腔镜吻合器及其传动机构
文献发布时间:2023-06-19 10:58:46
技术领域
本文涉及但不限于外科缝合器械技术领域,特别涉及但不限于一种腔镜吻合器及其传动机构。
背景技术
吻合器是手术中使用的替代手工缝合的设备,工作原理是利用钛钉或不锈钢钉对组织进行离断或吻合,类似于订书机。相对于传统的手工缝合,器械缝合有以下优势:缝合快速,操作简便,节省手术时间;一次性使用,避免交叉感染;利用钛钉或不锈钢钉,缝合严密、松紧合适;副作用和手术并发症少等,还使得过去无法切除的肿瘤手术得以病兆切除,很受外科医生的青睐。
吻合器的适用范围已涉及到胃肠外科、肝胆外科、胸外科、泌尿外科、妇产科等各个领域,成为医生必不可少的工具之一。用器械代替手工缝合,对于患者具有术中较少出血、较少手术时间、减少由于手工而造成的误差、避免感染、术后功能恢复快等多种优势。
目前腔镜专用缝合器,即常见的一次使用直线切割腔镜吻合器。这种缝合器共有六排缝钉,钉匣(或钉仓)中有全新刀片,在缝合钉闭合的同时刀片从中间切断组织,使两边各三排缝钉完成缝合、止血等功能。腹腔镜手术是一门新发展起来的微创方法,是未来手术方法发展的一个必然趋势。目前我国的微创手术比例较低,仍有较大发展空间。
发明内容
以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
本申请实施例提供了一种腔镜吻合器及其传动机构,通过对传动机构的结构改进,使得产品的结构简化,成本降低,且使用操作更加简便。
一种腔镜吻合器的传动机构,包括用于驱动腔镜吻合器的钉仓组件开闭的开闭传动机构和驱动所述钉仓组件击发、回退的击发传动机构,所述传动机构还包括可运动的传动部件,所述传动部件包括第一传动部和第二传动部,所述第一传动部设置成可与所述开闭传动机构传动配合或分离,所述第二传动部设置成可与所述击发传动机构传动配合或分离。
一种腔镜吻合器,包括上述的腔镜吻合器的传动机构、驱动机构和钉仓组件,所述传动机构的传动部件与所述驱动机构连接,所述驱动机构为手动驱动机构或电动驱动机构,所述传动机构的开闭传动机构和所述击发传动机构均与所述钉仓组件连接。
本申请实施例提供的腔镜吻合器的传动机构,传动部件的第一传动部可与开闭传动机构传动配合或分离,以便在需要打开或闭合腔镜吻合器的钉仓组件时,传动部件的第一传动部与开闭传动机构传动配合,并带动开闭传动机构动作,进而使钉仓组件打开或闭合;当无需改变钉仓组件的开闭状态时,传动部件的第一传动部与开闭传动机构分离,此时钉仓组件保持原有的开闭状态。
传动部件的第二传动部可与击发传动机构传动配合或分离,以便在钉仓组件需要击发或回退时,传动部件的第二传动部与击发传动机构传动配合,并带动击发传动机构动作,进而使钉仓组件击发或回退;当钉仓组件完成击发、回退后,传动部件的第二传动部与击发传动机构分离,此时钉仓组件回复至原始状态,以便进行下一次击发。
本申请实施例提供的腔镜吻合器的传动机构,通过一个传动部件的第一传动部和第二传动部分别带动开闭传动机构和击发传动机构动作,这样仅需一个驱动机构驱动传动部件运动,即可控制钉仓组件的开闭和击发、回退。与通过两个驱动部件分别控制钉仓组件的开闭和击发、回退相比,本申请实施例的腔镜吻合器的传动机构,通过一个驱动机构控制钉仓组件的开闭和击发、回退,使产品的结构简化,成本降低,且在使用过程中操作更加简便。
本申请实施例的其它特征和优点将在随后的说明书中阐述。
附图说明
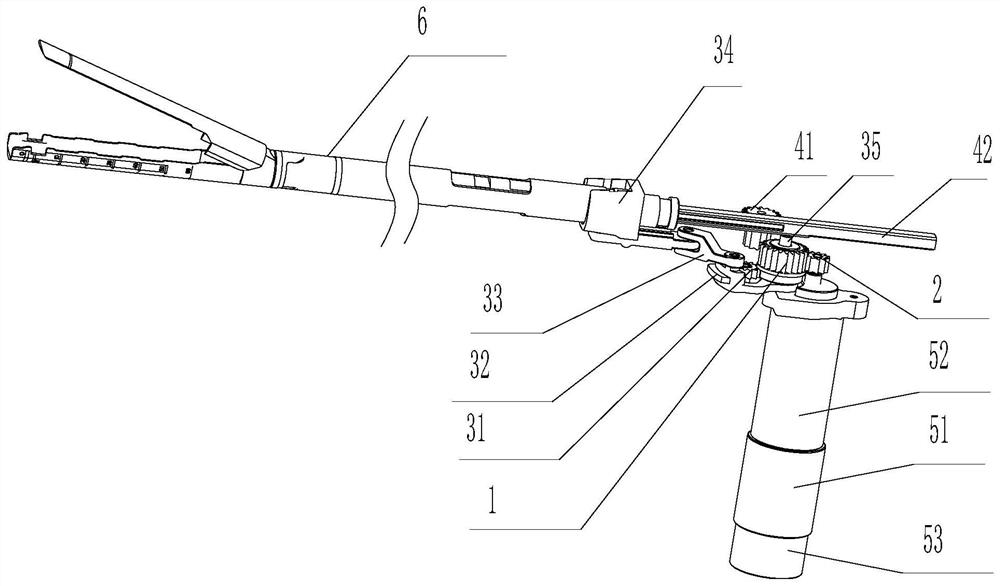
图1为根据本申请一实施例的腔镜吻合器的结构示意图;
图2为图1所示的腔镜吻合器中,驱动机构与传动机构的装配结构示意图;
