一种用于钵苗移栽的自动取送苗机及取送苗方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及移栽机械技术领域,具体涉及一种用于钵苗移栽的自动取送苗机及取送苗方法。
背景技术
目前,烟草钵苗移栽主要以人工手动投苗为主,受操作员行走速度与投苗速度的影响,现有的人工投苗移栽机速度慢,工人劳动强度大。我国的烟草钵苗主要采用聚苯乙烯泡沫塑料制作的漂浮秧盘育苗,漂浮秧盘浸润并浮于营养液上,由于聚苯乙烯泡沫塑料秧盘弯折易断裂的问题,从这种秧盘自动取苗的难度非常大。但是,随着目前农用劳动力日益短缺,人工投苗移栽用工量大,节本增效效果差,人工投苗移栽机已经不能满足人们对高效移栽的需求了。亟需设计一种合理的烟草钵苗自动取苗方案,以突破现有技术中不可弯折的聚苯乙烯泡沫塑料秧盘烟草钵苗自动高速取苗、分苗的技术难题。
发明内容
本发明的目的在于提供一种用于钵苗移栽的自动取送苗机及取送苗方法,从而解决上述问题。
为实现上述目的,本发明公开了一种用于钵苗移栽的自动取送苗机,包括呈框架结构的机架,所述机架上设有用于运送苗盘的苗盘输送装置、钵苗取运装置以及钵苗分序装置,苗盘由纵横排列的苗盘钵体组成,所述苗盘输送装置包括:用于传送苗盘的传送带、压盘组件、分苗挡板以及传感器组,所述压盘组件设于所述传送带的两侧用于压紧所述苗盘;所述分苗挡板设于所述传送带的两侧中部;所述传送带水平穿设于所述钵苗取运装置的下方,并由同步带轮电机驱动进行单向运转实现苗盘的单向连续供给,所述传感器组用于检测苗盘位置并控制所述同步带轮电机,当检测到苗盘到达预定取苗位置时,控制同步带轮电机点动送盘,并在苗盘中最后一排钵苗全部取出后将空的苗盘送出;
所述钵苗取运装置包括:滚珠丝杠、驱动滚珠丝杠转动的滚珠丝杠电机以及两组分别位于所述传送带两侧的苗夹组机构,两组所述苗夹组机构分别装设于所述滚珠丝杠上的两组输苗滑块座上,通过滚珠丝杠电机工作带动做相向和背向的往返平移运动;所述滚珠丝杠横跨于所述传送带的中部上方,当所述传送带上的苗盘到达预定取苗位置时,两组所述苗夹组机构分别从两侧同时递进等距取苗,并通过分苗挡板投送至所述钵苗分序装置;
所述钵苗分序装置包括:水平设于传送带下方的转盘、驱动所述转盘转动的转盘电机、设于转盘上的多个投苗杯以及设于分苗挡板下方的分序传感器,所述分序传感器用于检测钵苗是否位于投苗杯上方;当所述钵苗到达投苗杯里时,转盘带动钵苗旋转至中间的预设位置进行投苗。
作为上述技术方案的进一步改进:
单侧取苗的列数为苗盘中钵苗列数的一半;所述递进等距取苗具体为:当第一列的钵苗被全部取出后,苗夹组机构再往前递进一个距离夹取下一列钵苗,依次类推,直至单侧的钵苗被全部取出。
所述苗夹组机构包括移动组件、夹苗组件和挡苗组件;
所述移动组件包括与滚珠丝杠的输苗滑块座连接的竖向移动板、设于移动板顶端的第一舵机,所述第一舵机的输出轴水平设置并连接一由第一连杆、第二连杆、第三连杆、第四连杆和苗夹连接杆组成的五连杆机构;所述第一连杆与第一舵机的输出轴铰接,第三连杆的外端与移动板铰接,中段通过第二连杆与第一连杆铰接,内端与竖向设置的苗夹连接杆中部两侧铰接;第四连杆的外端与移动板铰接,内端与苗夹连接杆下部两侧铰接;第四连杆与第三连杆平行并位于其下方,所述苗夹连接杆的底端连接所述的夹苗组件,第一舵机工作时,带动所述的五连杆机构上下移动,所述夹苗组件随之进行上下移动;滚珠丝杠工作时,所述夹苗组件随之进行水平移动;
