一种基于改进神经图灵机的频率相关迟滞建模方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于微纳米科学与技术领域中的压电驱动技术,主要涉及一种基于神经图灵机的频率相关迟滞建模方法。
背景技术
压电驱动器(piezoelectric actuator,PEA)作为一种精密的运动工作台,在微纳成像和操作设备中得到了广泛的应用[1-2],如原子力显微镜[3-4],微操作机器人[5-6]等。与其他驱动器相比,压电驱动器具有位移分辨率高、功耗低、响应快、无摩擦和热稳定性高等优点,这使得它在许多微纳尺度的研究中是不可缺少的[7]。
然而,压电驱动器固有的铁电效应不可避免地会引起迟滞现象,影响定位精度[8]。更具体的说,迟滞表现为一种复杂的现象,结合着非线性[9],频率相关性[10]和记忆特性[11],导致输出位移和输入电压之间存在着复杂的非线性。频率相关性表明,随着输入电压频率的增加,迟滞现象更加明显。记忆特性使得压电驱动器的输出位移不仅与当前时刻的输入电压有关,而且与之前时刻的电压变化也相关。频率相关性和记忆特性进一步加剧了非线性的复杂性,使得通过建模和识别来表征迟滞更加困难。
为了消除迟滞对压电驱动器定位精度的影响,研究人员提出了各种建模方法来模拟迟滞。根据建模原理的不同,迟滞模型分为基于物理特性的模型和数据驱动的模型。考虑到迟滞的基本物理性质[12],建立了基于物理特性的模型,包括Duhem模型[13],Jiles-Atherton模型[14],Maxwell模型[15]等经典模型。相反,数据驱动模型是基于压电驱动器的实测数据来描述迟滞,而不考虑物理机制[16],典型的数据驱动迟滞模型包括Bouc-wen模型[17],Preisach模型[18],Prandtl-Ishlinskii模型[19,20],Krasnoselskii-Pokrovskii模型[21],模糊模型[22],神经网络模型[23,24]。此外,除了上述经典模型,在最新文献[9,25-27]中也发表了许多改进后的复合模型。
尽管上述发表的模型能够准确模拟迟滞效应,但由于泛化能力有限,不太适合模拟由其他未经训练的数据产生的迟滞。从这个角度出发,建立一个能够全面描述迟滞特性的模型,从而在保证较高建模精度的同时提高模型的适用性是值得努力的。
发明内容
本发明的目的是解决压电驱动器复杂迟滞特性导致的建模难题,提供一种基于改进神经图灵机的频率相关迟滞建模方法。
神经图灵机(NTM)具有很强的存储记忆和描述非线性的能力[28]。一个典型的神经图灵机由控制器和内存模块组成,控制器通过读写操作与内存矩阵进行交互[29],该控制器可以通过神经网络实现,从而可以模拟迟滞非线性和频率相关性,内存模块能够通过一组并行读写磁头储存和释放信息,能够描述迟滞记忆性的特征。
基于此,本发明尝试建立一种改进的神经图灵机模型,该模型能够同时模拟迟滞的非线性、频率依赖性和记忆特性。具体地说,改进后的神经图灵机的控制器构造为一个频率模块和一个非线性模块,频率模块通过建立一个反向传播神经网络(BPNN)来模拟迟滞的频率依赖性。此外,通过将极限学习机(ELM)与精心设计的反向传播神经网络串联起来构建非线性模块,以较少的训练即可准确建模迟滞非线性。此外,神经图灵机的内存模块用来存储前一时刻的电压和位移,经过计算后由非线性模块读取,从而将记忆特性引入到所提出的迟滞模型中。通过集成上述模块进行协同工作,所设计的神经图灵机不仅能更准确地模拟迟滞,而且对不同频率下的迟滞效应具有更强的适用性。
