基于元胞自动机模型的雾天高速公路协调控制方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及交通管理控制技术领域,特别涉及一种基于元胞自动机模型的雾天高速公路主线和匝道融合智能协调控制方法。
背景技术
雾天能见度较低极易造成交通事故,特别是速度较快的高速公路。传统上,高速公路管理部门在低能见度天气下采取各种措施,如能见度低于30m时关闭高速等方式来进行交通管制;但这种交通管控措施是粗线条的,存在以下问题:一是较多采用限速、封路等手段,部分将流量限制(分流引导)加入;二是虽然这些措施大体合理,但无法依据各路段几何线形、交通流特性、大数据样本,采用雾天交通流模型确定出更加精细化的工程技术标准进行智能化管控;三是分段协调控制较少,且采用同一标准的路段距离较长。
由于高速公路雾天时不同路段的能见度可能存在差别,使得采用相同的管理控制措施不能达到预想的目的,采用不同的管控措施又涉及到各个路段的协调问题。从安全角度,高速公路管理部门采用相对保守的控制措施,过大范围的高速封闭或过低的限速和流量限制等,在能见度稍大时,使高速公路交通量不必要的减少,大容量优势不能充分发挥;过低的限速使得车辆在高速行驶时间加长,增加了事故发生的风险;不必要的封路或过低的限流,使很多车辆在入口匝道长时间排队等待或转移到低级别道路上,造成这些本来已经拥挤的道路更加拥堵,事故率加大;另外,高速公路流量降低使得收费收入也大幅度下降,造成高速公路运营企业不必要的经济损失,以上这些在雾持续时间较长如2小时以上甚至6小时、10小时时尤为突出。因此,针对不同路段不同的能见度,采用不同的精细化融合管控措施,在保证交通安全前提下,实施准全天候高速公路通行,最大限度的提高其实际通行能力,已成为政府相关部门、高速公路管理部门和出行者迫切需要解决的技术问题之一。
现有关于雾天高速公路通行的研究技术主要分以下三个方面。
1)雾天高速公路最佳速度限制值或最优速度诱导方面
李长城(李长城.不良天气下的高速公路交通流特性及引导控制研究[D].北京:北京工业大学,2015.)提出一种不良天气下适合限速值的两步确定方法,首先确定气象与交通、道路因素下自由流速度,基于观测资料和通行能力速度-流量曲线,通过插值法确定新的速度-流量曲线,再通过查表确定特定流量下速度,作为实时推荐限速值;在此基础上提出跨区域跨部门路网协同联动机制,但不涉及具体控制模型与优化计算。王敏(王敏.高速公路常态性雾区行车智能诱导策略研究[D].重庆:重庆交通大学,2015.)分析高速公路雾区车辆运行与事故特征,以交通流理论为基础建立高速公路雾区速度、车距控制自适应神经网络模型,得到雾区行车智能诱导策略。张存保等(张存保,吕昌平,张珊,等.面向智能网联汽车的雾天环境下高速公路安全车速引导系统和方法:中国,106251666[P].2016-12-21.)提供一种面向智能网联汽车的雾天环境下高速公路安全车速引导系统,通过广域无线通信技术实现路侧设备和车载设备交互,将取得的实时能见度和本车状态信息发送给路侧设备,通过相关模块计算得到最佳车速。上述这种采用速度限制和速度诱导的方法存在的不足是:仅限于车辆主线速度的控制和诱导,不涉及入口匝道流量控制,也不涉及由多路段不同道路几何线形组成的高速公路在不同能见度下控制策略的协调问题。
2)雾天高速公路速度限制和流量控制一体化协调研究方面
龚玲艳等(龚玲艳,王可可,毛学军,等.雾天环境下高速公路交通控制方法[J].交通科学与工程,2017,31(1):85-90.)在交通流模型METANET基础上建立改进雾天高速公路交通流模型,构建以主线运行效率、匝道排队长度约束及行车安全性三者协调为目标的高速公路主线与匝道协调预测控制模型;其不足是不涉及“多路段不同道路几何线形及不同能见度”问题,由于采用宏观交通流模型,对于具体路段微观交通流行为无法映射,预测控制需建立在精确预测基础上,因此具有一定的局限性。徐锨锨等(徐锨锨,刘攀,王炜等.一种雾天状态下减少交通事故的车辆调控方法:中国,103198712[P].2013-07-10.)提出一种雾天减少交通事故的车辆调控方法,在获取事故路段信息、采集雾天下的事故样本基础上,建立初始雾天状况下的交通事故判别函数,依据该函数值判别是否出现交通事故,并进行速度限制和匝道调节;不足是仅适用于雾天出现事故后的控制问题,不适用于事故前控制。
