收割机试验平台
文献发布时间:2023-06-19 12:07:15
技术领域
本发明涉及农业机械技术领域,尤其涉及一种收割机试验平台。
背景技术
联合收割机是集谷物收割、输送、脱粒、清选、集粮运输等功能于一体的复式作业机械,其广泛应用有效减轻了农民的劳动强度,提高了粮食收获作业的效率,使得粮食及时收获和存储。
随着现代农业机械化进程的不断推进,虽然联合收割机的使用量和保有量都有了显著提高,但是由于联合收割机结构复杂、部件间关联性强、可调参数多、作业工况复杂,在工作过程中不可避免的发生旋转部件间共振动不平衡、关键部位堵塞等问题。
针对联合收割机可能出现的各种问题,技术人员研发了多种室内试验平台,例如为研究多滚筒脱粒分离装置的脱粒分离性能,采用模块化结构研制了多滚筒脱粒分离试验台;为解决传统振动筛分装置不能实现多维振动的问题,设计了基于并联机构的多维振动筛分试验台等。
上述试验台或系统装置是在模拟或再现收割机“谷物流”的基础上搭建的室内固定台架,可移动性差,不能充分模拟收割机工作时各部件的振动特性;部件多以流水式排列组装为主,结构整体性差。
发明内容
本发明提供一种收割机试验平台,用以解决现有技术中试验平台不能充分模拟收割机工作时各部件的振动特性的缺陷。
本发明提供一种收割机试验平台,包括底盘、风机主体、脱谷室、电动机驱动系统、发动机驱动系统和监控系统;所述风机主体、所述脱谷室、所述电动机驱动系统、所述发动机驱动系统和所述监控系统均安装于所述底盘;所述风机主体安装于所述脱谷室,所述风机主体包括风机主动轴;所述电动机驱动系统和所述发动机驱动系统分别与所述风机主动轴选择性接合以驱动所述风机主体转动;所述监控系统连接于所述电动机驱动系统和所述发动机驱动系统,用于监测和控制所述收割机试验平台的工作参数。
根据本发明提供的收割机试验平台,所述电动机驱动系统包括电动机和电动机离合装置,所述电动机离合装置包括皮带传动结构和皮带张紧装置;所述皮带传动结构分别与所述电动机的转轴和所述风机主动轴连接;所述皮带张紧装置固定安装于所述底盘并与所述皮带传动结构选择性接合,所述皮带张紧装置与所述皮带传动结构分离时,所述皮带传动结构的皮带处于松弛状态,所述皮带张紧装置与所述皮带传动结构接合时,所述皮带处于紧绷状态以传递动力。
根据本发明提供的收割机试验平台,所述皮带张紧装置包括皮带张紧轮、张紧轮支臂、支架台、转臂和弹簧牵引组件;所述支架台固定安装于所述底盘,所述张紧轮支臂可转动地安装于所述支架台,所述皮带张紧轮安装于所述张紧轮支臂;所述转臂通过所述弹簧牵引组件与所述张紧轮支臂连接,当所述转臂处于第一转臂位置,所述张紧轮支臂处于使所述皮带张紧轮远离所述皮带的第一位置,当所述转臂处于第二转臂位置,所述张紧轮支臂处于使所述皮带张紧轮压迫所述皮带的第二位置。
根据本发明提供的收割机试验平台,所述弹簧牵引组件包括第一弹簧和拉线;所述第一弹簧和所述转臂通过所述拉线连接,所述第一弹簧连接于所述张紧轮支臂,用于使所述张紧轮支臂随所述转臂的转动而转动至使所述第二位置。
根据本发明提供的收割机试验平台,所述弹簧牵引组件还包括第二弹簧,所述第二弹簧的一端固定连接于所述底盘,另一端固定连接于所述张紧轮支臂,所述第二弹簧与所述第一弹簧位于所述张紧轮支臂与所述支架台的转动连接点两侧。
根据本发明提供的收割机试验平台,所述电动机驱动系统还包括传动换向装置;所述传动换向装置的输入端和所述电动机的转轴连接,所述传动换向装置的输出端通过所述电动机离合装置与所述风机主动轴连接。
