一种随钻成像地面仿真测试装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及钻井随钻测量技术领域,尤其是涉及一种随钻成像地面仿真测试装置。
背景技术
随钻成像测量传感器在井下测量的时候,受到不同的地质环境、井斜、方位、井眼尺寸、在井眼中的位置、运动轨迹、转速、钻时、泥浆类型等因素的影响,这些因素直接影响了随钻测量的数据输出。目前仪器标定往往使用刻度井或实验井,但是这些往往是静态放置井筒中,无法仿真钻井过程中随钻扫描成像的过程,实验结果缺少各个环境的模拟。同样使用真实井位进行仪器测试代价高昂,数据修正和重复测试也无法进行,优化结论无法进行验证。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种随钻成像地面仿真测试装置,该装置使用简单,可以真实的仿真成像传感器井下运行状态,可以实时导出数据进行分析处理并将实验结果进行验证。
为了达到上述目的,本发明的实施例提出了一种随钻成像地面仿真测试装置,包括:
底座,所述底座连接有液压升降部和旋转电机,所述液压升降部可使所述底座相对地面沿竖直方向倾斜第一角度,所述旋转电机可使所述底座相对所述地面沿水平方向旋转第二角度;
井筒支架,连接于所述底座,形成容纳空间,以及形成容纳空间上的支撑平面;
井筒,所述井筒置于所述容纳空间内,并固定于底座上;
传感器运动控制部,所述传感器运动控制部设于所述支撑平面上;
其中,所述传感器运动控制部包括第一滑动架、第二滑动架、第三滑动架、第四升降架和第五旋转轴,所述第一滑动架、所述第二滑动架、所述第三滑动架、所述第四升降架和所述第五旋转轴分别连接有驱动电机;
所述第一滑动架固定连接于所述支撑平面上,所述第二滑动架滑动连接于所述第一滑动架上并相对于所述第一滑动架沿第一方向滑动;
所述第三滑动架滑动连接于所述第二滑动架上并相对于所述第二滑动架沿第二方向滑动;
所述第四升降架沿垂直方向固定连接于所述第三滑动架上并可相对所述第三滑动架沿第三方向上下升降;
所述第五旋转轴固定连接于所述第四升降架上并可相对于所述第四升降架旋转;
所述第五旋转轴延伸进所述井筒的一端固定连接有传感器容器,所述传感器容器内可容纳测量传感器;
控制器,所述控制器控制连接于所述驱动电机;
上位控制系统,所述上位控制系统连接于所述控制器,用于传输控制信号至所述控制器;所述上位控制系统通信连接于所述传感器容器内的所述测量传感器,用于接收所述测量传感器的采集的数据。
进一步地,所述测量传感器为方位伽马传感器、加速度计传感器、磁通门传感器、光纤陀螺传感器、超声井径传感器中的至少一种。
进一步地,所述第一角度的范围为0°-90°。
进一步地,所述第二角度的范围为0°-360°。
进一步地,所述液压升降部使所述底座相对于地面沿竖直方向倾斜第一角度,用于仿真测量过程的井斜姿态;所述旋转电机使所述底座相对于地面沿水平方向旋转第二角度,用于仿真测量过程中井筒的方位姿态;所述第一滑动架固定连接于所述支撑平面上,所述第二滑动架滑动连接于所述第一滑动架上并可相对于所述第一滑动架滑动,以及所述第三滑动架滑动连接于所述第二滑动架上并可相对于所述第二滑动架滑动,用于仿真测量过程中传感器的方位姿态;所述第四升降架沿垂直方向固定连接于所述第三滑动架上并可相对所述第三滑动架上下升降,用于仿真测量过程中传感器的运动姿态;所述第五旋转轴固定连接于所述第四升降架上并可相对于所述第四升降架旋转,用于仿真测量过程中传感器的转速姿态。
