用于探测和识别物质内的外来成分的系统和方法
文献发布时间:2023-06-19 11:21:00
相关申请的交叉引用
本申请要求2018年10月18日提交美国临时专利申请No.62/747,293的优先权和权益,该美国临时专利申请的全部内容通过引用并入本文。
技术领域
本发明涉及物质检查领域,目标是探测物质中的各种预定的外来成分。本发明特别用于探测和识别塑料污染物,特别是源自农用塑料产品和/或田地中其它塑料污染源的塑料碎屑。
背景技术
基于塑料和聚合物的材料的使用在增长,已引起对塑料污染和塑料污染物问题的日益重视。特别地,塑料在农业中的使用通常是农作物中和农业生产中的主要塑料污染源。农用塑料产品包括:用于卷绕和保护成捆农作物(例如棉花或干草捆)的塑料膜和塑料网,园艺双股线绳,遮阳网,草坪网,地膜,以及各种农作物包装物。这样的塑料产品的碎屑和碎片可能在产品安装到田地的过程中(例如地膜和遮阳网)、在收获过程中(例如在收获籽棉、玉米或干草时,其中收获的农作物被包装为卷绕捆)形成;或者进一步沿农作物的供应链形成,例如在成捆农作物打开和重新包装的过程中(例如在轧棉机处,其中成捆的卷绕棉花打开、处理并重新包装为标准压缩捆)形成。此外,塑料污染物可源自于其它局部或偶发源。这样的塑料碎屑可具有显著不同的尺寸(从几平方毫米或甚至更小到几十平方厘米),可能会进入到捆好或包装好的农作物中。收获的农作物内的塑料碎屑和碎片会降低农作物和通过这种农作物制成的最终产品的质量(例如,棉花中的塑料碎屑可能影响棉花的染色处理)。另外,在消费型产品的情况下,塑料污染可能具有健康危害。
美国专利No.6,177,113公开一种方法,用于处理食物产品,包括:在利用处理装备或部件进行处理的过程中探测食物产品中的非金属装备碎屑或碎片,所述处理装备或部件的制造材料包括:非金属主组分和大致散布于主组分中的能够探测到的微粒金属组分,使得碎片部分对于在制造过程中的可成形性或在使用过程中的结构完整性不产生显著的不利影响,并且使得复合材料的碎屑或碎片能够利用探测微粒金属组分的机构探测到。
发明内容
现有技术中需要一种在物质中探测和识别预定外来成分的新方式,优选地以能够定位包含这些外来材料的物质部分/碎屑(以例如去除这些部分/碎屑)的方式实现。
就此而言,应注意,拟探测的外来材料是通过对入射(读取/激发)辐射的特定特征辐射响应而能够识别的类型。这样的具有特征辐射响应的材料组分可由特定物质中自然存在的外来成分/发展而来的外来成分(由于物质可能已经暴露于或经受的早先影响/事件所致,例如由于产品腐败和降解所致的材料组分)构成。可替代地,这种具有特征辐射响应的材料组分可通过将预定标记物特意嵌入到外来成分(例如塑料)中而构成以识别/归类所述外来成分(例如关联于所述成分的制造者),所述外来成分可能由于早先的处理/事件而嵌入物质(农作物)的碎屑中。
各种外来成分(例如塑料)承载其特意嵌入成分中(在表面上或在块中)的特定标记物,其方式能够实现:通过对于标记物独特/特定特征辐射响应(辐射印记)的探测而识别标记物及相应外来成分。基于X光或伽玛光辐射的适合的标记物、标记技术和标记物识别技术已被开发出并例如在WO16157185、WO18055625、WO18069917、WO18051353、WO17221246、WO17175219中描述,所有这些专利/专利申请转让给本申请的受让人并通过引用并入本文。
本发明提供一种新的检查系统和方法,允许对物质进行自动或者半自动检查以在所述物质中探测、识别且优选地还定位所述物质的包含特定预定外来成分的碎屑。本发明在物质在生产线上行进的过程中提供这样的检查。
这样,根据本发明一个广义方面,提供一种系统,用于探测和识别出物质中的至少一种预定外来成分,所述系统包括:
测量装置,其包括:辐射源组件,所述辐射源组件包括X光或伽玛光辐射的至少一个源,每个源被构造以产生X光或伽玛光辐射,所述X光或伽玛光辐射具有预定性能和预定辐射发射立体角以激发所述物质的位于所述预定立体角内的区域中的部分,从而引发所述部分的X光响应;探测组件,所述探测组件包括至少一个探测器,所述探测器具有的辐射探测立体角重叠于所述辐射发射立体角,每个探测器被构造能够操作以探测在辐射探测立体角内传播的X光辐射并产生测量数据,该测量数据指示出所探测到的X光响应;所述测量装置被构造能够操作而使得:在所述物质与所述辐射源组件和所述探测组件中的至少一个之间的沿移动路径的相对移位过程中所探测到的所述X光辐射指示出所述物质的所述X光响应的随时间变化;和控制单元,其被构造能够操作而用于与所述探测组件进行数据通信以接收和分析所述测量数据,所述控制单元包括信号处理器,所述信号处理器被构造能够操作以在所述测量数据中识别出信号随时间而变化的样式,所述样式指示所述物质中的承载X光响应标记物的至少一种外来成分的位置。
所述系统可以包括或不包括流水线结构(其被构造能够操作以限定移动路径)。这可例如为管状装置,物质可经由管状装置相对于静止或移动的辐射源和探测器流动;或者可为支撑平台(例如传送器),用于支撑物质和使物质相对于静止或移动的辐射源和探测器移动。
如前所述,本发明特别适用于解决成捆或成包农作物内的塑料碎屑的识别问题,因而在下文中对于此特定应用进行描述。不过,应注意,本发明的原理不受限于此特定应用。
本发明提供对处理(例如在传送带上或管中)过程中的物质(例如农作物)的检查,这是具有挑战性的任务,特别是对于尺寸几平方厘米或更小的小碎屑而言。另外,识别塑料碎屑的源(即,识别产品类型或碎屑所源自的特定产品)可具有显著优点,例如将能够处理塑料污染源和/或对这样的污染分配责任。
优选地,所述移动路径经过(其轴线相交于)所述辐射探测立体角与所述辐射发射立体角之间的重叠区域。