图3为图1所示的腔镜吻合器中,驱动机构与传动机构的分解示意图;
图4为图1所示的腔镜吻合器中,传动机构的局部结构示意图;
图5为图1所示的腔镜吻合器的钉仓组件处于打开状态时,传动机构的结构示意图;
图6为图1所示的腔镜吻合器的钉仓组件处于打开关闭时,传动机构的结构示意图;
图7为图1所示的腔镜吻合器的钉仓组件处于打开关闭时,传动机构的传动部件与从动齿轮的配合结构示意图;
图8为图1所示的腔镜吻合器中,传动机构的传动部件的结构示意图;
图9为图1所示的腔镜吻合器中,传动部件的第三传动部的结构示意图;
图10为图1所示的腔镜吻合器中,传动部件的第一传动部的结构示意图;
图11为图1所示的腔镜吻合器中,传动部件的第二传动部的结构示意图;
图12为图1所示的腔镜吻合器中,传动部件的摆动件的结构示意图;
图13为图1所示的腔镜吻合器的钉仓组件进行击发、回退时的结构示意图;
图14为图1所示的腔镜吻合器中,传动机构的传动部件与传动齿轮的一种配合结构示意图;
图15为图1所示的腔镜吻合器中,传动机构的传动部件与传动齿轮的另一种配合结构示意图;
图16为图1所示的腔镜吻合器的钉仓组件进行手动回退的结构示意图;
图17为图1所示的腔镜吻合器的操作流程示意图;
图18为根据本申请另一实施例的腔镜吻合器的驱动机构与传动机构的装配结构示意图;
图19为图18所示的腔镜吻合器的驱动机构与传动机构的分解结构示意图;
图20为一些情况中的腔镜吻合器的结构示意图,其中钉仓组件处于打开状态;
图21为图20所示的腔镜吻合器的钉仓组件处于闭合状态的结构示意图;
图22为图20所示的腔镜吻合器的分解结构示意图。
附图标记:
1-传动部件,11-第一传动部,12-第二传动部,121-半齿,13-第三传动部,14-非传动部,15-第四轴孔,
2-输入齿轮,
3-开闭传动机构,31-从动齿轮,311-齿轮部,312-锁止部,313-锁止面,32-摆动件,321-摆动轴孔,322-驱动齿轮,323-第一转轴,33-连杆,331-第一轴孔,332-第二轴孔,34-连接滑块,341-第三轴孔,35-齿轮轴,
4-击发传动机构,41-传动齿轮,411-第一圈轮齿,412-第二圈轮齿,42-传动齿条,
5-驱动机构,51-驱动电机,52-减速器,53-编码器,54-驱动轴,55-驱动扳手,56-开闭手柄,
6-钉仓组件。
具体实施方式
下文中将结合附图对本申请的实施例进行详细说明。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互任意组合。
腔镜专用缝合器主要有两种类型:一种是手动腔镜吻合器,另一种是电动腔镜吻合器。
手动腔镜吻合器主要是靠齿条与击发推进片实现切割刀的前进,而后退需要手动拉回。钉仓组件的打开与闭合,靠切割刀上的刀销,推动抵钉座上的斜面来实现抵钉座的打开与闭合。手动腔镜吻合器从整个结构上来看相对简单,但操作复杂,器械在工作时的稳定性不好,击发力大小变化明显,器械传动时的快与慢受手动影响比较大,特别是每个人的握力大小差异较大,结果是切割刀切割组织时的速度时快时慢,很容易造成被切割的组织面不齐,推钉片的速度也同样存在时快时慢,很容易造成钉型不良等问题,很容易影响手术的最终效果。
电动腔镜吻合器由蓄电池、电路控制系统、带减速器的微型驱动电机、传动系统和保险系统等组成。通过机电的结合,操作变得简单,能很好的控制器械工作时的稳定性,使用得到广泛的推广。目前市场上比较常见的大部分为进口电动腔镜吻合器,销售价格普遍偏高。
为了解决上述问题,本申请实施例提供了一款结构简单、价格低廉、操作简便的腔镜吻合器的传动机构。
