一种自动泊车车辆控制方法、装置及计算机系统
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及自动泊车技术领域,特别是涉及一种自动泊车车辆控制方法、装置及计算机系统。
背景技术
现有技术方案自动泊车过程中,当车位前方带路沿(坎)时,车辆泊车时车轮遇到路沿,车辆后退的扭矩不够时,车辆上不去路沿,导致自动泊车失败。同时当车位中存在限位器,自动泊车过程中,车辆上安装的摄像头和超声波雷达未识别到限位器,车辆泊车后退过程中会猛烈撞击限位器,甚至越过限位器,存在安全隐患。
发明内容
本发明的目的是为了克服上述背景技术的不足,提供一种自动泊车车辆控制方法、装置及计算机系统,使其能做到顺利泊车入位。
本发明提供的一种自动泊车车辆控制方法,包括带限位器车位泊入策略,所述带限位器车位泊入策略如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当车辆车轮碰到限位器后,迅速减小扭矩,避免车轮撞击限位器甚至越过限位器,完成车辆泊车。
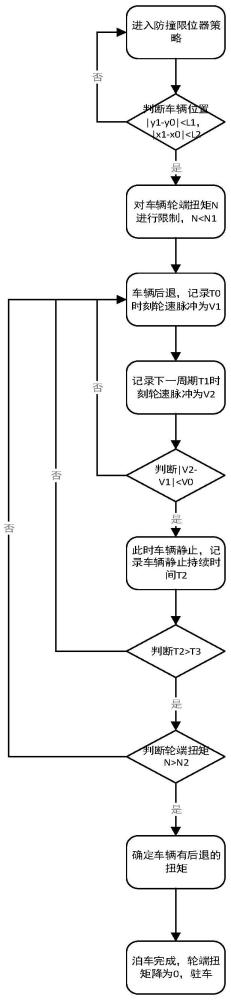
在上述技术方案中,所述带限位器车位泊入策略的方法如下:判断车辆正在后退过程中,当判断车辆离最终泊入位置较近时对轮端扭矩进行限制,当车辆持续一段时间保持静止,并且车辆持续保持静止时车辆轮端扭矩大于在平坦路面行驶的最小轮端扭矩,以上条件都满足时判断泊车完成,轮端扭矩降为0。
在上述技术方案中,所述带限位器车位泊入方法的具体步骤如下:S1、车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置较近时,即当|y1-y0| 在上述技术方案中,还包括车位前方带路沿泊入策略,所述车位前方带路沿泊入策略如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当遇到车位前方带路沿场景时,增大车辆驱动扭矩,使车辆可以顺利上路沿,完成车辆泊车。 在上述技术方案中,所述车位前方带路沿泊入策略的方法如下:当车辆开始靠近车位时,因车辆轮端扭矩上限未被限制,轮端扭矩较大,车辆可以爬上带路沿的车位,同时为了防止因车辆上路沿后减速度较大导致车辆静止,通过车辆轮端扭矩作区分,当轮端扭矩小于在平坦路面行驶的最小轮端扭矩时,此时因车辆速度过高而减速,扭矩较小,而车辆后轮碰到限位器时,轮端扭矩小于在平坦路面行驶的最小轮端扭矩,扭矩较大,退出泊车状态。 在上述技术方案中,所述车位前方带路沿泊入方法的具体步骤如下:S1’、车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置有一段距离时,即当|y1-y0| 本发明还提供了一种自动泊车车辆控制装置,包括带限位器车位泊入模块或/和车位前方带路沿泊入模块:所述带限位器车位泊入模块内容如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当车辆车轮碰到限位器后,迅速减小扭矩,避免车轮撞击限位器甚至越过限位器,完成车辆泊车;所述车位前方带路沿泊入模块内容如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当遇到车位前方带路沿场景时,增大车辆驱动扭矩,使车辆可以顺利上路沿,完成车辆泊车。 在上述技术方案中,所述带限位器车位泊入模块的具体内容如下:限位器实时坐标单元:车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置较近时,即当|y1-y0| 在上述技术方案中,所述车位前方带路沿泊入模块的具体内容如下:路沿实时坐标单元:车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置有一段距离时,即当|y1-y0| 本发明又提供了一种计算机系统,包括自动泊车车辆控制装置。 本发明自动泊车车辆控制方法、装置及计算机系统,具有以下有益效果:本发明主要用于自动泊车领域,自动泊车系统由若干超声波雷达和摄像头以及控制器组成。