一种腹腔镜肾脏抓持器
文献发布时间:2023-06-23 06:30:03
技术领域
本发明主要涉及医疗器械技术领域,尤其涉及一种腹腔镜肾脏抓持器。
背景技术
临床上的腹腔镜手术中由于缺少专门针对肾脏的抓持手术器械,通常只能使用腔镜胃钳或腔镜肠钳来抓持肾脏。腔镜胃钳和腔镜肠钳为了能够稳固抓持胃和肠道这类质软的空腔脏器,被设置成刚性的钳状结构。但肾脏是表面光滑且质地相对坚硬的实性脏器,利用刚性的、钳状结构的腔镜胃钳或腔镜肠钳来抓持时,当握持力不足时,在牵拉移动过程中钳体易在肾脏表面打滑,从而造成抓不稳的情况;当握持力过大时,刚性钳体又可能对肾脏造成损伤。可见,现有技术中使用腔镜胃钳或腔镜肠钳来抓持肾脏具有极高的操作难度,对临床医生提出了极高的技艺要求,且给病人带来了肾脏损伤的风险。因此,亟需一种适用于表面光滑且质地相对坚硬的实性脏器的腹腔镜肾脏抓持器。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种腹腔镜肾脏抓持器。
为解决上述技术问题,本发明采用以下技术方案:
一种腹腔镜肾脏抓持器,包括用于穿过腹腔镜进入人体的枪管和与之相连的壳状枪体;所述枪管内可伸缩地穿设有若干近端连通负压机构、远端用于吸附肾脏的牵引管,所述枪体内安装有用于调节所述牵引管伸缩程度的控制机构。
作为上述技术方案的进一步改进:
所述枪管内经瓣壁沿其长度方向分隔成若干管腔,各所述管腔内均穿设有一根牵引管。
所述枪体与所述枪管可拆卸连接。
所述负压机构包括三通管,所述三通管的第一端与外部负压发生器相连通、第二端与各牵引管相连、第三端设有用于调节负压吸引力及紧急释放压力的安全阀。
所述安全阀包括成型于三通管末端并穿出枪体的套管,所述套管两端经旁路管连通,且其末端丝接成型有气孔的阀盖,所述阀盖经弹簧牵拉内置于套管的滑块。
所述牵引管的远端连通有用于吸附肾脏的吸盘;所述吸盘包括若干呈放射状排布的弹性收合式骨架杆,各相邻的所述骨架杆间经柔性蹼膜相连。
所述控制机构包括若干铰接于枪体的扳机,各所述扳机经线绳分别对应牵拉各牵引管。
各所述牵引管上分别套设有分弹性管,与扳机相连的线绳与所述分弹性管相连。
所述控制机构包括铰接于枪体的拨杆,所述拨杆经线绳同时牵拉各牵引管。
各所述牵引管上共同套设有总弹性管,与拨杆相连的线绳与所述总弹性管相连。
与现有技术相比,本发明的优点在于:
枪管经腹腔镜由患者体外穿入至体内,医生手持枪体控制枪管的探入深度和角度,并能够通过控制机构分别改变每根柔性的牵引管从枪管远端探出的长度。牵引管的近端与负压机构相连,当牵引管的远端贴合肾脏时能够通过牵引管内的负压对肾脏产生吸引,从而形成稳固连接,而后医生通过操控枪体和控制机构改变牵引管对肾脏的牵拉效果(包括改变牵拉方向、翻转角度和牵拉力度等),以配合手术。相对于现有技术中用硬质的腔镜胃钳或腔镜肠钳来抓持肾脏,本申请采用负压吸引的方式形成连接,从而能够避免夹持式连接时可能产生的打滑和对肾脏造成挤压损伤,从而降低了医生的操作难度和患者肾脏损伤的风险。
附图说明
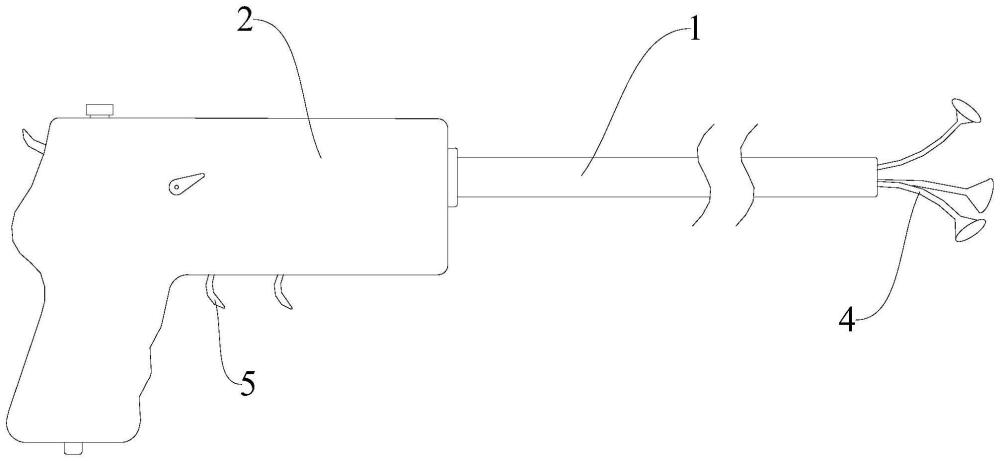
图1是腹腔镜肾脏抓持器的结构示意图;
图2是利用腹腔镜肾脏抓持器抓持肾脏的示意图;
图3是腹腔镜肾脏抓持器的局部结构示意图(牵引管松弛状态);
图4是负压机构的工作原理示意图(三通管内负压正常状态);
图5是负压机构的工作原理示意图(三通管内负压过大状态);
图6是腹腔镜肾脏抓持器的局部结构示意图(扳机控制单根牵引管弯曲的状态);
图7是腹腔镜肾脏抓持器的局部结构示意图(拨杆控制全部牵引管弯曲的状态);
图8是腹腔镜肾脏抓持器的局部结构示意图(拨杆和扳机同时控制牵引管弯曲的状态);
图9是枪管的剖面示意图;
图10是吸盘41的结构示意图。
