一种注塑产品Bobbin的夹取移载机
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及手机零部件的上下料装置,特别涉及一种注塑产品Bobbin的夹取移载机。
背景技术
手机零部件中,Bobbin产品为批量化浇模注塑生产,需要进行Bobbin产品切除PIN脚工序中,需要多个零件上料、下料以及摆位,现有采用人工上料、下料以及摆放产品到加工位置,存在速度慢,效率差,而且位置放置精度低,切PIN容易产生不良,而且存在人为因素误差,容易损伤人手以及产品表面的现象。
发明内容
为了解决上述问题的一个或多个,本发明提供了一种注塑产品Bobbin的夹取移载机。
根据本发明的一个方面,该一种注塑产品Bobbin的夹取移载机包括若干组夹具、两个拉动组件、两个夹座以及XYZ移动模组;
每组夹具包括左夹臂、右夹臂,左夹臂的右侧面设有左圆弧槽,右夹臂的左侧面设有右圆弧槽,左圆弧槽和右圆弧槽水平对称设置且分别和Bobbin的空心管体的外轮廓相配合,若干个左夹臂等间距连接在下方水平摆布的移动板下表面,若干个右夹臂同等间距连接在上方垂直摆布的移动板侧表面,两个移动板相向运动或相离运动,每组左夹臂和右夹臂同时相向运动夹持空心管体或同时相离运动释放空心管体,
拉动组件包括伸缩端横向相对设置的两个拉动气缸以及两个移动板;一个拉动气缸固定在下平板上,拉动气缸的伸缩端连接下方的移动板;另一个拉动气缸固定在垂基板上,拉动气缸的伸缩端连接上方的移动板;下方的移动板的上表面以及上方的移动板的后侧面均安装若干个第一滑块;
每个夹座包括下平板以及垂基板,垂基板垂直固定在下平板上,下平板下表面以及垂基板的前侧面连接一个横向的第一导轨,第一导轨上滑动连接若干个第一滑块,下平板后端垂直连接后联板;
XYZ移动模组包括X轴组件、Y轴组件以及两个Z轴组件,X轴组件横向设置在上料工位、切PIN台以及下料治具的前端;X轴组件的横向移动端连接Y轴组件,Y轴组件的纵向移动端连接两个Z轴组件,每个Z轴组件的垂向移动端连接一个后联板,XYZ移动模组带动夹座以及夹座上的夹具进行X向、Y向以及Z向直线运动。
该装置实现了采用XYZ移动部结合特征设置的夹具的左夹臂以及右夹臂,并采用直线导轨滑块、气缸输出直线运动的拉动组件,实现了在上料工位、切PIN台以及下料治具三者之间同时从上料工位、切PIN台上取料或同时在切PIN台以及下料治具上摆放产品;其有益效果是:其一,自动化上料、下料以及摆料,速度快,效率高,适用大规模连续化生产,同时避免了人为因素误差,保护作业人员和产品;其二,将原先的三个工序转化为两个工序,将逐个上下料变化为同时上下料,速度大大提高,大大节约人力以及设备占用面积;其三,采用特征设置的夹具,左夹臂和右夹臂和产品相配合,实现了产品的高精度取料;其四,特别设计的拉动组件,滑轨滑块导向,直线输出精度高,能够同时完成多个产品的高精度拉动;其五,采用特制的夹座,稳定性能高,而且两个移动板设置在夹座的上表面以及前侧面,结构紧凑,而且能够实现较高的平行度,能够实现多个产品的高精度稳定抓取下料。
在一些实施方式中,左夹臂包括水平纵向摆布的左夹头,左夹头的右侧面设有左圆弧槽,左夹头后端垂直向上延伸形成左立段,左立段上端向后垂直延伸形成后联段;
右夹臂包括水平纵向摆布的右夹头,右夹头的左侧面设有右圆弧槽后端垂直向上延伸形成右立段,右立段上端向后垂直延伸形成中平段,中平段后端向上垂直延伸形成上联段。
在一些实施方式中,空心管体上端形成上挡环体且下端形成下挡环体,上挡环体和下挡环体的间距大于左夹头、右夹头的高度。
在一些实施方式中,左夹臂和右夹臂为一定弹性且微变形的聚氨酯材质或亚克力材质制作;或左圆弧槽和右圆弧槽贴覆聚氨酯材质或亚克力材质的圆弧片。