3)基于元胞自动机模型(cellular automaton model,CAM)的雾天高速公路管理控制
庞明宝和郑莎莎(Pang Ming-bao,Zheng Sha-sha,Cai Zhang-hui.Simulationof three lanes one-way freeway in low visibility weather by possible trafficaccidents[J].PhysicaA,2015,433:161-170;郑莎莎.基于CAM的雾雨天气下高速公路控制信号施加策略研究[D].天津:河北工业大学,2015.10.)考虑到CAM在“克服跟驶模型局限性、描述交通流的非线性行为”等方面的优势,结合高速公路交通流和雾天驾驶员心理行为特性分析,建立雾天可能发生事故的一段1km的单向三车道直线高速公路CAM,以能见度为主要参数,通过调整交通需求(上游主线流量)和可变速度限制(Variable Speed Limits,VSL)值进行实验,得到协调控制信号施加策略。不足是研究对象仅限于一段1km的直线高速公路,未考虑到弯道、山区上下纵坡等高速路段、未考虑到单向2车道和4车道等情况;上游主线流量作为该路段的控制变量不符合实际(实际上只能通过上游单个或多个入口匝道才能调节控制变量),不涉及多入口匝道间协调问题,不涉及不同路段即使2个入口匝道间的不同路段间的协调问题。
发明内容
本发明需要解决的技术问题是提供一种基于元胞自动机模型的雾天高速公路主线和匝道融合智能协调控制方法,在保证交通安全的基础上,实现准全天候高速公路通行,最大限度的提高高速公路的实际通行能力。
为解决上述技术问题,本发明所采取的技术方案如下。
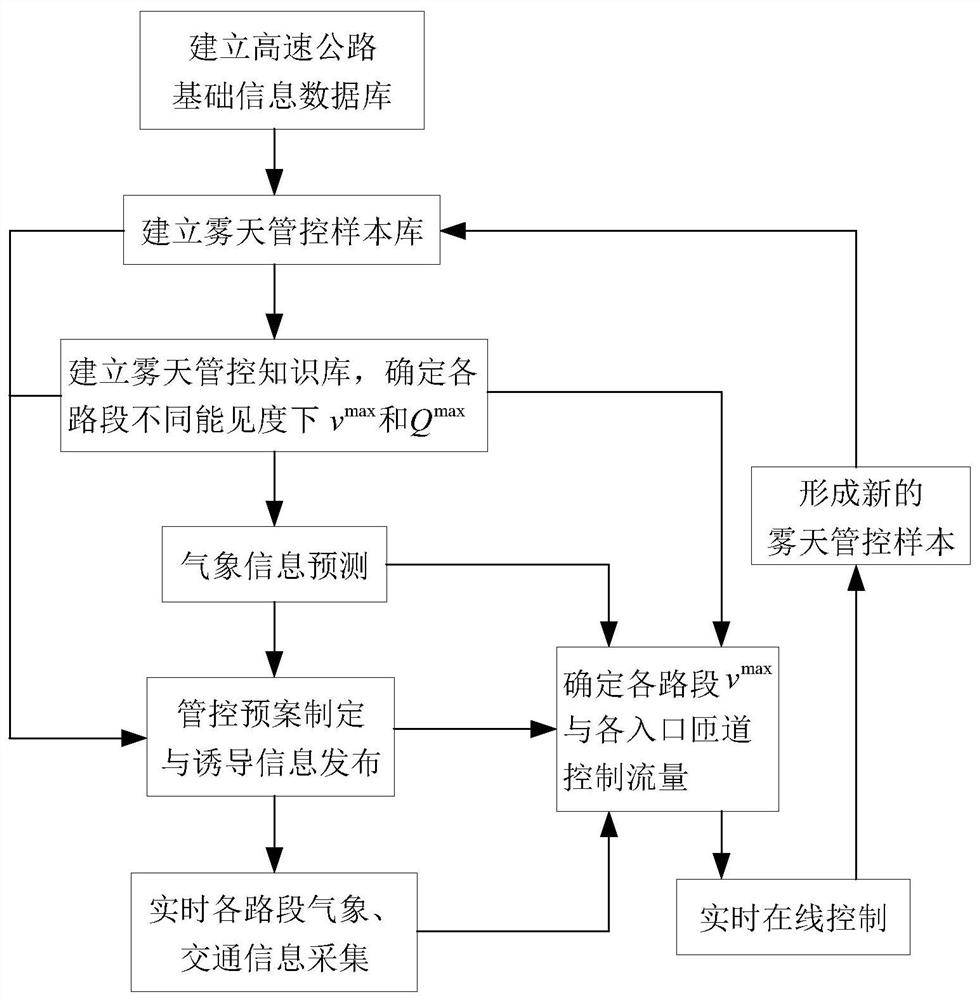
基于元胞自动机模型的雾天高速公路协调控制方法,主要包括以下步骤:
A.建立本高速公路基础信息数据库;
B.建立不同能见度下的雾天管控样本库;
C.对高速公路进行路段划分,建立每一路段的管控知识库,所述管理控制知识库中包含雾天不同能见度下主线的最大容许流量Q
D.对本高速公路未来几天即将出现的雾天能见度进行预测,制定管控预案,并提前发布交通诱导信息;
E.对高速公路具体出现的雾天,确定各路段速度限制上限v
F.形成新的雾天管控样本,返回步骤B和C,修正雾天管控样本库和相应路段的管控知识库。
上述基于元胞自动机模型的雾天高速公路协调控制方法,步骤A中所述的基础信息数据库中包含道路几何线形在内的GIS信息、交通流历史数据库、气象数据库以及信息采集装置实时采集的环境气象信息和道路交通状态信息。
上述基于元胞自动机模型的雾天高速公路协调控制方法,步骤C中对高速公路进行路段划分的具体方法为:将高速公路划分为若干子系统,若两个相邻上下游入口匝道间高速公路不含与其它高速交汇的互通立交桥,划分为一个子系统,若两个相邻上下游入口匝道间高速公路包含与其它高速交汇的互通立交桥,则以与其它高速交汇的互通立交桥为分界点,划分为两个子系统;最后将每个子系统依据道路几何线形,划分为若干路段。
上述基于元胞自动机模型的雾天高速公路协调控制方法,步骤C中所述的管控知识库的建立方法为:
C1.根据路段车道数、几何线形,建立该路段的交通流CAM模型;
C2.对该路段通过仿真实验、驾驶模拟实验以及实际统计数据进行比较分析,对交通流CAM模型进行校验,并修正模型中的相关参数;
C3.采用修正后的交通流CAM模型,通过实验确定该路段不同能见度下的最大容许流量Q