如图1-图4所示,本申请实施例提供的腔镜吻合器的传动机构,包括用于驱动腔镜吻合器的钉仓组件6开闭的开闭传动机构3和驱动钉仓组件6击发、回退的击发传动机构4,传动机构还包括可运动的传动部件1,传动部件1包括第一传动部11和第二传动部12,第一传动部11设置成可与开闭传动机构3传动配合或分离,第二传动部12设置成可与击发传动机构4传动配合或分离。
该腔镜吻合器的传动机构中,传动部件1的第一传动部11可与开闭传动机构3传动配合或分离,以便在需要打开或闭合腔镜吻合器的钉仓组件6时,传动部件1的第一传动部11与开闭传动机构3传动配合,并带动开闭传动机构3动作,进而使钉仓组件6打开或闭合;当无需改变钉仓组件6的开闭状态时,传动部件1的第一传动部11与开闭传动机构3分离,此时钉仓组件6保持原有的开闭状态。
传动部件1的第二传动部12可与击发传动机构4传动配合或分离,以便在钉仓组件6需要击发、回退时,传动部件1的第二传动部12与击发传动机构4传动配合,并带动击发传动机构4动作,进而使钉仓组件6击发、回退;当钉仓组件6完成击发、回退后,传动部件1的第二传动部12与击发传动机构4分离,此时钉仓组件6回复至初始位置。
本申请实施例提供的腔镜吻合器的传动机构,通过一个传动部件1的第一传动部11和第二传动部12分别带动开闭传动机构3和击发传动机构4动作,这样仅需一个驱动机构5驱动传动部件1运动,即可控制钉仓组件6的开闭和击发、回退。
图20-图22所示的一种腔镜吻合器的传动机构中,通过开闭手柄56控制钉仓组件6的开闭,通过驱动电机51控制钉仓组件6的击发、回退。手动扳动开闭手柄56,使开闭手柄56逆时针(或顺时针)转动,由于开闭手柄56与连杆33之间为销连接,连杆33做平面运动,连杆33与连接滑块34之间为销连接,使得连接滑块34向前运动,使钉仓组件6闭合。使开闭手柄56顺时针(或逆时针)转动,钉仓组件6打开。驱动电机51逆时针(或顺时针)转动,带动输入齿轮2逆时针(或顺时针)转动,输入齿轮2与传动齿轮41啮合,带动传动齿轮41顺时针(或逆时针),使齿条向前运动,使钉仓组件6击发。击发完成后,驱动电机51顺时针(或逆时针)转动,使钉仓组件6回退。
与图20-图22所示的腔镜吻合器的传动机构相比,本申请实施例的腔镜吻合器的传动机构,通过一个驱动机构5控制钉仓组件6的开闭和击发、回退,使产品的结构简化,成本降低,且在使用过程中操作更加简便。
由于钉仓组件6的开闭和击发、回退不是同时进行的,因此在第一传动部11与开闭传动机构3传动配合时,第二传动部12与击发传动机构4分离;在第二传动部12与击发传动机构4传动配合时,第一传动部11与开闭传动机构3分离。
一些示例性实施例中,如图8、图10和图11所示,传动部件1为可转动的传动部件,第一传动部11设置在传动部件1的第一轴向位置,且沿传动部件1的周向延伸成非环形状;第二传动部12设置在传动部件1的第二轴向位置,且沿传动部件1的周向延伸成非环形状。
传动部件1为可转动的传动部件,且第一传动部11和第二传动部12设置在不同的传动部件1的不同的轴向位置,以防止第一传动部11与击发传动机构4发生干涉,第二传动部12与开闭传动机构3发生干涉。第一传动部11和第二传动部12均沿传动部件1的周向延伸成非环形状,以便在传动部件1的转动过程中,实现第一传动部11与开闭传动机构3的传动配合与分离,第二传动部12与击发传动机构4的传动配合与分离。其中,在传动部件1转动一圈的过程中,可实现钉仓组件6由打开到闭合,以及钉仓组件6的击发。在传动部件1反向转动一圈的过程中,可实现击发后的钉仓组件6的回退,以及钉仓组件6由闭合到打开。