进一步地,第一滑动架、第二滑动架、第三滑动架、第四升降架、第五旋转轴进行复合运动,可以带动传感器绕井筒内一个固定的圆心做传感器始终面对井筒壁的环形旋转扫描,仿真不同钻铤直径的仪器对井筒的扫描测量实验。
进一步地,所述底座升降倾斜的一端设有配重块,用于平衡底座倾斜后的重心。
进一步地,所述传感器容器为抗压管,可隔离外部泥浆或高压水流。
进一步地,所述第五旋转轴的中部贯穿连接有滑环,用于传感器旋转的时候传递信号和电源能量。
进一步地,所述传感器容器内还设有电源和数据存储器,所述电源与所述测量传感器电连接,所述数据存储器与所述测量传感器数据连接。
进一步地,所述上位控制系统内置控制软件,所述控制软件可以输入转速、钻进时间、偏心旋转参数、所述第一角度、所述第二角度对传感器面进行井壁扫描仿真运动测试。
本发明使用可旋转倾斜底座、传感器运动控制部来进行随钻成像仪器扫描实验。
其中,具体包括可以360度旋转、倾斜调整带有配重块的底座、一个仿真井筒放置井筒支架、传感器运动控制部、控制器、上位控制系统、仿真井筒和测量传感器组成。
其中:可以360度旋转、倾斜调整带有配重块的底座可以仿真传感器在不同的方位,不同的井斜情况下的姿态,并使用一个配重块,防止装置在测试较重传感器倾斜状态下失去平衡。装置使用电机和液压撑杆计算机电动调整旋转方位和倾斜角。仿真井筒放置井筒支架上部安装传感器运动控制部,下部连接在底座上,中间部位放置仿真井筒。
传感器运动控制部由第一滑动架、第二滑动架、第三滑动架、第四升降架和第五旋转轴组成,仿真传感器在井筒中的位移运动;可以仿真钻进过程中的机械钻时;一个可以旋转的轴,仿真传感器在井下的转动和传感器方位敏感面的指向。一个带有滑环和传感器抗压管的容器,用于容纳传感器,并在旋转的情况下传递数据和电源。用于仿真传感器在井下不同井斜、方位、工具面、钻时、转速、井筒中的运动位移等姿态。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
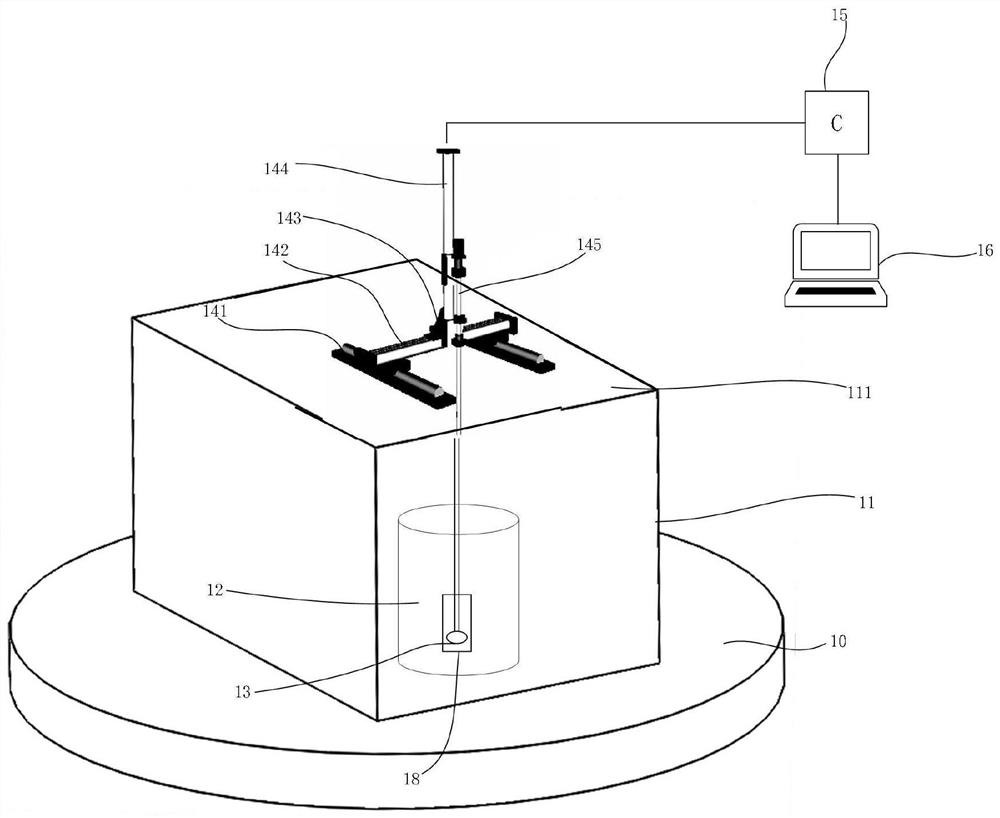
图1是根据本发明一个实施例的随钻成像地面仿真测试装置的结构示意图;
图2是根据本发明一个实施例的随钻成像地面仿真测试装置中的底座的结构示意图。
图中:
底座10;
井筒支架11;
支撑平面111;
井筒12;
测量传感器13;
第一滑动架141;
第二滑动架142;
第三滑动架143;
第四升降架144;
第五旋转轴145;
控制器15;
上位控制系统16;
配重块17;
抗压管18。
具体实施方式
下面详细描述本发明的实施例,参考附图描述的实施例是示例性的,下面详细描述本发明的实施例。
下面参考图1和图2描述根据本发明实施例的一种随钻成像地面仿真测试装置。
该随钻成像地面仿真测试装置,包括:底座10、连接于底座10上的并内部形成容纳空间的井筒支架11、置于上述容纳空间内的井筒和传感器运动控制部。
具体而言,底座10支撑于地面,或支撑于试验台,其中,所述底座10连接有液压升降部和旋转电机,所述液压升降部可使所述底座10相对地面沿竖直方向倾斜第一角度,以使底座10可升降倾斜一定角度,以仿真模拟倾斜的状态;所述旋转电机可使所述底座10相对所述地面沿水平方向旋转第二角度,使得底座10可沿水平面旋转,以仿真模拟水平旋转的状态。
