一种叶片腔体腹板翻转工装
文献发布时间:2024-01-17 01:16:56
技术领域
本发明涉及风电叶片技术领域,尤其涉及一种叶片腔体腹板翻转工装。
背景技术
大量化石能源的利用在推动技术发展的同时也增加地球生态环境的负担,大气污染威胁着人类的生命和健康,可再生能源逐渐成为优先选择的能源,在各国能源结构中占据着越来越重要的地位。风能作为一种可再生能源形式,具有开发成本较低、技术成熟、分布广泛等优点,成为近年来可再生能源发展的重点方向。
为了充分利用风能资源,风力发电机也逐步走向大型化,其叶片长度也不断增加,而风资源丰富的地区往往是一些偏远山区、荒漠地带、海上或海边等人迹较少的地区,交通条件差,运输长叶片相当困难。由此可见,风力发电机大型化受到运输条件的制约,因此模块化的风电叶片技术逐渐发展。
在制备风电叶片的模块时,需要将叶片腔体腹板先进行预制,并将腹板从模具中脱离,再与其他模块进行组装,而由于腹板两端存在凸起的翼缘,脱模时的角度与组装时的角度不同,这涉及到需要将腹板进行翻转。现有技术中的翻转方式是直接使用行车、吊带并配合人工辅助对腹板进行翻转,这种传统的翻转方式同步性差,会扭曲腹板,有导致腹板连接处开裂和腹板变形的风险,并且需要人工辅助吊装翻转过程中存在安全隐患。
公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
发明内容
本发明提供了一种叶片腔体腹板翻转工装,从而有效解决背景技术中的问题。
为了达到上述目的,本发明所采用的技术方案是:一种叶片腔体腹板翻转工装,包括:
两支座,两所述支座对称设置,且中间包括一间距;
若干翻转机构,若干所述翻转机构设置于两所述支座之间,若干所述翻转机构对腔体腹板的不同位置进行夹紧,并同步翻转;
导向机构,所述导向机构分别设置于两所述支座上,所述导向机构包括折叠状态与展开状态,所述导向机构位于展开状态时,对腔体腹板送入或送出若干所述翻转机构的横向运动进行导向,所述导向机构位于折叠状态时,对腔体腹板的翻转进行避让。
进一步地,所述翻转机构包括:
翻转框架,所述翻转框架竖直设置,所述翻转框架上设置有若干翻转导轮,若干所述翻转导轮圆心位于同一圆上;
翻转盘,所述翻转盘上设置有翻转导轨,所述翻转导轮与所述翻转导轨相互配合,所述翻转盘可进行周向运动;
驱动组件,所述驱动组件驱动所述翻转盘进行周向运动;
夹紧组件,所述夹紧组件固定设置于所述翻转盘上,对腔体腹板进行夹紧。
进一步地,所述翻转盘包括两圆弧段,两所述圆弧段对称设置,两所述圆弧段上分别设置有第一伸缩机构,两所述第一伸缩机构共同对腔体腹板进行夹紧。
进一步地,所述驱动组件包括:
直线模组,所述直线模组设置于所述翻转框架上,且垂直于腔体腹板送入所述翻转机构时的运行方向;
电动索盘,所述电动索盘设置于所述直线模组上,由所述直线模组驱动其进行直线运动;
拉索,所述拉索一端设置于所述电动索盘内,另一端与其中一所述圆弧段连接,所述电动索盘驱动所述拉索在所述电动索盘外的长度;
其中,对腔体腹板进行翻转时,所述电动索盘先收卷使所述拉索变短,所述直线模组再驱动其横向移动,当腔体腹板翻转90度之后,所述电动索盘再放卷使所述拉索变长,使腔体腹板继续翻转至180度。