如前所述,可以设置流水线结构,其包括支撑平台,用于支撑所述物质,并且使所述物质相对于所述辐射源组件和辐射探测组件中的至少一个移动。
在一些实施例中,流水线结构包括转移组件,所述转移组件被构造能够操作用于使所述辐射源组件和辐射探测组件中的至少一个相对于所述移动路径而转移。所述转移组件可被构造能够操作用于使所述辐射源组件和所述探测组件均相对于所述移动路径而转移。所述转移组件可以执行所述辐射源组件和所述探测组件的同时转移,使得它们的发射立体角和探测立体角朝向所述移动路径的两个相反的侧向侧取向。
所述信号处理器可以被构造能够操作为,当所述外来成分正移动经过所述重叠区域时整合所述测量数据(其指示出随时间探测到的所述X光响应)。
在一些实施例中,所述源组件和探测组件相对于所述移动路径取向而使得:它们的辐射发射和探测立体角相反于所述物质沿所述移动路径移动的方向,使得当所述物质移动经过由所述重叠区域限定(对准)的检查区时,所述物质与所述源和探测器中的每一个之间的距离减小。检查模式/方案的这种布置使得:所述信号随时间变化的所述样式的特征在于:非对称特征信号峰,其指示出所述至少一种外来成分的所述位置,并当所述距离减小时具有适度升高的信号强度且当所述至少一种外来成分的所述位置离开所述重叠区域时具有急剧降低的强度。这样,能够准确识别出所述至少一种外来成分沿至少一个维度的所述位置。
如前所述,所述信号处理器可以被构造能够操作为,当所述外来成分正移动经过所述重叠区域时整合指示出随时间探测到的所述X光响应的所述测量数据。这将在信号随时间变化样式中突显所述信号峰的非对称特征。
在一些实施例中,相对移位限定大致线性几何形状的移动路径。
可替代地或另外地,相对移位限定曲线移动路径,该曲线移动路径具有与所述重叠区域的边界对准的至少一个曲形部分。
在一些实施例中,所述源组件和所述探测组件装容在所述移动路径的相反的侧向侧处,由此使所探测到的、响应外来成分的X光响应的信号强度的变化减小,而无论处于所述重叠区域中的成块的所述物质中所述响应外来成分的侧向位置如何。所述装容可使得:激发辐射和被探测到的所述X光响应随与所述辐射源和辐射探测器的距离而变化。
所述信号处理器可以被构造能够操作为,通过针对数据库分析所探测到的X光响应信号而识别出所述外来成分,所述数据库存储对应于多个已知X光响应标记物的X光印记。
在一些实施例中,拟识别的所述外来成分包括承载一个或多个X光响应标记物的一种或多种塑料成分。所述信号处理器可被构造能够操作以处理所述测量数据,并产生指示出在所述物质的至少一部分内的塑料成分的量的数据。
在一些实施例中,所述辐射源组件包括:所述X光或伽玛光辐射的至少两个源。该构造可使得:每个辐射源具有相对于所述移动路径取向的所述发射立体角以辐照所述物质的不同侧表面。所述探测组件包括:所述至少一个X光探测器,其具有探测立体角,该探测立体角取向为探测从所述物质的顶表面传播的X光响应信号。
在一些实施例中,所述探测组件包括至少两个探测器,它们的探测立体角相对于所述移动路径取向以接收从所述物质的两个相反的侧表面传播的X光响应信号,所述X光或伽玛光辐射的所述至少一个源的所述发射立体角取向为辐照所述物质的顶表面。
在一些实施例中,所述辐射源组件和所述探测组件相对于所述移动路径而被装容,使得所述发射和探测立体角朝向所述物质的两个不同表面取向。
如前所述,所述移动路径可被构造为或者可包括曲线路径。例如,所述物质流动通过管带。
根据本发明的另一广义方面,提供一种方法,用于检查物质以探测和识别所述物质中的至少一种预定外来成分,所述方法包括:提供被检查物质与检查区(通过X光或伽玛光辐射源的发射立体角与X光辐射探测器的探测立体角之间的重叠区域限定)之间沿预定移动路径的相对移位,使得在所述物质沿所述移动路径移动过程中,探测到的X光辐射包括来自所述物质的相继部分的朝向、穿过和离开所述重叠区域传播的X光响应信号;接收和分析所述X光响应信号,以在所述探测到的X光辐射中识别出信号随时间而变化的样式,所述样式指示出所述物质中的承载X光响应标记物的至少一种外来成分的位置。
如前所述,在一些实施例中,本发明提供一种新的技术,用于识别成捆、包或堆的农作物内的塑料碎屑,其中农作物处于静止状态或移动状态(例如,在处理过程中处于传送带或管上)。更特别地,本发明的检查技术基于对嵌入或施加于一种或多种塑料产品的表面的一种或多种标记物的识别,所述塑料产品是农作物中发现的塑料污染物(例如塑料碎屑)的潜在源,例如用于成捆农作物的卷绕膜或网。标记物可通过本发明的系统利用X光荧光光谱(XRF)分析(例如在前述专利公开物中所述的由本发明的发明人开发用于本发明的方式)进行探测。可探测到的X光信号具有至少0.1KeV的能量。也就是说,被嵌入或施加于塑料产品的一种或多种标记物可以响应于入射(初级)X光或伽玛光辐射而发射X光信号。所述一种或多种标记物发射的X光信号(下文中为响应信号)包括一个或多个特性,且所述特性对应于特定标记物的特征辐射响应并因而识别所述标记物。响应信号因而可用作独特辐射印记(有时称为XRF印记)以识别特定外来成分(塑料产品)。此外,XRF印记可用于编码额外信息,例如外来成分/产品类型和/或产品制造者、制造或运输日期、产品终端用户,等等。能够通过本发明的技术探测和识别的外来成分(例如塑料产品)的标识可例如为:用于防伪和品牌保护以及用于跟踪和供应链管理目的的类型。
被识别的特定标记物可用于识别在农作物中发现的一种或多种塑料污染源。例如,可能在处理后的成捆农作物中发现的塑料碎屑可能来自卷绕成捆收获棉花的塑料膜、用于轧棉机中包装被压缩处理捆的塑料带,或来自棉花田地区域中的其它局部或偶发源。标记该塑料卷绕膜和检查轧棉机中在处理过程中的棉花或处理后的捆,将能够确定塑料卷绕物是否导致处理后的捆内的塑料碎屑。标记该塑料卷绕膜还可用于识别卷绕物的制造者。例如,其可在做了标记的被设计为避免潜在塑料污染的较高质量产品与无标记的较低质量产品之间进行区分。