根据本发明提供的收割机试验平台,所述发动机驱动系统包括发动机和行走机构,所述发动机连接于所述行走机构,用于驱动所述行走机构带动所述收割机试验平台移动。
根据本发明提供的收割机试验平台,所述监控系统包括发动机控制器局域网络(Controller Area Network,CAN)节点、电动机变频器、电动机通讯协议转换模块和工控机;所述发动机CAN节点用于监测所述发动机的工作参数;所述电动机变频器用于控制所述电动机;所述电动机通讯协议转换模块用于将所述电动机变频器的信号转换为CAN总线的信号;所述工控机用于输出控制信号及显示或存储采集信号。
根据本发明提供的收割机试验平台,所述监控系统还包括遥控器接收器和CAN控制器,所述遥控器接收器用于接收遥控信号,所述CAN控制器用于将所述遥控信号输出至所述CAN总线。
本发明提供的收割机试验平台同时具备发动机驱动和电动机驱动,电动机驱动能为模拟收割机特定机构旋转运动或收割机特定工况提供动力,发动机驱动能模拟收割机本身工作时各旋转部件受发动机振动影响的工况。通过设置两种驱动方式,提高了收割机试验平台模拟收割机工况的准确性,使试验平台可用于多种性能测试。
附图说明
为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
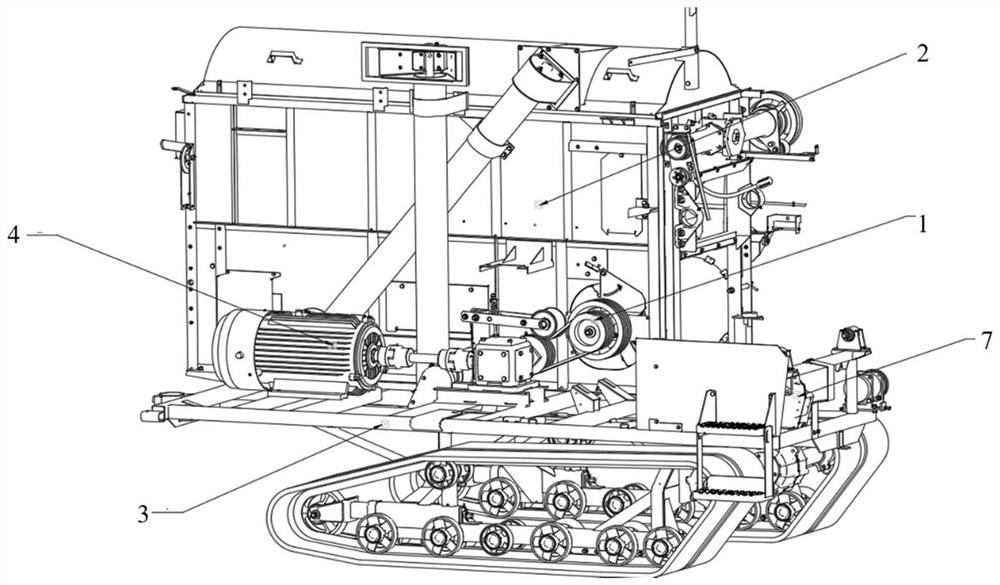
图1是本发明提供的收割机试验平台的结构示意图;
图2是本发明提供的收割机试验平台的电动机拆分结构示意图;
图3是本发明提供的风机主体拆分结构示意图;
图4是本发明提供的电动机离合装置的结构示意图;
图5是本发明提供的张紧轮支臂的正视图;
图6是本发明提供的张紧轮支臂的A-A剖视图;
图7是本发明提供的转臂的正视图;
图8是本发明提供的转臂的侧视图;
图9是本发明提供的弹簧牵引组件的正视图;
图10是本发明提供的支架台的拆分结构示意图;
图11是本发明提供的皮带限位装置的结构示意图;
图12是本发明提供的一种电动机驱动系统的结构示意图;
图13是本发明提供的传动换向装置的拆分结构示意图;
图14是本发明提供的换向箱和换向箱固定座的拆分结构示意图;
图15是本发明提供的监控系统的结构示意图;
附图标记:
1:风机主体; 11:风机主动轴; 12:风机叶片;
13:第一从动轮; 14:外端盖; 15:第二从动轮;
16:第一轴套;
2:脱谷室;
3:底盘;
4:电动机; 41:电动机安装座;
5:电动机离合装置; 51:第一主动轮; 52:皮带张紧轮;
521:第二轴套; 522:隔套; 523:第一轴;
53:张紧轮支臂; 531:支臂件; 532:第一螺杆;
533:第三轴套; 534:第二轴; 535:上拉线座
54:支架台; 541:主离合底座; 542:拉线座支架;
543:连接板; 544:主离合支架; 545:支架管;
546:后固定座; 55:转臂; 551:把手;
552:弧形板; 553:转臂支架台; 554:第四轴套;
56:拉线; 561:拉线座; 57:第一弹簧组件;
571:第一弹簧; 572:第二螺杆; 573:焊接头;
574:堵头; 58:第二弹簧组件; 581:第二弹簧;
582:第三螺杆; 59:皮带限位装置; 591:护板;
592:固定板;
6:传动换向装置; 61:第一星型联轴器; 62:中间轴;
63:第二星型联轴器; 64:换向箱; 65:换向箱固定座;
651:横梁; 652:纵梁;