泊车过程中摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,完成车辆泊车功能。同时在自动泊车过程中,摄像头和雷达实时感知车辆周围环境信息,泊车系统根据环境信息,控制车辆转向、加速、减速、刹车。 在车辆自动泊入过程中,本发明针对的场景分别是车位前方带路沿和车位中有限位器的场景。对于这两种场景,综合考虑车辆控制和决策。当遇到车位前方带路沿场景时,增大车辆驱动扭矩,使车辆可以顺利上路沿;当遇到车位中有限位器场景时,当车辆车轮碰到限位器后,迅速减小扭矩,避免车轮撞击限位器甚至越过限位器。 附图说明 图1为本发明自动泊车车辆控制方法中车位框后方带限位器场景下车辆泊车入位的空间示意图; 图2为本发明自动泊车车辆控制方法中车位框后方带限位器场景下车辆泊入车位的流程示意图; 图3为本发明自动泊车车辆控制方法中车位框前方带路沿场景下车辆泊车入位的结构示意图; 图4为本发明本发明自动泊车车辆控制方法中车位框前方带路沿场景下车辆泊车入位的流程示意图; 图5为本发明自动泊车车辆控制装置的结构示意图; 图6为本发明自动泊车车辆控制装置中带限位器车位泊入模块的结构示意图; 图7为本发明自动泊车车辆控制装置中车位前方带路沿泊入模块的结构示意图; 图8为本发明计算机系统的结构示意图。 具体实施方式 下面结合附图及实施例对本发明作进一步的详细描述,但该实施例不应理解为对本发明的限制。 本发明分别针对车位框后方带限位器和车位框前方带路沿两种场景提出不同的泊位策略,下面将分别予以阐述。 1、带限位器车位泊入策略 参见图1,车位框后方带限位器的车位是一种比较常见的车位场景,当后轮碰到限位器,表示车辆已经后退到极限。在自动泊入时,当后轮碰到限位器通常代表泊车完成,可以退出泊车。 这一场景下的自动泊车方法,是以车辆后桥中心作为坐标参考点,坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),若泊入最终位置在限位器后方,车辆后轮会撞击甚至越过限位器,以使车辆后桥坐标点到达(x0,y0),此时用户体验不好,存在安全隐患。 传统方案中,首先通过车辆摄像头识别限位器,当识别到限位器后,泊车系统把车辆泊入最终位置(x0,y0)设置在限位器前方,这样可以避免后轮撞限位器,但是因光照等因素影响,摄像头有一定概率识别不到限位器。 当摄像头识别不到限位器,可通过车辆超声波雷达识别限位器,当超声波雷达识别到限位器后,泊车系统把车辆泊入最终位置(x0,y0)设置在限位器前方,这样可以避免后轮撞限位器。但是因超声波雷达探测距离及探测盲区问题,有一定概率识别不到限位器。 传统方案的缺陷是,摄像头和超声波雷达受限于传感器的探测能力,有一定概率探测不到限位器,导致车辆泊车时撞击甚者越过限位器,用户体验不好,同时也存在安全隐患。 参见图2,本实施例利用了车辆泊入过程中内部参数特征,包括车辆坐标位置、轮端扭矩、车辆静止状态参数,不依赖外部传感器感知的数据,来判断车辆是否撞限位器,并且只在车辆离车位目标位置较近时,才触发撞限位器策略,通过这个策略,车辆后轮碰到限位器后,系统可以立即识别,从而退出泊车,判断泊车完成,详细方案如下: S1、车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置较近时,即当|y1-y0| S2、车辆行驶过程中,轮速脉冲在单位时间内的变化率和车速成正比,车辆低速行驶工况下,车速不太精确且响应不及时,需使用轮速脉冲来计算车辆实时移动情况。自动泊入过程中,车速较低,当车辆后退过程中后轮碰到限位器时,车辆静止,此时轮速脉冲变化率为0。设起始时刻T0,轮速脉冲值为V1,下一周期T1轮速脉冲值为V2,当|V2-V1| S3、当车辆静止时,同时判断车辆轮端扭矩N,若N>N2(通常N2为在平坦路面行驶的最小轮端扭矩,N2 当满足以上条件,即车辆正在后退过程中(N>N2),判断车辆离最终泊入位置较近时(|y1-y0| 2、车位前方带路沿泊入策略 参见图3,车位框前方带路沿的车位是另一种比较常见的车位场景,自动泊车过程中,通常后轮可以越过车位前方的路沿,车辆后退一段距离后,前轮碰到车位前方的路沿时,路沿高度大于一定的值(通常是3-5cm),可能越不过去,导致泊车失败。 