本发明的技术允许探测和识别出外来成分(例如塑料)的标记碎屑和碎片(其外表面尺寸可能不大于几十平方毫米而且其厚度可能不大于几十微米)。另外,本发明的技术能够探测和识别出位于物质内的外来成分(例如塑料)的标记碎屑,所述物质例如为成捆、包或堆的农作物,可为静止的或移动的(例如在传送带上或管中)。也就是说,不可见的位于物质(例如农作物)内的外来成分(塑料碎屑)可以通过本发明的技术探测和识别。应理解,由于外来成分(塑料碎屑)可具有小尺寸且完全不可见,因而通过光学方法和仪器对其进行探测是不可行的。另外,考虑到不同产品(外来成分)以不同标记物标记,则本发明的技术允许在不同的产品(例如真品和伪品)之间进行识别和区分。在示例中,本发明的技术可用于根据其环境踪迹来区分和识别塑料产品。例如,三种已知类别的塑料产品是可生物降解的、生物基的(产品源自可再生的生物质源,且可再生的生物质源不必是可生物降解的)和“常规的”(不可生物降解的或生物基的)塑料材料,可通过一种、两种或所有三种产品类别进行标记,每种具有不同的标记物。
能够通过本发明探测/识别的标记物可在外来成分的生产过程中通过各种技术(例如挤制、反应挤制、模压、注射成型和其它成形方法)包含到外来成分(塑料产品)内。标记物可在挤制处理中添加到塑料中(例如通过主树脂原料或副给料器实现),形式为树脂、丸粒、粉末或液体的形式。另外,标记物可制备和包括在含有额外添加物的丸粒中。
在不同示例中,标记物可在生产之后通过使用非限制性技术(例如冲压、刷涂、喷涂、吹气刷涂、印制)施加于塑料产品。
这样,在本发明的一些实施例中,提供一种方法,用于探测和识别传送带上的成堆或成块农作物内的在线塑料碎屑和碎片。本发明的检查系统可例如安装在处理设施中,当成块农作物被处理时(即,在生产线上行进时)探测成块农作物内的塑料污染物。在特定示例中,其可安装在轧棉机中,其中收获的棉花(常被包装为卷绕捆)被处理以将纤维与种子分离并被打包为压缩捆用于储存和/或运输。在不同示例中,本发明的系统可安装在用于处理消费农作物(例如谷物、谷类、蔬菜和水果)的设施中。在特定示例中,系统可安装在磨坊中,当谷物被处理时(例如当谷物经历各种分类处理时)探测和识别谷物内的塑料碎屑。
如前所述,根据本发明,对物质检查以探测和识别物质(例如成包农作物)截面中的外来成分(例如塑料碎屑和碎片)在物质与辐射源和/或辐射探测器之间的相对移位过程中执行,例如在物质在传送带上行进(行进方向垂直于物质截面)的过程中进行。激发的X光或伽玛光辐射优选地辐照物质(成块农作物)整个截面。一旦来自辐射源组件的激发辐射到达被标记的外来成分(塑料碎屑),则由外来成分上或外来成分中的标记物所发射的响应信号应到达探测组件的至少一个探测器,使标记物/外来成分的XRF印记可被正确读取/探测。辐射源和探测组件适当构造能够操作以激发标记物,其方式能够使从标记物发射的响应信号具有足够高的频率范围(能量范围)和功率(光子数量)而能够穿过物质(成块农作物)并可被探测到,即,避免物质块的响应信号被削弱至一个或多个探测器处的计数数量无法实现XRF印记的可靠识别的水平。为了能够提供有效的激发,初级辐射的频率范围优选地至少高至标记物发射的频率范围,优选地高至2-4倍。本发明有利地适于探测有机物质(例如农作物)内的外来成分,有机物质由于其重量相对较轻,因而与较重的材料相比,当这种辐射在物质内行进时,不会削弱来自所述源的X光辐射和从物质中的外来成分发射的X光辐射。
在一些实施例中,源组件能够操作以在沿移动路径的相对移位过程中朝向物质连续发射X光,探测器连续探测由物质发射的X光信号并按时间仓(其持续时间可从小于1毫秒至几秒变化)收集数据(即计数/整合)。信号处理器操作以在所探测到的信号的频谱内识别对应于标记物的一个或多个特性(XRF印记)。一旦识别出至少一个标记物的XRF印记,则处理器提供识别出对应于标记物的外来成分(塑料产品)或外来成分的类型的指示和任何其它可对应于特定XRF印记的信息。处理器还可提供关于在传送带上连续移动的物质的区部(所述块的截面乘以对应于一个或多个时间仓的距离)中的外来成分(塑料)污染物的量(以重量或体积测量)的指示。此外,处理器指示出在物质(成块农作物内的塑料碎屑)中的被识别外来成分的位置,即,所述块中塑料污染物所处的区部。
为了提供关于物质中的外来成分的碎屑的测量数据(其精确于量和位置并在短时间内执行),本发明的系统被构造以在每单位时间内收集尽可能多的数据(即,来自标记外来成分的计数)。源自标记外来成分的每秒计数的水平取决于多个因素,包括以下因素中的两个或更多个:物质的所述区部内被源组件激发且被探测器探测到的被标记外来成分的总量;确定标记物XRF印记的频率范围的标记物材料;激发辐射的功率和频率;物质块的截面尺度及其密度(即,每单位体积的质量);以及源-目标-探测器的几何构造(即,辐射立体角和探测立体角中的每个相对于目标(例如其标记物发射响应信号的特定外来成分)的取向,立体角尺寸(即,源组件和探测组件的开孔),从源组件和探测组件中的每个至目标的距离(物质包内和所述包外的距离)。
如前所述,在一些实施例中,所述源组件和探测组件位于移动路径的相反侧上,使得在沿移动路径(例如传送带)移动过程中它们的立体角的方向朝向物质的相反侧。这样的构造具有的优点是:位于物质内的在相反于源组件的侧上(因而与其距离更远)的外来成分更接近于探测组件,反之亦然(接近于源组件的外来成分远离探测组件),使得从源组件至外来成分和从外来成分至探测组件的总距离对于物质包的截面中的所有外来成分而言是相似的(或者对于不同的外来成分而言至少差异不大)。因此,如果从源组件传播到外来成分的激发辐射束因距离而被显著削弱,则由外来成分朝向探测组件发射的辐射响应信号将不会削弱(反之亦然),因而有利于物质包的区部中的标记外来成分的量的测量的准确性。