7:发动机驱动系统;
8:监控系统; 81:发动机CAN节点;
82:电动机变频器; 83:485-CAN模块; 84:遥控接收器;
85:CAN控制器; 86:CAN-USB模块; 87:工控机。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例提供一种收割机试验平台,如图1所示,包括风机主体1、脱谷室2、底盘3、电动机驱动系统、发动机驱动系统7和监控系统8,风机主体1、脱谷室2、电动机驱动系统、发动机驱动系统7和监控系统8均固定安装于底盘3。
风机主体1安装于脱谷室2,风机主体包括风机主动轴11,还包括风机叶片12。风机主动轴11转动带动风机叶片12转动,实现脱谷,脱谷完毕的谷物存储与脱谷室2。
电动机驱动系统和发动机驱动系统7分别与风机主动轴11选择性接合以驱动风机主体1转动。可以理解,电动机驱动系统包括电动机4,发动机驱动系统7包括发动机,电动机4的转轴和发动机的转轴分别与风机主动轴11连接并选择性接合,当其中一个与风机主动轴11处于接合状态时,另一个处于分离状态,由此,风机主动轴11可选择地受电动机4或发动机驱动,并可在两种驱动方式间进行切换。
监控系统8与电动机驱动系统和发动机驱动系统7分别连接,用于监测和控制收割机试验平台的工作参数。例如,监控系统8可以用于监测或控制电动机4和发动机的功率、转速、转向等,还可以用于控制驱动方式的切换。
值得说明的是,本发明实施例所提供的收割机试验平台,其发动机与投入使用的收割机产品的发动机型号相同,其发动机与风机主动轴11的连接方式也相同。因此,当收割机试验平台受发动机驱动系统7驱动时,可以模拟收割机实际使用时的发动机振动特性。并且,电动机4为三相电动机,可为特定部件旋转提供动力。
本发明提供的收割机试验平台同时具备发动机驱动模式和电动机驱动模式两种工作模式,电动机驱动模式能为模拟收割机特定机构旋转运动,发动机驱动能模拟收割机本身工作时各旋转部件受发动机振动影响的工况。通过在两种驱动方式间切换,提高了收割机试验平台模拟收割机工况的准确性,使试验平台可用于多种性能测试。
在上述实施例的基础上,本实施例还提供一种收割机试验平台,其电动机驱动系统包括电动机4和电动机离合装置5。其中,电动机离合装置5包括皮带传动结构和皮带张紧装置。由此,电动机4转轴连接第一主动轮51,风机主动轴11的输入端连接第一从动轮13,同步带皮带套设于第一主动轮51和第一从动轮13,形成皮带传动结构。在原始状态下,皮带张紧装置与皮带传动结构分离,皮带处于松弛状态,即使电动机4转动,其动力也不会传动至风机主动轴11。当收割机试验平台激活电力驱动模式,皮带张紧装置与皮带传动结构接合,皮带被张紧,从而将转动从第一主动轮51传递至第一从动轮13。
值得说明的是,本实施例中风机主动轴11与发动机驱动系统7通过离合器或另一皮带传动结构连接。当通过离合器连接时,发动机转轴连接离合器输入端,风机主动轴11的输入端依次和离合器输出端和第一从动轮13连接。原始状态下,离合器处于分离状态,皮带张紧装置与皮带传动结构分离,皮带也处于松弛状态。发动机驱动模式下,皮带松弛,离合器接合而带动风机主动轴11转动。电动机驱动模式下,皮带紧绷带动风机主动轴11转动,且离合器分离,风机主动轴11的转动不会影响发动机。因此,发动机驱动系统7和电动机驱动系统互不干涉。当风机主动轴11与发动机驱动系统7通过另一皮带传动结构连接,风机主动轴11与发动机驱动系统7之间同样设有另一皮带张紧装置以控制皮带的紧绷或松弛。风机主动轴11上沿轴延伸方向依次连接第一从动轮13和受发动机驱动的第二从动轮15,第一从动轮13和第二从动轮15中的一个受驱动转动时,另一个同时空转而不与皮带啮合。因此,发动机驱动系统7和电动机驱动系统互不干涉。