C4.遍历该路段的各能见度,形成该路段的管控知识库。
上述基于元胞自动机模型的雾天高速公路协调控制方法,步骤C1的建模方法为:
C11.路段元胞划分
路段每个车道长度L米被分为若干个元胞;元胞i要么空要么由速度是v的车辆据有,
定义v
x(i,t)与v(i,t)分别表示第i辆车在时间t的位置和速度;
d(i,t)为第i辆车在第t时刻与第i-1辆车间空的元胞数;其中d(i,t)
a1加速度,a2减速度,p1为路段换道概率,p随机慢化概率
最小安全距S
C12.制定车辆行驶基本规则;
C13.制定雾天行驶规则;
C14.制定追尾判断规则;
C15.制定纵坡规则;
C16.制定弯道规则;
C17.制定事故概率计算和事故率关系;
C18.制定边界条件。
上述基于元胞自动机模型的雾天高速公路协调控制方法,步骤E中所述的在线实时控制方法为:
E1.在线实时采集交通流、匝道需求和能见度信息,根据能见度等级细化路段;
E2.根据该路段管控知识库和能见度确定
E3.令所有路段按照对应的
E4.对第i个子系统,i从n开始:
a.若该子系统上游有“与其它高速交汇的互通立交桥”,转向e,否则转向b;
b.若
令r
其中
该条件表明当主线上游和匝道需求合计小于在该天气下子系统的最大容许流量,就不需要对该匝道进行限流,匝道来车可全部放入到高速中,同时也不需对上游子系统减少来车即可满足安全和流量最大化要求,转向E5;
c.若
令
该条件表明虽然主线上游和匝道需求合计大于在该天气下子系统的最大容许流量,但主线上游车辆较少,可通过对入口匝道减少放车满足安全和子系统流量最大化需求,但匝道放车和主线上游来车合计不能超过主线最大容许流量,同时也不需减少上游子系统来车,转向E5;
d.否则令r
该条件表明当主线上游来车大于子系统最大容许流量,使得本子系统入口匝道关闭,且还需要减少主线上游来车才能满足安全要求,具体通过减少上游子系统最大容许流量予以实现,转向E5;
e.若
令
该条件表明当主线上游需求和从其它高速的交通需求合计小于在该天气下子系统的最大容许流量,就不需对上游子系统减少来车即可满足安全和流量最大化要求,转向E5,否则转向E6;
f.若
令
其中β
该条件表明当主线上游需求和互通式立交桥的需求合计大于在该天气下子系统的最大容许流量,就需按所占比例减少上游来车才能满足安全和流量最大化要求,转向E5;
E5.令i=i-1,若i=i
E6.对i
a1.若
该条件表明当主线上游和匝道需求合计小于该天气下子系统最大容许流量,就不需对该子系统匝道进行调节,匝道来车可全部放入高速中,转向E1;
b1.若
该条件表明虽然主线上游和匝道需求合计大于在该天气下子系统最大容许流量,但主线上游车辆较少,可通过入口匝道调节满足安全需求,但匝道放入车辆和主线上游来车合计不能超过主线最大容许流量,同时也不需要减少上游子系统来车即可满足安全和流量最大化要求,转向E1;
c1.否则令r
r
该条件表明第一个有雾子系统主线上游来车大于其最大容许流量,使得本子系统入口匝道关闭,且还需减少主线上游来车,具体通过调节上游非雾天下各子系统入口匝道进车量实现,其中上游s个入口匝道关闭,第r
由于采用了以上技术方案,本发明所取得技术进步如下。
本发明从交通流微观模型建立角度,基于大数据样本确定各路段不同能见度下的最大速度限制值和最大容许上游流量,在此基础上,针对高速公路的能见度、广域雷达、视频信息等气象信息,并结合交通流检测和感知系统所采集的信息,迅速确定各路段最大限速值和协调后的各入口匝道流量,使各路段行驶车辆在最大限速值范围内,且路段上游来车不超过最大容许流量,保证了交通安全,最大限度的提高了高速公路的流量。
本发明与现有技术相比较存在的实质性特点如下。
