一种可跨越障碍的水空两栖无人船及控制方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及智能船舶技术领域,特别涉及一种可跨越障碍的水空两栖无人船及控制方法。
背景技术
随着我国城市化进程的加快,水环境污染、水生态损害和水资源短缺等问题日益突出,为推进河湖系统保护和水生态环境整体改善,目前主要依靠工作人员赴现场巡查、通过肉眼观察发现问题。对于一些复杂水域,工作人员通过乘坐船舶靠近目标水域进行观察,或者用无人船进行遥控观测,在实际工作的过程中,遇到了以下的困难:(1)城郊的河道里有居民布置的渔网横亘在河道里,或者河道中央筑有水坝,阻碍船舶的航行。(2)部分河道深浅不一,在浅水区域,水藻较多,船舶有搁浅和推进器被水藻缠绕损坏的风险。对于上面出现的问题,通常的解决方法是:如果能绕过前方障碍区域,则改道前行,如果无其他可行路线,则将船开至岸边,把船抬上来,找个水况良好的地方,再将船放下水,但这样的方案费时费力。因此设计一款可以跨越水面障碍的水空两栖无人船及控制方法则是十分必要的。
发明内容
本发明的目的是提供一种可跨越障碍的水空两栖无人船及控制方法,在正常水域,本发明的水空两栖无人船通过推进器提供的动力前行。通过搭载在水空两栖无人船上的传感器检测到前方有障碍,水空两栖无人船无法航行通过时,工作人员通过远程操控模块,无线遥控水空两栖无人船上的旋翼打开。通过旋翼带动水空两栖无人船飞过该障碍区域,到达合适水域再降落,从而提高水空两栖无人船的持续工作能力。本发明的水空两栖无人船可以根据需求自由切换航行状态和飞行状态,使用更为灵活,能够满足复杂水域的工作需求。
为了达到上述目的,本发明提供一种可跨越障碍的水空两栖无人船,包含:远程操控模块,船体,设置在船体的感知模块、控制模块、航行执行模块、飞行执行模块、多个模式转换模块;
所述感知模块用于采集所述无人船的环境信息、航行信息、飞行信息;
所述控制模块信号连接所述感知模块、航行执行模块、飞行执行模块、模式转换模块;控制模块还无线通讯连接所述远程操控模块;通过控制模块无线发送所述环境信息、航行信息、飞行信息发送给所述远程操控模块;
所述远程操控模块基于接收的环境信息、航行信息、飞行信息生成模式转换指令、航行控制指令、飞行控制指令,并发送给控制模块;
航行执行模块、飞行执行模块基于控制模块发送的航行控制指令、飞行控制指令,控制无人船的航行姿态、飞行姿态;所述模式转换模块基于控制模块发送的模式转换指令实现无人船进行飞行模式与航行模式的转换。
可选的,感知模块包含:
图像采集单元,用于获取无人船周围的环境图像;
GPS,用于获取无人船的地理位置信息;
激光雷达,用于感知无人船周围的障碍物;
惯性测量单元,用于获取无人船的航行、飞行姿态;
气压计,用于获取无人船的飞行高度。
所述航行控制指令包含:航行方向控制指令、航行速度控制指令;所述飞行控制指令包含:飞行方向控制指令、飞行速度控制指令;
所述远程操控模块包含:
显示屏,用于可视化的显示所述环境信息、航行信息、飞行信息;
操作手柄,用于生成所述航行方向控制指令和飞行方向控制指令;
模式切换开关,用于生成所述模式转换指令;
调速旋钮,生成所述航行速度控制指令、飞行速度控制指令;
第一无线通讯模块,用于实现远程操控模块与控制模块之间的双向数据传输。
