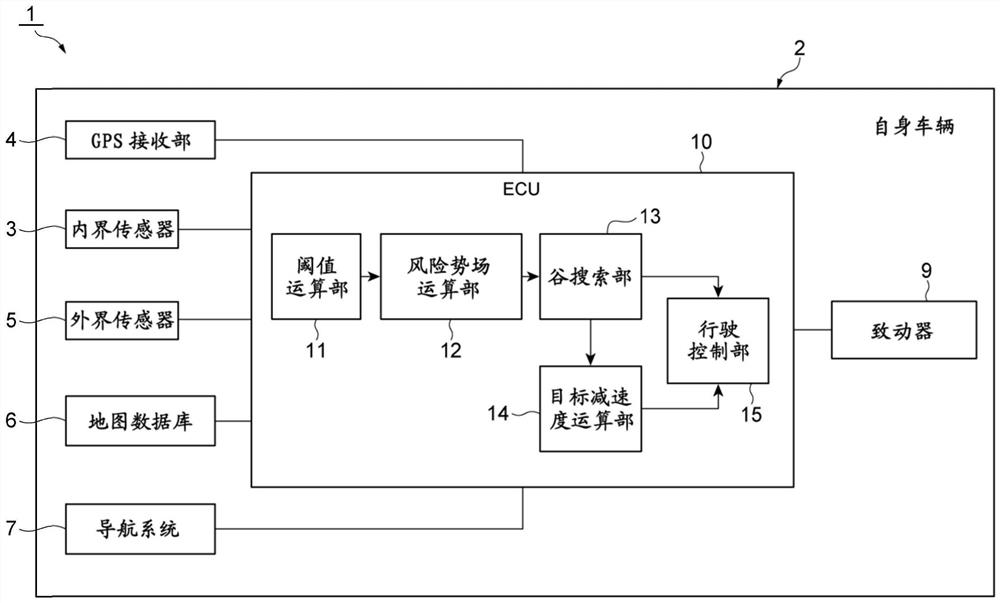
图1是包括第1实施方式涉及的驾驶辅助装置的自身车辆的功能框图。
图2A是表示在目标减速度的运算中使用的映射(map)的例子的图。
图2B是表示在目标减速度的运算中使用的另一映射的例子的图。
图3是例示第1实施方式涉及的驾驶辅助装置的处理的流程图。
图4是例示第1实施方式涉及的驾驶辅助装置的其他处理的流程图。
图5A是表示通过第1实施方式涉及的驾驶辅助装置回避多个目标物的情况下的例子的图。
图5B是表示图5A的后续的图。
图6A是表示图5B的后续的图。
图6B是表示图6A的后续的图。
图7是包括第2实施方式涉及的驾驶辅助装置的自身车辆的功能框图。
具体实施方式
以下,参照附图,对例示性的实施方式进行说明。此外,在以下的说明中,对相同或相当的要素标注相同的符号,不反复进行重复的说明。
[第1实施方式]
图1是包括第1实施方式涉及的驾驶辅助装置1的自身车辆2的功能框图。如图1所示,驾驶辅助装置1搭载于乘用车等自身车辆2。驾驶辅助装置1进行转向控制及减速控制以避开在自身车辆2的前方检测出的目标物。目标物包括静止物体(固定障碍物)以及移动物体(移动障碍物)。
静止物体例如是路面涂装(包括白线、黄线等车道边界线)以及构造物(路缘石、杆、电线杆、建筑物、标志、树木等)。移动物体例如是行人、自行车、婴儿车以及其他车辆等。自身车辆2具备内界传感器3、GPS接收部4、外界传感器5、地图数据库6、导航系统7、致动器9以及ECU(Electronic Control Unit,电子控制单元)10。
内界传感器3是检测自身车辆2的行驶状态的检测设备。内界传感器3例如包括车速传感器、加速度传感器以及偏航率(yaw rate)传感器。车速传感器是检测自身车辆2的速度的检测器。作为车速传感器,例如使用轮速传感器。加速度传感器是检测自身车辆2的加速度的检测器。加速度传感器也可以包括检测自身车辆2的前后方向的加速度的前后加速度传感器、和检测自身车辆2的横向的加速度的横向加速度传感器。偏航率传感器是检测围绕自身车辆2的重心的垂直轴的偏航率(旋转角速度)的检测器。作为偏航率传感器,例如能够使用陀螺仪传感器。
GPS接收部4从三个以上的GPS卫星接收信号,取得表示自身车辆2的位置的位置信息。位置信息中例如包含经度和纬度。也可以取代GPS接收部4而使用能够确定自身车辆2所在的经度和纬度的其他手段(单元)。
外界传感器5是检测自身车辆2的周边环境的检测设备。外界传感器5检测自身车辆2所行驶的道路上的前方的目标物。外界传感器5包括相机(camera,摄像头)和雷达传感器中的至少一方。相机是拍摄自身车辆2的周边环境的拍摄设备。作为一例,相机设置在自身车辆2的前风挡的背面侧。相机取得与自身车辆2的周边环境有关的拍摄信息。相机既可以是单目相机,也可以是立体相机。立体相机具有配置为再现双眼视差的两个拍摄部。立体相机的拍摄信息中也包含进深方向的信息。雷达传感器是利用无线电波(例如毫米波)或者光来检测自身车辆2周边的物体的检测设备。雷达传感器例如包括毫米波雷达或者激光雷达(LIDAR:Laser Imaging Detection and Ranging)。雷达传感器通过向自身车辆2周边发送无线电波或者光并接收由物体反射的无线电波或者光,从而检测物体。