应当理解,传动部件1也可以为可平移的传动部件,第一传动部11和第二传动部12可为设置在可平移的传动部件1上的凸出部。当传动部件1平移时,第一传动部11和第二传动部12可分别挤压开闭传动机构3和击发传动机构4,使开闭传动机构3和击发传动机构4在不同的时间运动,进而实现对钉仓组件6的开闭和击发、回退的控制。
一些示例性实施例中,如图8、图10和图11所示,传动部件1为异型齿轮,第一传动部11与第二传动部12为齿轮传动部。
如图8、图10和图11所示,该传动部件1为异型齿轮,其第一轴向位置(图8中的下部)和第二轴向位置(图8中的上部)上分别设有两个齿轮传动部,形成第一传动部11和第二传动部12。两个齿轮传动部为不完全齿,即齿轮传动部并未沿传动部件1的周向延伸一整圈,而是仅沿着传动部件1的周向延伸一段距离,形成非环形状。在第一传动部11的轮齿与开闭传动机构3传动配合时,第二传动部12的轮齿与击发传动机构4分离;在第二传动部12的轮齿与击发传动机构4传动配合时,第一传动部11的轮齿与开闭传动机构3分离。
应当理解,传动部件1不仅可以为异型齿轮,还可以为其他形式,如可为凸轮形式,该传动部件1包括两个凸轮轮廓,两个凸轮轮廓分别形成第一传动部11和第二传动部12,通过一凸轮轮廓与开闭传动机构3配合实现间歇式传动,通过另一凸轮轮廓与击发传动机构4配合实现间歇式传动。
一些示例性实施例中,如图1-图4所示,传动机构还包括输入齿轮2,输入齿轮2设置成安装在驱动机构5的驱动轴54上,输入齿轮2具有一圈轮齿;如图8和图9所示,异型齿轮还包括与输入齿轮2啮合传动的第三传动部13,第三传动部13包括沿异型齿轮的周向延伸的一圈轮齿。
输入齿轮2与驱动机构5的驱动轴54连接,使得驱动轴54可带动输入齿轮2转动。输入齿轮2具有一整圈轮齿,异型齿轮的第三传动部13也包括沿异型齿轮的周向延伸的一整圈轮齿,这样通过输入齿轮2的轮齿与第三传动部13的轮齿啮合,使得输入齿轮2可始终带动异型齿轮转动,以便转动的异型齿轮带动开闭传动机构3运动,或者带动击发传动机构4运动。
一些示例性实施例中,如图3和图8所示,包括第一传动部11、第二传动部12和第三传动部13的异型齿轮为一体式结构;或者,第一传动部11、第二传动部12和第三传动部13为三个相互独立的部件,使得异型齿轮为装配式固定结构。当然,也可以将第一传动部11、第二传动部12和第三传动部13中的任意两个传动部设置成一体式结构,再与第三个传动部装配固定形成异型齿轮。
一些示例性实施例中,如图1-图3、图5-图6所示,开闭传动机构3包括从动齿轮31、摆动件32、连杆33和连接滑块34,从动齿轮31与第一传动部11啮合传动或分离,摆动件32的摆动中心与异型齿轮的转动轴线重合,摆动件32的摆动端设有与从动齿轮31啮合的驱动齿轮322,摆动件32与连杆33通过第一转轴323转动连接,连杆33与第二转轴通过销钉转动连接,连接滑块34设置成与钉仓组件6连接。
如图3和图12所示,摆动件32的一端为摆动中心,摆动中心设有摆动轴孔321,齿轮轴35穿过摆动件32的摆动轴孔321和异型齿轮(传动部件1)的第四轴孔15,使得异型齿轮、摆动件32的摆动轴孔321、齿轮轴35为同轴心。
摆动件32的另一端为摆动端,该摆动端设有驱动齿轮322,从动齿轮31设置在异型齿轮与驱动齿轮322之间,并且可与异型齿轮与驱动齿轮322二者啮合配合。
摆动件32的摆动端还与连杆33通过第一转轴323进行转动连接。其中,第一转轴323可一体地成型在摆动件32的摆动端,连杆33的一端设有第一轴孔331,第一转轴323可转动地穿设在第一轴孔331内。
