一种桌面级机械臂平行夹装置
文献发布时间:2023-06-19 19:40:14
技术领域
本发明涉及机械臂夹取装置技术领域,主要适用于桌面级机械臂的平行夹取技术。
背景技术
现有技术中,对物件的夹持,机械手往往采用步进或伺服电机驱动丝杆配合导轨结构,这种方式存在电机驱动线路与机械结构复杂,成本高,体积重量大,不能安装于桌面级机械臂,无法在狭小空间作业的问题。目前,被广泛应用于桌面机械臂的夹持结构主要包括气动手指和机械抓夹。
(1)气动手指
常见方案中使用气动部件模拟手指动作,是通过气体的压强或膨胀产生的力来驱动的,即将压缩空气的弹性能量转换为动能的机件;运用气动手指的时候我们发现气动手指的运行速度很快,但是由于空气有压缩性,气缸的动作速度易受负载的变化而变化并且气动手指在低速运动时候,由于摩擦力占推力的比例较大所以想要保持一定的稳定性有些难度,并且,小型化的气缸驱动的夹持结构后端需要有气源,气管配合,用于实现无限位旋转的电气滑环寿命有限,其成本高,结构仍旧复杂。
(2)机械抓夹
传统桌面机械臂使用的舵机,齿轮,连杆结构机械爪,实现平行夹取动作需要夹持机构夹取+机械臂轻微后移,这降低了夹取精度,也增加了应用编程的复杂性。
发明内容
本发明的目的在于,为了解决现有技术中模拟人指器械在运用过程中存在的不稳定性问题,本发明提供一种桌面级机械臂平行夹装置,其采用两指的平行夹结构,动力来源为外界电机,电机转动的同时通过内部连杆结构带动手指的收缩,以达到稳定夹持的效果;将光轴轴套结构应用于微型设备,消除了垂直方向的抖动位移,进一步提升夹持的稳定性与动作的精确性;结构精巧、制作成本低、动作精度高、控制简单便利。
本发明所提供的一种桌面级机械臂平行夹装置,包括:安装架、第一光轴、第二光轴、第一机械手指、第二机械手指、主轴连杆、连接杆;
所述第一光轴与所述第二光轴上下布置,平行设置于所述安装架中;
所述第一机械手指与所述第二机械手指左右布置,第一机械手指、第二机械手指上均开设有第一光轴连接孔、第二光轴连接孔,所述第一光轴连接孔中、所述第二光轴连接孔中均设置有轴套,第一机械手指、第二机械手指均通过所述轴套与第一光轴、第二光轴滑动连接;
所述主轴连杆设置于安装架中,安装架上开设有驱动机构执行端连接孔,主轴连杆经所述驱动装置执行端连接孔与驱动机构执行端连接;
所述连接杆包括:第一连接杆、第二连接杆;所述第一连杆将第一机械手指与主轴连杆连接,所述第二连接杆将第二机械手指与主轴连杆连接;
第一机械手指与第二机械手指沿第一光轴、第二光轴长度方向同步相向或同步背向移动,间距可调。
对上述基础结构记性优选的技术方案为,所述第一连接杆、所述主轴连杆、所述第二连接杆三者连接后形成Z字型结构。
进一步优选的技术方案为,所述主轴连杆包括:前主轴连杆、后主轴连杆;所述第一连接杆包括:第一前连接杆、第一后连接杆;所述第二连接杆包括:第二前连接杆、第二后连接杆;
所述前主轴连杆中部的后侧呈椭圆柱状结构,所述椭圆柱状结构的高度大于所述第一光轴、所述第二光轴的外径,椭圆柱状结构的长轴外径小于第一光轴与第二光轴的间距;