在一些实施例中,探测组件和源组件不在相同轴线上彼此严格相反定位(使得源组件和探测组件的立体角(开孔)严格彼此面对。例如,探测组件可从由源组件的位置及其立体角方向限定的轴线略微平移,以使从源组件直接到达探测组件的初级激发辐射的量最少。
可替代地,在沿移动路径移动过程中,探测组件可位于物质上方,而源组件装容在相对于探测组件成相对较大角度的物质侧处。
在另外的实施例中,提供两个辐射源,它们位于移动路径的相反侧(在传送带或连续轨道上的物质的相反侧)上,而单个探测器位于移动路径的上方(在所述包的顶表面的上方)。在进一步的实施例中,两个探测器位于移动路径的相反侧(在传送带上的物质的相反侧)上,而单个辐射源位于移动路径的上方(在物质的顶表面的上方)。
仍如前所述,在另一实施例中,被检查物质在管中移动(例如轧棉机中的棉花)。辐射源组件和/或探测组件优选地装容在管带区域处,并可安装在管带中。在沿管的移动过程中接近管带区域时,源组件将初级激发X光或伽玛光束沿其基本传播方向朝向物质发射(即,激发束沿与物质移动方向基本相反的方向传播)。探测立体角朝向移动的物质取向,使得背散射响应信号从物质的激发区域传播。这样的构造可有利于对被标记的外来成分的探测和识别的准确性,从而能够更好地估计物质中外来成分污染物的量,这是因为所有被标记的外来成分碎屑随物质沿移动路径沿朝向源和探测组件和探测器的方向移动,从而避免由于物质中辐射传播路径不同使来自物质不同部分的初级辐射和响应信号被削弱至极大差异水平的情况。
仍如前所述,在本发明的一些实施例中,被检查物质通常是静止的,而源组件和探测组件当沿移动路径平行移动时(使得它们的立体角朝向物质的相反表面取向)扫描所述物质。
附图说明
为了更好理解在本文中公开的主题并示范其可付诸实施,现在将仅利用非限制性示例参照附图描述实施例,其中:
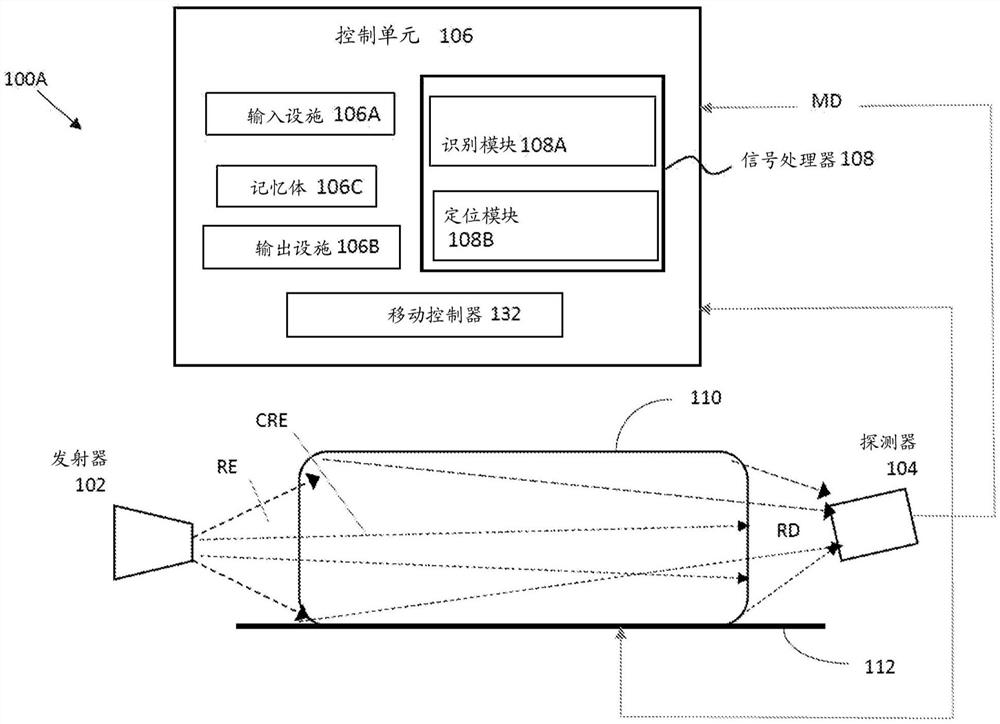
图1是用于检查物质并探测和识别物质中预定的外来成分的本发明的系统的框图;
图2A和2B显示出图1所示系统的示例性构造;
图2C和2D显示出图1所示构造的两个另外的示例;
图3是图1所示系统的构造的另一示例的示意图,其中利用曲线移动路径;
图4是本发明的系统的构造的又一示例的示意图,其中,辐射源和探测组件相对于移动路径可转移。
具体实施方式
参见图1,利用框图例示出系统10,其根据本发明的原理被构造能够操作用于检查物质并探测和识别物质中预定的外来成分。拟由系统10探测和识别的外来成分是所谓“标记的”外来成分,该外来成分的标记具有对预定X光或伽玛光辐射的特征辐射响应,所述特征辐射响应被预先确定并存储在可由系统10访问(通过任意适合的已知通信技术实现)的数据库中。
检查系统10包括的主要结构和功能部件例如为测量装置11和控制单元16。测量装置11包括:辐射源组件12(其包括一个或多个X光或伽玛光辐射源);探测组件14(其包括被构造能够操作探测X光辐射的一个或多个探测器)。每个第i辐射源(i=1,…n)具有预定的辐射发射立体角RE
应理解,辐射传播立体角的特征在于:整体光传播方向(相应地为来自源的方向和朝向探测器的方向)以及角度形状和尺寸(即,相应的源和探测器的视场的形状和尺寸)。对被辐照的介质/空间的体积及其相对于源组件的位置(即,整体辐射传播方向)进行限定/确定的辐射发射立体角通过所述源的开孔来确定(还可能通过所述源中所用的准直仪确定)。应注意,立体角的截面可为任意适合的几何形态/形状和尺度,其沿两个垂直轴线可相等或不相等(所谓的对称或非对称的形状),例如,所述截面可为圆形、卵形(例如椭圆形)或多边形。被辐照的体积将为对应的形状。类似地,空间体积(信号可自此到达探测器)通过辐射探测立体角确定,辐射探测立体角进而通过开孔确定(还可能通过探测器中所用的准直仪确定),这种“可读的”体积在上述含义中可以是对称的或非对称的。就此而言,还应理解,由探测器“读取”的所关注区域的实际体积通过所关注区域内的发射和探测立体角之间的重叠区域限定,如将在下文中更具体所述。
还应理解,如果使用多于一个辐射源而且使用多于一个探测器,则辐射源的数量可以等于或不等于探测器的数量。
测量装置11的构造(即,发射立体角和探测立体角的取向)使得:在发射立体角和探测立体角之间存在至少一个重叠区域OR。重叠区域OR实际上呈现有效检查区。还应理解,源组件12和探测组件14被适当构造,以相应地产生和能够根据拟探测的外来材料(即,标记物)而探测特定频率的X光辐射,即,辐射能够激发特定材料组分以诱发可由探测组件探测到的X光响应信号。探测组件14探测X光响应信号并产生指示出所述X光响应的测量数据MD。
本发明的系统被构造为,使得:测量装置11在所述物质与辐射源组件12和探测组件14中的至少一个之间沿移动路径22进行相对移位过程中执行物质的检查环节。通过这种构造,在沿移动路径相对移位的过程中探测X光响应信号。更特别地,相对移位在所述物质与重叠区域OR(在辐射探测立体角RD
系统10因而可与流水线结构15相关联(例如,可将流水线结构包括为其结构部件或者可与流水线结构共同使用),流水线结构15被构造以支撑所述物质,其支撑方式允许所述物质相对于辐射源和辐射探测器中的一个或多个而流动和/或使辐射源和辐射探测器中的一个或多个相对于所述物质而转移。
控制单元16通常为计算机装置/系统,其具有的主要功能设施例如为数据输入和输出设施16A和16B,记忆体16C,和单个处理器18。控制单元16被构造能够操作用于与探测组件14进行数据通信,以接收和分析所述测量数据MD。