可选的,所述控制模块包含:
模/数转换单元,用于转换感知模块采集的模拟量的环境信息、航行信息、飞行信息为对应数字量的环境信息、航行信息、飞行信息;
第二无线通讯模块,其信号连接所述模/数转换单元、主控制器,用于无线发送所述数字量的环境信息、航行信息、飞行信息给远程操控模块;并无线接收远程操控模块发送的模式转换指令、航行控制指令、飞行控制指令;
主控制器,基于第二无线通讯模块接收的模式转换指令、航行控制指令、飞行控制指令驱动模式转换模块、航行执行模块、飞行执行模块工作。
可选的,所述船体左右对称的设有两个螺旋桨,所述航行执行模块包含:
两个推进器电机,分别对应两个螺旋桨;推进器电机的输出端传动连接对应的螺旋桨;
直流电机驱动器,电性连接在主控制器与推进器电机的控制端之间;直流电机驱动器接收主控制器发出的航行控制指令,控制两个推进器电机的转速及转速差,实现控制无人船的航速及航向。
可选的,所述模式转换模块包含:多个旋翼、第一PWM信号发生器;所述旋翼包含:内机臂、内机臂舵机、外机臂、外机臂舵机、内机臂舵角传感器、外机臂舵角传感器;
所述内机臂舵机固定设置在船体,内机臂第一端固定连接内机臂舵机输出端;所述外机臂舵机固定设置在内机臂第二端,外机臂第一端固定连接外机臂舵机输出端;
内/外机臂舵机控制端通过第一PWM信号发生器连接主控制器;第一PWM信号发生器根据主控制器发送的模式转换指令生成对应的PWM信号,驱动内/外机臂舵机正、反转;
所述内/外机臂舵角传感器连接设置在内/外机臂舵机输出端与主控制器之间,用于检测内/外机臂舵机输出端的转动角度,并生成对应的第一/第二角度检测信号;
主控制器基于第一/第二角度检测信号生成内/外机臂舵机停止指令;第一PWM信号发生器根据内/外机臂舵机停止指令生成对应的PWM信号,驱动内/外机臂舵机停止工作。
可选的,所述飞行执行模块包含:多个旋翼桨叶电机、多个旋翼桨叶、电子调速器、第二PWM信号发生器;
所述旋翼桨叶电机、旋翼桨叶设置在对应外机臂的第二端,一个外机臂对应一个旋翼桨叶电机、一个旋翼桨叶;旋翼桨叶电机的输出端传动连接对应旋翼桨叶;
主控制器依序通过第二PWM信号发生器、电子调速器连接旋翼桨叶电机控制端;所述第二PWM信号发生器其根据主控制器发送的飞行控制指令生成对应的PWM信号,电子调速器根据接收的PWM信号控制旋翼桨叶电机工作。
可选的,所述可跨越障碍的水空两栖无人船还包含电源模块,用于为航行执行模块、飞行执行模块、模式转换模块供电提供工作电能。
本发明还提供一种水空两栖无人船的控制方法,采用本发明所述的水空两栖无人船实现的,包含步骤:
S1、将两栖无人船放入水中,初始化并自检各模块;自检合格,进入S2;
S2、通过远程操控模块100获取无人船周围的图像信息,当判断无人船无法绕过前方障碍,通过远程操控模块100发送指示无人船开始航行的航行控制指令,航行执行模块300驱动无人船航行;否则,进入S3;
S3、通过远程操控模块发送指示无人船停止航行的航行控制指令,航行执行模块停止工作,无人船停止航行;通过远程操控模块发送由航行模式转为飞行模式的模式转换指令,模式转换模块的内机臂、外机臂旋转展开设定的角度;
S4、通过远程操控模块发送指示无人船开始飞行的飞行控制指令,旋翼桨叶旋转,两栖无人船进入飞行状态;通过远程操控模块遥控无人船飞行至无障碍水域,缓降飞行高度;待无人船停稳在水面时,通过远程操控模块发送指示无人船停止飞行的飞行控制指令,旋翼桨叶停止旋转;