具体工作时,其中的液压升降部可使一端支撑于地面,另一端支撑于底座10,从而在液压升降部工作时,实现对底座10相对地面沿竖直方向倾斜第一角度,对于液压升降部的结构对于本领域技术人员来说,有很多常规结构选择,在此不予限定。
具体工作时,其中的旋转电机可固定于固定支架上,旋转轴旋转连连接于底座10,从而实现对底座10沿水平方向的旋转第二角度,对于旋转电机的其他常规连接方式,对于本领域技术人员来说,也有常规结构选择,在此不予限定。
井筒支架11,连接于所述底座10,形成容纳空间,以及形成容纳空间上的支撑平面111;具体地,井筒支架11连接于底座10的边缘,沿竖直方向固定连接于底座10上,从而内部形成有容纳空间,且井筒支架11远离底座10的一端水平固定有支撑平面111。
井筒12,所述井筒置于所述容纳空间内,并固定于底座10上,该井筒12为仿真井筒,可模拟井筒实际工作时的工作环境,其中,井筒模型内可加入泥浆、水流等真实工作工况。
传感器运动控制部,所述传感器运动控制部设于所述支撑平面111上,该传感器运动控制部用于模拟传感器工作时的各种状态,用于仿真传感器在井下不同井斜、方位、工具面、钻时、转速、井筒中偏心旋转、井筒中的运动位移时的姿态,为地面放置测试装置提供全面的传感器姿态测试及仿真。
其中,所述传感器运动控制部包括第一滑动架141、第二滑动架142、第三滑动架143、第四升降架144和第五旋转轴145,所述第一滑动架141、所述第二滑动架142、所述第三滑动架143、所述第四升降架144和所述第五旋转轴145分别连接有驱动电机;
所述第一滑动架141固定连接于所述支撑平面111上,所述第二滑动架142滑动连接于所述第一滑动架141上并相对于所述第一滑动架141沿第一方向滑动,该第一方向可为左右方向,即第二滑动架142可相对于第一滑动架141左右方向滑动。
所述第三滑动架143滑动连接于所述第二滑动架142上并相对于所述第二滑动架142沿第二方向滑动,该第二方向可为前后方向,即第三滑动架143可相对第二滑动架142前后方向滑动。
所述第四升降架144沿垂直方向固定连接于所述第三滑动架143上并可相对所述第三滑动架143沿第三方向上下升降。
所述第五旋转轴145固定连接于所述第四升降架144上并可相对于所述第四升降架144旋转,具体地,第五旋转轴145通过转接架连接于第四升降架144,转接架内设有旋转轴承,第五旋转轴145穿设与旋转轴承内,实现自身在稳定的旋转。
所述第五旋转轴145延伸进所述井筒的一端固定连接有传感器容器,所述传感器容器内可容纳测量传感器13。
控制器15,所述控制器15控制连接于所述驱动电机,其中驱动电机为多个,每个驱动电机为分别驱动连接于第一滑动架141、第二滑动架142、第三滑动架143、第四升降架144和第五旋转轴145,每个驱动电机可独立接受控制器15的控制信号,因此,控制器15可根据需要控制需要控制的驱动电机工作或停止。
上位控制系统16,该上位机控制系统可以为PC电脑、手机等移动终端,其内置于控制软件,该控制软件可修改控制参数并实现控制,并实时接收采集到的测量传感器13数据。所述上位控制系统16连接于所述控制器15,用于传输控制信号至所述控制器15;所述上位控制系统16通信连接于所述传感器容器内的所述测量传感器13,用于接收所述测量传感器13的采集的数据。