可选的,其电动机离合装置5还可以为其它结构。例如,电动机4转轴和风机主动轴11直接通过离合器连接,并且风机主动轴11与发动机驱动系统7通过另一皮带传动结构和另一皮带张紧装置连接,发动机驱动系统7和电动机驱动系统互不干涉。
在上述实施例的基础上,可选的,电动机离合装置5包括皮带传动结构和皮带张紧装置,皮带张紧装置包括皮带张紧轮52、张紧轮支臂53、支架台54、转臂55和弹簧牵引组件。
支架台54固定安装于底盘3,作为电动机离合装置5的底座。张紧轮支臂53可转动地安装于支架台54,皮带张紧轮52安装于张紧轮支臂53的一端。转臂55可转动地安装于转臂支架台553,并且通过弹簧牵引组件与张紧轮支臂53连接。转臂55转动时,弹簧牵引组件拉伸或压缩,产生拉力或压力,带动张紧轮支臂53转动,从而可通过转臂55的转动角度控制皮带张紧轮52的位置。原始状态下,转臂55不转动,皮带张紧轮52远离第一主动轮51和第一从动轮13之间的皮带,电动机离合装置5处于分离状态。当转臂55转过某个角度,皮带张紧轮52压迫皮带,皮带同时啮合于皮带张紧轮52、第一主动轮51和第一从动轮13而转动,电动机离合装置5处于接合状态。
可选的,弹簧牵引组件包括第一弹簧571和拉线56。第一弹簧571的固定端固定于电动机离合装置5,自由端受拉线56牵拉,拉线56连接于转臂55。转臂55转动带动拉线56拉伸第一弹簧571,第一弹簧571的自由端连接于张紧轮支臂53并带动张紧轮支臂53转动。当转臂55恢复原始位置,第一弹簧571收缩,带动张紧轮支臂53回到原始位置。
可选的,弹簧牵引组件还包括第二弹簧581。第二弹簧581的固定端固定于底盘3,自由端连接于张紧轮支臂53,且第一弹簧571和第二弹簧581分别位于张紧轮支臂53与支架台54的连接点的两侧。电动机离合装置5的分离状态下,第二弹簧581处于拉伸或压缩状态,为张紧轮支臂53提供使其向远离皮带方向转动的力矩。电动机离合装置5的接合状态下,第二弹簧581提供的力矩增大,而第一弹簧571受拉线56拉伸,其作用于张紧轮支臂53的力提供使张紧轮支臂53向压迫皮带方向转动的力矩,该力矩能够克服第二弹簧581提供的力矩。当电动机离合装置5由接合状态切换为分离状态时,第一弹簧571提供的力矩减小,第二弹簧581提供的力矩保证张紧轮支臂53恢复原位置。
下面通过一个具体的实施例来进一步说明上述特征。如图1-图10所示,本实施例提供一种收割机试验平台,包括风机主体1、脱谷室2、底盘3、电动机驱动系统、发动机驱动系统7和监控系统8,其电动机驱动系统包括电动机4和电动机离合装置5,电动机离合装置5包括皮带传动结构和皮带张紧装置。
如图2所示,电动机4通过电动机安装座41固定于底盘3。电动机安装座41通过焊接的方式固定在底盘3的后部。为满足收割机试验平台的功率需求,电动机4功率选择22Kw,通过螺栓螺母固定在电动机安装座41上。