S5、通过远程操控模块发送由飞行模式转为航行模式的模式转换指令,内机臂、外机臂旋转收回至初始位置;重复步骤S2至S5。
可选的,所述自检各模块包含:
检查内、外机臂能否展开设定角度并恢复初始状态;
检查推进器电机是否能够正常工作;
检查远程遥控模块是否能够获取感知模块采集的环境信息。
与现有技术相比,本发明的有益效果在于:
1)本发明的可跨越障碍的水空两栖无人船及控制方法,解决了目前无人船在航行过程中会遇到各种难以跨越的障碍,无法工作在复杂水域的问题。在正常水域,本发明的水空两栖无人船为航行状态;在复杂水域,当水空两栖无人船无法航行通过时,其转换为飞行状态,并飞行至合适水域再降落。本发明的水空两栖无人船能够满足复杂水域的工作需求,无需通过人工搬运至水况良好的地方,从而提高了水空两栖无人船的持续工作能力和工作效率。
2)本发明中,工作人员基于水空两栖无人船上的感知模块,实时获取水空两栖无人船周围的环境信息,通过无线遥控的方式控制水空两栖无人船在各状态之间变换,并能够通过感知模块实时获取水空两栖无人船的航速、航向、飞行高度、飞行姿态,保障了水空两栖无人船的工作安全;本发明的水空两栖无人船易于进行控制操作,控制精度高。
3)本发明的水空两栖无人船采用模块化设计,各个模块易于维护、更换,便于后期改造升级;
4)本发明的各个模块外部均设有防水层,各个连接处采用防水密封圈加防水胶处理,具有很好的防水性能,使用寿命高。
附图说明
为了更清楚地说明本发明技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图:
图1位本发明可跨越障碍的水空两栖无人船的各模块连接示意图;
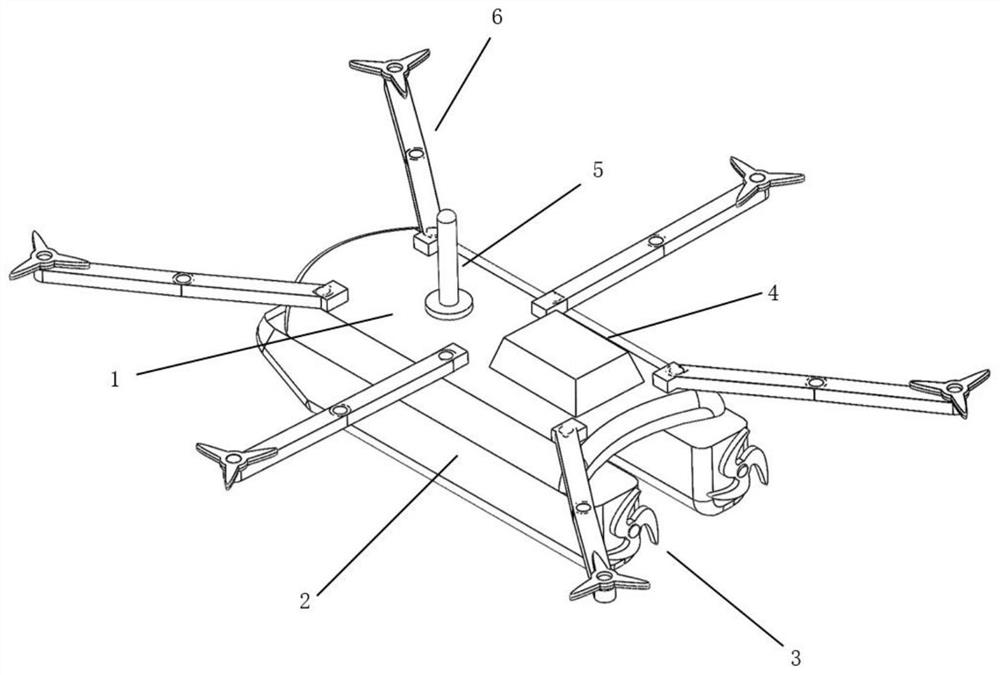
图2为本发明可跨越障碍的水空两栖无人船的立体图;
图3为本发明的旋翼结构示意图;
图4为本发明水空两栖无人船的控制方法流程图;
图5至图7为本发明模式转换模块的旋翼展开过程示意图;
图中:1、船体;2、充气浮筒;3、推进器;4、卡扣式密封箱;5、传感器底座;6、旋翼;
100、远程操控模块;101、显示屏;102、操作手柄;103、第一无线通讯模块;
200、控制模块;201、模/数转换单元;202、第二无线通讯模块;203、主控制器;
300、航行执行模块;301、推进器电机;302、直流电机驱动器;
400、感知模块;401、图像采集单元;402、GPS;403、激光雷达;404、惯性测量单元;405、气压计;
500、飞行执行模块;501、旋翼桨叶电机;502、旋翼桨叶;503、电子调速器;504、第二PWM信号发生器;
600、模式转换模块;601、内机臂舵机;602、内机臂舵角传感器;603、内机臂舵机输出轴;604、内机臂;605、外机臂舵机;606、外机臂舵角传感器;607、外机臂舵机输出轴;608、外机臂;609、第一PWM信号发生器;
700、电源模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供一种可跨越障碍的水空两栖无人船,如图1所示,包含:远程操控模块100,船体1(图1未示出),设置在船体1的感知模块400、控制模块200、航行执行模块300、飞行执行模块500、多个模式转换模块600、电源魔块。