1)本发明不同于已有雾天高速公路最佳速度限制值或最优速度诱导方式,本发明不仅针对不同路段和不同能见度实施不同限速措施,而且实现速度限制和多匝道调节融合协调控制方式,针对不同匝道实施不同限流措施,在尽可能减少封闭高速的基础上通过减少放车量和速度限制诱导进行协调,最大程度的保证了交通安全,实现了准全天候通行的目的,而这一措施特别适用于各个路段雾天程度不同的高速公路,更加符合高速公路管理实际。
2)在具体控制信号施加策略方面,本发明采用精细化控制方式,针对高速公路每一路段采用不同的最大速度限制值,对不同的入口匝道采用不同的精细化流量调节方式,使得高速公路能够最大程度的保证交通安全,同时道路通行能力得到最大发挥,最大限度减少“匝道入口排队等待、其它道路拥堵和高速公司收费收入减少”所带来的雾天负面影响。
3)适用对象方面,本发明适用于雾持续时间较长(如2小时以上甚至6小时、10小时)且因环境(如高速公路经过山区,及沿线湖泊、河流等地势影响)造成能见度分布不均匀、尚未达到封路标准的高速公路,如中国北方每年除夏季外普遍存在的从夜间到中午前大雾的情况,采用本发明控制成本低、效果好。
4)本发明采用CAM模型作为各路段不同能见度下最佳速度限制和通行能力确定的依据,通过建立含弯道、纵坡等在内不同道路几何线形在不同能见度下的微观交通流模型,通过实验和对比,确定不同能见度下的最佳限速值和通行能力。
附图说明
图1为本发明的流程图;
图2为本发明所述的由若干子系统组成的高速公路示意图;
图3为本发明所述的高速公路一个子系统的示意图,其中,(a)为不含与其它高速交汇互通立交桥的2个相邻上下游入口匝道间划分的一个子系统;(b)为包含,与其它高速交汇互通立交桥的2个相邻上下游入口匝道间并以互通立交桥为分界点划分的2个子系统;
图4为本发明中一个路段雾天管理控制技术标准确定的流程图;
图5为本发明中一个路段雾天元胞自动机模型建立的流程图;
图6为本发明中一个路段雾天元胞自动机模型校验和参数修正的流程图;
图7为本发明中所述在线子系统的控制流程图;
图8为本发明实施例中沧榆高速阜平东至保定西段的地图;
图9为本发明实施例中子系统划分示意图;
图10为本发明实施例中实际与驾驶模拟、模型仿真的密度-流量对比图。
具体实施方式
下面将结合附图和具体实施方式对本发明进行进一步详细说明。
一种基于元胞自动机模型的雾天高速公路协调控制方法,以多入口匝道和出口匝道、主线、与其它高速交汇的互通立交桥等组成的一条高速公路以及能见度检测设备、广域雷达、视频采集设备构成高速公库系统为应用对象,实现其在雾天下的主线和匝道融合协调控制,以在保证行车安全的基础上,提高高速公路通行能力。
该方法的流程图如图1所示,主要包括以下步骤:建立本高速公路基础数据库,采集并建立不同雾天(能见度下)高速公路车流量、速度等,及事故地点、原因等数据样本库;由若干路段组成的子系统,建立各路段交通流CAM模型,通过模型校验、参数标定、实验等,确定每一路段“不同低能见度下主线最大容许流量和速度限制上限融合”的管理控制知识库;依据气象台等提供的信息,对本高速公路未来几天即将出现的雾天能见度进行预测,制定各种预案,并提前发布交通诱导信息;对高速公路出现的雾天,采集能见度并在线实时控制;然后将其作为雾天管控样本,修正知识库。详细步骤如下所述。
A.建立本高速公路基础信息数据库。基础信息数据库中包含道路几何线形在内的GIS信息、交通流历史数据库、气象数据库以及信息采集装置实时采集的环境气象信息和道路交通状态信息;信息采集装置主要包括能见度传感器、广域雷达系统、道路摄像机、电话等。
B.建立不同能见度下的雾天管控样本库;
其中雾天管控样本库中包含了高速公路车流量、汽车行驶速度以及事故地点和事故原因等信息。
C.对高速公路进行路段划分,建立每一路段的管控知识库,所述管理控制知识库中包含雾天不同能见度下主线的最大容许流量Q
本步骤中,对高速公路进行路段划分的具体方法为:将高速公路划分为若干子系统,若两个相邻上下游入口匝道间高速公路不含与其它高速交汇的互通立交桥,划分为一个子系统,如图2和图3(a)所示;若两个相邻上下游入口匝道间高速公路包含与其它高速交汇的互通立交桥,则以与其它高速交汇的互通立交桥为分界点,划分为两个子系统,如图2和图3(b)所示;最后将每个子系统依据道路几何线形划分为若干路段。