连杆33的另一端设有安装槽,连接滑块34的一端插入安装槽内,安装槽的槽壁上设有第二轴孔332,连接滑块34插入安装槽内的部分上设有第三轴孔341,第二转轴(如销钉)可转动地穿设在第二轴孔332和第三轴孔341内。
该传动机构中,如图5和图6所示,输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮的第一传动部11可与从动齿轮31啮合,从动齿轮31与摆动件32的驱动齿轮322啮合,摆动件32与连杆33的一端通过第一转轴323转动连接,连杆33的另一端与连接滑块34通过第二转轴转动连接。
如图5所示,当驱动机构5的驱动轴54顺时针(或逆时针)转动时,带动输入齿轮2也顺时针(或逆时针)转动。由于输入齿轮2与异型齿轮的第三传动部13(第三传动部13为一整圈的完整齿轮)啮合,因此异型齿轮逆时针(或顺时针)转动;由于异型齿轮的第一传动部11与从动齿轮31啮合,带动从动齿轮31顺时针(或逆时针)传动;从动齿轮31又与摆动件32的驱动齿轮322啮合,带动摆动件32顺时针(或逆时针)摆动;此时连杆33带动连接滑块34向前运动,使钉仓组件6由打开状态运动到闭合状态,传动机构由图5所示的状态运动到图6所示的状态。
如图6所示,当驱动机构5的驱动轴54反方向逆时针(或顺时针)转动,带动输入齿轮2也逆时针(或顺时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮顺时针(或逆时针)转动;由于异型齿轮的第一传动部11与从动齿轮31啮合,带动从动齿轮31逆时针(或顺时针)传动;从动齿轮31又与摆动件32的驱动齿轮322啮合,带动摆动件32逆时针(或顺时针)转动;此时连杆33带动连接滑块34向后运动,使钉仓组件6由闭合状态运动到打开状态,传动机构由图6所示的状态运动到图5所示的状态。
一些示例性实施例中,如图7所示,第一传动部11的两端之间为非传动部14,非传动部14具有弧形面。从动齿轮31包括沿周向分布的齿轮部311和锁止部312,齿轮部311设置成与第一传动部11啮合传动或分离,锁止部312具有弧形的锁止面313,且在齿轮部311与第一传动部11分离时,锁止面313设置成与非传动部14配合,以将从动齿轮31锁止。
打开或闭合钉仓组件6时,第一传动部11的轮齿与从动齿轮31的齿轮部311啮合传动。
当异型齿轮逆时针(或顺时针)转动,并通过开闭传动机构3使钉仓组件6处于闭合状态时,开闭传动机构3处于图6所示的状态,此时从动齿轮31的锁止面313与异型齿轮的非传动部14的弧形面形成图7所示的自锁机构,即便异型齿轮继续逆时针(或顺时针)转动,从动齿轮31也是停止转动,使得钉仓组件6保持在闭合状态,开闭传动机构3始终保持在图6所示的状态。钉仓组件6保持在闭合状态,才能进行钉仓组件6的击发,因此,从动齿轮31的锁止面313与异型齿轮的非传动部14的弧形面形成自锁机构,提高了腔镜吻合器的安全性能和使用性能。
一些示例性实施例中,如图7所示,从动齿轮31的锁止面313为向内侧凹的弧形面,异型齿轮的非传动部14的弧形面为向外侧凸出的弧形面,并与锁止面313适配。
一些示例性实施例中,如图1-图4所示,击发传动机构4包括相啮合的传动齿轮41和传动齿条42,传动齿轮41设置成与第二传动部12啮合传动或分离,传动齿条42设置成与钉仓组件6连接。
由于异型齿轮的第一传动部11和第二传动部12均为不完全齿,因此,在钉仓组件6打开或闭合的过程中,第一传动部11的轮齿与开闭传动机构3的从动齿轮31的齿轮部311传动配合,第二传动部12的轮齿与击发传动机构4的传动齿轮41分离,此时击发传动机构4处于停止状态;在钉仓组件6击发或回退的过程中,第二传动部12的轮齿与传动齿轮41传动配合,同时异型齿轮的非传动部14的弧形面与从动齿轮31的锁止面313配合,使开闭传动机构3处于停止状态,并将钉仓组件6锁止在闭合状态。