所述夹苗组件包括两个用于夹取钵苗的苗夹、苗夹连接板以及控制两个苗夹开合的苗夹开启机构,所述苗夹连接板的中部水平连接于苗夹连接杆的底端,所述苗夹包括两个在中部交叉并由齿轮配合咬合的的夹爪,两个苗夹并列铰接于苗夹连接板的两端,所述苗夹开启机构包括第一凸轮以及输出轴竖直设置的第二舵机,所述第一凸轮与第二舵机连接并水平装设于两个苗夹的夹尾之间,第二舵机工作时带动第一凸轮转动使苗夹实现开合;
所述挡苗组件包括挡苗板、第二凸轮以及输出轴水平布置的第三舵机;挡苗板设有两件并列位于相应苗夹的夹头上方,两件挡苗板的顶端通过一共同的销轴铰接于苗夹连接杆的顶端两侧并能绕铰接轴转动,第三舵机安装在苗夹连接杆的背侧,第二凸轮与第三舵机相连;在夹苗位置时,第二凸轮处于初始状态,挡苗板处于竖直状态防止钵苗向夹苗组件中倾斜,在投苗位置时,第二凸轮在第三舵机工作下向前推出挡苗板,将钵苗从苗夹向前面推出,防止卡苗。
所述压盘组件包括活动压轨、固定压轨、流利条、拉簧、活页以及活动压轨位置固定卡扣;所述流利条设于机架上并沿传送带的输送方向位于传送带的两侧,所述活动压轨通过活页设于流利条上位于传送带的输入端,流利条和活动压轨间通过一拉簧连接,实现活动压轨的开合;固定压轨设于流利条上位于传送带的输出端。
所述机架的顶部呈一长方形水平框架结构,所述传送带绕设于两个平行布置的辊筒上,两个辊筒通过轴承分设于长方形水平框架的两端;所述滚珠丝杠的两端分别装设于所述长方形框架的中部两侧;长方形框架的中部两侧还设有水平向外延伸的小框架,所述分苗挡板竖直装设于所述小框架内。
所述传感器组包括两个用于控制送盘过程的送苗传感器,分设于长方形水平框架底部的两侧,与传送带之间的距离保持为2mm;其中一个为苗盘单次供给位置指示传感器,另一个为单盘限位位置传感器;所述苗盘装设于传送带上后,所述同步带轮电机开始工作,当苗盘到达预定取苗位置时,所述苗盘单次供给位置指示传感器与传送带的感应片接触,控制同步带轮电机停止,随后单盘限位位置传感器开始工作,与传送带接触配合,控制同步带轮电机带动传送带开始点动送盘;当苗盘最后一排苗全部取出后,苗盘单次供给位置指示传感器开始工作,控制同步带轮电机带动传送带将空的苗盘送出。
所述的分苗挡板为外凸的圆弧形结构,每组分苗挡板均设有并排的两个,并与各苗夹的位置对应。
所述活动压轨和固定压轨均呈7字形的条状,所述拉簧的顶端通过螺钉与活动压轨连接,拉簧的下端连接在流利条上开的孔内。
所述第四连杆、第三连杆上均开设有镂空通孔,所述第二连杆的下端插设于第三连杆中段的镂空孔内与其铰接,所述第二舵机位于第四连杆的镂空通孔内。
本发明还提供一种用于钵苗移栽的自动取送苗机的自动取送苗方法,包括以下步骤:
a) 将装满钵苗的苗盘放置在传送带上,启动同步带轮电机,传送带带动苗盘向前移动;
b) 当苗盘单次供给位置指示传感器检测到苗盘到达预设取苗位置时,停止同步带轮电机,单盘限位位置传感器工作,控制同步带轮电机带动传送带开始点动送盘;
c) 取苗定位阶段:第一舵机驱动五连杆机构带动苗夹向下移动到极限位置,滚珠丝杠带动左右两组夹苗组件向待夹取的钵苗空载前进,直到苗夹与待夹取的钵苗对齐;