进一步地,所述拉索与所述圆弧段连接处位于所述圆弧段的其中一端。
进一步地,所述翻转框架顶端设置有水平检测相机和采集相机;
所述水平检测相机对翻转后的腔体腹板水平状态进行检测;
所述采集相机在腔体腹板送入或送出若干所述翻转机构时,对腔体腹板表面状态进行检测。
进一步地,所述导向机构包括:
转动设置于所述支座上的若干活动支架,若干所述活动支架在其中一端设置有支撑滚轮;
第二伸缩机构,所述第二伸缩机构驱动所述活动支架进行旋转;
所述活动支架向远离所述支座的方向旋转时,所述导向机构位于所述展开状态,所述支撑滚轮对腔体腹板进行支撑和导向,所述活动支架向靠近所述支座的方向旋转时,所述导向机构位于所述折叠状态,对腔体腹板的翻转进行避让。
进一步地,所述活动支架包括若干组,每组的所述活动支架之间设置有连杆,所述连杆两端分别与两所述活动支架转动连接,一组所述活动支架通过一个所述第二伸缩机构驱动。
进一步地,所述支座上还设置有限位机构,所述限位机构包括:
第三伸缩机构及限位框架,所述限位框架固定设置于所述第三伸缩机构上,当腔体腹板送入或送出若干所述翻转机构时,所述第三伸缩机构驱动所述限位框架向远离所述支座的方向运动,对腔体腹板垂直于运动方向的两端进行限位。
本发明的有益效果为:本发明通过设置两支座、若干翻转机构和导向机构,导向机构包括折叠状态与展开状态,当导向机构位于展开状态时,对腔体腹板送入或送出翻转机构的横向运动进行导向,然后导向机构再进入折叠状态,为腔体腹板的翻转进行避让,若干翻转机构对腔体腹板的不同位置进行夹紧,然后同步翻转,防止腔体腹板在翻转过程中同步性差造成腹板的扭曲、开裂和变形的风险,且避免了人工辅助吊装翻转过程中存在的安全隐患。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
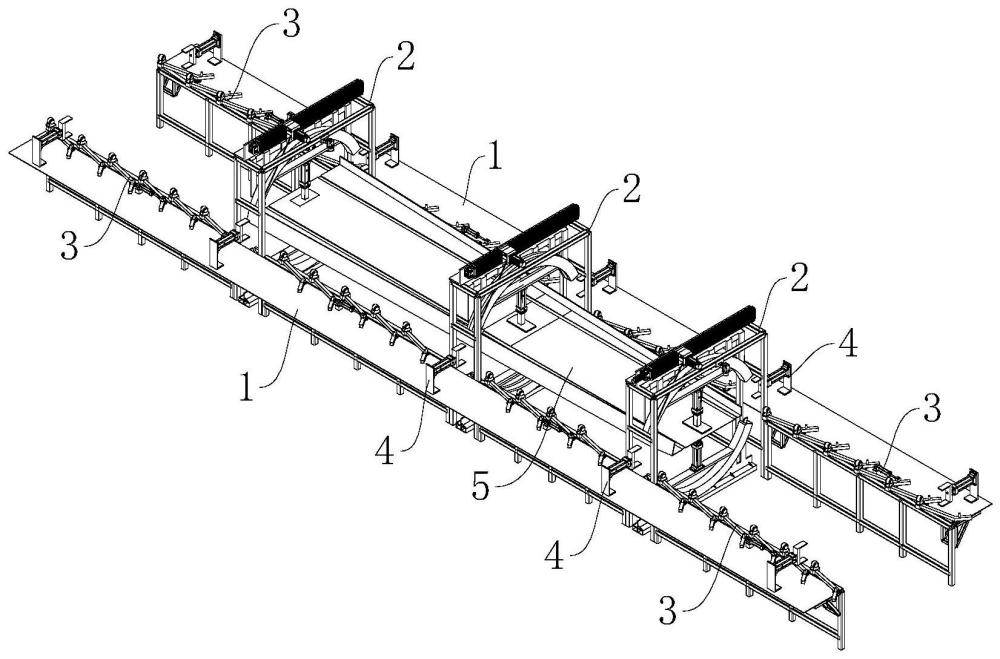
图1为本发明的结构示意图;
图2为图1中的正面视图;
图3为翻转机构的结构示意图;
图4为翻转导轨的结构示意图;
图5为驱动组件的结构示意图;
图6为翻转框架的侧面视图;
图7为导向机构的结构示意图;
图8为限位机构的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要说明的是,属于“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或者位置关系为基于附图所示的方位或者位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如可以是固定连接,也可以是可拆卸连接,或一体式连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以是通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
如图1至8所示:一种叶片腔体腹板翻转工装,包括:
两支座1,两支座1对称设置,且中间包括一间距;
若干翻转机构2,若干翻转机构2设置于两支座1之间,若干翻转机构2对腔体腹板的不同位置进行夹紧,并同步翻转;