本发明提出的基于改进神经图灵机的频率相关迟滞建模方法,具体步骤包括:
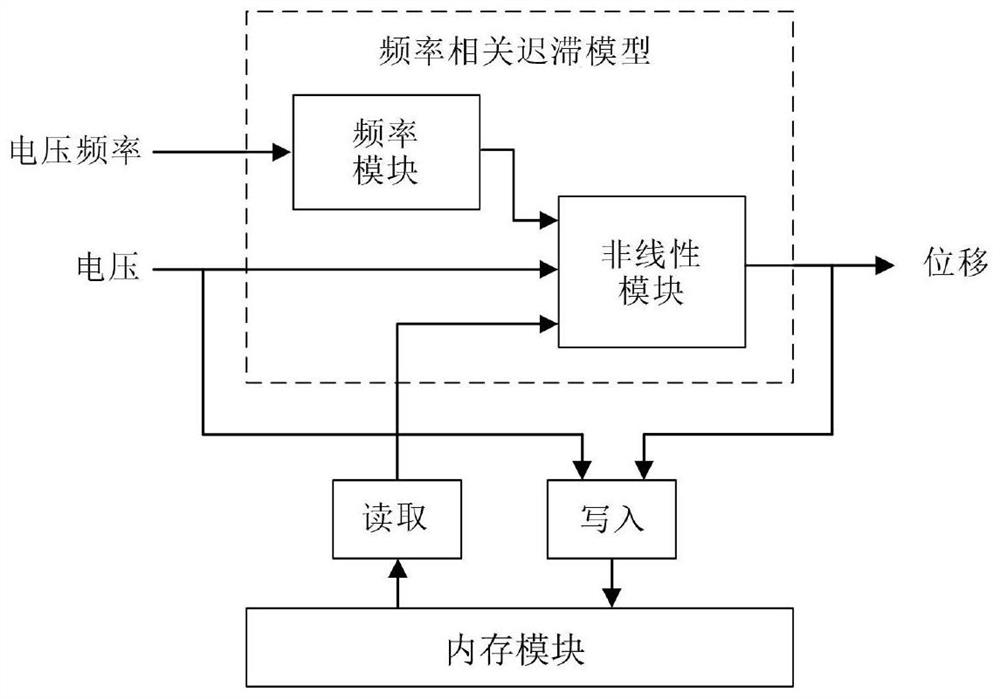
第1、迟滞模型的结构设计:所提出的迟滞模型由频率模块、非线性模块和内存模块组成;参照神经图灵机的框架,频率模块和非线性模块由神经网络实现,通过读写操作与内存模块交互;频率模块用于模拟输入电压频率与频率对应的迟滞回线面积之间的关系,从而引入频率相关性;对于非线性模块,除了输入迟滞回线面积和当前电压,另一个输入是在当前时刻内存模块输出的计算结果,用于准确模拟迟滞非线性;内存模块采用线性加权和非线性激活的方法计算之前时刻存储的电压和位移,得到的输出由非线性模块读取,由此引入记忆特性。
第2、频率模块的建模与辨识:根据定性分析,迟滞回线面积与频率呈正相关,建立其具体关系从而定量模拟频率相关性是可行的,但由于迟滞回线面积与频率的关系过于复杂,难以用数学函数来描述频率相关关系。幸运的是,带隐含层的神经网络能够模拟复杂的非线性,而不需要具体的数学表达式[30],因此,可以通过精心构造的神经网络来精确表征频率相关。根据频率模块单输入单输出的特点,建立含有单隐含层的反向传播神经网络,从而将频率相关性引入到所述迟滞模型中,其中输入节点对应电压频率,输出节点为频率相对应的迟滞回线面积;构造由不同频率下的输入电压和迟滞面积组成的训练数据集,确定反向传播神经网络中的权重和阈值;
第3、非线性模块的建模与辨识:根据非线性模块多输入单输出系的特点,单独采用反向传播神经网络结构需要大量的训练时间来保证建模精度;极限学习机是一种改进的反向传播神经网络,极限学习机隐含层的参数随机或人为给定,只需通过模型训练计算出输出权值[31,32];然而,由于其模型参数不是通过迭代训练得到的,难以达到期望的高精度,因此,结合极限学习机和反向传播神经网络各自的优点,设计了一种新的神经网络结构,由一个极限学习机和一个带有单隐含层的反向传播神经网络串联而成,在保证建模精度的同时,缩短了模型训练的时间;极限学习机隐含层的参数随机或人为给定,通过模型训练计算出输出权值,完成极限学习机的参数辨识后,得到的输出再输入到反向传播神经网络中,通过训练产生反向传播神经网络的权重和阈值,生成非线性模块的最终输出。
第4、内存模块的结构设计:内存模块包括存储器和并行的读写头;通过写操作存储之前时刻的输入电压和输出位移,由两个存储器储存,从而构造一个电压序列存储器和一个位移序列存储器;在这两个存储器的基础上,考虑之前电压变化对当前输出位移的影响,采用线性加权和非线性激活的方法产生内存模块的输出,然后被非线性模块读取,从而将记忆特性引入所提出的迟滞模型中。
本发明的有益效果是:
1、本发明采用极限学习机和反向传播神经网络的复合结构,构建了改进的神经图灵机,既能够准确模拟迟滞非线性,又极大减少了模型训练的时间,从而达到了功能性和低耗时的平衡;
2、本发明建立了基于改进的神经图灵机的迟滞模型,包含频率模块、非线性模块和内存模块三个模块,能准确模拟迟滞且具有简单而有效的模型参数;
3、本发明所提出的迟滞模型具有较强的泛化能力,可以应用于模拟其他未经训练的数据产生的迟滞效应。
附图说明:
图1是本发明所提出的模型的结构图;
图2是在不同频率下测得的迟滞回线;
图3是频率模块的反向传播神经网络的结构图;
图4是本发明所设计的非线性模块的结构图;
图5是本发明所设计的内存模块的结构图;
图6是通过模型训练建立的迟滞模型输出位移和误差;其中,(a)为不同频率下,本发明所建立模型的输出位移、Preisach模型的输出位移与测得的输出位移的对比图,(b)为所建立模型的输出位移与测量值的相对误差的、Preisach模型输出位移与测量值的相对误差的对比图;
图7是通过模型训练建立的,各电压频率下的所提模型和Preisach模型的迟滞回线;
图8是通过模型测试建立的迟滞模型输出位移和误差;其中,(a)为不同频率下,本发明所建立模型的输出位移、Preisach模型的输出位移与测得的输出位移的对比图,(b)为所建立模型的输出位移与测量值的相对误差的、Preisach模型输出位移与测量值的相对误差的对比图;
图9是通过模型测试建立的,各电压频率下的所提模型和Preisach模型的滞回线。
具体实施方式
实验使用的计算机配置为Intel(R)Core(TM)i5-42101.70GHz,内存为4GB。使用本原公司提供的x-y-z方向运动范围为20μm×20μm×4μm的单管压电驱动器,输出位移由ADETechnologies提供的电容式传感器测量,带宽为10kHz,分辨率为亚纳米级。电容传感器包括一个测量头,一个测量单元,一个支架和一个校准块。校准块固定在压电驱动器上,以反映其位移,由测量头检测并由测量单元记录。利用本发明所提出的方法建立迟滞模型。
为证明所述模型的性能,利用所采用的压电驱动器的多组实测数据来训练模型,从而确定模型参数;此外,建立了已被广泛使用的Preisach模型,利用相同的训练数据进行对比实验,更加有力地验证了所述模型的性能;由于Preisach模型是频率无关的,需要对不同频率下的数据重复进行参数识别,因此,由这10组不同频率的训练数据,在模型训练过程中得到了10个具有不同参数的Preisach模型;相反,本发明设计的模型具有频率相关的优点,训练后的模型只有一组特定的参数;在完成模型训练后,进行模型测试,以验证训练后的模型对其他未训练数据的适用性。
实施例1
基于改进的神经图灵机的频率相关迟滞建模方法,该方法构建的模型结构如图1所示,具体构建步骤包括:
第1、迟滞模型的结构设计:
所提出的迟滞模型由频率模块、非线性模块和内存模块组成;参照神经图灵机的框架,频率模块和非线性模块由神经网络实现,通过读写操作与内存模块交互;频率模块用于模拟输入电压频率与频率对应的迟滞回线面积之间的关系,从而引入频率相关性;对于非线性模块,除了输入迟滞回线面积和当前电压,另一个输入是当前时刻内存模块输出的计算结果,用于准确模拟迟滞非线性;内存模块采用线性加权和非线性激活的方法计算之前时刻存储的电压和位移,得到的输出由非线性模块读取,由此引入记忆特性。
第2、频率模块的建模与辨识:
当输入电压的频率在一定范围内增加时,迟滞现象更加明显。图2给出了在不同频率下测量的电压和位移之间的多个迟滞回线,其中图2(a)-(j)分别对应的频率范围为{5Hz,15Hz,25Hz,…,95Hz}。根据频率模块单输入单输出的特点,建立含有单隐含层的反向传播神经网络,如图3所示,其中输入节点对应电压频率,输出节点为频率相对应的迟滞回线面积;构造由不同频率下的输入电压和迟滞面积组成的训练数据集,确定反向传播神经网络中的参数,训练结果如图7所示,(a)-(j)分别为不同频率下的迟滞回线,可以看出,所述模型能够更准确地模拟频率相关的迟滞效应;在完成模型训练后,进行模型测试,以验证训练后的模型对其他未训练数据的适用性,测试结果如图9所示,可以看出,由于Preisach模型是频率无关的,所以不同频率下的迟滞回线基本相同,与实际测量值存在差异,不适合模拟未经训练的迟滞数据。相反,所提出的模型所产生的迟滞回线仍然与实际的迟滞回线较为接近,这进一步证明了所提出的模型具有很强的适用性。
第3、非线性模块的建模与辨识:
根据非线性模块多输入单输出系的特点,设计了一种新的神经网络结构,如图4所示,由一个极限学习机和一个带有单隐含层的反向传播神经网络串联而成,极限学习机隐含层的参数随机或人为给定,只需通过模型训练计算出输出权值,完成极限学习机的参数辨识后,再将得到的输出即输入到反向传播神经网络中,通过模型训练确定反向传播神经网络的参数,结合极限学习机和反向传播神经网络二者的优点,保证建模的精度和较短的模型训练时间;
模型训练结果如图6(a),所述模型的训练时间为3.67秒,远小于Preisach模型的58.50秒,从图中可以看出,与Preisach模型相比,所述模型的输出位移与实测位移更接近,且训练时间更短,说明所述模型的性能更好。分别计算Preisach模型与所述模型生成的位移与测量值的相对误差绝对值,结果如图6(b)所示,所述模型的相对误差绝对值最大值为0.43%,小于Preisach模型的0.94%,相对误差绝对值平均值为0.10%,也小于Preisach模型的0.23%,进一步证明了该方法比Preisach模型具有更高的建模精度。
完成模型训练后,进行模型测试,选取频率为5Hz的实测数据训练的Preisach模型进行对比实验。图8(a)中给出测试结果,由于Preisach模型不包含电压的频率信息,导致输出位移与测量值之间存在明显偏差,而所述模型由于具有频率相关性和存储能力,其生成的输出位移仍然能够接近测量值。计算测试结果的模型误差,结果如图8(b)所示,所述模型的相对误差绝对值最大值为5.55%,相对误差的绝对值平均值为0.56%。Preisach模型的相对误差绝对值最大值为74.82%,相对误差绝对值平均值为23.50%,比所述模型的误差大得多。因此,测试结果验证了所述模型可以应用于不同于训练集的新数据,说明所述方法具有较强的泛化能力。
第4、内存模块的结构设计:
内存模块的结构如图5所示,包括存储器和并行的读写头;内存模块需要通过写操作存储之前时刻的输入电压和输出位移,由两个存储器储存,因而构造一个电压序列存储器和一个位移序列存储器;在这两个存储器的基础上,考虑之前电压变化对当前输出位移的影响,采用线性加权和非线性激活的方法产生内存模块的输出,然后被非线性模块读取,从而将记忆特性引入所提出的迟滞模型。
参考文献
[1]Cheng L,Liu W,Hou Z,etal.Neural-Network-Based Nonlinear ModelPredictive Control for Piezoelectric Actuators[J].IEEE Transactions onIndustrial Electronics,2015,62(12):7717–7727.