d) 垂直取苗阶段:启动第二舵机,使第一凸轮转动,控制苗夹闭合,分别夹住两个目标钵苗;第一舵机驱动五连杆机构向上移动到极限位置,苗夹夹紧两株钵苗随之竖直向上移动,直至钵苗脱离苗盘;
e) 投苗定位阶段:滚珠丝杠带动夹苗组件向侧面的分苗挡板的正上方移动;同时第一舵机驱动五连杆机构向下移动到极限位置;
f)开夹投苗阶段:启动第二舵机,使第一凸轮转动,控制苗夹张开,同时启动第三舵机,控制第二凸轮转动推出挡苗板,使钵苗落入分苗挡板中,再落入钵苗分序装置的投苗杯中;
g) 完成投苗后,苗夹组机构在滚珠丝杠的带动下向中间的钵苗位置递进一个距离空载前进;
h) 重复步骤c)至g),直到取出苗盘中的前两排钵苗;
i) 启动同步带轮电机,使传送带带动苗盘向前移动一个间距;
j) 重复步骤b)至i),直到取出所有钵苗;
k) 当分序传感器检测到钵苗到达分序位置时,将钵苗旋转至中间的预设位置进行投苗。
与现有技术相比,本发明的优点在于:
1、本发明从苗盘侧面取苗,通过钵苗分序装置旋转至中间位置投苗,解决了不可弯折的聚苯乙烯泡沫塑料苗盘取苗与投苗位置干涉的难题。
2、本发明采用两个侧面同时取苗,在钵苗分序装置中交错投苗,一次取多株钵苗,一次取苗行程能顺序投出多株钵苗,提高了自动取苗速度。
3、钵盘输送、钵苗取运、分苗投放全自动控制,作业精准可靠。
附图说明
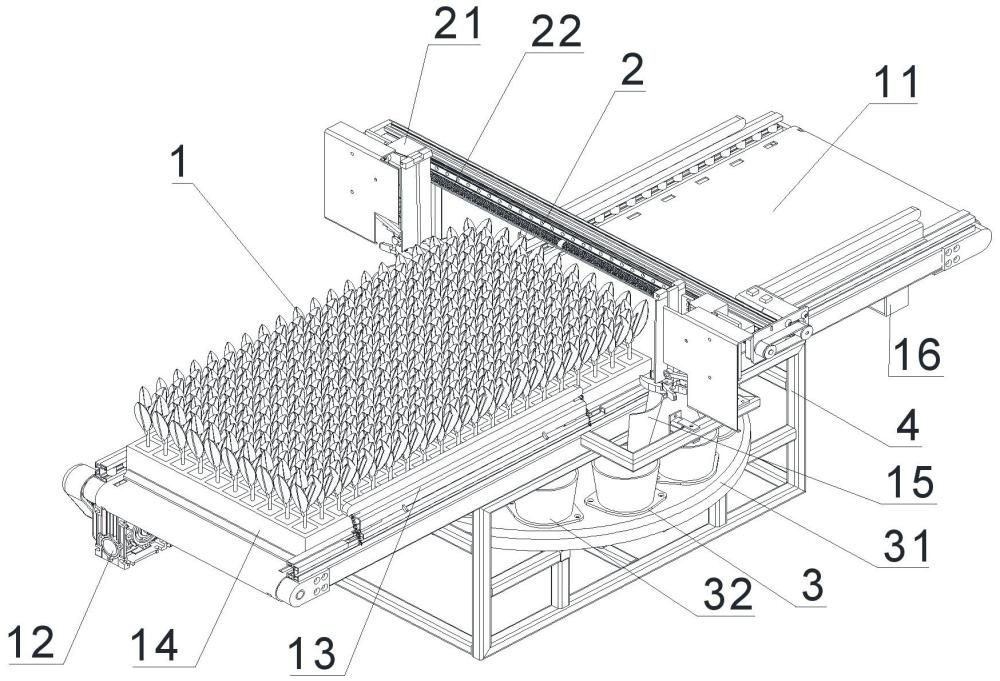
图1 是本发明自动取送苗机的立体结构示意图。
图2 是本发明中苗盘输送装置的立体结构示意图。
图3 是本发明中压盘组件的立体结构示意图。
图4是图3中A处的局部放大结构示意图。
图5是本发明中压盘组件工作时压紧苗盘的示意图。
图6 是本发明中压盘组件的结构示意图(其中的活动压轨打开的状态)。
图7 是本发明中钵苗取运装置的立体结构示意图。
图8 是本发明中苗夹组机构的立体结构示意图。
图9 是本发明中苗夹组机构的运动关系示意图。
图10是本发明中苗夹组机构拔苗的原理示意图。
图11 是本发明中苗夹闭合的结构示意图。
图12 是本发明中苗夹张开的结构示意图。
图13-1至图13-4是本发明取送苗过程的步骤示意图。
图14是本发明的分组取苗原理图。
图15是苗盘输送装置中传感器组的位置示意图。
图例说明:
1、苗盘输送装置;11、传送带;12、同步带轮电机;13、压盘组件;131、固定压轨;132、活动压轨;133、活动压轨位置固定卡扣;134、活页;135、拉簧;136、流利条;14、苗盘;15、分苗挡板;16、苗盘单次供给位置指示传感器;17、单盘限位位置传感器;2、钵苗取运装置;21、苗夹组机构;211、第一舵机;212、第一连杆;213、第二连杆;214、第三连杆;215、第四连杆;216、第二舵机;217、第一凸轮;218、夹苗组件;2181、苗夹;2182、苗夹连接板;219、第二凸轮;2110、第三舵机;2111、苗夹连接杆;2112、挡苗板;2113、移动板;22、滚珠丝杠;3、钵苗分序装置;31、转盘;32、投苗杯;4、机架。
具体实施方式
以下结合附图和具体实施例对本发明作进一步详细说明。
如图1-图15所示,本实施例的用于钵苗移栽的自动取送苗机,包括机架4以及设于机架4上的苗盘输送装置1,钵苗取运装置2、钵苗分序装置3。