如图3所示,风机主体1包括风机主动轴11、风机叶片12、第一从动轮13、外端盖14、第二从动轮15和第一轴套16。风机主体1和电动机驱动系统之间通过皮带传动结构和皮带张紧装置选择性接合,则皮带传动结构的第一主动轮51连接于电动机4转轴,第一从动轮13连接于风机主动轴11输入端,外端盖14安装于第一从动轮13外侧以限位。并且,风机主体1和发动机驱动系统7之间通过另一皮带传动结构和另一皮带张紧装置选择性接合,因此风机主动轴11上通过第一轴套16固定有第二从动轮15。第一从动轮13和第二从动轮15沿风机主动轴11延伸方向排列,且直径不同。
如图4所示,电动机离合装置5具体包括第一主动轮51、皮带张紧轮52、张紧轮支臂53、支架台54、转臂55、第一弹簧组件57、第二弹簧组件58。
如图5和图6所示,两根支臂件531组成张紧轮支臂53的骨架,两根支臂件531之间一左一右固定有两根第一螺杆532,第一螺杆532用于固定和限位支臂件531。在张紧轮支臂53的一端,两根支臂件531之间固定有第一轴523,皮带张紧轮52通过第二轴套521和隔套522安装于第一轴523。两根支臂件531在两根第一螺杆532的安装位之间还设有一对轴孔,其上焊接有第三轴套533,用于固定第二轴534(图中未示出)。张紧轮支臂53通过第二轴534可转动地安装于支架台54。在第二轴534的安装位和靠近皮带张紧轮52的第一螺杆532的安装位之间,两根支臂件531之间还安装有上拉线座535。上拉线座535为一个圆柱体,两端面分别固定于两根支臂件531,其圆周面上方设有一个平面,平面中央设有一个沿圆柱体直径方向贯穿圆柱体的通孔。
如图7和图8所示,转臂55通过销轴可转动地安装于转臂支架台553,转臂55和销轴之间安装有第四轴套554。转臂支架台553固定安装于底盘3(图中未示出)。具体地,转臂55由把手551和弧形板552形成,把手551和弧形板552固定连接。绕销轴转动把手551,弧形板552随把手551转动。弧形板552下部与拉线56连接,转臂支架台553下部设有拉线座561,拉线56从弧形板552下部延伸,经拉线座561连接至张紧轮支臂53。
如图9所示,弹簧牵引组件包括第一弹簧组件57和第二弹簧组件58。其中,第一弹簧组件57包括第一弹簧571、第二螺杆572、焊接头573和堵头574。第一弹簧571固定于第二螺杆572,其中,第一弹簧571的固定端与一个堵头574固定连接,堵头574固定连接于第二螺杆572。第一弹簧571环绕第二螺杆572延伸,第一弹簧571的自由端还连接有另一个堵头574,且该堵头574可沿第二螺杆572上下滑动。第二螺杆572穿过上拉线座535的通孔,并且第一弹簧571和堵头574位于上拉线座535上方,连接第一弹簧571自由端的堵头574抵接于上拉线座535的平面上,对第一弹簧571形成限位。由此,第二螺杆572可沿上拉线座535的通孔上下滑动,当第二螺杆572沿通孔向下滑动时,固定端的堵头574随第二螺杆572向下滑动,自由端的堵头574抵接于上拉线座535,两个堵头574之间的距离缩短,第一弹簧571被压缩,向上拉线座535施加向下的压力,从而使张紧轮支臂53转动至压紧皮带的位置。第二螺杆572下部焊接有焊接头573,焊接头573与拉线56固定连接。转臂55转动带动拉线56,拉线56带动第二螺杆572沿通孔向下滑动。
第二弹簧组件58包括第二弹簧581和第三螺杆582。第三螺杆582固定安装于支架台54,第二弹簧581的固定端连接于第三螺杆582,自由端连接于第一螺杆532。可以理解,连接第二弹簧581的第一螺杆532和上拉线座535分别位于第二轴534两侧,其中上拉线座535更靠近皮带张紧轮52。当电动机离合装置5处于接合状态,第一弹簧571被压缩而使张紧轮支臂53转动,第二弹簧581随张紧轮支臂53转动而拉伸。当电动机离合装置5切换至分离状态,第二弹簧581恢复原始状态并带动张紧轮支臂53转动远离皮带。