一些示例性实施例中,如图3和图4所示,传动齿轮41为台阶齿轮,台阶齿轮包括第一圈轮齿411和第二圈轮齿412,第一圈轮齿411设置成与第二传动部12啮合传动或分离,第二圈轮齿412与传动齿条42啮合。
台阶齿轮上,第一圈轮齿411的分度圆的直径可小于第二圈轮齿412的分度圆的直径,以便增大传动比和传动齿条42的移动距离,进而增大钉仓组件6击发时的前进距离。
如图4所示,该传动机构中,输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮的第二传动部12可与传动齿轮41啮合,传动齿轮41与传动齿条42啮合。
如图4和图13所示,在钉仓组件6处于闭合状态时,驱动机构5的驱动轴54顺时针(或逆时针)转动,带动输入齿轮2也顺时针(或逆时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮逆时针(或顺时针)转动。由于异型齿轮的第二传动部12与台阶齿轮(即传动齿轮41)的小齿轮(即第一圈轮齿411)啮合,带动台阶齿轮顺时针(或逆时针)传动;台阶齿轮的大齿轮(即第二圈轮齿412)又与传动齿条42啮合,带动齿条向前传动,进而带动钉仓组件6向前击发。当传动齿条42前进预设距离(如30mm、45mm或60mm)时,传动齿条42停止前进,此时钉仓组件6的击发完成。
钉仓组件6击发完成后,驱动机构5的驱动轴54反方向逆时针(或顺时针)转动,带动输入齿轮2也逆时针(或顺时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮顺时针(或逆时针)转动。由于异型齿轮的第二传动部12与台阶齿轮的小齿轮啮合,带动台阶齿轮逆时针(或顺时针)传动;台阶齿轮的大齿轮又与传动齿条42啮合,带动传动齿条42向后传动,并带动钉仓组件6回退。当传动齿条42回退到初始位置时,传动齿条42停止后退,此时钉仓组件6回退到位。
一些示例性实施例中,如图14所示,第二传动部12两端的轮齿削顶形成半齿121。
由于第二传动部12为设置在异型齿轮的周向上的不完全齿,当钉仓组件6击发或回退时,若如图15所示,第二传动部12端部的轮齿为全齿,则第二传动部12端部的轮齿与传动齿轮41将要进入啮合时存在干涉。因此,如图14所示,将第二传动部12两端的轮齿削顶,修成半齿121,避免干涉。
如图1所示,本申请实施例还提供了一种腔镜吻合器,包括上述的腔镜吻合器的传动机构、驱动机构5和钉仓组件6,传动机构的开闭传动机构3和击发传动机构4均与钉仓组件6连接,传动机构的传动部件1与驱动机构5连接。其中,传动部件1可与输入齿轮2啮合传动,输入齿轮2可安装在驱动机构的驱动轴54上。
一些示例性实施例中,如图1-图3所示,腔镜吻合器为电动腔镜吻合器,驱动机构5为电动驱动机构,包括:驱动电机51、减速器52和驱动轴54,驱动电机51可为微型驱动电机51,驱动电机51与减速器52连接,减速器52与驱动轴54连接,传动机构的传动部件1或输入齿轮2安装在驱动轴54上。
一些示例性实施例中,如图1-图3所示,驱动机构5还可包括用于控制驱动电机51的启停的控制元件,控制元件可以是编码器53,编码器53可用于控制驱动电机51的角位移。
当然,控制元件也可以是其他元件,如可以是感应开关,传动机构触发感应开关时,控制驱动电机51停止转动。感应开关可以是微动开关、红外感应开关、电磁感应开关等。
感应开关可与开闭传动机构3的连接滑块34配合进行触发,或者与开闭传动机构3的其他部件配合进行触发。