本实施例中,苗盘输送装置1包括用于传送苗盘14的水平传送带11、传感器组、用于压紧苗盘14的压盘组件13、用于分隔钵苗的分苗挡板15以及用于驱动水平传送带11进行单向运转的同步带轮电机12。其中,苗盘14由多个纵横排列的苗盘钵体构成。压盘组件13设于水平传送带11的两侧;分苗挡板15设于水平传送带11的两侧中部;传送带11水平穿设于钵苗取运装置2的下方,并由同步带轮电机12驱动进行单向运转实现苗盘的单向连续供给,传感器组用于检测苗盘14位置并控制同步带轮电机12的运转,当检测到苗盘14到达预定取苗位置时,控制同步带轮电机12点动送盘,并在苗盘14中最后一排钵苗全部取出后将空的苗盘14送出。
本实施例中,机架4的顶部呈一长方形水平框架结构,传送带11绕设于两个平行布置的辊筒上,两个辊筒通过轴承分设于长方形水平框架的两端;长方形框架的中部两侧还设有水平向外延伸的小框架,分苗挡板15竖直装设于小框架内。
传感器组包括两个用于控制送盘过程的送苗传感器,分设于长方形水平框架底部的两侧,并与传送带11之间的距离保持为2mm;其中一个为苗盘单次供给位置指示传感器16,另一个为单盘限位位置传感器17;苗盘14装设于传送带11上后,同步带轮电机12开始工作,当苗盘14到达预定取苗位置时,苗盘单次供给位置指示传感器16与传送带11的感应片接触,控制同步带轮电机12停止,随后单盘限位位置传感器17开始工作,与传送带11接触配合,控制同步带轮电机12带动传送带11开始点动送盘;当苗盘14最后一排苗全部取出后,苗盘单次供给位置指示传感器16开始工作,控制同步带轮电机12带动传送带11将空的苗盘14送出,送盘结束。
本实施例中,压盘组件13包括活动压轨132、固定压轨131、流利条136、拉簧135、活页134以及活动压轨位置固定卡扣133;流利条136设于机架4上并沿传送带11的输送方向位于传送带11的两侧,活动压轨132通过活页134设于流利条136上位于传送带11的输入端,流利条136和活动压轨132间通过一拉簧135连接,实现活动压轨的开合。本实施例中,活动压轨132和固定压轨131均呈7字型的条状,拉簧135的顶端通过一螺母与活动压轨132连接,拉簧135的下端连接在流利条136上开的孔内。固定压轨131设于流利条136上位于传送带11的输出端;本实施例中,分苗挡板15为外凸的圆弧形结构,每组分苗挡板15均设有并排的两个,并与苗夹2181位置对应。
如图5、图6所示,正常工作时,在拉簧135的拉力下,活动压轨132将苗盘14压在传送带11上,避免钵苗取运装置2在夹苗时连带着将苗盘14向上拔起。当需要替换苗盘14时,用手将活动压轨132往两边扳开,使活动压轨位置固定卡扣133与流利条136紧扣在一起,在拉簧135的拉力下使活动压轨132始终处于开启状态;替换苗盘14后,用手抠动活动压轨位置固定卡扣133使其与流利条136分离,人为将活动压轨132向中间合拢,当活动压轨压住苗盘14后松手,此时活动压轨132在拉簧135的拉力下会紧紧压住苗盘14。