所述感知模块400用于采集所述无人船的环境信息(无人船周围的环境图像地理位置信息、及障碍物)、航行信息(航向、航速、航行加速度)、飞行信息(飞行高度、飞行速度、飞行加速度、飞行方向)。在本实施例中,如图2所示,船体前端设有一传感器底座5,用于搭载所述感知模块400。在本实施例中,如图1所示,感知模块400用于采集包含:图像采集单元401、GPS.402、激光雷达403、惯性测量单元404、气压计405。
所述图像采集单元401可以是摄像头,用于获取无人船周围的环境图像。所述GPS.402用于获取无人船的地理位置信息。所述激光雷达403用于感知无人船周围的障碍物。所述惯性测量单元404(IMU)包含3个加速度计和3个陀螺仪,用于获取无人船的航行、飞行姿态。所述气压计405用于获取无人船的飞行高度。
如图1所示,所述控制模块200信号连接所述感知模块400、航行执行模块300、飞行执行模块500、模式转换模块600,控制模块200还无线通讯连接所述远程操控模块100;通过控制模块200无线发送所述环境信息、航行信息、飞行信息发送给所述远程操控模块100。
如图2所示,本实施例中,船体1的中后端设有一卡扣式密封箱4,所述控制模块200设置在该密封箱内。控制模块200包含:模/数转换单元201、第二无线通讯模块202、主控制器203。
所述模/数转换单元201用于转换感知模块400采集的模拟量的环境信息、航行信息、飞行信息为对应数字量的环境信息、航行信息、飞行信息。
所述第二无线通讯模块202信号连接所述模/数转换单元201、主控制器203,用于无线发送所述数字量的环境信息、航行信息、飞行信息给远程操控模块100。
所述远程操控模块100基于接收的环境信息、航行信息、飞行信息生成模式转换指令、航行控制指令、飞行控制指令,并通过第二无线通讯模块202发送主控制器203。主控制器203基于接收的模式转换指令、航行控制指令、飞行控制指令驱动模式转换模块600、航行执行模块300、飞行执行模块500工作。
所述模式转换指令包含:由飞行模式转为航行模式的模式转换指令,由航行模式转为飞行模式的模式转换指令。所述航行控制指令包含:航行方向控制指令、航行速度控制指令、开始航行控制指令、停止航行控制指令;所述飞行控制指令包含:飞行方向控制指令、飞行速度控制指令、飞行高度控制指令、开始飞行控制指令、停止飞行控制指令。
如图1所示,所述远程操控模块100包含:显示屏101、操作手柄102、第一无线通讯模块、模式切换开关(图中未示出)、调速旋钮(图中未示出)。
所述显示屏101用于可视化的显示所述环境信息、航行信息、飞行信息。
所述操作手柄102用于生成所述航行方向控制指令和飞行方向控制指令,通过操作手柄102控制船舶的航行/飞行方向。
所述模式切换开关用于生成所述模式转换指令,包含:由飞行模式转为航行模式的模式转换指令,由航行模式转为飞行模式的模式转换指令。
所述调速旋钮用于生成航行速度控制指令、飞行速度控制指令。通过逆时针、顺时针方向旋转调速旋钮,实现增加、降低无人船的航行、飞行速度。
本实施例中,远程操控模块100还包含第一按钮(图中未示出)、第二按钮(图中未示出);其中第一按钮用于发送所述开始航行控制指令、开始飞行控制指令;第二按钮用于发送所述停止航行控制指令、停止飞行控制指令。
