混编碳/碳复合材料预制体成型工装定位光轴插拔机械手
文献发布时间:2023-06-19 09:38:30
技术领域
本发明属于碳纤维立体织物成型设备技术领域,具体涉及一种软硬混编碳/碳复合材料预制体成型工装定位光轴插拔机械手。
背景技术
碳/碳复合材料是近二十年来发展起来的一种结构性材料,其三维织物经过后期的固化处理做成的构件结构性能优越,显著改善了复合材料多方面的力学性能,目前主要用于航空、航天、汽车、医疗等新技术领域。长期以来三维织物都采用人工编织方式进行,使得三维织物的成型效率低、人工劳动强度大、产品的一致性差,随着科学技术的进步,机械自动化已经得到普遍应用。三维整体编织预制体的纤维增强结构在空间上呈网状结构,具有良好的各向同性,抗剪切抗分层能力及抗烧蚀性能,具有优良的可设计性。但是三维整体编织预制体需要良好的各向同性,为了保证编织过程的连续性,需要在主体编织机构以外附加一些附属设备,协助整个编织过程的连续进行。
因此,急需发明一种碳纤维复合材料预制体成型工装定位光轴插拔机械手,主要用于抓取六根对编织过程有干涉的工装定位光轴,通过设计一套系统,避免人工干预,既提高整机工作流畅性,又减少了人力成本。
发明内容
本发明所要解决的技术问题是提供一种软硬混编碳/碳复合材料预制体成型工装定位光轴插拔机械手,其用于在进行碳纤维立体织物的编织工作中完成对编织工作有干涉的工装定位光轴的精准插拔动作,从而使编织机在工作中避免人工干预,提高整机工作流畅性,降低人力成本,提高整机自动化程度。
为解决上述问题,本发明所采用的技术方案是:一种混编碳/碳复合材料预制体成型工装定位光轴插拔机械手,包括机械手主体、Z向线性平动系统和机械手自动对心装置,所述机械手主体上端与机械手自动对心装置底部相连,所述机械手自动对心装置通过连接座与Z向线性平动系统相连,所述机械手主体包括气动机械手,所述气动机械手通过气路控制张开与闭合,实现对定位光轴的抓持动作;所述Z向线性平动系统包括Z向线性模组,通过伺服电机驱动Z向线性模组上的滑块Z向运动,实现机械手主体自动插拔定位光轴的动作;所述机械手自动对心装置包括浮动接头和对心转接件,所述对心转接件将气动机械手与浮动接头相连,利用浮动接头的浮动余量,实现自动与定位光轴对心。
所述机械手主体还包括辅助手指Ⅰ、辅助手指Ⅱ和定位套,所述辅助手指Ⅱ安装在辅助手指Ⅰ上,所述定位套安装在气动机械手上,用以定位辅助手指Ⅰ。
所述辅助手指Ⅱ采用聚氨酯材料加工得到,用以在抓持定位光轴时提供足够的轴向摩擦并减轻定位光轴的磨损程度。
所述Z向线性平动系统还包括定位平板和支撑座,所述Z向线性模组安装在定位平板上,所述定位平板安装在支撑座上,所述支撑座安装在工作平面上,支撑座具有良好的垂直度,定位平板与线性模组接触的表面具有良好的平面度,以此来保证线性模组与水平面垂直关系。
所述机械手自动对心装置还包括支撑架、连接轴、止动销钉和顶丝,所述止动销钉安装在对心转接件侧面的销钉沉孔中,露出的止动销钉部分嵌入连接座的凹槽中,以此实现限制机械手主体的周向运动,所述连接轴用来连接浮动接头与浮动接头支撑架,该连接轴上端螺纹杆部分穿过浮动接头支撑架,用螺母将浮动接头固定在浮动接头支撑架上,安装浮动接头时,先将顶丝顶住连接轴的光轴部分,以方便螺母的拧紧。机械手在抓取定位光轴时,会利用浮动接头的浮动余量,自动将气动机械手爪心与定位光轴轴心对齐,实现精准抓持。