如图10所示,支架台54包括主离合底座541、拉线座支架542、连接板543、主离合支架544、支架管545和后固定座546。主离合支架544焊接在主离合底座541上,主离合底座541通过螺栓螺母固定在底盘3上,并且开有滑孔,方便支架台54与第一主动轮51之间相对位置的调整。支架管545焊接在主离合支架544上部,第二轴534穿过支架管545,起到固定张紧轮支臂53的作用。后固定座546焊接在主离合支架544一侧,起到固定第三螺杆582的作用。拉线座支架542、连接板543焊接在主离合支架544的另一侧,以固定拉线座561。
在该实施例的基础上,优选的,电动机离合装置5还包括皮带限位装置59。皮带限位装置59通过连接板543安装于支架台54。连接板543上开有滑孔,方便固定和调节皮带限位装置59。具体的,如图11所示,皮带限位装置59包括护板591和固定板592。护板591为与第一主动轮51尺寸适应的弧形件挡板,焊接于固定板592,固定板592连接于连接板543。调节皮带限位装置59的位置,使护板591包裹于第一主动轮51外部,起到防止皮带脱离的作用。
在上述实施例的基础上,可选的,电动机驱动系统还包括传动换向装置6。如图12所示,电动机4的转轴连接传动换向装置6的输入轴,传动换向装置6的输出轴连接第一主动轮51,通过电动机离合装置5,传动换向装置6的输出轴和风机主动轴11选择性接合。通过设置传动换向装置6,不需要保证电动机4和风机主体1同轴安装,节省了安装空间。
具体的,如图13所示,传动换向装置6包括第一星型联轴器61、中间轴62、第二星型联轴器63、换向箱64和换向箱固定座65。电动机4的转轴通过第一星型联轴器61连接于中间轴62,换向箱64的输入轴通过第二星型联轴器63连接于中间轴62,换向箱64固定于换向箱固定座65,换向箱固定座65固定于底盘3。可选的,换向箱64为T8右旋型换向装置。可选的,为保证电动机4和换向箱64的同轴度,换向箱64和换向箱固定座65间有1mm-2mm的调整垫片(图中未示出)。如图14所示,换向箱固定座65包括横梁651和纵梁652,通过焊接的方式固定在底盘3上,换向箱64通过螺栓螺母固定在换向箱固定座65上。
在上述实施例的基础上,发动机驱动系统7包括发动机和行走机构,发动机连接于行走机构,用于驱动行走机构带动收割机试验平台移动。如图1、图2和图13所示,行走机构为履带,发动机可驱动履带移动,从而模拟收割机在实际使用中行走的工况。
在上述实施例的基础上,本实施例提供的收割机试验平台包括监控系统8。如图15所示,监控系统8负责整个收割机试验平台参数的监控,具体的,主要由发动机CAN节点81、电动机变频器82、电动机通讯协议转换模块和工控机87组成。
其中,发动机CAN节点81负责收割机整车线束,可选的,发动机CAN节点81为BOSH-EDC17BASIC控制器。收割机试验平台受发动机驱动系统7驱动而移动或风机主体1转动,其驱动方式与生产使用的收割机的发动机驱动方式相同。发动机CAN节点81主要用于对发动机的信息检测,具体的,BOSH-EDC17BASIC控制器将发动机的机油温度、功率、驱动转速、累计燃油消耗、瞬时燃油消耗、水温、累计工作时长信息打包为CAN报文,发送到CAN总线中;上位机87根据报文,显示对应的发动机参数。