传统方案的缺陷是,在自动泊车过程中,考虑到安全因素,比如车位中有限位器场景,通常对车辆后退的扭矩进行限制,当车位前方有较矮的路沿时,因车辆后退扭矩被限制,车辆无法上路沿,泊车失败。 参见图4,本方案利用了车辆泊入过程中内部参数特征,包括车辆坐标位置、轮端扭矩、车辆静止状态参数,重点对车辆行驶位置分区域,当车辆开始靠近车位时,进入“带限位器车位泊入策略”,对车辆轮端扭矩限制上限值。当车辆离车位有一段距离时,车辆轮端扭矩最大值,设置成大于上车位前方路沿所需的扭矩,从而车辆可以顺利上路沿。同时对车辆静止状态做区分,当车辆因后轮碰到限位器导致车辆静止时,此时扭矩较大,当车辆因上路沿后速度过快减速导致车辆静止,此时扭矩较小,通过扭矩来区分处于哪种工况,从而避免上路沿后还未泊入到车位而退出泊车,详细方案如下: S1’、车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置有一段距离时,即当|y1-y0| S2’、车辆后退过程中,为了越过车位前方的路沿,车辆轮端扭矩值会较大,导致车辆越过轮端扭矩后瞬间加速度较大,为了控制泊入时的车速,此时车辆减速,迅速降低车辆轮端扭矩值,当车辆离最终泊入位置较近时,即|y1-y0| 当满足以上条件,即当|y1-y0| 参见图5,本发明自动泊车车辆控制装置,包括带限位器车位泊入模块或/和车位前方带路沿泊入模块: 所述带限位器车位泊入模块内容如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当车辆车轮碰到限位器后,迅速减小扭矩,避免车轮撞击限位器甚至越过限位器,完成车辆泊车; 所述车位前方带路沿泊入模块内容如下:摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,当遇到车位前方带路沿场景时,增大车辆驱动扭矩,使车辆可以顺利上路沿,完成车辆泊车。 参见图6,所述带限位器车位泊入模块的具体内容如下: 限位器实时坐标单元:车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置较近时,即当|y1-y0| 限位器自动泊入单元:自动泊入过程中,使用轮速脉冲来计算车辆实时移动情况,当车辆后退过程中后轮碰到限位器时,车辆静止,此时轮速脉冲变化率为0,设起始时刻T0,轮速脉冲值为V1,下一周期T1轮速脉冲值为V2,当|V2-V1| 限位器扭矩判断单元:当车辆静止时,同时判断车辆轮端扭矩N,若N>N2,其中,N2为在平坦路面行驶的最小轮端扭矩,且N2 参见图7,所述车位前方带路沿泊入模块的具体内容如下: 路沿实时坐标单元:车辆泊车过程中后轮的实时坐标点为(x1,y1),车辆泊入最终位置是(x0,y0),车辆后退过程中离泊入最终位置有一段距离时,即当|y1-y0| 路沿自动泊入单元:车辆越过车位前方的路沿后,车辆减速,迅速降低车辆轮端扭矩值,当车辆离最终泊入位置较近,即|y1-y0| 参见图8,本发明计算机系统,包括自动泊车车辆控制装置。 本发明主要用于自动泊车领域,自动泊车系统由12个超声波雷达、4个摄像头和控制器组成。泊车过程中摄像头和雷达进行车位识别,并生成车位坐标信息,泊车系统根据车位坐标信息,规划出车辆泊入最终位置坐标,泊车系统控制车辆驱动和转向,完成车辆泊车功能。同时在自动泊车过程中,摄像头和雷达实时感知车辆周围环境信息,泊车系统根据环境信息,控制车辆转向、加速、减速、刹车。 在车辆自动泊入过程中,本发明分别针对的是车位前方带路沿和车位中有限位器的场景。对于这两种场景,需要综合考虑车辆控制和决策。当遇到车位前方带路沿场景时,需要增大车辆驱动扭矩,使车辆可以顺利上路沿;当遇到车位中有限位器场景时,当车辆车轮碰到限位器后,需要迅速减小扭矩,避免车轮撞击限位器甚至越过限位器。 显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。 本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。