地图数据库6是存储地图信息的存储装置。地图数据库6例如保存在搭载于自身车辆2的HDD(Hard Disk Drive,硬盘驱动器)内。地图数据库6具有包含静止物体的信息、交通规则、信号机(交通信号灯)的位置和道路宽度的道路信息等作为地图信息。地图数据库6所包含的地图信息的一部分也可以存储于与存储有地图数据库6的HDD不同的存储装置。地图数据库6所包含的地图信息的一部分或者全部也可以存储于自身车辆2所具有的存储装置以外的存储装置。
导航系统7是引导自身车辆2的驾驶员直到预先设定的目的地的系统。导航系统7基于由GPS接收部4测定到的自身车辆2的位置和地图数据库6的地图信息,识别自身车辆2所行驶的道路及行驶车道。导航系统7计算从自身车辆2的位置到目的地的目标路线,使用HMI(Human Machine Interface,人机界面)对驾驶员进行该目标路线的引导。
致动器9是执行自身车辆2的转向控制及减速控制的装置。致动器9至少包括发动机致动器、制动致动器以及转向致动器。发动机致动器通过根据被输入的控制信号来变更对于发动机的空气的供给量(例如变更节气门开度),从而控制自身车辆2的驱动力。此外,在自身车辆2为混合动力车或者电动汽车的情况下,发动机致动器控制作为动力源的马达的驱动力。
ECU10是具有CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、CAN(Controller Area Network,控制器局域网)通信电路等的电子控制单元。ECU10例如使用CAN通信电路与进行通信的网络连接,与上述的自身车辆2的构成要素以能够通信的方式连接。ECU10例如基于CPU输出的信号,使CAN通信电路工作而输入输出数据,将数据存储于RAM,将存储于ROM的程序加载到RAM,并执行加载到RAM的程序,由此实现各种功能。ECU10也可以由多个电子控制单元构成。ECU10构成驾驶辅助装置1。
ECU10计算目标横向距离Y
ECU10具备阈值运算部(第1处理部)11、风险势场运算部(第2处理部)12、谷搜索部(第3处理部)13、目标减速度运算部(第4处理部)14以及行驶控制部15,作为功能上的构成。
阈值运算部11根据一个或多个目标物的类别,按一个或多个目标物的每一个取得阈值α。具体而言,阈值运算部11基于通过外界传感器5检测出的目标物的位置,检测与自身车辆2的距离在第一预定距离以下的一个或多个目标物。第一预定距离为自身车辆2的车速×回避判定TTC。回避判定TTC是用于回避判定的碰撞余裕时间(Time To Collision,避撞时间),被预先确定并存储。碰撞余裕时间是表示自身车辆2会在几秒内与有关目标物碰撞的指标。阈值运算部11将与自身车辆2的距离在第一预定距离以下的一个或多个目标物设为“准有效状态”,例如从根据有关目标物的类别所预先设定的映射求取有关目标物的阈值α。
风险势场运算部12基于内界传感器3、GPS接收部4、外界传感器5、地图数据库6、导航系统7以及阈值运算部11的输出,计算风险势场。也即是说,风险势场运算部12基于自身车辆2的车速、自身车辆2的位置、自身车辆2所行驶的道路的道路宽度以及一个或多个目标物的位置,计算风险势场。