所述控制系统包括人机界面(触摸屏)、PLC可编程控制器,驱动器,伺服电机,电磁阀Ⅰ、电磁阀Ⅱ、光电传感器Ⅰ、光电传感器Ⅱ、光电传感器Ⅲ和接近开关,所述人机界面用于指令的输入与显示,通过数据线与PLC可编程控制器相连,通过数据线将设定的参数输入到PLC可编程控制器中,所述PLC可编程控制器向驱动器、电磁阀Ⅰ和电磁阀Ⅱ发出脉冲指令,所述电磁阀Ⅰ和电磁阀Ⅱ分别控制气动机械手的夹紧和松开动作,所述光电传感器Ⅰ和光电传感器Ⅱ分别限制Z向线性模组上滑块运动的上下极位,所述光电传感器Ⅲ所在位置为原点位置,是气动机械手不工作时和机械手夹持定位光轴悬停位置,所述接近开关安装在气动机械手上,用于检测光轴位置并决定气动机械手夹紧动作。
与现有技术相比,本发明的有益效果是:本发明用于在碳纤维三维织物编织机工作时,对编织工作有干涉的工装定位光轴实现精准插拔的工作,从而使编织机在工作中避免人工干预,提高整机工作流畅性,降低人力成本,提高整机自动化程度,实用性强,便于推广使用。
附图说明
下面通过参考附图并结合实例具体地描述本发明,在附图中:
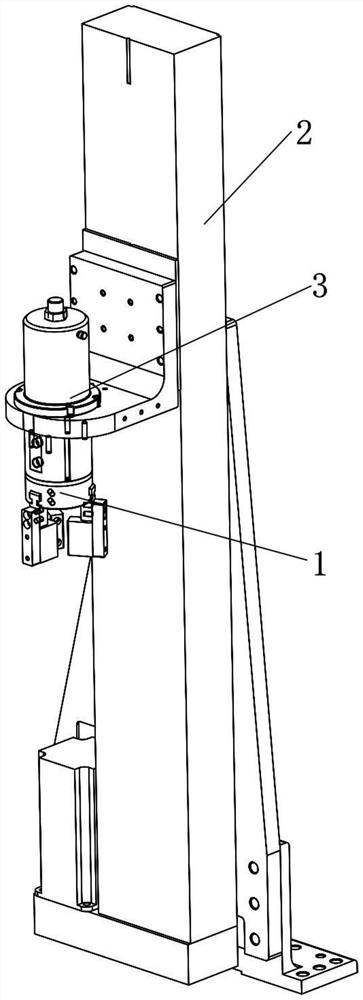
图1是本发明的结构示意图
图2是本发明的主视图
图3是本发明的俯视图
图4是本发明的左视图
图5是本发明机械手主体的结构示意图
图6是本发明Z向线性平动系统的结构示意图
图7是本发明机械手自动对心装置的结构示意图
图8是本发明控制方案示意简图
图9是本发明控制系统框图
图中:
1、机械手主体 2、Z向线性平动系统
3、机械手自动对心装置 4、控制系统
5、定位光轴 101、气动机械手
102、辅助手指Ⅰ 103、辅助手指Ⅱ
104、定位套 201、Z向线性模组
202、伺服电机 203、定位平板
204、支撑座 301、浮动接头
302、浮动接头支撑架 303、连接座
304、对心转接件 305、连接轴
306、止动销钉 307、顶丝
401、接近开关 402、光电传感器Ⅰ
403、光电传感器Ⅱ 404、光电传感器Ⅲ
具体实施方式
下面结合实施例及其附图进一步描述本发明。
如图1至图9所示,本发明的一种混编碳/碳复合材料预制体成型工装定位光轴插拔机械手,包括机械手主体1、Z向线性平动系统2、机械手自动对心装置3,机械手主体1包括气动机械手101、辅助手指Ⅰ102、辅助手指Ⅱ103、定位套104,该机械手主体1通过气路控制气动机械手101的张开与闭合完成对定位光轴的抓持动作;Z向线性平动系统2包括Z向线性模组201、伺服电机202、定位平板203、支撑座204,通过伺服电机202驱动Z向线性模组201上的滑块Z向运动,通过Z向线性模组201上滑块的Z向运动来带动机械手主体在Z向运动,从而实现机械手主体1自动插拔定位光轴的动作;机械手自动对心装置3包括浮动接头301、浮动接头支撑架302、连接座303、对心转接件304、连接轴305、止动销钉306、顶丝307,利用浮动接头301的浮动余量,使机械手主体在存在加工误差和装配误差的情况下能够自动与定位光轴对心,准确完成抓持动作。