电动机变频器82为电动机4的控制单元,用于控制电动机4的转速、功率和转向等。电动机通讯协议转换模块为485-CAN模块83,用于将电动机变频器82的控制和监测信号转换并发送至CAN控制总线。工控机87是上位机载体,用于输出控制信号及显示/存储采集信号。
可选的,监控系统8还包括CAN-USB模块86,通过CAN-USB模块86读取预设程序,根据预设程序控制电动机变频器82。
可选的,监控系统8还包括遥控接收器84和CAN控制器85。遥控接收器84用于接收工业遥控器(图中未示出)的控制信号,CAN控制器85用于采集遥控接收器84的I/O通道,并将控制信号输出至CAN总线。由此,电动机变频器82还可以通过工业遥控器控制。
下面通过对收割机试验平台的控制方法进一步说明本发明实施例提供的收割机试验平台的监控系统8及其它特征。
首先,根据实际需求确定收割机试验平台的驱动方式。当需要整体移动收割机试验平台和研究发动机振动对旋转部件性能影响时通过发动机驱动系统7驱动;当模拟多工况下堵塞故障,如喂入搅龙堵塞故障、脱粒滚筒堵塞故障等,或研究关键旋转部件间堵塞故障关联性时通过电动机驱动系统驱动。
在对收割机试验平台进行控制之前,对收割机试验平台的当前驱动方式进行校验。通过工控机87判断CAN总线中是否有发动机报文,若有发动机报文,则当前为发动机驱动系统7驱动,若无报文,则当前为电动机驱动系统驱动。进一步,若当前为电动机驱动系统驱动,可以查询当前电动机4的工作状态。工控机87向CAN总线发送“查询”类报文,电动机4的转速、转向、输出功率、控制模式等信息经电动机变频器82和485-CAN模块83转换后发送到CAN总线中。工控机87根据反馈类报文显示转速、转向、输出功率、控制模式显示等信息。
根据实际需要,可对驱动模式进行切换。从发动机驱动系统7驱动转换为电动机驱动系统驱动的方式是:参考收割机说明书切断发动机驱动系统7动力输入,转动转臂55使电动机离合装置5接合,激活电动机驱动系统。从电动机驱动系统转换为发动机驱动系统7的方式是:断开电动机离合装置5,发送CAN报文使电动机4状态复位,激活发动机驱动系统7。
对于电动机驱动系统,可以选择程序控制模式或遥控控制模式。若为程序控制模式,工控机87通过CAN-USB模块86读取硬盘中存储的启动过程功率谱、加速过程功率谱、正常工况功率谱、减速过程功率谱数据等数据,工控机87将读取的功率谱数据转换为控制类CAN报文,输出至电动机变频器82,控制电动机4的转速和功率。若为遥控控制模式,CAN控制器85将遥控接收器84的控制通道信息转换为CAN报文,工控机87根据反馈类报文将工业遥控器的控制信息显示在显示屏上。当工业遥控器改变控制变量,上位机将控制类CAN报文输出至电动机变频器82,改变电动机4的转速和功率。
在电动机驱动系统驱动的过程中,可以对电动机4状态进行自检和复位。由于振动筛特性限制,需要确保电动机4只能驱动风机主体1绕一个方向转动。若工控机87采集当前电动机4转向符合要求,则允许电动机4继续启动,若转向不符合要求,则通过工控机87在显示屏上显示相关提示,并进入控制模式选择状态。工控机可以发送CAN报文使电动机4复位,即控制电动机4转速为0,输出功率设定为额定值,控制模式设置为程序控制模式或遥控设置模式。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 收割机试验平台
- 农作物联合收割机转矩载荷试验平台