一种基于光学陀螺量测信息的天文导航姿态传递方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及天文导航技术领域,尤其涉及一种基于光学陀螺量测信息的天文导航姿态传递方法。
背景技术
天文导航系统由星体跟踪器和惯性水平基准组成,二者之间依靠机械结构件连接。机械结构受应力释放、温度变化、载荷压力等因素的影响,不可避免在高频、低频形变角,导致星体跟踪器机械安装参考面和惯性水平基准参考面之间存在安装误差角。天文导航实际定位解算过程,需要获取星体跟踪器的测星信息和惯性水平基准的姿态信息,若不提前获取并补偿星体跟踪器和惯性水平基准之间存在的安装误差角,安装误差角将被等效成惯性水平基准姿态误差的一部分,最终影响天文导航定位精度。
因此,传统天文导航采用共方位轴式或实验室标定的方法,获取星体跟踪器和惯性水平基准之间的安装误差。共方位轴式天文导航系统将星体跟踪器的方位轴与惯性水平基准的方位轴集成设计,根据共方位轴式天文导航可自动标校的特点,获取星体跟踪器和惯性水平基准之间的固定安装误差角,从技术体制上重塑星体跟踪器和惯性水平基准之间的位置关系,技术改造成本太高;实验室标定的方法指的是星体跟踪器和惯性水平基准在装备使用前或者装备维修过程中,利用实验室标定设备进行安装误差计算,这种方法的灵活性、保障性较差,难以进行在线实时标定安装误差,且无法防范慢变的安装误差。
发明内容
本发明针对现有技术中存在的技术问题,提供一种基于光学陀螺量测信息的天文导航姿态传递方法,解决现有技术中惯性水平基准和星体跟踪器之间存在的慢变或固定安装误差难以估计的问题。
本发明解决上述技术问题的技术方案如下:一种基于光学陀螺量测信息的天文导航姿态传递方法,其特征在于,所述方法包括:
步骤1,采用线性卡尔曼滤波模型建立天文导航系统的状态模型:
其中,j表示所述天文导航系统的第j个时间段,k表示第k次滤波更新周期;
步骤2,基于动态安装误差角的随机运动规律确定所述状态一步转移矩阵
步骤3,根据惯性水平基准和测星组件的角速度信息确定所述天文导航系统的量 测矩阵
步骤4,计算所述星体跟踪器和惯性水平基准之间不同转动位置下所述总安装误 差角
步骤5,根据所述转动策略和所述天文导航系统的状态模型确定所述总安装误差 角
本发明的有益效果是:本发明提供的一种基于光学陀螺量测信息的天文导航姿态传递方法,针对天文导航中惯性水平基准姿态传递至星体跟踪器用于天文导航解算,所面临的惯性水平基准和星体跟踪器之间存在的慢变或固定安装误差难以估计的问题,通过给星体跟踪器加装三轴陀螺仪实现星体跟踪器光学陀螺角速度测量,计算星体跟踪器陀螺角速度与惯性水平基准陀螺角速度差值,以角速度差值作量测信息设计并推导星体跟踪器和惯性水平基准之间的慢变安装误差估计模型,以慢变安装误差、星体跟踪器陀螺误差、惯性水平基准陀螺误差为误差估计量,完成天文导航惯性水平基准姿态向星体跟踪器的高精度传递任务。
在上述技术方案的基础上,本发明还可以做如下改进。
进一步,所述姿态传递方法还包括:定义所述天文导航系统中的星体跟踪器坐标系m系和惯性水平基准坐标系s系,所述m系和s系分别以所述星体跟踪器和惯性水平基准的左下角为原点,右、前和上为X、Y和Z轴方向;
基于所述星体跟踪器坐标系m和惯性水平基准坐标系s确定所述状态信息矩阵
进一步,所述步骤1中,选择所述状态信息向量
其中,
进一步,所述步骤2中用二阶马尔可夫过程描述所述动态安装误差角的随机运动规律:
式中,
对应的滤波器模型为:
式中,
进一步,所述步骤2中,基于动态安装误差角的随机运动规律确定所述状态一步转 移矩阵
式中:
进一步,所述步骤3中以惯性水平基准和测星组件之间的角速度差值作量测:
其中,
进一步,所述步骤4中以j=1开始,计算各个时间段的所述可观测度,包括:
步骤401,计算第j个时间段的可观测矩阵
步骤402,确定当前的提取观测矩阵
步骤403,对所述提取观测矩阵进行奇异值分解
步骤404,根据所述量测信息向量
步骤405,r个状态
进一步,所述步骤1之前还包括:对所述天文导航系统进行粗大安装误差标校;
所述粗大安装误差标校包括:粗大方位安装误差标和校粗大俯仰安装误差标校。
进一步,所述步骤5包括:
根据所述总安装误差角
计算所述姿态矩阵
采用上述进一步方案的有益效果是:提出的针对星体跟踪器和惯性水平基准之间安装误差的估计方法,无需利用实验室参考基准设备,也无需对原设备进行共方位轴式设计,仅利用已有的陀螺输出角速度即可实现安装误差的在线估计;既可以估计固定安装误差,也可以估计慢变安装误差,甚至对部分动态安装误差均有估计作用,所设计星体跟踪器陀螺角速度和惯性水平基准陀螺角速度之差作卡尔曼滤波量测信息,具备滤波模型维数小、估计效率高的特点,可在短时间内估计出相对安装误差,实现天文导航惯性水平基准姿态的高精度传递,提高天文导航测量及定位精度。
附图说明
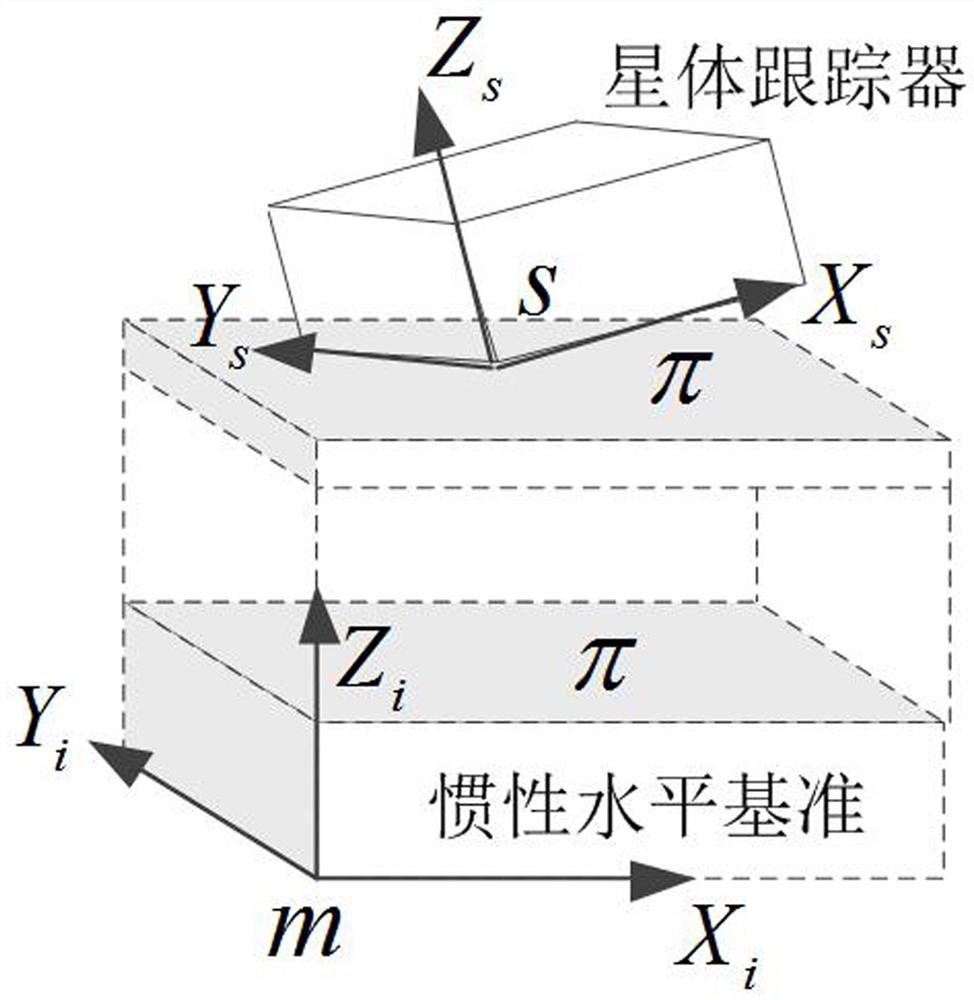
图1为本发明实施例提供的一种天文导航系统中定义的星体跟踪器坐标系和惯性水平基准坐标系的示意图。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
本发明针对惯性水平基准和星体跟踪器分开安装而导致二者之间固定安装误差角或慢变安装误差角难以在线标定的问题,设计天文导航安装误差角在线标定方法,降低惯性水平基准姿态传递至星体跟踪器的误差,实现惯性水平基准和星体跟踪器之间姿态的高精度传递。
为建立惯性水平基准和星体跟踪器之间的姿态传递模型,利用惯性水平基准和星体跟踪器共同通过各自陀螺仪敏感同一个载体角速度的特点,设计以惯性水平基准光学陀螺角速度和星体跟踪器光学陀螺角速度之差作为量测信息的卡尔曼滤波模型,结合形变误差模型,在线估计二者之间的固定安装误差角或慢变安装误差角,补偿惯性水平基准姿态,提高天文导航位置精度。
本发明提供一种基于光学陀螺量测信息的天文导航姿态传递方法,包括:
步骤1,采用线性卡尔曼滤波模型建立天文导航系统的状态模型:
其中,j表示天文导航系统的第j个时间段,k表示;
步骤2,基于动态安装误差角的随机运动规律确定状态一步转移矩阵
步骤3,根据惯性水平基准和测星组件的角速度信息确定天文导航系统的量测矩 阵
步骤4,计算星体跟踪器和惯性水平基准之间不同转动位置下总安装误差角
步骤5,根据转动策略和天文导航系统的状态模型确定总安装误差角
本发明中的天文导航系统,其星体跟踪器和惯性水平基准分开安装,充分利用星体跟踪器和惯性水平基准的陀螺角速度信息,推导角速度信息与安装误差角之间的关联模型,设计基于最优估计理论的卡尔曼滤波模型,实现星体跟踪器和惯性水平基准之间慢变或固定安装误差的实时估计,最终实现惯性水平基准姿态高精度传递至星体跟踪器。