感应开关可与击发传动机构4的传动齿条42配合进行触发,或者与击发传动机构4的其他部件配合进行触发。
电动腔镜吻合器实现了机电的结合,使得产品的操作变得简单,能很好的控制产品工作时的稳定性。
一些示例性实施例中,如图16所示,腔镜吻合器为手动腔镜吻合器,驱动机构5为手动驱动机构,包括驱动扳手55,驱动扳手55上设有驱动轴54,传动机构的输入齿轮2安装在驱动轴54上。
下面结合附图,说明钉仓组件6打开和闭合、击发和回退的过程。
腔镜吻合器的操作流程如图17所示。首先将钉仓组件6闭合,钉仓组件6闭合到位后进行钉仓组件6的击发;钉仓组件6击发到位后停止,然后钉仓组件6进行回退;钉仓组件6回退到位后停止,然后将钉仓组件6打开。
钉仓组件6的闭合:
如图5所示,当触发控制钉仓组件6的闭合按键,驱动电机51接通电源,驱动电机51顺时针(或逆时针)转动,带动输入齿轮2也顺时针(或逆时针)转动。由于输入齿轮2与异型齿轮的第三传动部13(第三传动部13为一整圈的完整齿轮)啮合,因此异型齿轮逆时针(或顺时针)转动;由于异型齿轮的第一传动部11与从动齿轮31啮合,带动从动齿轮31顺时针(或逆时针)传动;从动齿轮31又与摆动件32的驱动齿轮322啮合,带动摆动件32顺时针(或逆时针)摆动;此时连杆33带动连接滑块34向前运动,使钉仓组件6由打开状态运动到闭合状态,传动机构由图5所示的状态运动到图6所示的状态。钉仓组件6完全闭合时,驱动电机51收到控制信号停止转动。
钉仓组件6闭合时,异型齿轮的第一传动部11与从动齿轮31转动到如图7所示的位置。由于异型齿轮上有齿的第一传动部11啮合完,无齿的非传动部14与从动齿轮31的锁止面313配合,形成自锁,使钉仓组件6保持在闭合状态。这时,如图6所示,连杆33的中心轴线与连接滑块34的运动方向平行(如图6中均处于水平方向上),连杆33不受径向力,连杆33所承受的推力最大,保证了自锁效果。进一步,连接滑块34的中心轴线、连杆33的中心轴线、第一转轴323的中心、摆动件32的摆动中心、从动齿轮31的转动中心、异型齿轮的转动中心、以及输入齿轮2的转动中心共线。
钉仓组件6的打开:
如图6所示,当触发控制钉仓组件6的打开按键,驱动电机51接通电源,驱动电机51反方向逆时针(或顺时针)转动,带动输入齿轮2也逆时针(或顺时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮顺时针(或逆时针)转动;由于异型齿轮的第一传动部11与从动齿轮31啮合,带动从动齿轮31逆时针(或顺时针)传动;从动齿轮31又与摆动件32的驱动齿轮322啮合,带动摆动件32逆时针(或顺时针)转动;此时连杆33带动连接滑块34向后运动,使钉仓组件6由闭合状态运动到打开状态,传动机构由图6所示的状态运动到图5所示的状态。钉仓组件6完全打开时,编码器53收到控制信号控制驱动电机51停止转动(也可以是连接滑块34触发感应开关后,控制驱动电机51停止转动)。
钉仓组件6的击发:
如图13所示,在钉仓组件6处于闭合状态时,触发控制钉仓组件6的击发按键,驱动电机51接通电源,驱动电机51顺时针(或逆时针)转动,带动输入齿轮2也顺时针(或逆时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮逆时针(或顺时针)转动。由于异型齿轮的第二传动部12与台阶齿轮(即传动齿轮41)的小齿轮(即第一圈轮齿411)啮合,带动台阶齿轮顺时针(或逆时针)传动;台阶齿轮的大齿轮(即第二圈轮齿412)又与传动齿条42啮合,带动齿条向前传动,直到传动齿条42前进预设距离(如30mm、45mm或60mm)时,传动齿条42停止前进。传动齿条42前进的距离由编码器53的设置控制,或者由编码器53和控制开关(可由击发传动机构4进行触发)共同控制驱动电机51的启停。