图中各标号表示:1、枪管;11、瓣壁;12、管腔;2、枪体;3、负压机构;31、三通管;32、安全阀;321、套管;322、旁路管;323、阀盖;324、弹簧;325、滑块;33、气囊;4、牵引管;41、吸盘;411、骨架杆;412、蹼膜;5、控制机构;51、扳机;52、线绳;53、分弹性管;54、拨杆;55、总弹性管。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
如图1至图10所示,本实施例的腹腔镜肾脏抓持器,包括用于穿过腹腔镜进入人体的枪管1和与之相连的壳状枪体2;枪管1内可伸缩地穿设有若干近端连通负压机构3、远端用于吸附肾脏的牵引管4,枪体2内安装有用于调节牵引管4伸缩程度的控制机构5。枪管1经腹腔镜由患者体外穿入至体内,医生手持枪体2控制枪管1的探入深度和角度,并能够通过控制机构5分别改变每根柔性的牵引管4从枪管1远端探出的长度。牵引管4的近端与负压机构3相连,当牵引管4的远端贴合肾脏时能够通过牵引管4内的负压对肾脏产生吸引,从而形成稳固连接,而后医生通过操控枪体2和控制机构5改变牵引管4对肾脏的牵拉效果(包括改变牵拉方向、翻转角度和牵拉力度等),以配合手术。相对于现有技术中用硬质的腔镜胃钳或腔镜肠钳来抓持肾脏,本申请采用负压吸引的方式形成连接,从而能够避免夹持式连接时可能产生的打滑和对肾脏造成挤压损伤,从而降低了医生的操作难度和患者肾脏损伤的风险。
本实施例中,枪管1内经瓣壁11沿其长度方向分隔成若干管腔12,各管腔12内均穿设有一根牵引管4。由于可能存在多根牵引管4,为了避免其在枪管1内发生缠绕而影响操作,沿枪管1的长度方向设置有瓣壁11,经瓣壁11分隔的枪管1内部形成有若干管腔12,管腔12的数量与牵引管4的数量保持一致,且每个管腔12内有且只有一根能够沿枪管1的长度方向移动牵引管4,从而能够有效避免牵引管4的相互干涉。
本实施例中,枪体2与枪管1可拆卸连接。由于枪体2由医生握持、位于患者体外,而枪管1的远端需穿过腹腔镜进入患者体内,因此枪管1与枪体2对于消毒的严格程度存在差异。通过将枪体2与枪管1设置成可拆卸形式的连接方式,可以分别对枪体2和枪管1执行不同等级的消毒处理,甚至可以将枪管1作为一次性用品在单次使用后丢弃,以避免交叉感染。
本实施例中,负压机构3包括三通管31,三通管31的第一端与外部负压发生器相连通、第二端与各牵引管4相连、第三端设有用于调节负压吸引力及紧急释放压力的安全阀32。由于三通管31与外部负压发生器相连,在外部负压发生器的作用下三通管31内将形成负压;又因为其第二端与各牵引管4相连通,使得牵引管4的远端能够对肾脏产生吸附效果。但当负压过大时,牵引管4对肾脏的吸引力过大将造成肾脏损伤,此时需要进行紧急泄压以对肾脏形成保护,通过在三通管31的第三端设置安全阀32,当三通管31内的负压过大时,安全阀32能够自动开启并与外部大气相连通,此时外部大气通过安全阀32进入三通管31内从而实现泄压功能。具体地,安全阀32包括成型于三通管31末端并穿出枪体2的套管321,套管321两端经旁路管322连通,且其末端丝接成型有气孔的阀盖323,阀盖323经弹簧324牵拉内置于套管321的滑块325。滑块325的直径与套管321的内径一致、能够在套管321内往复滑动,且套管321的底部内缩、旁路管322的下端开口位于套管321内缩部的下侧,从而能够避免滑块325对其造成堵塞。当三通管31内负压大小正常时,滑块325在弹簧324向上的牵拉和负压向下的吸引下保持平衡,且此时滑块325封堵旁路管322上端开口、外部气体无法通过旁路管322进入三通管31内(如图4所示);当三通管31内的负压逐渐增大时,滑块325所受的向下的吸引力逐渐变大,滑块325下移,当旁路管322的上端开口超出滑块325顶面时,旁路管322被连通,此时外部大气通过阀盖323上的气孔进入套管321,而后流入旁路管322的上端开口并从其下端开口流出,从而进入三通管31内,产生泄压效果(如图5所示)。不仅如此,阀盖323与套管321丝接,通过旋拧阀盖323能够改变滑块325的初始高度,从而改变泄压发生时的三通管31内的负压大小。具体地,三通管31的第二端端头还成型有气囊33,各牵引管4与气囊33形成固定连接。