其中道路几何线形可划分为直线、弯道、下纵坡、下纵坡弯道、上纵坡、上纵坡弯道和隧道,其中纵坡和弯道前可有少量长度的直线,再按车道分为单向二车道、单向三车道、单向四车道,其中隧道作为特殊路段,不受雾天影响,立交桥和出入口匝道依据具体道路线形再分为若干路段。
图2和图3中所示的q
本步骤中所述的管控知识库的建立方法如图4,具体方法如下。
C1.根据路段车道数、几何线形,建立该路段的交通流CAM模型,确定加速、减速、随机慢化、换道、位置状态更新等在内的演化规则,确定事故判别规则以及入口、出口边界条件和事故概率、路段交通流状态变量统计等的计算公式。
交通流CAM模型的建立方法如图5所示,具体为。
C11.路段元胞划分,路段每个车道长度L米被分为若干个元胞,各元胞长度相等,如1米;元胞i要么空要么由速度是v的车辆据有,v取0,1,2,…,v
定义:v
x(i,t)与v(i,t)分别表示第i辆车在时间t的位置和速度;
d(i,t)为第i辆车在第t时刻与第i-1辆车间空的元胞数;其中d(i,t)
a1加速度,a2减速度,p1为路段换道概率,p随机慢化概率
最小安全距S
C12.制定车辆行驶基本规则
加速,v(i,t+1)=min(v(i,t)+a1,v
减速,Case1:ifd(i,t)>S
Case2:if d(i,t)≤S
随机慢化,v(i,t+1)=max(v(i,t)–1,0),表明因各种不确定性因素车辆以概率p随机慢化。
运动,x(i,t+1)=x(i,t)+v(i,t+1),表明车辆按照调整后的速度等位置更新。
换道,d(i,t) 其中,rand() C13.制定雾天行驶规则 在能见度为visibility的雾天,驾驶员会打开雾灯来增加视距,所以实际视距要比能见度值稍大一些,定义实际视距为1.1倍能见度值。 当车i满足条件d(i,t)>1.1×visibility(表示前车在驾驶员的实际视距范围外),或者d(i,t)≤1.1×visibility,d(i,t)>S 当车i满足条件d(i,t)≤1.1×visibility(表示驾驶员看到前车),d(i,t)≤S v(i,t+T v(i,t+T 当车i满足条件d(i,t)≤1.1×visibility(表示驾驶员看到前车),d(i,t)≤S v(i,t+1)=max(v(i,t)-D2 C14.制定追尾判断规则 当T C15.制定纵坡规则 车辆在纵坡路段行驶时驾驶员为保持安全存在各自期望速度V 另外,大货车在长下纵坡路段,驾驶员为保持安全速度而采取制动减速措施时,摩擦生热使得制动鼓温度上升,可能达到制动失效的温度,酿成制动事故,对大货车在所有路段(包括上下纵坡、弯道前、弯道等),若记录的动鼓温度达到制动失效临界值时,将发生制动失效,制动事故数加1,具体制动鼓温度计算和制动失效临界值确定等参见贾伟制动器温升与山区道路参数及车辆工况关系研究。 C16.制定弯道规则 车辆在弯道行驶受离心力影响,使其行驶存在不稳定状态,可能出现由于离心力较大而发生侧滑等事故,对此设置车辆通过弯道的最大安全速度v
其中R为弯道半径,i 在弯道前缓冲路段规则,驾驶员为避免车辆发生侧向失稳事故,需在缓冲路段尽可能减速到弯道限制的安全速度内。 当v<=v 当v>v 采用弯道演化规则对进入弯道内的车辆每一仿真步,进行判断:如果v<=v 对大货车在含弯道在内的长纵坡路段,出现的制动失效,失效后车辆将换至内侧车道后再换至避险车道,具体换道规则同步骤C12,在避险车道入口处该车从主线车道上消失。 C17.制定事故概率计算和事故率关系 事故概率表示该仿真时长内在该仿真路段上每辆车可能发生交通事故的概率,定义为N 交通工程中事故率如亿车公里事故率指一年中每一亿车公里的事故次数,是大量统计数值,其与本专利事故概率的关系与具体计算见张杉等在《中国安全科学学报》发表的《冰雪道路环境下交通流微观仿真及事故率研究》,2020,30(1):148-154一文。 