本发明提供的一种基于光学陀螺量测信息的天文导航姿态传递方法,针对天文导航中惯性水平基准姿态传递至星体跟踪器用于天文导航解算,所面临的惯性水平基准和星体跟踪器之间存在的慢变或固定安装误差难以估计的问题,通过给星体跟踪器加装三轴陀螺仪实现星体跟踪器光学陀螺角速度测量,计算星体跟踪器陀螺角速度与惯性水平基准陀螺角速度差值,以角速度差值作量测信息设计并推导星体跟踪器和惯性水平基准之间的慢变安装误差估计模型,以慢变安装误差、星体跟踪器陀螺误差、惯性水平基准陀螺误差为误差估计量,完成天文导航惯性水平基准姿态向星体跟踪器的高精度传递任务。
实施例1
本发明提供的实施例1为本发明提供的一种基于光学陀螺量测信息的天文导航姿态传递方法的实施例,该实施例由实施条件、实施过程组成。
实施条件:具备星体跟踪器和惯性水平基准分离安装的天文导航样机,样机中惯性水平基准输出正确的经度、纬度、姿态,样机中星体跟踪器上需安装三轴互相正交的陀螺仪,具备正确的测星功能,样机中俯仰测角和方位测角功能正常,天文导航设备处于自然静止状态。
实施过程:实施过程包括粗大安装误差标校、设计惯性水平基准和星体跟踪器之间的相对转动策略、安装误差角计算和姿态高精度传递。
一、对天文导航系统进行粗大安装误差标校。
粗大安装误差标校包括:粗大方位安装误差标和校粗大俯仰安装误差标校。
1)粗大方位安装误差标校
星体跟踪器的光轴指向、惯性水平基准前向载体轴指向和方位测角零位指向,安装时理论上三者指向重合,但由于初始安装方式、安装位置的不同,三者指向不重合,可能存在较大的安装误差角,通过记录标校起始点惯导的方位,并驱动伺服系统直至将星目标近似拉入视场中心后,将当前时刻惯导输出的方位与起始点惯导方位做差后,作为粗大方位安装误差,补偿方位测角输出值。
2)粗大俯仰安装误差标校
天文星历计算出目标星点的地平高度角后,转动俯仰轴直至星目标进入视场,此时俯仰测角包含粗大俯仰安装误差,俯仰测角与惯导姿态共同计算出一组地平高度角,该组地平高度角与根据天文星历计算的地平高度角之间差值的一半,即为粗大俯仰安装误差,根据补偿俯仰测角输出值,获取较为准确的俯仰测角。
二、设计惯性水平基准和星体跟踪器之间的相对转动策略、安装误差角计算的过程,惯性水平基准陀螺仪角速度和星体跟踪器光学陀螺角速度之差作量测,估计二者之间的安装误差时,安装误差的估计速度、估计精度还取决于二者在俯仰轴方向和方位轴方向上是否存在相对角位置变化,故需要设计惯性水平基准和星体跟踪器之间的相对转动策略,设计依据为分段线性定常可观测性理论,根据该理论中可观测度大小衡量安装误差角的估计速度和估计精度,可观测度越大安装误差角的估计速度越快、估计精度越高,可观测度越小安装误差估计速度越慢、估计精度越低。
主要包括坐标系及安装误差定义、状态模型构建和量测模型推导三个部分。通过坐标系及安装误差定义,使星体跟踪器和惯性水平基准之间复杂的安装误差在数学和物理含义上变得直观,通过状态模型构建和量测模型推导,清晰展示惯性水平基准光学陀螺角速度和星体跟踪器光学陀螺角速度之差作量测信息的姿态传递方法的数学推导脉络。
1)坐标系及安装误差定义
定义天文导航系统中的星体跟踪器坐标系m系和惯性水平基准坐标系s系,m系和s系分别以星体跟踪器和惯性水平基准的左下角为原点,右、前和上为X、Y和Z轴方向。
基于星体跟踪器坐标系m和惯性水平基准坐标系s确定状态信息矩阵
具体实施中,如图1所示为本发明实施例提供的一种天文导航系统中定义的星体跟踪器坐标系和惯性水平基准坐标系的示意图,结合图1,如下几类坐标系和安装误差:
①惯性水平基准坐标系m:
②星体跟踪器坐标系s:
③惯性水平基准陀螺零偏:
④星体跟踪器陀螺零偏:
⑤固定安装误差角:
⑥动态安装误差角:
⑦总安装误差角:
⑧惯性水平基准参考面:π。
其中,下标x,y,z分别表示坐标系中纵向、横向和航向三个方向。
星体跟踪器与惯性水平基准之间的安装误差角称为总安装误差角
总安装误差角指以惯性水平基准参考面π为参考基准、同一时刻s系相对m系的姿 态误差角,惯性水平基准参考面π代表的坐标系与
2)状态模型构建
步骤1,采用线性卡尔曼滤波模型建立天文导航系统的状态模型:
其中,j表示天文导航系统的第j个时间段,k表示第k次滤波更新周期;
优选的,选择状态信息向量
其中,
步骤2,基于动态安装误差角的随机运动规律确定状态一步转移矩阵
优选的,步骤2中用二阶马尔可夫过程描述动态安装误差角的随机运动规律,即当前时刻的动态安装误差角只与前两个时刻的动态安装误差角有关而与更早时刻的动态安装误差角无关:
式中,
对应的滤波器模型为:
式中,
进一步的,基于动态安装误差角的随机运动规律确定状态一步转移矩阵
式中:I表示单位矩阵。
3)量测模型推导
步骤3,根据惯性水平基准和测星组件的角速度信息确定天文导航系统的量测矩 阵
优选的,量测模型推导过程包括:惯性水平基准理论角速度
式中,
式中,
惯性水平基准、测星组件的理论角速度和测量角速度之间的关系为:
式中:
式(7)、(8)代入(6)可以得到:
惯性水平基准和测星组件测量角速度之差为:
步骤3中以惯性水平基准和测星组件之间的角速度差值作量测:
式中,
步骤4,计算星体跟踪器和惯性水平基准之间不同转动位置下总安装误差角
优选的,步骤4中以j=1开始,计算各个时间段的可观测度,包括:
步骤401,计算第j个时间段的可观测矩阵
步骤402,确定当前的提取观测矩阵
步骤403,对提取观测矩阵进行奇异值分解
计算第j个时间段提取观测矩阵的奇异值
步骤404,忽略小量奇异值后的非零奇异值个数为r,根据量测信息向量
步骤405,r个状态
其中,
当前时间段j不是最后一个定常分段时,令j=j+1循环执行步骤401-405。
步骤5,根据转动策略和天文导航系统的状态模型确定总安装误差角
步骤4中确定合适的转动策略后,即可通过卡尔曼滤波器实现固定安装误差角、动 态安装误差角的在线估计,同时也可估计出星体跟踪器和惯性水平基准陀螺常值零偏。固 定安装误差角和动态安装误差角之和即为总安装误差角,总安装误差角与安装误差矩阵
星体跟踪器进行天文测量计算所用姿态矩阵
上式即实现了惯性水平基准姿态向星体跟踪器姿态的高精度传递,间接提高天文导航位置精度。
本发明提供一种基于光学陀螺量测信息的天文导航姿态传递方法,提出的针对星体跟踪器和惯性水平基准之间安装误差的估计方法,无需利用实验室参考基准设备,也无需对原设备进行共方位轴式设计,仅利用已有的陀螺输出角速度即可实现安装误差的在线估计。
本发明所提出的安装误差估计方法,既可以估计固定安装误差,也可以估计慢变安装误差,甚至对部分动态安装误差均有估计作用,所设计星体跟踪器陀螺角速度和惯性水平基准陀螺角速度之差作卡尔曼滤波量测信息,具备滤波模型维数小、估计效率高的特点,可在短时间内估计出相对安装误差,实现天文导航惯性水平基准姿态的高精度传递,提高天文导航测量及定位精度。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于光学陀螺量测信息的天文导航姿态传递方法
- 一种基于光学陀螺量测信息的天文导航姿态传递方法