一种用于肾脏移植的新型自动拉勾装置
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及手术拉钩技术领域,具体为一种用于肾脏移植的新型自动拉勾装置。
背景技术
在开腹肾移植手术中,经常会用到自动拉勾,用于充分暴露手术区域,便于手术视野开阔,方便手术操作;现有技术中的自动拉勾往往需要医护人员通过手部去拉,大大增加了医护人员的工作量,甚至手部会遮挡住手术部位,影响手术的视野,导致手术空间受限;另一方面,现有技术中的自动拉钩结构简单,只能进行简单的拉开,无法调节拉钩的位置和角度,从而导致手术部位无法充分暴露;影响医生的操作;因此,急需一种用于肾脏移植的新型自动拉勾装置来解决当前问题。
发明内容
为解决上述问题,本发明提出了一种用于肾脏移植的新型自动拉勾装置,有效解决了现有技术中手术拉钩结构简单和无法对拉钩方向进行调节的问题;不仅大大降低了医护人员的工作量,同时也方便了医生的治疗。
为实现上述目的,本发明提出了如下技术方案;一种用于肾脏移植的新型自动拉勾装置,包括固定架,固定架上螺接有与其相配合的定位螺柱,固定架上固接有固定柱,固定柱内滑动连接有多边形滑柱,固定柱上螺接有与多边形滑柱相配合的第一固定螺柱;多边形滑柱上固接有第一连接柱,第一连接柱内滑动连接有第一控制柱,第一连接柱上螺接有与第一控制柱相配合的第二固定螺柱,第一控制柱下方转动连接有第一旋转块,第一控制柱内设置有与第一旋转块相配合的第一旋转机构;第一旋转块内转动连接有拉钩,第一旋转块内设置有与拉钩相配合的第二旋转机构。
进一步地:第二旋转机构包括第一旋转块内转动连接的第二蜗杆,第一旋转块内转动连接有与第二蜗杆相啮合的第二蜗杆,第二蜗杆同轴固接有第一小齿轮,第一旋转块内转动连接有与第一小齿轮相啮合的第一内齿轮;第一内齿轮与拉钩同轴固接。
进一步地:第一旋转机构包括第一控制柱内转动连接的第一蜗杆,第一控制柱内转动连接有与第一蜗杆相啮合的第一蜗轮;第一蜗轮与第一旋转块同轴固接。
进一步地:固定架上设置有与定位螺柱相配合的卡槽。
进一步地:多边形滑柱为多边形柱。
进一步地:拉钩前端为半圆形。
与现有技术相比,本发明的增益效果为:
本发明构思巧妙,功能全面,在定位螺柱和固定架的定位下,第一旋转机构和第二旋转机构间的配合,有效实现了对拉钩角度和位置调节,满足了不同情况下的需求;有效解决了现有技术中手术拉钩结构简单和无法对拉钩方向进行调节的问题;不仅大大降低了医护人员的工作量,同时也方便了医生的治疗。
附图说明
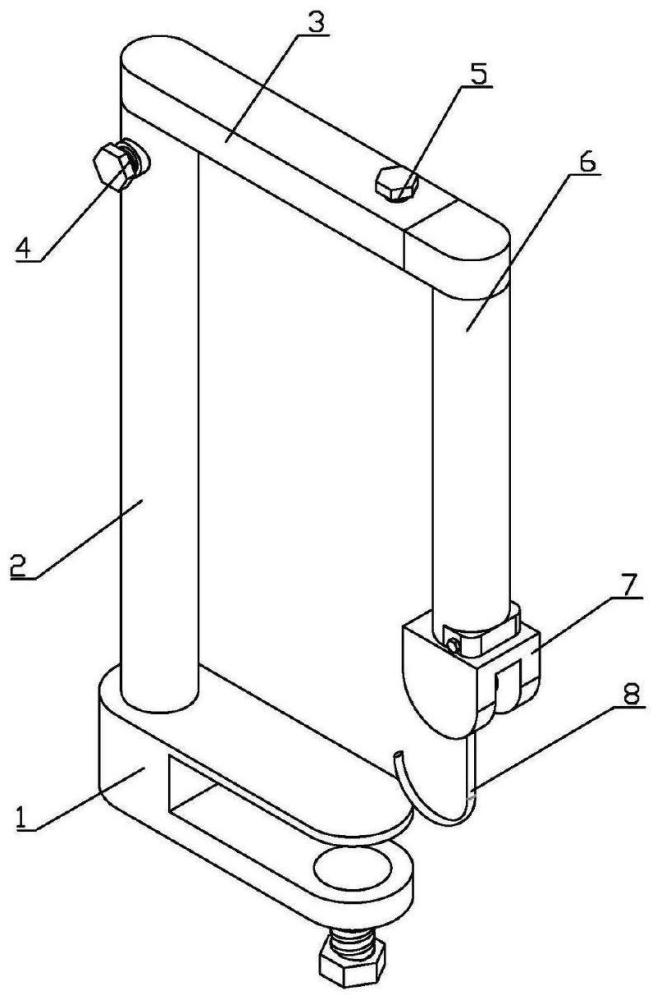
图1为本发明立体图。
图2为本发明局部结构图。
图3为本发明第一旋转机构立体图。
图4为本发明第二旋转机构立体图。
图中:1、固定架,2、固定柱,3、第一连接柱,4、第一固定螺柱,5、第二固定螺柱,6、第一控制柱,7、第一旋转块,8、拉钩,9、多边形滑柱,10、第一蜗轮,11、第二蜗杆,12、第二蜗杆,13、第一小齿轮,14、第一内齿轮,15、第一蜗杆。