C18.制定边界条件 本发明中的边界条件包括入口边界和出口边界。 入口边界的设置方法为:根据研究路段实际上游交通量,按随机概率抵达上游入口边界,其中左车道为小汽车,右车道为大货车,若有中间车道为混合车道(单向三车道高速)、靠左为小汽车靠右为大货车(单向四车道高速)。若每个车道上最左端单位元胞对应为A=1,最左端车辆标记为A 出口边界的设置方法为:若A 本步骤中制定的C12和C18为基础规则,其中C12、C15、C16为在正常天气条件下根据路段线形(地形)不同所制定的规则,如直线平面C12即可满足,弯道平面C12附加C15即可满足,纵坡弯道C12需附加C15和C16,具体根据地形定;其次,在雾天情形下需要附加C13规则,如雾天的弯道纵坡路段需C12、C15、C16并附加C13;最后考虑交通安全加入C14和C17来判断当车辆是否出现意外事故,以及事故概率等相关计算。 C2.通过对该路段进行仿真实验、驾驶模拟实验,获得两种实验过程中产生的交通流特性和事故率,结合实际统计数据进行比较分析,判断交通流CAM模型获得的结果是否在误差范围内,并根据误差值对交通流CAM模型进行校验,修正模型中的相关参数,具体流程如图6所示。 C3.采用修正后的交通流CAM模型,通过实验确定该路段不同能见度下的最大容许流量Q C4.遍历该路段的各能见度,形成该路段的管控知识库。 D.对本高速公路未来几天即将出现的雾天能见度进行预测,制定管控预案,并提前发布交通诱导信息。 E.对高速公路具体出现的雾天,确定各路段速度限制上限v 本步骤中在线实时控制方法如图7所示,具体为。 E1.依据能见度传感器、广域雷达及视频等设备,在线实时采集交通流、匝道需求和能见度信息,对步骤C划分好的路段根据能见度等级进行细化,若能见度相同,将不再细化,若能见度不同,原来路段依据能见度的不同进一步细化为若干路段。 E2.根据该路段管控知识库和能见度确定 E3.令所有路段按照对应的 E4.对第i个子系统,i从n开始: a.若该子系统上游有“与其它高速交汇的互通立交桥”,转向e,否则转向b; b.若 令r 其中 该条件表明当主线上游和匝道需求合计小于在该天气下子系统的最大容许流量,就不需要对该匝道进行限流,匝道来车可全部放入到高速中,同时也不需对上游子系统减少来车即可满足安全和流量最大化要求,转向E5; c.若 令 该条件表明虽然主线上游和匝道需求合计大于在该天气下子系统的最大容许流量,但主线上游车辆较少,可通过对入口匝道减少放车满足安全和子系统流量最大化需求,但匝道放车和主线上游来车合计不能超过主线最大容许流量,同时也不需减少上游子系统来车,转向E5; d.否则令r 该条件表明当主线上游来车大于子系统最大容许流量,使得本子系统入口匝道关闭,且还需要减少主线上游来车才能满足安全要求,具体通过减少上游子系统最大容许流量予以实现,转向E5; e.若 令 该条件表明当主线上游需求和从其它高速的交通需求合计小于在该天气下子系统的最大容许流量,就不需对上游子系统减少来车即可满足安全和流量最大化要求,转向E5,否则转向E6; f.若 令 其中β 该条件表明当主线上游需求和互通式立交桥的需求合计大于在该天气下子系统的最大容许流量,就需按所占比例减少上游来车才能满足安全和流量最大化要求,转向E5; E5.令i=i-1,若i=i E6.对i a1.若 该条件表明当主线上游和匝道需求合计小于该天气下子系统最大容许流量,就不需对该子系统匝道进行调节,匝道来车可全部放入高速中,转向E1; b1.若 该条件表明虽然主线上游和匝道需求合计大于在该天气下子系统最大容许流量,但主线上游车辆较少,可通过入口匝道调节满足安全需求,但匝道放入车辆和主线上游来车合计不能超过主线最大容许流量,同时也不需要减少上游子系统来车即可满足安全和流量最大化要求,转向E1; c1.否则令r