所述后主轴连杆的中部后侧为驱动机构连接端,后主轴连杆通过所述驱动机构连接端经所述安装架上的驱动装置执行端连接孔与驱动机构执行端连接;
前主轴连杆与后主轴连杆分别位于第一光轴及第二光轴的前、后两侧,前主轴连杆中部与后主轴连杆中部锁紧连接,前主轴连杆中部的圆柱状结构处于第一光轴与第二光轴之间;
前主轴连杆及后主轴连杆均具有向两侧延伸的展翼式结构;
第一前连接杆、第二前连接杆均位于第一光轴及第二光轴的前侧,第一后连接杆、第二后连接杆均位于第一光轴及第二光轴的后侧,所述第一机械手指前侧通过第一前连接杆与前主轴连杆展翼式结构的端部连接,第一机械手指后侧通过第一后连接杆与后主轴连杆展翼式结构的端部连接,所述第二机械手指前侧通过第二前连接杆与前主轴连杆的另一展翼式结构的端部连接,第二机械手指后侧通过第二后连接杆与后主轴连杆的另一展翼式结构的端部连接。
再进一步优选的技术方案为,所述第一连接杆与所述第二连接杆结构一致,所述主轴连杆为左右对称的结构。
更进一步优选的技术方案为,所述安装架包括:前卡位板、后卡位板、顶板;
所述前卡位板的左右两侧、所述后卡位板的左右两侧均设置有光轴夹持结构,前卡位板、所述顶板、后卡位板之间通过可拆方式连接。
又进一步优选的技术方案为,所述光轴夹持结构为:
所述前卡位板的左右两侧设置有朝向所述后卡位板方向延伸的第一定位板;
后卡位板的左右两侧设置有朝向前卡位板方向延伸的第二定位板;
所述第一定位板上于第一光轴端部及第二光轴端部相应位置处、所述第二定位板上于第一光轴端部及第二光轴端部相应位置处,均开设有夹持槽,所述夹持槽呈弧形结构,所述弧形结构的深度小于第一光轴、第二光轴的半径,弧形结构的弧度大于第一光轴、第二光轴的弧度。
对上述方案做出改进的技术方案为,还包括:动平衡配重块;所述动平衡配重块设置于所述安装架上。
再又进一步优选的技术方案为,所述主轴连杆经所述安装架上的所述驱动装置执行端连接孔与反馈舵机执行端连接。
更加优选的技术方案为,所述第一机械手指的指端与所述第二机械手指的指端所构成的区域呈凹槽式结构。
本发明的有益效果在于:
1.鉴于以上两种模拟人指器械的不稳定性,本发明提供了一种桌面级机械臂平行夹装置,其采用两指的平行夹结构。由于平行夹的动力来源主要是外界电机的转动,通过内部的连杆结构,从而带动手指的收缩,所以可以达到稳定夹持的效果;内部的连杆结构主要采取的方法是:两指首先通过轴套与光轴相连接,然后通过连接杆固定上两指之间的位置关系,最后通过转动连接杆来调整两指的对中夹持的间距。将光轴轴套结构应用于微型设备,消除了垂直方向的抖动位移,提升了夹持的稳定性与动作的精确性。该方案不仅转速十分理想,而且稳定度得到了大幅度提高,同时本装置小巧,方便携带,与气动手指、齿轮连杆结构的机械抓夹电机相比具有结构精巧、制作成本低、动作精度高、控制简单便利的优势,适合于各类轻型机器人的两指结构的需要。
2.与气动手指相比,本发明不需要压缩气体,操作流程更加简单,在保持速度的同时,提高了稳定性。