实施方式
一种用于肾脏移植的新型自动拉勾装置,包括固定架1,固定架1上螺接有与其相配合的定位螺柱,固定架1上固接有固定柱2,固定柱2内滑动连接有多边形滑柱9,固定柱2上螺接有与多边形滑柱9相配合的第一固定螺柱4;多边形滑柱9上固接有第一连接柱3,第一连接柱3内滑动连接有第一控制柱6,第一连接柱3上螺接有与第一控制柱6相配合的第二固定螺柱5,第一控制柱6下方转动连接有第一旋转块7,第一控制柱6内设置有与第一旋转块7相配合的第一旋转机构;第一旋转块7内转动连接有拉钩8,第一旋转块7内设置有与拉钩8相配合的第二旋转机构;固定架1上设置有与定位螺柱相配合的卡槽;多边形滑柱9为多边形柱;拉钩8前端为半圆形。
如图1和2所示:当医护人员操作本发明时,医护人员可先通过固定螺柱和固定架1将本发明进行固定,然后医护人员可通过第一固定螺柱4和第二固定螺柱5实现对第一旋转块7和拉钩8位置的定位,上述完成后,医护人员可通过第一旋转机构和第二旋转机构调节拉钩8的位置和角度,在拉钩操作过程中,医护人员可通过第一固定螺柱4、第二固定螺柱5和第一旋转机构间的配合实现多角度的操作;有效解决了现有技术中手术拉钩结构简单和无法对拉钩方向进行调节的问题;不仅大大降低了医护人员的工作量,同时也方便了医生的治疗。
第二旋转机构包括第一旋转块7内转动连接的第二蜗杆11,第一旋转块7内转动连接有与第二蜗杆11相啮合的第二蜗杆12,第二蜗杆12同轴固接有第一小齿轮13,第一旋转块7内转动连接有与第一小齿轮13相啮合的第一内齿轮14;第一内齿轮14与拉钩8同轴固接。
如图4所示:电机带动第二蜗杆11转动时,第二蜗杆11转动可通过第二蜗杆12和第一小齿轮13带动第一内齿轮14和拉钩8进行转动,从而实现对拉钩8角度的调节。
第一旋转机构包括第一控制柱6内转动连接的第一蜗杆15,第一控制柱6内转动连接有与第一蜗杆15相啮合的第一蜗轮10;第一蜗轮10与第一旋转块7同轴固接。
如图3所示:第一蜗杆15转动可通过第一蜗轮10带动第一旋转块7和拉钩8进行转动。
本发明的工作过程为:
如图1、2、3和4所示:当医护人员操作本发明时,医护人员可先通过固定螺柱和固定架1将本发明进行固定,然后医护人员可通过第一固定螺柱4和第二固定螺柱5实现对第一旋转块7和拉钩8位置的定位,上述完成后,医护人员可通过第一旋转机构和第二旋转机构调节拉钩8的位置和角度,第一蜗杆15转动可通过第一蜗轮10带动第一旋转块7和拉钩8进行转动;电机带动第二蜗杆11转动时,第二蜗杆11转动可通过第二蜗杆12和第一小齿轮13带动第一内齿轮14和拉钩8进行转动,从而实现对拉钩8角度的调节;在拉钩操作过程中,医护人员可通过第一固定螺柱4、第二固定螺柱5和第一旋转机构间的配合实现多角度的操作;有效解决了现有技术中手术拉钩结构简单和无法对拉钩方向进行调节的问题;不仅大大降低了医护人员的工作量,同时也方便了医生的治疗。