r
该条件表明第一个有雾子系统主线上游来车大于其最大容许流量,使得本子系统入口匝道关闭,且还需减少主线上游来车,具体通过调节上游非雾天下各子系统入口匝道进车量实现,其中上游s个入口匝道关闭,第r F.最后形成新的雾天管控样本,返回步骤B和C,修正雾天管控样本库和相应路段的管控知识库。 本实施例的试验地点选取沧榆高速河北省的阜平东至保定西段,具体见图8和9所示。图中P为入口匝道,R为出口匝道,I为互通式立交桥入口,E为互通式立交桥出口;数字序号代表子系统编号。 该段路含6个出入口匝道对(一个入口匝道对应一个出口匝道)和2个与其它高速公路联通的互通式立交桥。主线双向四车道,长度106公里。整个道路分为从阜平东-唐县的山区、唐县到京昆高速的丘陵、京昆高速到保定西的平原三部分,其中丘陵和山区弯道和下纵坡较多,特别是山区段;丘陵地段由于有河流,雾天能见度最低,山区由于风较大,雾天时能见度较高。依据调查,货车比例为35%左右。 按照本发明步骤C所述的方法对该高速公路进行划分,分为7个子系统,具体范围见表1和图8所示。各子系统按照道路几何线形再细划为若干路段,其中子系统4和5细划后的路段特征见表2和3所示,表中的设计车速为晴天正常交通状态下(非拥堵和事故、修路等事件下)的固定最大限速值,其中小车、大车限速值上限,子系统4为100km/h、70km/h,子系统5(丘陵)和子系统6、7(平原)均为120km/h、90km/h。 表1实施例试验地点-沧榆高速阜平东至保定西
表2子系统4细分各路段基本特征
表3子系统5细分各路段基本特征
建立细分后的各子系统每一个路段的CAM,并依据各种统计数据、国家和有关部门相关标准对模型进行校验和参数修正。 图10为子系统4路段1在能见度120m、小车和大车最大限速值分别为50km/h和40km/h、比例分别为0.6-0.7和0.3-0.4、交通量分别为720veh/h-750veh/h和380veh/h-410veh/h情况下,模型仿真、驾驶模拟与实际统计数据所得雾天高速公路密度-流量基本图比较。可看出,三条曲线基本吻合,而且曲线走向基本一致,从而验证了本发明中CAM模型的有效性。 国家相关宏观统计、该路段在不同雾天实际统计的0.76-230次/(亿车·km),在该能见度下经换算得事故概率范围为0.209‰-0.376‰次/(veh·km·h),模型仿真和驾驶模拟中事故概率折合为标准为0.216‰-0.392‰次/(veh·km·h)和0.212‰-0.397‰次/(veh·km·h),偏差在合理范围内,进一步验证了本发明中CAM模型的有效性。 表4为标定后的模型参数,本路段其它交通条件和能见度下,其它各路段不同交通条件和能见度下同。 表4标定后的模型参数
采用标定后的各路段CAM模型进行实验,建立不同路段下的雾天管控样本库,表5-7为部分路段的雾天管控样本库(其它路段同)。 表5子系统4路段2的雾天管理控制技术标准
表6子系统4路段4的雾天管理控制技术标准
表7子系统5路段2的雾天管理控制技术标准
第一次在线实施,选择一天能见度较小但尚未达到封路为例,该例中雾持续时间由早上5点至上午11点共6个小时,能见度各子系统和子系统各路段不同,其中各个子系统能见度范围分别为150m-110m、110m-90m、90m-80m、80m-50m、50m-30m,表8和9为子系统4和5中各路段能见度。 表8第一次在线实施子系统4各路段的限速值和最大容许流量
表9第一次在线实施子系统5各路段的限速值和最大容许流量
依据本发明步骤D所述的方法,提前做好预案和提供相关诱导信息。 按照本发明步骤B和C中获得的雾天管理控制具体技术标准、具体能见度确定出各路段的速度限制值和容许最大流量(部分路段见表8和9);按照本协调控制方法,确定出各子系统最大容许流量、入口匝道放车量、其它高速放车量控制变量值见表10所示,其中子系统4和5各路段最大速度限制值见表8和9所示,其它子系统路段同。 表10第一次在线实施子系统协调流量控制值(veh/h)