应理解,通常本发明的目的在于:探测物质中是否存在一种或多种外来成分且优选地还探测外来成分的位置,以将所述物质“归类”或“分类”为承载这种外来成分和/或以能够从所述物质中去除外来成分。外来成分是这样的类型:对于初级激发X光或伽玛光辐射提供X光响应。典型地,X光响应是通过在外来成分中嵌入的特定标记物而产生的X光响应。这种情况可使得在物质中探测是否存在任何这样的“标记的”外来成分就足以归类或分类所述物质;或使得在物质中探测和定位任何这样的“标记的”外来成分就足够了;或者可使得需要识别出标记和相应的外来成分,或甚至更进一步,探测本身仅对可识别的外来成分而言是可行的。
因此,在一些实施例中,信号处理器18也被构造为(选择性)访问存储装置30,存储装置30可由内部记忆体16C构成或者可以是能够经由通信网络访问的外部存储装置,在存储装置30中存储有预定的基准数据RD,基准数据RD包括指示出与相应的外来成分相关联的各种标记物的各种X光印记的数据。通常而言,数据库中每个第k外来成分(k=1,…,K)具有与其相关联的、相应一个或多个标记物的一个或多个特征X光印记的编号。为简单起见,在图示的非限制性示例中,外来成分之一(外来成分
更特别地,信号处理器18包括:识别器模块/设施,其被构造能够操作,以在测量数据(其在移动过程中被收集)中识别出指示物质中是否存在一些X光响应成分的X光响应信号(以防物质根本并非X光响应),或者识别出与在数据库中存储有相关联基准数据的外来成分相对应的X光响应信号。优选地,信号处理器中还设置有:定位模块/设施,其被构造能够操作以识别X光响应信号随时间变化的样式并确定相应外来成分的位置。对此,控制单元18还可包括:移动控制器32,其提供指示出物质相对于重叠区域的运动样式的数据。
如将进一步在下文中更具体所示和所述,系统优选地被构造为使得:辐射发射和探测立体角RE
虽然并未具体示出,不过应理解,流水线结构15还可包括:一个或多个驱动单元(其关联于物质支撑平台(例如传送器))、辐射源和探测器中的一个或多个,用于实施沿移动路径的可控的相对移位。
以下描述本发明的上述系统的构造/结构和操作的一些具体但非限制性的示例。在这些非限制性示例中,检查系统被描述为用于探测和识别农作物内的塑料污染物。
参见图2A和2B,示意性例示出检查系统100A,其被构造为基本上类似于前述系统10,即,包括:测量装置(其包括辐射源组件(发射器)102和探测组件(探测器)104);控制单元106。控制单元106包括输入和输出设施106A和106B,记忆体106C,信号处理器108,移动控制器132。信号处理器108包括如前所述构造为能够操作的识别模块108A和定位模块108B。信号处理器如前所述地构造,通过利用从数据库(例如处于外部存储装置中)获得的基准数据,来处理和分析由探测器提供的测量数据MD,数据库在此并未具体示出。图2A和2B分别显示出相对于移动路径的辐射传播方案的示意性前视图和示意性俯视图。系统100A与流水线结构一起使用,流水线结构在此例示为限定移动路径的连续轨道112(构成物质支撑平台)。
这样,系统100A包括:辐射源组件102,其被构造用于将X光或伽玛光辐射朝向在诸如传送带之类的连续轨道112(构成物质支撑平台)上移动的成堆或成块的农作物110(构成物质)发射;以及X光辐射探测器104,用于探测从塑料污染物(可能包含在所述成块的农作物中)发射的X光响应信号,并产生指示出探测到的信号的测量数据MD。信号处理器106(其与探测器104通信)被构造以探测和识别成块农作物内的被标记的塑料污染物。被标记的塑料污染物可以是在农作物培育、收获和处理过程中所用的被标记的塑料产品的碎屑和/或碎片。例如,农用产品例如为:用于卷绕成捆棉花、干草或稻草的塑料卷绕物或网、遮阳网、地膜和各种农作物包装。这样的塑料产品(其可能为农作物中的塑料污染物源)通过标记物标记,标记物包括一种或多种标记物,可根据其特征XRF印记而识别(即,对每个这种标记物的预定激发辐射而言的X光响应信号包括对应于所述标记物的一个或多个独特特性)。
标记物可以在生产过程中通过诸如挤制、模压、注射成型、铸造或其它成形方法之类的方法嵌入到塑料产品中。由于被标记的塑料产品通常为安装在田地中的农用产品,因而产品内嵌入的标记物牢固而且能够承受严酷气候条件。另外,标记物影响塑料产品的牢固性及其承受变化环境条件的能力或其任意性能(例如强度、弹性、紫外稳定性、防水能力、外观,等等)。此外,标记物对塑料产品的生物降解性没有不利影响。在示例中,标记物以小于10,000ppm或小于5000ppm的浓度嵌入塑料产品内或施加于塑料产品。能够通过本发明的系统探测和识别的聚合物标记物的特定示例在前述专利公开物WO 2018/069917(转让给本申请的受让人)中描述。
这样的塑料产品可能由于各种原因而撕裂和/或解体,从而形成碎屑或碎片。例如,安装在田地中的产品件(例如遮阳网或地膜)可能由于来自太阳的紫外(UV)辐射而解体,在处理之前在将网捆卷绕物切割和打开时可能形成塑料碎片(例如轧棉机中的卷绕棉捆)。来自农用产品以及来自局部和/或偶发源的塑料碎屑和碎片可能会进入到处理后的农作物中并可能出现在连续轨道上的整个块体中。
检查系统100A被构造,以探测和识别位于在连续轨道112(构成物质支撑平台)上沿移动路径移动的成块农作物110内任意处的塑料碎屑。应理解,连续轨道112实际上呈现/限定源于成块农作物110与有效检查区(在发射和探测立体角之间的重叠区域)之间相对移位的移动路径。如前所述,这样的相对移位可通过发射器102、探测器104和物质支撑平台中的任意一个或多个的实际移动而实现。