钉仓组件6的回退:
在钉仓组件6处于击发完成状态时,触发控制钉仓组件6的击发回退按键,驱动电机51接通电源,驱动电机51反方向逆时针(或顺时针)转动,带动输入齿轮2也逆时针(或顺时针)转动。由于输入齿轮2与异型齿轮的第三传动部13啮合,异型齿轮顺时针(或逆时针)转动。由于异型齿轮的第二传动部12与台阶齿轮的小齿轮啮合,带动台阶齿轮逆时针(或顺时针)传动;台阶齿轮的大齿轮又与传动齿条42啮合,带动传动齿条42向后传动,直到传动齿条42回退到初始位置时,传动齿条42停止后退。停止时的初始位置由编码器53的设置控制,或者由编码器53和控制开关共同控制驱动电机51的启停。
钉仓组件6的手动回退:
如图16所示,当电池亏电或者电路故障时,此时驱动电机51不能启动,这就需要将驱动电机51取下,使用驱动扳手55与输入齿轮2相连接,然后只需要使用者逆时针(或顺时针)旋转驱动扳手55,当传动齿条42回退到初始位时,继续逆时针(或顺时针)旋转驱动扳手55,使钉仓组件6由闭合状态运动到打开状态,然后停止旋转驱动扳手55。钉仓组件6的手动回退完成。
腔镜吻合器主要是由钉仓组件6和腔镜吻合器主体组成的一把完整的手术器械,腔镜吻合器主体包括驱动机构1、传动机构等。而一把完整的手术器械是由多个机构装配而成。本申请实施例的腔镜吻合器,能够实现钉仓组件6的电动打开和闭合、电动击发和回退、以及手动回退。钉仓组件6的电动打开和闭合是通过控制微动开关,使驱动电机51转动,驱动电机51带动各种啮合的齿轮转动,齿轮的转动通过连杆33和连接滑块34的传动,控制钉仓组件6的电动打开或电动闭合。钉仓组件6的电动击发和电动回退是通过控制微动开关使驱动电机51转动,驱动电机51带动各种齿轮传动,齿轮的转动再带动传动齿条42前进或后退,实现钉仓组件6的电动击发和电动回退。钉仓组件6的手动回退是在电路出现问题时,将驱动电机51拆下,利用驱动扳手55带动各种啮合的齿轮转动,并通过传动齿条42带动钉仓组件6回退。
综上所述,本申请实施例提供了一种安全性较高、使用性能稳定有效、高性价比的电动腔镜吻合器。
实施例二:
本实施例提供了一种腔镜吻合器及其传动机构,其与实施例一的主要区别在于,传动机构。
本实施例中,如图18和图19所示,传动机构不包括输入齿轮2,而是将异型齿轮(即传动部件1)安装在驱动机构5的驱动轴54上。
与实施例一对比,本实施例中省去了输入齿轮2,由异型齿轮直接与驱动机构5的驱动轴54相连。本实施例的钉仓组件6的打开及闭合、击发及回退的工作原理与实施例一类似。
本实施例中,异型齿轮直接安装在驱动机构5的驱动轴54上,由驱动轴54带动进行转动,因此,异型齿轮可不包括第三传动部13,而是仅包括第一传动部11和第二传动部12。其中,包括第一传动部11和第二传动部12的异型齿轮为一体式结构,或者,第一传动部11和第二传动部12为两个相互独立的部件,使得异型齿轮为装配式固定结构。
虽然本申请所揭露的实施方式如上,但所述的内容仅为便于理解本申请而采用的实施方式,并非用以限定本申请。任何本申请所属领域内的技术人员,在不脱离本申请所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本申请的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
- 用于腔镜吻合器的摆头机构及腔镜吻合器
- 腔镜吻合器及其传动机构