具体而言,风险势场运算部12基于从预先设定的映射中选择出的道路势场的方差(决定势梯度的常数)σ
Ur(x,y)=(1-exp(-(y-y
y
风险势场运算部12决定从自身车辆2的车速求取的x方向和y方向的势的方差σ
Uo(x,y)=exp(-(x-x
风险势场运算部12根据检测出的所有目标物的单一势场Uo的总和以及道路势场Ur,按照下式(3),计算风险势场作为整体势场。
风险势场=所有目标物的单一势场Uo的总和+道路势场Ur……(3)
谷搜索部13基于内界传感器3、GPS接收部4以及风险势场运算部12的输出,计算与一个或多个目标物有关的目标横向距离Y
具体而言,在检测出与自身车辆2的距离在比第一预定距离小的第二预定距离以下的一个或多个目标物的情况下,谷搜索部13将有关目标物设为“有效状态”,根据整体势场,利用谷(山谷)搜索来计算回避路径(最低谷位置的路径)。第二预定距离为自身车辆2的车速×控制触发TTC。控制触发TTC是用于开始进行控制的碰撞余裕时间,被预先确定并存储。控制触发TTC比回避判定TTC小。所谓谷搜索,是求取最低谷位置,该最低谷位置是自身车辆2从其位置前进了任意距离(某一秒数×自身车辆2的车速)的位置,是整体势场的谷成为最低的位置。关于谷搜索,能够采用各种公知技术。谷搜索部13基于计算出的回避路径,按照下式(4),计算目标操舵量θ
目标操舵量θ
在检测出与自身车辆2的距离在第二预定距离以下的一个或多个目标物的情况下,谷搜索部13根据整体势场,利用谷搜索来计算目标横向距离Y
横向距离抑制量ΔY
目标减速度运算部14计算目标减速度A
此外,目标减速度运算部14也可以基于乘员的敏感度,变更目标减速度A
行驶控制部15基于通过谷搜索部13计算出的目标操舵量θ
在自身车辆2是通过自动驾驶行驶的车辆的情况下,行驶控制部15生成满足目标操舵量θ
ECU10在检测出与自身车辆2的距离在第一预定距离以下的一个或多个目标物的情况下,周期性地重复执行阈值运算部11及风险势场运算部12的处理。另外,ECU10在检测出与自身车辆2的距离在比第一预定距离小的第二预定距离以下的一个或多个目标物的情况下,周期性地重复执行谷搜索部13及目标减速度运算部14的处理。稍后说明详情。
接着,参照图3及图4的流程图,对驾驶辅助装置1中的ECU10的处理的例子进行说明。ECU10例如在辅助执行按钮等通过乘员的操作而被打开(ON)时开始进行处理。
如图3所示,在ECU10中,由阈值运算部11判定是否检测到与自身车辆2的距离在第一预定距离以下的第k目标物T
另外,如图4所示,在ECU10中,由谷搜索部13判定是否检测到与自身车辆2的距离在第二预定距离以下的第k目标物T
由目标减速度运算部14计算相对于第k目标物T
由行驶控制部15向致动器9输入与目标操舵量θ
图5A是表示通过驾驶辅助装置1回避多个目标物(第n目标物T
在图示的例子中,自身车辆2在沿着道路直行的行驶预定路径LP上行驶。在驾驶辅助装置1中,如图5A所示,在第n目标物与自身车辆2的距离变为第一预定距离以下的情况下,第n目标物被设为准有效状态(例如标志(flag)为“准有效”),将第n目标物的单一势场Uo与风险势场相加。计算出第n目标物的阈值α、即阈值α1。此时,转向控制及减速控制尚未被执行,行驶预定路径LP仍然以直线状延伸。