为了识别塑料碎屑,辐射源组件102将激发X光或伽玛光辐射朝向连续轨道112上的成块的农作物110发射。标记的塑料碎屑,当其处于塑料内或塑料上的标记物的区域/位置中被这种激发辐射(具有足够高的功率和频率)辐照时发射出X光响应信号,X光响应信号经过成块农作物以及空气中一段距离并且到达探测器104。成块农作物不可避免地削弱穿过其中的响应信号。因此,为了使响应信号以足够的强度到达探测器以利于准确测量,其应具有:(i)足够强度(即,由标记物发射足够数量的光子);(ii)足够能量(即,每个光子应具有足够能量(或频率))。光子能量越高,则信号在农作物材料(其为有机物,因而为轻质材料)中的吸收越少。辐射源和探测器被适当构造而使得由发射器发射的初级辐射能够激发农作物材料而引发来自标记物(即,与标记物相关联的XRF印记)的可由探测器探测到的响应信号。如前所述,对此,激发辐射的频率至少应高至拟探测的特定标记物的响应信号的频率范围。优选地,来自发射器组件的激发辐射的频率为特定标记物的响应信号的期望/搜索值的2至3倍。在示例中,一个或多个标记物的XRF印记具有在15KeV至90KeV之间的能量范围,因而由发射器组件发射的辐射处于30KeV至270KeV的范围内。标记物的XRF印记的能量范围可在35KeV至80KeV之间,因而由发射器组件发射的辐射处于70KeV至240KeV的范围内。在示例中,标记物可以是响应信号在上述能量范围内的材料。例如,标记物可包括以下成分中的任意一种或多种:Zr,Nb,Mo,Pd,Ag,Cd,In,Sn,Sb,Te,I。
从发射器组件传播到物质(农作物块)中标记物的位置的激发辐射和从标记物的位置传播到探测器的响应信号的削弱均取决于物质介质(农作物块)110的截面尺寸及其密度。由于信号在农作物中的削弱会影响到探测器在单位时间内收集的数据量,因而应高效测量响应信号,在单位时间内收集尽可能多的数据。特别地,测量模式/方案被构造能够探测来自成块农作物110内任意处的标记的塑料碎屑(包括位于所述块的相对于探测器104和相对于发射器组件102的远端上的塑料碎屑)的信号。应注意,在发射器组件102和探测器组件104均位于移动路径相同侧上(即,在成块农作物110的相同侧上)的构造中,位于所述块的相反侧上的塑料碎屑可能难以探测到,这是因为,来自发射器组件的激发辐射由于成块农作物内相对较长的路径而被削弱,导致较弱的响应信号,该响应信号由于通向探测器的相对较长路径而被进一步削弱。
在本发明示例性系统100A中,发射器组件102和探测器组件104位于移动路径112的相反侧上(在成块农作物110的相反侧上),使得位于农作物包块内的在相对于发射器组件102的农作物包块远端上的塑料碎屑不会离探测器104过远。而且,在此示例中,探测器104所处位置略微偏离于辐射发射立体角RE的中心线CRE(发射器开孔中心)。因此,最佳地如图2A中所见,探测器和发射器可被装容而使得:探测立体角和发射立体角并不严格相反设置,而是探测器开孔(限定立体角)取向而使其中心轴线偏离于发射开孔的中心轴线,以最小化从发射器组件102直接到达探测器组件104的初级辐射的量。
发射器组件102将X光或伽玛光辐射朝向成块农作物110的一区部/部分导引(如图2B中所示)。也就是说,在农作物块以方向D沿移动路径(连续轨道)112移动的过程中,来自发射器组件的初级激发辐射不辐照所述块110的整个截面,而是仅辐照其到达和经过重叠区域OR(检查区)的区部/部分。探测器104从农作物块的相继经过重叠区域的区部/部分接收一系列相继产生的X光响应信号。农作物块的可激发区部/部分的尺寸通常由辐射源开孔确定,而农作物块的发射响应信号的所述区部/部分的由探测器探测到的部分通过发射和探测立体角的相交部(即,重叠区域OR)限定。
如前所述,信号处理器106包括:数据输入设施106A(可包括适合的通信模块),用于接收指示出所探测到的X光响应信号的测量数据;记忆体(即,非易失性计算机可读介质)106C,用于存储数据库,所述数据库如前所述被构造用于存储指示出被标记的塑料产品的标识印记和响应信号强度的预选数据;信号处理器设施108,适于识别农作物中的被标记的塑料产品并提供关于其在连续轨道上的位置的指示。信号处理器设施108可进一步包括:识别模块108A,适于分析从探测器104收集的数据,并识别在成块农作物110中发现的各种标记产品的XRF印记;定位模块108B,适于基于由移动控制器提供的数据而对所述块110中的塑料碎屑的位置进行计算和提供指示。
发射器组件102和探测器组件104可连续操作以发射和探测辐射。X光响应信号(在多个能量范围内的计数和/或每秒计数)按时间仓(time bins)收集并存储。也就是说,当被检查物质(例如成块农作物)相对于重叠区域沿移动路径移位(例如在连续轨道112上行进)时,探测到的信号的计数(对应于预选时段Tc的、由物质发射的多个能带中的每个)被收集,对应的测量数据产生并存储在记忆体106C中。信号处理器108分析在相继的时间仓中收集的测量数据的测量数据块,当物质(成块农作物)移动(在连续轨道上行进)时,特定时间仓及其对应的测量数据块与一段长度l=Tc×v相关,其中v是移动速率。信号处理器设施108被构造为:对于所探测到的对应于一种或多种被标记的外来成分(塑料产品)的XRF印记的X光响应信号,识别对应于时间仓及其在物质110中对应区部/部分的测量数据块。信号处理器设施108还可获取成块农作物110的每个区部/部分中发现的塑料碎屑的量(体积或重量)(总量或者每种标记产品或每种类型产品的量)。在示例中,检查系统100A识别农作物的被标记塑料碎屑污染的区部/部分,在可生物降解的、生物基的、和“常规的”不可降解的或生物基型的塑料碎屑之间进行区分。