3.本发明所提供的桌面级机械臂平行夹装置,不需要机械臂后移配合就能够直接实现平行夹取,夹取精度高,控制简单便利;通过电机驱动主轴连杆转动,经连接杆带动机械手指开合,装置整体稳定性高。与机械夹爪相比,在保证速度的同时,消除了机械夹爪的法向影响,大幅度降低了摩擦对夹持对象法向位移的影响,提高了稳定性。
4.本设计使用微型光轴与轴套配合确保运动精度,使用反馈舵机与连杆简化了驱动结构,从而降低了成本,体积,重量,使之得以应用于桌面级机械臂。
5.当本装置增加动平衡配重时,能够减少高速转动时的抖动,进一步增强转动稳定性。
6.采用高速反馈舵机驱动,具有重量轻,结构简单,易于使用的特点。
7.本发明所提供的桌面级机械臂平行夹装置,可以用于需要高速旋转、夹持中点固定、对夹持稳定度有较高要求的机械臂应用场合。
8.本发明采用多连杆结构设计从而实现夹持中点固定,内部采用对称连杆提升了结构强度,实现了平衡驱动。
附图说明
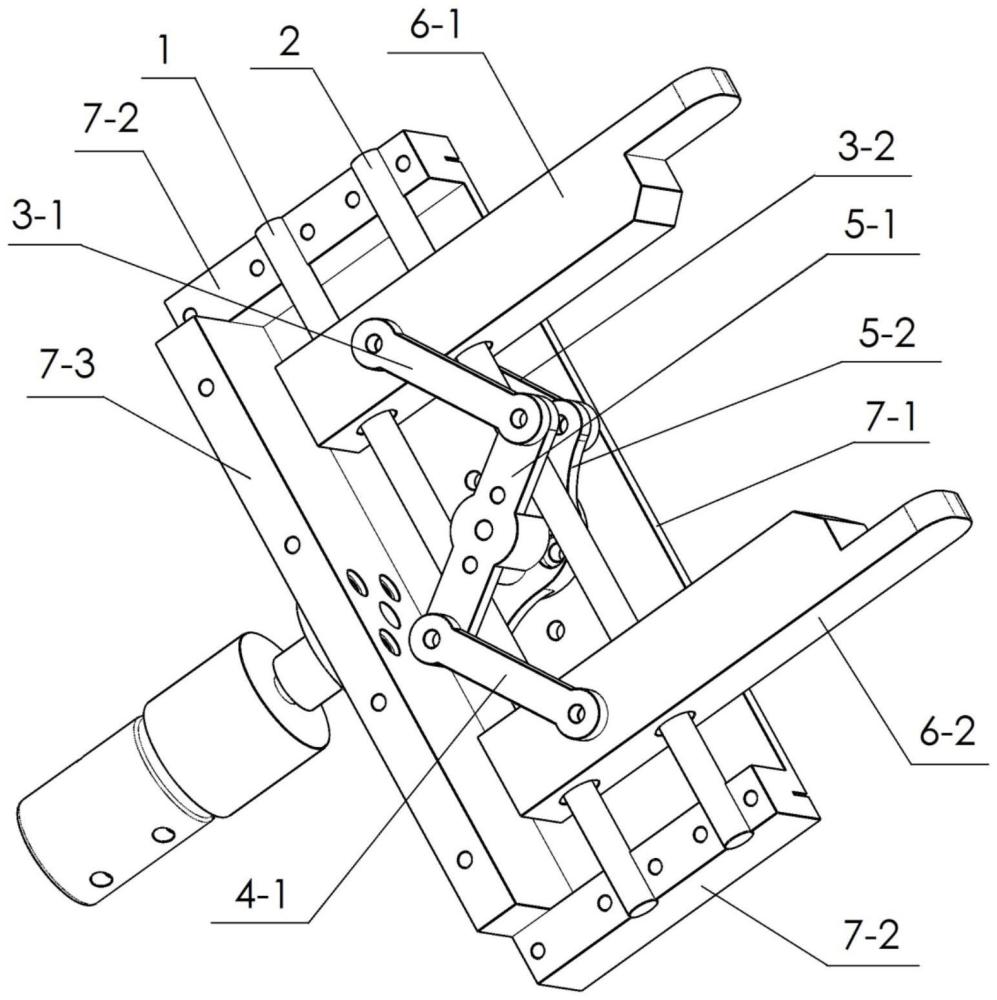
图1为本发明实施例的结构示意图。
图2为图1所示结构的后侧结构示意图。
图3为本发明实施例中采用的光轴结构示意图。
图4为本发明实施例中采用的连接杆结构示意图。
图5为本发明实施例中采用的后卡位板结构示意图。
图6为本发明实施例中采用的前主轴连杆结构示意图。
图7为本发明实施例中采用的后主轴连杆结构示意图。
图8为本发明实施例中采用的机械手指结构示意图。
其中,1—第一光轴,2—第二光轴,3-1—第一前连接杆,3-2—第一后连接杆,4-1—第二前连接杆,5-1—前主轴连杆,5-2—后主轴连杆,6-1—第一机械手指,6-2—第二机械手指,7-1—后卡位板,7-2—第二定位板,7-3—顶板,8-动平衡配重模块。
具体实施方式
为进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种桌面级机械臂平行夹装置的具体实施方式及工作原理进行详细说明。
为便于描述,以组装后,本实施例中机械手指的工作端位于下方的方式,对本发明的整体结构及各组件所处方位进行详细说明。
如图1所示,本实施例所提供的桌面级机械臂平行夹装置,其基本机构包括:安装架、光轴、机械手指、主轴连杆、连接杆。
光轴包括如图3所示结构的两根光轴:第一光轴1、第二光轴2。第一光轴1与第二光轴2上下布置,平行设置于安装架中。
机械手指包括:第一机械手指6-1、第二机械手指6-2。各个机械手指的结构如图8所示,两个机械手指与各个光轴的连接方式为:第一机械手指6-1与第二机械手指6-2左右布置,参考图1可知,第一机械手指6-1的指端与第二机械手指6-2的指端所构成的区域呈凹槽式结构。第一机械手指6-1、第二机械手指6-2上均开设有第一光轴连接孔、第二光轴连接孔。各个光轴连接孔中均设置有轴套,第一机械手指6-1、第二机械手指6-2均通过轴套与第一光轴1、第二光轴2滑动连接。
本实施例中采用的主轴连杆包括:前主轴连杆5-1、后主轴连杆5-2;第一连接杆包括:第一前连接杆3-1、第一后连接杆3-2;第二连接杆包括:第二前连接杆4-1、第二后连接杆。如图4所示,本实施例中采用的各个连接杆结构一致,采用的主轴连杆为左右对称的结构。