本实施例中,远程操控模块100还包含飞行高度调节旋钮(图中未示出),用于生成所述飞行高度控制指令,通过逆时针、顺时针方向旋转飞行高度调节旋钮,实现增加、降低无人船的飞行高度。
所述第一无线通讯模块103无线通讯连接第二无线通讯模块202,用于实现远程操控模块100与控制模块200之间的双向数据传输。
所述航行执行模块300基于控制模块200发送的航行控制指令,控制无人船的航行姿态。如图2所示,船体两侧对称的设有两个充气浮筒2,浮筒末端设有一推进器3(螺旋桨)。如图1所示,所述航行执行模块300包含:两个推进器电机300、直流电机驱动器302。
所述两个推进器电机300分别对应两个螺旋桨;推进器电机300的输出端传动连接对应的螺旋桨。
所述直流电机驱动器302电性连接在主控制器203与推进器电机300的控制端之间。直流电机驱动器302接收主控制器203发出的航行控制指令,控制两个推进器电机300的转速及转速差,实现控制无人船的航速及航向。
所述模式转换模块600基于控制模块200发送的模式转换指令实现无人船进行飞行模式与航行模式的转换。如图2、图3所示,所述模式转换模块600包含:多个旋翼6、第一PWM信号发生器609。所述旋翼6包含:内机臂604、外机臂608、内机臂舵机601、外机臂舵机、内机臂舵角传感器602、外机臂舵角传感器606。
如图3所示,所述内机臂舵机601固定设置在船体1,内机臂第一端固定连接内机臂舵机输出端(内机臂舵机输出轴603);所述外机臂舵机605固定设置在内机臂第二端,外机臂第一端固定连接外机臂舵机输出端(外机臂舵机输出轴607)。内机臂604带动外机臂608一同绕内机臂舵机输出轴603旋转,另一方面,外机臂608还单独绕外机臂舵机输出轴607旋转。
内机臂舵机控制端、外机臂舵机控制端通过第一PWM信号发生器609连接主控制器203;第一PWM信号发生器609根据主控制器203发送的模式转换指令生成对应的PWM信号,驱动内机臂604、外机臂舵机605正转或反转,实现内机臂604、外机臂608打开或闭合。
如图1所示,所述内机臂舵角传感器602连接设置在内机臂舵机输出端与主控制器203之间,用于检测内机臂舵机输出端的转动角度,并生成对应的第一角度检测信号。所述外机臂舵角传感器606连接设置在外机臂舵机输出端与主控制器203之间,用于检测外机臂舵机输出端的转动角度,并生成对应的第二角度检测信号。本实施例中,第一、第二角度检测信号可以是电压信号。
主控制器203基于第一角度检测信号、第二角度检测信号生成内机臂舵机停止指令、外机臂舵机停止指令(此时内机臂604、外机臂608已经旋转设定的角度);第一PWM信号发生器609根据内、外机臂舵机停止指令生成对应的PWM信号,驱动内机臂604、外机臂舵机605停止工作。
所述飞行执行模块500基于控制模块200发送的飞行控制指令,控制无人船的飞行姿态。
本实施例中,所述飞行执行模块500包含:多个旋翼桨叶电机501、多个旋翼桨叶502、电子调速器503、第二PWM信号发生器504;
如图2所示,所述旋翼桨叶电机501、旋翼桨叶502设置在对应外机臂608的第二端,一个外机臂608对应一个旋翼桨叶电机501、一个旋翼桨叶502;旋翼桨叶电机501的输出端传动连接对应旋翼桨叶502。