机械手主体1中气动机械手101可根据实际需要选用FESTO公司提供的合适的标准型号,气动机械手101连接气路,通过电磁阀控制机械手的张开与闭合;辅助手指Ⅱ103安装在辅助手指Ⅰ102上,其可采用聚氨酯材料加工得到,用以在抓持定位光轴时提供足够的轴向摩擦并减轻定位光轴的磨损程度;定位套104安装在气动机械手101的手指上,用以定位辅助手指Ⅰ102。
Z向线性平动系统2中Z向线性模组201安装在定位平板203上,定位平板203安装在支撑座204上,支撑座204安装在工作平面上,支撑座应具有良好的垂直度,定位平板203与Z向线性模组接触的表面应具有良好的平面度,以此来保证线性模组与水平面的垂直关系。
机械手自动对心装置3中对心转接件304安装在气动机械手101的端面,用于连接气动机械手101与浮动接头301,止动销钉306安装在对心转接件304侧面的销钉沉孔中,露出的止动销钉306部分应嵌入连接座的凹槽中,以此实现约束机械手主体1的周向转动,连接轴305用来连接浮动接头301与浮动接头支撑架302,连接轴305两端攻螺纹,中间段为光轴,连接轴305上端螺纹杆部分穿过浮动接头支撑架302,用螺母将浮动接头301固定在浮动接头支撑架302上,安装浮动接头301时,可先将顶丝307顶住连接轴305的光轴部分,以方便螺母的拧紧。气动机械手101在抓取定位光轴时,会利用浮动接头301的浮动余量,自动将气动机械手爪心与定位光轴轴心对齐,实现精准抓持。浮动接头301可根据实际需要选取合适的标准件。
本发明还包括控制系统4,控制系统包括人机界面(触摸屏)、PLC可编程控制器,电磁阀Ⅰ、电磁阀Ⅱ、光电传感器Ⅰ402、光电传感器Ⅱ403、光电传感器Ⅲ404和接近开关401,人机界面用于指令的输入与显示,可通过数据线与PLC可编程控制器相连,通过数据线将设定的参数输入到PLC可编程控制器中,PLC可编程控制器向驱动器、电磁阀发出脉冲指令,所述电磁阀Ⅰ和电磁阀Ⅱ分别控制气动机械手101的夹紧和松开动作,光电传感器Ⅰ402和光电传感器Ⅱ403分别限制线性模组上滑块运动的上下极位,光电传感器Ⅲ404所在位置为原点位置,是气动机械手101不工作时和机械手夹持定位光轴悬停位置,接近开关401安装在气动机械手101上,用于检测光轴位置并决定气动机械手101夹紧动作。当定位光轴将要影响引纬剑工作时,气动机械手101处于松开状态并从原点位置处下降,直到接近开关401检测到定位光轴时气动机械手停止向下运动同时PLC向电磁阀Ⅰ发出脉冲指令,气爪夹紧光轴,接着气动机械手101在Z向线性模组201的带动下向上运动到原点位置处停止,此时光轴下端到达压板处(压板位置固定),随之引纬剑开始工作,等到引纬剑工作完毕,PLC向电磁阀Ⅱ发出脉冲指令,气爪松开,定位光轴通过自身重力回到原位置,气动机械手部分一个控制循环结束。
本发明用于一种碳纤维三维织物编织机的辅助工作,实现了对软硬混编碳/碳复合材料预制体成型工装定位光轴的自动插拔工作,机械手自动对心,抓持平稳,线性平动系统精准控制,提高了编织机整机的自动化程度,减少编织机在工作中的人工干预,提高了整机工作流畅性,提高了产品质量,降低了人力成本,实用性强,便于推广使用。
以上对本发明的实例进行了详细说明,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,凡依本发明范围所作的变化与改进等,均仍属于本发明的保护之内。