上位控制系统内置控制软件,控制软件可以输入转速、钻进时间、偏心参数、第一角度、第二角度对传感器井壁扫描进行仿真运动测试。
具体而言,所述测量传感器13为方位伽马传感器、加速度计传感器、磁通门传感器、光纤陀螺传感器、超声井径传感器中的至少一种。其中,方位伽马传感器可测量不同运动姿态时仿真井筒的自然伽马信息,加速度计传感器和磁通门可测量仪器在扫描时的姿态和测量工具面,光纤陀螺传感器可测量工作时的井斜、方位信息,超声井径传感器可测量装置工作时仿真井筒尺寸信息。
具体而言,所述第一角度的范围为0°-90°,从而该地面仿真测试装置可模拟仿真井筒工作时的井斜工况。
具体而言,所述第二角度的范围为0°-360°,从而模拟井筒旋转钻进时的工作状态。
在对上述第一方向、第二方向和第三方向具体描述时,采用笛卡尔坐标系对其具体限定,具体为:所述第一方向为笛卡尔直角坐标系中的X方向,所述第二方向为笛卡尔直接坐标系中的Y方向,所述第三方向为笛卡尔坐标系中的Z方向。
液压升降部使底座10相对于地面沿竖直方向倾斜第一角度,用于仿真测量过程的井斜姿态;旋转电机使底座10相对于地面沿水平方向旋转第二角度,用于仿真测量过程中井筒的方位姿态;第一滑动架141固定连接于支撑平面上,第二滑动架142滑动连接于第一滑动架上并可相对于第一滑动架141滑动,以及第三滑动架143滑动连接于第二滑动架上并可相对于第二滑动架142滑动,用于仿真测量过程中传感器的方位姿态;第四升降架144沿垂直方向固定连接于第三滑动架143上并可相对第三滑动架143上下升降,用于仿真测量过程中传感器的运动姿态;第五旋转轴145固定连接于第四升降架144上并可相对于第四升降架144旋转,用于仿真测量过程中传感器的转速姿态。第一滑动架、第二滑动架、第三滑动架复合运动可以带动传感器绕井筒内一个固定的圆心做环形行星旋转,第四升降架、第五旋转轴可以使得传感器在环形行星旋转的时候测量敏感面始终面对仿真井壁,可以仿真不同钻铤直径的仪器对井筒的扫描测量实验。
由于具体工作时,可以360度旋转、倾斜90度的底座10可以仿真传感器在不同的方位,不同的井斜情况下的姿态,并使用一个配重块17,防止装置在测试较重传感器倾斜状态下失去平衡。因此,底座10升降倾斜的一端设有配重块17。
为模拟仿真真实的工作环境,传感器容器为抗压管18,可隔离外部泥浆或高压水流。
具体地,第五旋转轴145的中部贯穿连接有滑环,用于传感器旋转的时候传递信号和电源能量。
在一些实施例中,传感器容器内还设有电源和数据存储器,电源与测量传感器电连接,数据存储器与测量传感器数据连接,可实现对传感器电源需求的实时供给,以及传感器数据的实时传输和保存。
本发明实施例提供的随钻成像地面仿真测试装置可以在地面上按照随钻仪器在井下的运行姿态、井眼尺寸、运动特征对仿真井筒进行扫描实验。井斜、方位、钻时、转速等可以实时的修改和快速执行,传感器数据可以实时的导入处理软件分析优化。本发明可以携带安装测量传感器13组件精确仿真安装在钻铤上的一体化仪器在井筒中的运动特征,测量敏感面按照真实仪器的运动特征在仿真井筒中旋转、滑动、摆动以及组合运动。该仿真测试装置在井眼中滑动钻进、复合钻进等真实测量特征。相比单向特征设备或利用真实钻井工程测试,系统简单可靠,效果可观可控,可以加快随钻仪器测量参数的优化、快速验证测量流程与参数优化后的效果。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。