计算出的控制效果见表11所示,表11中列举出本发明与已有方法进行比较的结果。其中,不控制即实行正常天气下限速值;现国家标准是依据现国家标准方法确定出的限速值,并根据道路交通状况提供简单的流量控制;龚玲艳提出的主线和匝道协调采用预测控制方法。控制的参数包括车流量、匝道排队长度和事故概率。 表11第一次在线实施各控制方法效果对比
从表11的结果,可以看出:若不控制,事故概率非常高,同时由于事故造成拥堵的影响,使得匝道排队长队平均值和最高值都非常大,高速公路的流量也将大幅度下降。用现国家控制标准,由于该标准线条较粗,不能针对具体路段采用具体限速值和流量限制措施,使得管控措施相对保守,虽然事故概率虽然得到大幅度降低,但流量下降也非常大,匝道排队长队平均值和最高值依然都非常大。采用龚艳玲主线和匝道协调方法,虽然各项指标都得到改进,但由于“多路段不同道路几何线形及不同能见度不涉及,具体路段微观交通流行为无法映射,预测控制需建立在精确预测基础上”问题,使得各项指标尚未达到最优效果。 本发明与不控制方式、现国家标准、龚艳玲主线和匝道协调方法事故概率分别降低0.80‰,0.34‰,0.07‰,流量分别提高207veh/h、85veh/h、36veh/h,匝道平均排队长度分别减少66veh、39veh、18veh,匝道最大排队长度分别减少131veh、65veh、34veh,控制效果明显。 第二次在线实施,选择一天能见度较大为例,雾持续时间由早6点至上午10点共4个小时,能见度各路段不同,其中各个子系统能见度范围分别为300m-250m、250-205m、205m-190m、190m-160m、160m-120m,表12和13为子系统4和5中各路段能见度。 表12第二次在线实施子系统4各路段的限速值和最大容许流量
表13第二次在线实施子系统5各路段的限速值和最大容许流量
依据发明步骤D所述的方法,提前做好预案和提供相关诱导信息。 按照本发明步骤B和C中获得的雾天管理控制具体技术标准、具体能见度确定出各路段的速度限制值和容许最大流量(部分路段见表12和13);按照本协调控制方法,确定出各子系统最大容许流量、入口匝道放车量、其它高速放车量控制变量值见表14所示,其中子系统4和5各路段最大速度限制值见表12和13所示,其它子系统路段同。 表14第二次在线实施子系统流量协调控制值(veh/h)
计算出的控制效果见表15所示。 表15第二次在线实施各控制方法效果对比
从表15可以看出:采用本发明方法与不控制方式、现国家标准、龚艳玲协调方法事故概率分别降低0.43‰、0.17‰、0.04‰,流量分别提高337veh/h、154veh/h、33veh/h,匝道平均排队长度分别减少57veh、42veh、33veh,匝道最大排队长度分别减少114veh、72veh、55veh,控制效果明显。这进一步证明了本控制方法的有效性。 结合两次在线实施的事故概率统计,可以看到本发明的指标值得到大幅度降低,减少到低于正常事故概率也远低于雾天实际统计事故率范围,从而验证了本专利用于保证交通安全的有效性;特别是当雾气较轻时,效果尤为明显。从而进一步证明了本发明在能见度为30m-300m的状态下均可在保证交通安全的前提下使得道路交通流量得到提高,进而减少匝道的平均和最大排队长度。 总起来说,本发明通过交通流CAM的建立、试验等离线方式确定模型,再通过在线控制模块快速确定控制信息实施管理;当本雾天结束后,将该管理控制案例作为样本,修正交通流CAM并更新模型。采用此种方式作为高速公路的智慧控制方式,符合人工智能的特点,符合实际且切实可行,控制效果好。 以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 基于元胞自动机模型的雾天高速公路协调控制方法
- 基于车路、车车通信的高速公路施工区交通协调控制方法