接下来,自身车辆2继续行驶,如图5B所示,在第n+1目标物与自身车辆2的距离变为第一预定距离以下的情况下,第n+1目标物被设为准有效状态,进一步将第n+1目标物的单一势场Uo与风险势场相加。计算出第n+1目标物的阈值α、即阈值α2。此时,第n目标物与自身车辆2的距离比第二预定距离大。转向控制及减速控制尚未被执行,行驶预定路径LP仍然以直线状延伸。
接下来,自身车辆2继续行驶,如图6A所示,在第n目标物与自身车辆2的距离变为第二预定距离以下的情况下,第n目标物被设为有效状态(例如标志为“有效”),利用谷搜索模型,计算目标操舵量θ
接下来,自身车辆2继续行驶,如图6B所示,在第n+1目标物与自身车辆2的距离变为第二预定距离以下的情况下,第n+1目标物被设为有效状态,利用谷搜索模式,计算目标操舵量θ
以上,在驾驶辅助装置1中,在转向控制的目标横向距离Y
在驾驶辅助装置1中,具备按每个目标物取得阈值α的阈值运算部11、计算风险势场的风险势场运算部12、计算目标横向距离Y
在驾驶辅助装置1中,在检测出与自身车辆2的距离在第一预定距离以下的第k目标物T
另外,谷搜索部13及目标减速度运算部14的处理并非在检测出与自身车辆2的距离在第一预定距离以下的第k目标物T
根据驾驶辅助装置1,能够在进行转向控制及减速控制方面,根据横向的回避量唯一地决定目标减速度。能够消除相对于横向回避量的减速度的过量与不足。在横向距离抑制量ΔY
[第2实施方式]
接着,对第2实施方式进行说明。在第2实施方式中,对与上述第1实施方式的不同之处进行说明,并省略重复的说明。
图7是包括第2实施方式涉及的驾驶辅助装置101的自身车辆2的功能框图。如图7所示,本实施方式的驾驶辅助装置101与上述驾驶辅助装置1的不同之处在于,取代ECU10(图1)而具备ECU110。
ECU110具备目标横向距离运算部111、目标减速度运算部112以及行驶控制部113。目标横向距离运算部111基于内界传感器3、GPS接收部4、外界传感器5、地图数据库6以及导航系统7的输出,例如计算根据自身车辆2的车速而改变(可变)的目标横向距离YH(k)。
目标减速度运算部112在通过目标横向距离运算部111计算出的目标横向距离YH(k)小于阈值α的情况下,由阈值α减去该目标横向距离YH(k)所得到的差量ΔYH(k)越大,则将目标减速度AH(k)设得越大。行驶控制部113基于通过目标横向距离运算部111计算出的目标横向距离YH(k)以及通过目标减速度运算部112计算出的目标减速度AH(k),使致动器9执行转向控制及减速控制以避开在自身车辆2的前方检测出的目标物。
在这种驾驶辅助装置101中,也取得与上述第1实施方式同样的效果、即抑制自身车辆2的乘员的不适感等的效果。
[变形例]
以上,对各种例示性的实施方式进行了说明,但并非限定于上述的例示性的实施方式,也可以进行各种各样的省略、替换以及变更。
在上述实施方式中,虽然在执行了基于各种距离以下风险势场来执行谷搜索而计算回避路径并计算目标操舵量θ
- ECO驾驶辅助装置、ECO驾驶辅助信息生成装置、ECO驾驶辅助信息计算装置、ECO驾驶状态显示装置、ECO驾驶辅助系统和ECO驾驶辅助信息计算方法
- 驾驶辅助方法以及利用该驾驶辅助方法的驾驶辅助装置、驾驶辅助系统、自动驾驶控制装置、车辆、程序