如图1所示,主控制器203依序通过第二PWM信号发生器504、电子调速器503连接旋翼桨叶电机控制端。所述第二PWM信号发生器504其根据主控制器203发送的飞行控制指令生成对应的PWM信号,电子调速器503根据接收的PWM信号控制旋翼桨叶电机501工作,例如控制旋翼桨叶电机501的转速。
如图1所示,所述电源魔块用于为航行执行模块300、飞行执行模块500、模式转换模块600供电提供工作电能。
本发明还提供一种水空两栖无人船的控制方法,采用本发明所述的水空两栖无人船实现的,如图4所示,包含步骤:
S1、将两栖无人船放入水中,初始化并自检各模块;自检合格,进入S2;
所述自检各模块包含:
检查内机臂604、外机臂608能否展开设定角度并恢复初始状态;
检查推进器电机300是否能够正常工作;
检查远程遥控模块是否能够获取感知模块400采集的环境信息。
S2、通过远程操控模块100获取无人船周围的图像信息,当判断无人船无法绕过前方障碍,通过远程操控模块100发送指示无人船开始航行的航行控制指令,航行执行模块300驱动无人船航行;否则,进入S3;
S3、通过远程操控模块100发送指示无人船停止航行的航行控制指令,航行执行模块300停止工作,无人船停止航行;通过远程操控模块100发送由航行模式转为飞行模式的模式转换指令,模式转换模块600的内机臂604、外机臂608旋转展开设定的角度;如图5至图7所示,本实施例中,旋翼6展开时,先打开内机臂604,待内机臂604旋转设定角度,再打开外机臂608。
S4、通过远程操控模块100发送指示无人船开始飞行的飞行控制指令,旋翼桨叶502旋转,两栖无人船进入飞行状态;通过远程操控模块100遥控无人船飞行至无障碍水域,缓降飞行高度;待无人船停稳在水面时,通过远程操控模块100发送指示无人船停止飞行的飞行控制指令,旋翼桨叶502停止旋转;
S5、通过远程操控模块100发送由飞行模式转为航行模式的模式转换指令,内机臂604、外机臂608旋转收回至初始位置(先收外机臂608、再收内机臂604);重复步骤S2至S5。
本发明的可跨越障碍的水空两栖无人船及控制方法,解决了目前无人船在航行过程中会遇到各种难以跨越的障碍,无法工作在复杂水域的问题。在正常水域,本发明的水空两栖无人船为航行状态;在复杂水域,当水空两栖无人船无法航行通过时,其转换为飞行状态,并飞行至合适水域再降落。本发明的水空两栖无人船能够满足复杂水域的工作需求,无需通过人工搬运至水况良好的地方,从而提高了水空两栖无人船的持续工作能力和工作效率。
本发明中,工作人员基于水空两栖无人船上的感知模块400,实时获取水空两栖无人船周围的环境信息,通过无线遥控的方式控制水空两栖无人船在各状态之间变换,并能够通过感知模块400实时获取水空两栖无人船的航速、航向、飞行高度、飞行姿态,保障了水空两栖无人船的工作安全;本发明的水空两栖无人船易于进行控制操作,控制精度高。
本发明的水空两栖无人船采用模块化设计,各个模块易于维护、更换,便于后期改造升级。本发明的各个模块外部均设有防水层,各个连接处采用防水密封圈加防水胶处理,具有很好的防水性能,使用寿命高。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。