本实施例中,钵苗取运装置2包括:滚珠丝杠22和两组苗夹组机构21,滚珠丝杠22由滚珠丝杠电机驱动;滚珠丝杠22的两端分别装设于长方形框架的中部两侧;两组苗夹组机构21的结构完全相同并对称装设于滚珠丝杠22两端的输苗滑块座上,组成一套能左右平移的平移机构,能随着滚珠丝杠电机工作被滚珠丝杠22带动做相向和背向的往返平移运动;两组苗夹组机构21还分别位于传送带11的两侧,当传送带11上的苗盘14到达预设取苗位置时,两组苗夹组机构21分别从两侧同时进行递进等距取苗,通过分苗挡板15投送至钵苗分序装置。单侧取苗的列数为苗盘14中钵苗列数的一半;递进等距取苗具体为:当第一列的钵苗被全部取出后,苗夹组机构21再往前递进一个距离夹取下一列钵苗,依次类推,直至单侧的钵苗被全部取出。
本实施例中,苗夹组机构21包括移动组件、夹苗组件和挡苗组件。
其中,移动组件包括与滚珠丝杠22的输苗滑块座连接的竖向移动板2113、设于移动板2113顶端的第一舵机211,第一舵机211的输出轴水平设置并连接一由第一连杆212、第二连杆213、第三连杆214、第四连杆215和苗夹连接杆2111组成的五连杆机构;第一连杆212的上端与第一舵机211的输出轴铰接,第三连杆214的外端(即远离传送带的一端)与移动板2113铰接,中段通过第二连杆213与第一连杆212的下端铰接,第三连杆214的内端(即靠近传送带的一端)与竖向设置的苗夹连接杆2111中部两侧铰接;第四连杆215的外端与移动板2113铰接,内端与苗夹连接杆2111下部两侧铰接;第四连杆215与第三连杆214平行并位于其下方,苗夹连接杆2111的底端连接夹苗组件218。第一舵机211工作时,带动五连杆机构上下移动,夹苗组件218随之进行上下移动;滚珠丝杠22工作时,夹苗组件218随之进行水平移动,如图8和图9所示。
本实施例中,夹苗组件218包括苗夹连接板2182、两个用于夹取钵苗的苗夹2181以及控制两个苗夹2181开合的苗夹开启机构,苗夹连接板2182的中部水平连接于苗夹连接杆2111的底端,苗夹2181包括两个在中部交叉并由齿轮配合咬合的的夹爪,两个苗夹2181并列布置且中部铰接于苗夹连接板2182的两端,苗夹开启机构包括第一凸轮217以及输出轴竖直设置的第二舵机216,第一凸轮217与第二舵机216连接并水平装设于两个苗夹2181的夹尾之间,第二舵机216工作时带动第一凸轮217转动使苗夹2181开合,实现抓苗。当第一凸轮217旋转至如图11的状态时,苗夹闭合夹紧钵苗,第一凸轮217旋转至如图12的状态时,苗夹张开释放钵苗。本实施例中,第四连杆215、第三连杆214上均开设有镂空通孔,第二连杆213的下端插设于第三连杆214中段的镂空孔内与其铰接,第二舵机216位于第四连杆215的镂空通孔内,可防止干扰。
本实施例中,如图8和图10所示,挡苗组件包括挡苗板2112、第二凸轮219以及输出轴水平布置的第三舵机2110;挡苗板2112设有两件并列位于相应苗夹2181的夹头上方,两件挡苗板2112的顶端通过一共同的销轴铰接于苗夹连接杆2111的顶端两侧并能绕铰接轴转动,能沿着滚珠丝杠的运动而往返平移,还能随着苗夹连接杆上下运动。第三舵机2110安装在苗夹连接杆2111的背侧,第二凸轮219与第三舵机2110相连。在夹苗位置时,第二凸轮219处于初始状态,挡苗板2112处于竖直状态防止钵苗向夹苗组件218中倾斜,在投苗位置时,第二凸轮219在第三舵机2110工作下向前推出挡苗板2112,将钵苗从苗夹2181向前面推出,防止卡苗。