导向机构3,导向机构3分别设置于两支座1上,导向机构3包括折叠状态与展开状态,导向机构3位于展开状态时,对腔体腹板送入或送出若干翻转机构2的横向运动进行导向,导向机构3位于折叠状态时,对腔体腹板的翻转进行避让。
通过设置两支座1、若干翻转机构2和导向机构3,导向机构3包括折叠状态与展开状态,当导向机构3位于展开状态时,对腔体腹板送入或送出翻转机构2的横向运动进行导向,然后导向机构3再进入折叠状态,为腔体腹板的翻转进行避让,若干翻转机构2对腔体腹板的不同位置进行夹紧,然后同步翻转,防止腔体腹板在翻转过程中同步性差造成腹板的扭曲、开裂和变形的风险,且避免了人工辅助吊装翻转过程中存在的安全隐患。
在对腔体腹板进行翻转时,先将腔体腹板吊装到对应位置,然后将导向机构3展开,将腔体腹板放在导向机构3上,再将腔体腹板送入翻转机构2,翻转机构2对腔体腹板进行夹紧,然后导向机构3再折叠避免干涉,此时翻转机构2进行同步翻转,翻转后导向机构3再展开,同时翻转机构2松开腔体腹板,腔体腹板再沿导向机构3运动至吊装位置,等待吊装进入下一步工序。
在本实施例中,翻转机构2包括:
翻转框架21,翻转框架21竖直设置,翻转框架21上设置有若干翻转导轮211,若干翻转导轮211圆心位于同一圆上;
翻转盘22,翻转盘22上设置有翻转导轨221,翻转导轮211与翻转导轨221相互配合,翻转盘22可进行周向运动;
驱动组件23,驱动组件23驱动翻转盘22进行周向运动;
夹紧组件24,夹紧组件24固定设置于翻转盘22上,对腔体腹板进行夹紧。
通过设置翻转框架21、翻转盘22、驱动组件23和夹紧组件24,翻转框架21上设置若干个翻转导轮211,翻转导轮211圆心位于同一圆上,将翻转盘22上对应设置有圆弧形的翻转导轨221,从而翻转导轮211与返还导轨相互配合,翻转盘22可以进行周向的运动,将夹紧组件24设置在翻转盘22上,对腔体腹板进行夹紧,从而翻转盘22周向的旋转时,带动腔体腹板进行翻转。
其中,翻转盘22包括两圆弧段222,两圆弧段222对称设置,两圆弧段222上分别设置有第一伸缩机构241,两第一伸缩机构241共同对腔体腹板进行夹紧。
两个圆弧段222之间可以作为腔体腹板进入时的避让,所以两个圆弧段222之间的距离需要小于圆弧段222的长度,圆弧段222在旋转到对应的翻转导轮211之间时,能够插入另一组的翻转导轮211,从而不会与翻转导轮211脱离,通过两个第一伸缩机构241对腔体腹板共同夹紧,从而使两个圆弧段222和腔体腹板组成一个整体,驱动组件23只需驱动其中一个圆弧段222即可使整体进行翻转。
作为上述实施例的优选,驱动组件23包括:
直线模组231,直线模组231设置于翻转框架21上,且垂直于腔体腹板送入翻转机构2时的运行方向;
电动索盘232,电动索盘232设置于直线模组231上,由直线模组231驱动其进行直线运动;
拉索233,拉索233一端设置于电动索盘232内,另一端与其中一圆弧段222连接,电动索盘232驱动拉索233在电动索盘232外的长度;