应注意,本发明的系统中所用的信号处理器可适于使用先进方法而放大、滤波和/或增强所探测到的XRF响应信号。例如,这样的方法在前述专利公开WO 2016/157185(转让给本申请的受让人)中描述,该专利公开物在此通过引用并入本文。
定位模块108B如前所述被构造能够操作对物质中发现有外来成分碎屑的每个区部/部分的位置提供指示。在示例中,定位模块108B指示出物质中外来成分总量高于预选阈值的区部/部分的位置。在进一步示例中,定位模块108B指示出物质中发现有一种或多种特定类型外来成分(例如塑料产品)的量高于预选阈值的每个区部/部分的位置。一旦定位,则这些严重污染的区部/部分可以从所述块中去除以进行清洁,使农作物分离于塑料污染物。在不同示例中,检查系统100A可用于识别外来成分的源(例如塑料污染源)和/或用于评估物质(农作物)的质量。
参见图2C和2D,其为本发明的检查系统的两个另外构造和操作示例。为简单起见,在这些示例中,相同的附图标记用于标示与图2A和2B的示例共同的部件。
在图2C的示例中,显示出检查系统100B,其被构造为基本类似于前述系统10以及示例性系统100A,即,系统100B包括:测量装置,其包括辐射源组件(发射器)102和探测组件(探测器)104;控制单元106。系统100B用于流水线结构,例如连续轨道112,其限定移动路径,用于使物质沿方向D朝向所述源和探测器(朝向和经过所述源和探测器的视场之间的重叠区域OR)移动。控制单元106包括输入和输出设施106A和106B,记忆体106C,信号处理器108,移动控制器132。信号处理器108包括如前所述构造能够操作的识别模块108A和定位模块108B。信号处理器如前所述构造,通过从数据库(例如处于外部存储装置中)获得的基准数据来处理和分析由探测器提供的测量数据MD,数据库在此并未具体示出。系统100B与先前所述示例性系统100A的不同之处在于:系统100B中的构造使得辐射探测立体角RD的中心轴线大致垂直于移动路径的平面,或者换言之,当物质在连续轨道上移动而朝向成块农作物的顶表面发射辐射时,探测器“看”到物质顶表面上(例如位于成块农作物的上方)。对于发射器组件102而言,辐射发射立体角方向朝向移动路径的侧向侧之一,以面对物质(块)的侧表面之一。
在图2D的示例中,显示出检查系统100C,其与前述示例性系统100A和100B的不同之处在于:辐射源组件102包括与探测组件104的单个探测器相关联的两个发射器单元。发射器单元102A和102B相对于移动路径取向而使得:由发射器单元102A和102B发射的X光或伽玛光辐射的初级激发辐射分量的方向朝向移动路径的两个相反的侧向侧,以辐照沿移动路径(在连续轨道上)以整体移动方向D朝向和经过所述源和探测器的视场之间重叠区域OR而移位的物质(成块农作物)的两个相反表面。探测器104相对于移动路径取向(类似于前述示例的系统100B),即,辐射探测立体角RD的中心轴线大致垂直移动路径的平面,或者换言之,探测器“看”到物质的顶表面上,例如位于成块农作物顶表面的上方。用于由两个发射器所发射的初级辐射分量的辐射传播通道和用于传播到探测器的X光响应信号的辐射传播通道在重叠区域OR中重叠。由两个发射器组件102A和102B发射的总辐射可具有更高的功率(也就是说,发射更多光子)。另外,由于两个发射器组件102A和102B位于所述块的相反侧上,因而与其它具有单个发射器组件的构造中相比,到达农作物块的辐射在所述块的截面中更均匀。
现在参见图3,其为本发明的示例性检查系统200的示意性例示图,其构造基本类似于前文描述/例示的系统,不过其中移动路径212是曲线路径,即,具有与重叠区域OR的边界对准的(至少)一个曲形部分212'。这样,检查系统200包括:测量装置,其包括辐射源组件(发射器)102和探测组件(探测器)104;控制单元206。所进行的测量被构造为,在物质沿移动路径以整体移动方向D朝向和经过在源和探测器组件的视场之间的重叠区域OR移动(流动)的过程中检查物质,其中重叠区域对准曲形区域/部分。控制单元206包括输入和输出设施206A和206B,记忆体206C,信号处理器208,移动控制器232。信号处理器208包括如前所述构造能够操作的识别模块208A和定位模块208B。信号处理器如前所述构造,通过从数据库(例如处于外部存储装置中)获得的基准数据来处理和分析由探测器提供的测量数据MD,其中,数据库在此并未具体示出。
系统200可用于当农作物在管内朝向、经过和离开重叠区域OR时识别农作物负载内的塑料污染物。发射器组件202被构造用于使X光或伽玛光辐射朝向在管210内移动的物质(农作物)发射。物质可能包含外来成分(塑料污染物,为碎屑或碎片)。探测器204探测响应于受到所述激发辐射的激发而从外来成分中的标记物发射出的X光响应信号。信号处理器206与探测器204通信,并被构造以探测和识别移动通过管210的物质的相继部分中的被标记的外来成分(管中农作物内的塑料污染物)。如前所述,信号处理器206利用数据库(可存储在记忆体206C或外部存储装置中,其构造基本上类似于前述参照图1的方式)中的预定基准数据,其中基准数据包括被标记的外来成分(塑料产品)的各种标识印记和响应信号强度。信号处理器设施208可被构造能够操作用于识别农作物中的标记塑料产品的碎屑并提供关于其在管中位置的指示。数据处理设施208可进一步包括:识别模块208A,适于分析从探测器204收集的数据,并识别农作物中发现的各种被标记的产品的XRF印记;定位模块208B,适于对农作物中的塑料碎屑的位置进行计算和提供指示。