通过第一舵机的摆动,带动五连杆机构上下移动,从而实现夹苗组件和挡苗组件的上下移动,实现双排钵苗从苗盘取出后运动至钵苗分序装置中投放。
本实施例中,钵苗分序装置3包括:水平设于传送带11下方的转盘31,转盘31由转盘电机驱动;设于转盘31上的多个投苗杯32;设于分苗挡板15下方的分序传感器,用于检测钵苗是否位于投苗杯32上方;当钵苗到达投苗杯32上方时,苗夹2181松开进行投苗,投苗杯32每间隔4个设置一个信号触发装置,用于分序传感器触发信号,投苗杯32每运动4次,钵苗取运装置2投一次钵苗,每侧同时投放,每侧投放2株,每次共投放4株钵苗。
本实施例中,苗盘输送装置1,钵苗取运装置2、钵苗分序装置3均由控制器控制,控制器根据苗盘输送装置1、钵苗取运装置2以及钵苗分序装置3中的电机、传感器以及舵机等的信号,控制各个部件的动作,实现自动取苗、分序和输送。
如图14(以苗盘中左右分别有5列钵苗为例,Z1-Z5为左边的5列,Y1-Y5为右边的5列)所示,本发明还提供一种用于钵苗移栽的自动取送苗机的自动取送苗方法,包括以下步骤:
a) 将装满钵苗的苗盘14放置在传送带11上,启动同步带轮电机12,传送带11带动苗盘14向前移动;
b) 当苗盘单次供给位置指示传感器16检测到苗盘14到达预设取苗位置时,停止同步带轮电机12,单盘限位位置传感器17工作,控制同步带轮电机12带动传送带11开始点动送盘;
c) 取苗定位阶段(图13-1):第一舵机211驱动五连杆机构带动苗夹2181向下移动到极限位置,滚珠丝杠22带动左右两组夹苗组件218向待夹取的钵苗空载前进,直到苗夹2181与待夹取的目标钵苗(分别为Z1、Y1)对齐;
d) 垂直取苗阶段(图13-2):启动第二舵机216,使第一凸轮217转动,控制苗夹2181闭合,分别夹住两个目标钵苗(Z1、Y1);第一舵机211驱动五连杆机构向上移动到极限位置,苗夹2181夹取两株钵苗随之竖直向上移动,直至钵苗(Z1、Y1)脱离苗盘14;
e) 投苗定位阶段(图13-3):滚珠丝杠22带动两组夹苗组件218移动到侧面的分苗挡板15的正上方;同时第一舵机211驱动五连杆机构向下移动到极限位置;
f)开夹投苗阶段(图13-4):启动第二舵机216,使第一凸轮217转动,控制苗夹2181张开,同时启动第三舵机2110,控制第二凸轮219转动推出挡苗板2112,防止卡苗,使钵苗落入分苗挡板15中,再落入钵苗分序装置3的投苗杯中;
g) 完成投苗后,夹苗组件218在滚珠丝杠22的带动下向中间的钵苗位置递进等距空载前进;
h) 重复步骤c)至g),直到取出苗盘14中的前两排钵苗;
i) 启动同步带轮电机12,使传送带11带动苗盘14向前移动一个间距;
j) 重复步骤b)至i),直到取出所有钵苗;
k) 当分序传感器检测到钵苗到达分序位置时,钵苗取运装置2进行投苗。
如图14中,最初的空载前进设为71mm,钵体直径设为33mm,第2-第5次空载前进的距离分别为104mm、137mm、170mm、203mm。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。对于本技术领域的技术人员来说,在不脱离本发明技术构思前提下所得到的改进和变换也应视为本发明的保护范围。