[2]Wu Y,Zou Q.Iterative Control Approach to Compensate for Both theHysteresis and the Dynamics Effects ofPiezo Actuators.IEEE Transactions onControl Systems Technology,2007,15(5):936–944.
[3]Fleming A J,Yong Y K.An Ultrathin Monolithic XY NanopositioningStage Constructed From a Single Sheet ofPiezoelectric Material.IEEE/ASMETransactions on Mechatronics,2017,22(6):2611–2618.
[4]Li M,Xi N,Wang Y,Liu L.Atomic Force Microscopy in Probing TumorPhysics for Nanomedicine.IEEE Transactions on Nanotechnology,2019,18:83–113.
[5]Hariri H H,Soh G S,Foong S,Wood K.Locomotion Study of a StandingWave Driven Piezoelectric Miniature Robot for Bi-Directional Motion.IEEETransactions on Robotics,2017,33(3):742–747.
[6]Gao X,Zhang S,Deng J,Liu Y.Development of a Small Two-DimensionalRobotic Spherical Joint Using a Bonded-Type Piezoelectric Actuator.IEEETransactions on Industrial Electronics,2019.
[7]Rakotondrabe M,Ivan I A,Khadraoui S,Lutz P,Chaillet N.SimultaneousDisplacement/Force Self-Sensing in Piezo-electric Actuators and Applicationsto Robust Control.IEEE/ASME Transactions on Mechatronics,2015,20(2):519–531.
[8]Yun S,Ham Y B,Kim C Y,Park J H.Hysteresis Nonlinearity Compensatorfor Piezoelectric Actuator.Journal ofElectroceramics,2006,17(2–4):573–576.
[9]Mansour S Z,Seethaler R.Displacement and Force Self-SensingTechnique for Piezoelectric Actuators Using a Nonlinear ConstitutiveModel.IEEE Transactions on Industrial Electronics,2019,66(11):8610–8617.
[10]Malczyk R,Izydorczyk J.The Frequency-Dependent Jiles-AthertonHysteresis Model.Physica B:Condensed Matter,2015,463:68–75.
[11]Biggio M,Butcher M,Giustiniani A,Masi A,Storace M.MemoryCharacteristics of Hysteresis and Creep in Multi-Layer PiezoelectricActuators:An Experimental Analysis.Physica B Condensed Matter,2014,435:40–43.
[12]Tao Y,Li H,Zhu L.Rate-Dependent Hysteresis Modeling andCompensation of Piezoelectric Actuators Using Gaussian Process.Sensors andActuators A:Physical,2019,295:357–365.
[13]Oh J,Bernstein D S.Piecewise Linear Identification for the Rate-Independent and Rate-Dependent Duhem Hysteresis Models.IEEE Transactions onAutomatic Control,2007,52(3):576–582.
[14]Zhang D,Jia M,Liu Y,Ren Z,Koh C.Comprehensive Improvement ofTemperature-Dependent Jiles-Atherton Model Utilizing Variable ModelParameters.IEEE Transactions on Magnetics,2018,54(3):1–4.
[15]Liu Y,Du D,Qi N,Zhao J.A Distributed Parameter Maxwell-Slip Modelfor the Hysteresis in Piezoelectric Actuators.IEEE Transactions on IndustrialElectronics,2019,66(9):7150–7158.