本实施例中,牵引管4的远端连通有用于吸附肾脏的吸盘41;吸盘41包括若干呈放射状排布的弹性收合式骨架杆411,各相邻的骨架杆411间经柔性蹼膜412相连。吸盘41与牵引管4相连通,通过吸盘41直接贴合肾脏能够增大接触面积,从而减小压强、避免对肾脏造成损伤。由于吸盘41安装在牵引管4的端头,并跟随牵引管4在枪管1内伸缩运动,为了使吸盘41能够自由进出枪管1,将吸盘41设置成收合式的弹性结构。具体地,吸盘具有若干根骨架杆411,骨架杆411均为弹性杆,且呈放射状排布,当吸盘41需要进入枪管1中时,在枪管壁的挤压作用下,骨架杆411向内聚拢,从而缩小体积;当吸盘41伸出枪管1时,由于骨架杆411为弹性杆,其能够自动恢复放射形状,从而将相邻骨架杆411间相连的柔性蹼膜412撑开,共同形成喇叭状。进一步地,牵引管4的远端弯曲,当伸出枪管1时朝异向扩散呈放射状。更进一步地,牵引管4由内管和外管组成,内管为柔性气管、用于提供气体通道;外管为弹性鞘管、用于提供弯曲力。
优选的,本装置的牵引管4-吸盘41数量可以设置为3套,但不限于3套。
本实施例中,控制机构5包括若干铰接于枪体2的扳机51,各扳机51经线绳52分别对应牵拉各牵引管4。各牵引管4上分别套设有分弹性管53,与扳机51相连的线绳52与分弹性管53相连。通过设置扳机51,利用线绳52将每个扳机51与一根牵引管4相连,使得扣动扳机51时能够牵拉对应的牵引管4而使其在枪体2内形成弯曲,又因为牵引管4的近端与气囊33固定相连不能移动,故其发生弯曲时,用于吸引肾脏的远端将朝向枪管1回缩,从而能够牵拉肾脏移动。通过各扳机51的配合,医生可以操控不同的牵引管4进行不同程度的回缩,从而牵拉肾脏进行翻转。不仅如此,为了使牵引管4在松开扳机51后能够自动复位,在各牵引管4上还分别套设有分弹性管53,分弹性管53的原始状态呈直管形态,在线绳52的牵拉作用下能够弯曲,在线绳52的拉力消失后,分弹性管53能够自动回弹并驱使牵引管4复位。
优选的,本装置枪体2的形状及扳机51的位置符合人体工程学,以获得较好的握感和舒适的扳机控制。
本实施例中,控制机构5包括铰接于枪体2的拨杆54,拨杆54经线绳52同时牵拉各牵引管4。各牵引管4上共同套设有总弹性管55,与拨杆54相连的线绳52与总弹性管55相连。通过设置拨杆54,利用线绳52将拨杆54与所有牵引管4相连,当旋扭拨杆54时,线绳52牵拉所有牵引管4同时发生弯曲,从而使得所有牵引管4用于吸引肾脏的远端朝向枪管1回缩。通过设置拨杆54,能够控制各牵引管4远端伸出枪管1的最远距离、实现总控功能。且拨杆54可以配合扳机51共同作用,实现对牵引管4的多重调控。不仅如此,为了使牵引管4在松开拨杆54后能够自动复位,在全部牵引管4外还共同套设有一总弹性管55,总弹性管55的原始状态呈直管形态,在线绳52的牵拉作用下能够弯曲,在线绳52的拉力消失后,总弹性管55能够自动回弹并驱使牵引管4复位。
牵引管4能够穿行于与壳状枪体2固接的枪管1,牵引管4可于枪管1内伸缩滑动;牵引管4的远端能够通过弹性管的复原力实现向前推动、也能够通过线绳的牵拉力实现向后回缩。且牵引管4设置成具有韧性的、远端向枪管1外侧弯曲的半刚性管道,当其伸出枪管1后,其伸展幅度与伸出长度相关,从而能够通过伸缩形式控制牵引管4的缩、展,实现对肾脏多方位的牵拉,进而能够通过改变不同部位的伸缩状态实现对肾脏进行翻转的控制效果。
虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。