其中,对腔体腹板进行翻转时,电动索盘232先收卷使拉索233变短,直线模组231再驱动其横向移动,当腔体腹板翻转90度之后,电动索盘232再放卷使拉索233变长,使腔体腹板继续翻转至180度,拉索233与圆弧段222连接处位于圆弧段222的其中一端。
由于腔体腹板的翻转需要旋转180度,而普通的驱动机构在180度的旋转过程中,会与腔体腹板产生干涉,通常需要设置多组,来实现180度的翻转,而本实施例中通过设置直线模组231,来提供直线运动,直线模组231上设置电动索盘232,电动索盘232带动拉索233,拉索233与其中一个圆弧段222连接,所以在需要对腔体腹板进行翻转时,直线模组231先位于其中一端,电动索盘232慢慢拉动拉索233,使拉索233变短,拉着翻转机构2慢慢旋转,当拉索233长度短到不方便拉动时,顶部的直线模组231向另一端运动,让翻转机构2继续翻转,当拉索233与圆弧段222连接处翻转到另一端时,此时旋转了90度,此时电动索盘232再慢慢放松拉索233,使拉索233变长,从而翻转机构2继续翻转,直到翻转到180度,电动索盘232停止。
在本实施例中,翻转框架21顶端设置有水平检测相机25和采集相机26;
水平检测相机25对翻转后的腔体腹板水平状态进行检测,如果腔体腹板不是处于水平状态,则控制直线模组231和电动索盘232,对腔体腹板的角度进行调整,直至其位于水平状态。
采集相机26在腔体腹板送入或送出若干翻转机构2时,对腔体腹板表面状态进行检测,在腔体腹板进行横向运动时,对腔体腹板表面进行检测,判断表面是否有多余的划痕或者污渍,如果表面存在划痕或者污渍,则后续对其进行处理。
其中,导向机构3包括:
转动设置于支座1上的若干活动支架31,若干活动支架31在其中一端设置有支撑滚轮311;
第二伸缩机构32,第二伸缩机构32驱动活动支架31进行旋转;
活动支架31向远离支座1的方向旋转时,导向机构3位于展开状态,支撑滚轮311对腔体腹板进行支撑和导向,活动支架31向靠近支座1的方向旋转时,导向机构3位于折叠状态,对腔体腹板的翻转进行避让。
活动支架31包括若干组,每组的活动支架31之间设置有连杆33,连杆33两端分别与两活动支架31转动连接,一组活动支架31通过一个第二伸缩机构32驱动。
通过将活动支架31转动设置,不同的转动位置,来实现展开状态和折叠状态的转换,活动支架31的端部设置支撑滚轮311,腔体腹板放在活动支架31上时,支撑滚轮311对腔体腹板进行支撑,且方便其横向移动,通过将活动支架31分成若干组,每组的活动支架31之间设置连杆33,将活动支架31连成一个整体,使得一个第二伸缩机构32即可驱动一组的活动支架31,减少物料设置。
作为上述实施例的优选,支座1上还设置有限位机构4,限位机构4包括:
第三伸缩机构41及限位框架,限位框架固定设置于第三伸缩机构41上,当腔体腹板送入或送出若干翻转机构2时,第三伸缩机构41驱动限位框架向远离支座1的方向运动,对腔体腹板垂直于运动方向的两端进行限位。
通过设置限位机构4,来对腔体腹板在横向送入和送出翻转机构2时的左右两端进行限位,防止其偏转,保证翻转的同轴性,防止腔体腹板的扭曲。
本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。