[16]Sabarianand D V,Karthikeyan P,Muthuramalingam T.A Review onControl Strategies for Compensation of Hysteresis and Creep on PiezoelectricActuators Based Micro Systems.Mechanical Systems and Signal Processing,2020,140:106634.
[17]Rakotondrabe M.Bouc-Wen Modeling and Inverse MultiplicativeStructure to Compensate Hysteresis Nonlinearity in PiezoelectricActuators.IEEE Transactions on Automation Science and Engineering,2011,8(2):428–431.
[18]Li Z,Shan J,Gabbert U.Development of Reduced Preisach Model UsingDiscrete Empirical Interpolation Method.IEEE Transactions on IndustrialElectronics,2018,65(10):8072–8079.
[19]Janaideh M Al,Rakheja S,Su C.An Analytical Generalized Prandtl-Ishlinskii Model Inversion for Hysteresis Com-pensation in MicropositioningControl.IEEE/ASME Transactions on Mechatronics,2011,16(4):734–744.
[20]Alatawneh N,Janaideh M Al.A Frequency-Dependent Prandtl-Ishlinskii Model of Hysteresis Loop Under Rotating Magnetic Fields.IEEETransactions on Power Delivery,2019,34(6):2263–2265.
[21]Li Z,Shan J,Gabbert U.Inverse Compensation of Hysteresis UsingKrasnoselskii-Pokrovskii Model.IEEE/ASME Transactions on Mechatronics,2018,23(2):966–971.
[22]Cheng L,Liu W,Hou Z,Huang T,Yu J,Tan M.An Adaptive Takagi-SugenoFuzzy Model-Based Predictive Controller for Piezoelectric Actuators.IEEETransactions on Industrial Electronics,2017,64(4):3048–3058.
[23]Dang X,Tan Y.RBF Neural Networks Hysteresis Modelling forPiezoceramic Actuator Using Hybrid Model.Mechan-ical Systems and SignalProcessing,2007,21(1):430–440.
[24]Liu W,Cheng L,Hou Z,Yu J,Tan M.An Inversion-Free PredictiveController for Piezoelectric Actuators Based on a Dynamic Linearized NeuralNetwork Model.IEEE/ASME Transactions on Mechatronics,2016,21(1):214–226.
[25]Xu Y,Li X,Yang X,Yang Z,Wu L,Chen Q.A Two-Stage Model for Rate-Dependent Inverse Hysteresis in Reluctance Actuators.Mechanical Systems andSignal Processing,2020,135:106427.
[26]Lallart M,Li K,Yang Z,Wang W.System-Level Modeling of NonlinearHysteretic Piezoelectric Actuators in Quasi-Static Operations.MechanicalSystems and Signal Processing,2019,116:985–996.
[27]Wang G,Chen G.Identification of Piezoelectric Hysteresis by aNovel Duhem Model Based Neural Network.Sensors and Actuators A:Physical,2017,264:282–288.
[28]Graves A,Wayne G,Danihelka I.Neural Turing Machines.ComputerScience,2014.
[29]Gulcehre C,Chandar S,Cho K,Bengio Y.Dynamic Neural Turing Machinewith Continuous and Discrete Addressing Schemes.Neural Computation,2018,30(4):857–884.
[30]Rahimilarki R,Gao Z,Zhang A,Binns R.Robust Neural Network FaultEstimation Approach for Nonlinear Dynamic Systems With Applications to WindTurbine Systems.IEEE Transactions on Industrial Informatics,2019,15(12):6302–6312.
[31]Huang G B,Zhu Q Y,Siew C K.Extreme Learning Machine:Theory andApplications.Neurocomputing,2006,70(1–3):489–501.
[32]Yao L,Ge Z.Deep Learning of Semisupervised Process Data WithHierarchical Extreme Learning Machine and Soft Sensor Application.IEEETransactions on Industrial Electronics,2018,65(2):1490–1498.
- 一种基于改进神经图灵机的频率相关迟滞建模方法
- 基于神经网络的压电驱动器的动态迟滞建模方法