如图6所示,前主轴连杆5-1中部的后侧呈椭圆柱状结构,椭圆柱状结构的高度大于第一光轴、第二光轴的外径,椭圆柱状结构的长轴外径小于第一光轴与第二光轴的间距。
如图7所示,后主轴连杆5-2的中部后侧为驱动机构连接端,本实施例采用反馈舵机作为驱动机构,后主轴连杆5-2通过驱动机构连接端经安装架上的驱动装置执行端连接孔与外界反馈舵机的执行端连接。
前主轴连杆5-1与后主轴连杆5-2分别位于第一光轴1及第二光轴2的前、后两侧,前主轴连杆5-1中部与后主轴连杆5-2的中部锁紧连接,此时,前主轴连杆5-1中部的圆柱状结构处于第一光轴1与第二光轴2之间。
前主轴连杆5-1及后主轴连杆5-2均具有向两侧延伸的展翼式结构。第一前连接杆3-1、第二前连接杆4-1均位于第一光轴及第二光轴的前侧,第一后连接杆3-2、第二后连接杆均位于第一光轴1及第二光轴2的后侧。第一机械手指6-1的前侧通过第一前连接杆3-1与前主轴连杆5-1的展翼式结构的其中一个端部连接,第一机械手指6-1的后侧通过第一后连接杆3-2与后主轴连杆5-2的展翼式结构的其中一个端部连接;第二机械手指6-2的前侧通过第二前连接杆4-1与前主轴连杆5-1的展翼式结构的另一个端部连接,第二机械手指6-2的后侧通过第二后连接杆与后主轴连杆5-2的展翼式结构的另一个端部连接。如图1所示,第一连接杆、主轴连杆、第二连接杆三者连接后形成Z字型结构。
如图1、图5所示,本实施例中采用的安装架包括:前卡位板、后卡位板7-1、顶板7-3。前卡位板的左右两侧、后卡位板7-1的左右两侧均设置有光轴夹持结构,前卡位板、顶板7-3、后卡位板7-1之间通过可拆方式连接,前卡位板、后卡位板7-1、顶板7-3、左右两侧的光轴夹持结构合围成开口向下的腔体。
光轴夹持结构为:前卡位板的左右两侧设置有朝向后卡位板7-1方向延伸的第一定位板;后卡位板7-1的左右两侧设置有朝向前卡位板方向延伸的第二定位板7-2,第一定位板上于第一光1的轴端部及第二光轴2的端部相应位置处、第二定位板7-2上于第一光轴1的端部及第二光轴2的端部相应位置处,均开设有夹持槽,夹持槽呈弧形结构,弧形结构的深度小于第一光轴1、第二光轴2的半径,弧形结构的弧度大于第一光轴、第二光轴的弧度。当前卡位板与后卡位板7-1锁紧连接时,第一定位板与第二定位板通过弧形结构的夹持槽将第一光轴1及第二光轴2夹紧固定。
在图2中安装架的后卡位板7-1上,本实施例还设置了动平衡配重模块8,能够进一步增加机械手指移动时的稳定性。在轻度应用场合,动平衡配重模块可以由电池与无线模块替代,无需导电滑环即可实现无尾缆限位缠绕。
本实施例中所有非标准零件均可通过3D打印机加工而成,结构精巧、动作精度高、控制简单便利,消除了垂直方向的抖动位移,提升了夹持的稳定性与动作的精确性。
最后所应说明的是,以上具体实施方式仅用以说明本发明的技术方案而非限制,尽管参照实例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。