在本发明的实施例中,系统200利用管的弯部(曲形区域/部分)以提高对被标记的外来成分(塑料污染物)进行测量(探测和定位)的效率和准确性。发射器组件202和探测器204均位于移动路径曲形部分(管的弯部)的近处,其中它们的开孔(辐射发射立体角和探测立体角)面对物质沿移动路径移动的方向(面对进入的农作物),使得发射器组件202在管内将初级激发X光或伽玛光辐射导引朝向物质(沿与物质移动方向相反的方向),探测器204探测沿物质移动方向传播的背散射辐射(即,来自物质中的标记位置的X光响应信号)。
图3中例示的这种系统构造(即,具有曲线移动路径,其通过物质与由重叠区域限定的有效检查区之间的相对移位形成)具有多种优点。当物质(例如农作物)朝向重叠区域(朝向发射器202和探测器204)流动时,在从响应外来成分(标记物)足够近(使响应信号到达探测器204)之处直到探测器204所处的移动路径曲形区域(管带)的时段中,产生测量数据(所探测到的X光响应信号的计数)。因此,可收集更多数据以增强测量的准确性。此外,由于发射器202和探测器204的发射立体角和探测立体角分别面对(方向朝向)管截面和农作物负载朝向其行进,因而所有被标记成分经过探测器204的近处(防止农作物内的外来成分仍远离探测器的情况),从而减小被标记成分通过而未被探测出的可能性。另外,来自被标记碎屑的信号的强度随着碎屑朝向探测器204流动而增大,在碎屑最接近探测器204之处(在此处,农作物流改变流动方向)最大。如图3中所示,管带可大致垂直地改变流动方向,使农作物和被标记碎屑离开由发射器辐射的区域/空间和/或响应信号可由此到达探测器的空间。可探测的响应信号的强度随着标记碎屑朝向探测器204移动而逐渐增大(取决于农作物流动速度),当碎屑到达与探测器的最近点后快得多地减小,然后突然离开由发射器辐照的空间或由探测器“看到”的空间。如果由探测器测量到的计数在足够小的时间仓(例如小于1秒)内收集,则突然减小的响应信号强度以高准确性指示出管中的农作物的存在一个或多个标记碎屑的区部。
发射器组件202和探测器204安置在管内或附接到管壁(使得来自发射器组件的辐射和来自农作物的响应信号在管内发射)可以是有利的,这是因为,这可能需要更少的、用于阻挡散射的辐射到达系统200近处的遮蔽。
现在参见图4,其为本发明又一实施例的示意性例示图。如该图中所示,检查系统300基本类似于任意前述示例性系统构造,即包括:测量装置,其包括辐射源组件(发射器)302和探测组件(探测器)304;控制单元306。控制单元306包括输入和输出设施306A和306B,记忆体306C,信号处理器308,移动控制器332。信号处理器308包括如前所述构造能够操作的识别模块308A和定位模块308B。信号处理器如前所述构造,通过从数据库(例如处于外部存储装置中)获得的基准数据来处理和分析由探测器提供的测量数据MD,其中,数据库在此并未具体示出。系统300可用于识别成捆农作物310内的塑料污染物。发射器组件302被构造使初级X光或伽玛光辐射朝向成捆农作物310发射;成捆农作物可能包含塑料污染物,例如碎屑或碎片;探测器304被构造用于探测从塑料污染物发射的X光响应信号。
在此示例中,提供流水线结构,其包括转移组件320,转移组件320包括适合的驱动机构(在此未示出),驱动机构由移动控制器332操作,用于相对于物质310(成捆农作物)可控地移动发射器组件302和/或探测器组件304或者优选地同时移动发射器组件302和探测器组件304。所述源和/或探测器优选地沿方向D沿平行于移动路径112的轴线移动,由此扫描物质。
成捆农作物310可为处理前的成捆收获农作物(例如在轧棉机中的处理前的棉捆)或者处理后的成捆农作物(例如在轧棉机中的处理后的压缩棉捆)。所述捆310通常可为静止的,而发射器组件302和探测器组件304一起相对于成捆农作物310移动,以扫描所述捆。发射器组件302可以沿平行于移动路径的至少一个侧向侧(即,平行于所述捆的至少一个表面)的一个或多个轴线移动,同时使初级X光或伽玛光辐射朝向所述捆310发射;而探测器304可沿平行轴线(在移动路径的相反侧上)沿所述捆310的一个或多个表面移动(与发射器组件的移动同时进行),从而探测从所述捆310内的被标记塑料碎屑发射的响应信号。为了使得从发射器组件302直接到达探测器304的(初级)辐射的量尽可能少,探测器304并未严格相反于发射器组件302定位(处于通过发射器组件302所发射辐射束的方向限定的轴线上),而是略微分离于所述轴线且其开孔朝向一略有不同的轴线。
在一些实施例中,发射器组件302和探测器304被构造为:当扫描所述捆时分别连续发射和探测辐射。由探测器304所收集的数据存储在记忆体308B中并由信号处理器306处理。信号处理器设施308操作以在测量数据中识别出与一个或多个被标记塑料产品的XRF印记对应的X光响应信号,从而指示出所述捆310内是否存在塑料污染以及可能的塑料污染源。由探测组件304收集的测量数据可在与所述捆的相继扫描区部相对应的预选时段或一系列时段(时间仓)期间收集,或者可替代地可在所述捆的整个扫描期间(对应于所述捆)收集。因此,在示例中,系统300可被构造为,对捆的每个区部中的标记塑料污染物的量提供指示。在不同示例中,系统300被构造为,对整个捆中的标记塑料污染物的量提供指示。在一个方案中,系统300可提供关于所述捆中或者可能所述捆的每个区部中的塑料碎屑的类型及其可能的源(即,塑料碎屑源自的塑料产品)的指示。
这样,本发明提供一种新的物质检查方式,用于在物质与检查系统的一个或多个元件之间的相对移位过程中探测和识别(且优选地还定位)物质中的外来成分。本发明的原理不受限于任何特定类型的物质,也不受限于任何特定的外来成分,只要外来成分是承载X光响应材料的类型即可。
- 用于探测和识别物质内的外来成分的系统和方法
- 用于使外来物质从燃气轮机主流道内排出的方法与装置