在一些实施方式中,移动板的一个表面等间距设有若干个第一定位槽且相对表面设有第二定位槽,第一定位槽和左夹臂的上联段和右夹臂的后联段的宽度相同;第二定位槽和第一滑块的宽度相同。
在一些实施方式中,两个拉动气缸的缸筒分别通过第一气缸板连接下平板或垂基板上,两个拉动气缸的伸缩端分别通过第二气缸板连接移动板;下平板或垂基板上分别设有一个和第二气缸板相对的限位座;
拉动气缸的伸缩端和第二气缸板之间设有浮动接头。
在一些实施方式中,两个第一气缸板分别设有和下平板或垂基板宽度相同的第三定位槽,第二气缸板设有和移动板宽度相同的第四定位槽。
在一些实施方式中,夹座包括上保持板,上保持板前侧面螺纹连接垂基板,上保持板后侧面螺纹连接后联板,上保持板下表面螺纹连接下平板。
在一些实施方式中,X轴组件包括横向设置的第一伺服直线模组;
Y轴组件包括纵向设置的第二伺服直线模组;
Z轴组件包括垂向设置的第三伺服直线模组。
在一些实施方式中,X轴组件包括横向设置的第一滑轨滑块组件,第一动板下分别横向连接第一伺服直线模组以及第一滑轨滑块组件的移动端;
Y轴组件包括纵向设置的第二滑轨滑块组件,第二伺服直线模组以及第二滑轨滑块组件的固定端分别连接在第一动板上,第二动板下分别纵向连接第二伺服直线模组以及第二滑轨滑块组件的移动端;
Z轴组件包括垂立座,两个垂立座分别垂直连接在第二动板上,垂立座前侧面垂直连接第三伺服直线模组,第三伺服直线模组的移动端连接后联板。
附图说明
图1为本发明一实施方式的一种注塑产品Bobbin的夹取移载机的三维示意图;
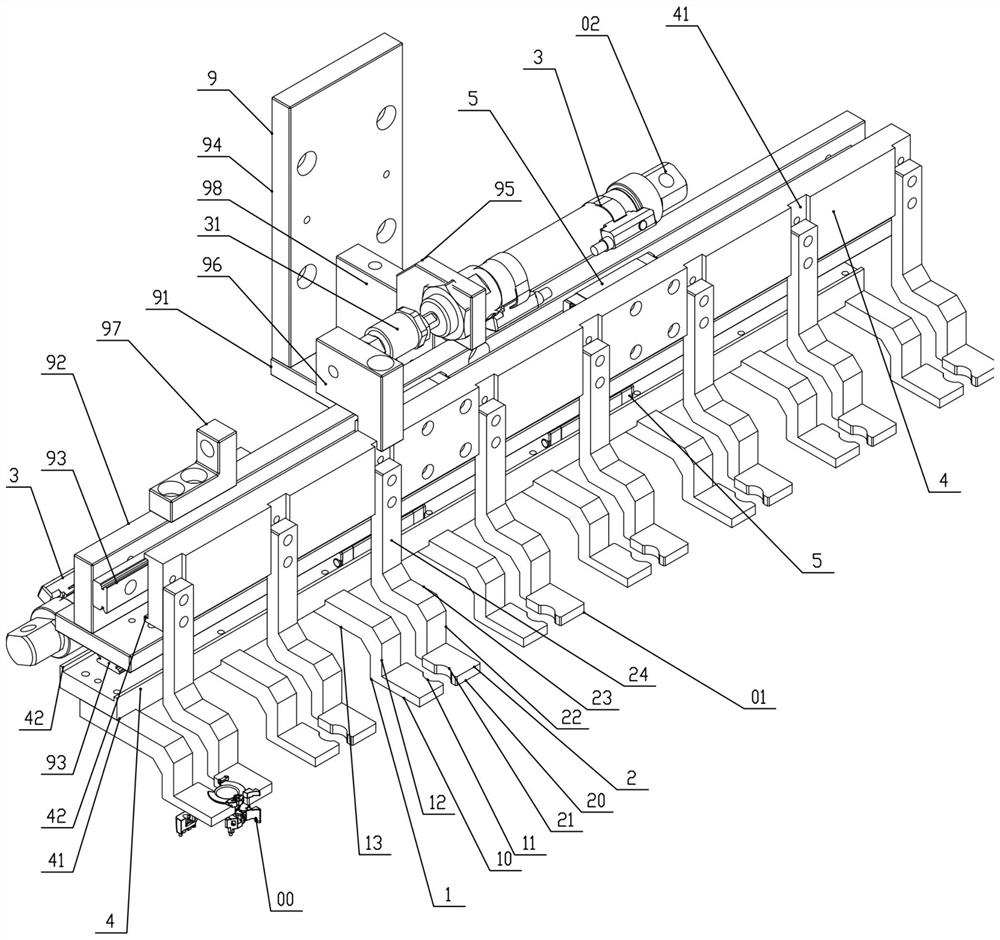
图2为图1所示夹具以及拉动组件的三维示意图;
图3为图2所示Bobbin的三维示意图;
图4为图2所示左夹臂以及拉动组件的三维示意图;
图5为图2所示右夹臂以及拉动组件的三维示意图;
图6为图2所示夹座的三维示意图;
图7为图1所示XYZ移动组件的三维示意图;
Bobbin00,空心管体001,上挡环体002,下挡环体003;
夹具01,左夹臂1,左夹头10,左圆弧槽11,左立段12,后联段13;右夹臂2,右夹头20,右圆弧槽21,右立段22,中平段23,上联段24;
拉动组件02,拉动气缸3,浮动接头31,移动板4,第一定位槽41,第二定位槽42,第一滑块5;
XYZ移动模组03,X轴组件6,第一伺服直线模组61,第一滑轨滑块组件62,第一动板63,Y轴组件7,第二伺服直线模组71,第二滑轨滑块组件72,第二动板73,Z轴组件8,第三伺服直线模组81,垂立座82;
夹座9,下平板91,垂基板92,第一导轨93,后联板94,第一气缸板95,第二气缸板96,限位座97,上保持板98。
具体实施方式
下面结合附图对本发明作进一步详细的说明。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
图1至图7示意性地显示了根据本发明的一种实施方式的一种注塑产品Bobbin的夹取移载机。如图所示,该装置包括若干组夹具01、两个拉动组件02、两个夹座9以及XYZ移动模组03;
每组夹具01包括左夹臂1、右夹臂2,左夹臂1的右侧面设有左圆弧槽11,右夹臂2的左侧面设有右圆弧槽21,左圆弧槽11和右圆弧槽21水平对称设置且分别和Bobbin00的空心管体001的外轮廓相配合,若干个左夹臂1等间距连接在下方水平摆布的移动板4下表面,若干个右夹臂2同等间距连接在上方垂直摆布的移动板4侧表面,两个移动板4相向运动或相离运动,每组左夹臂1和右夹臂2同时相向运动夹持空心管体001或同时相离运动释放空心管体001,
拉动组件02包括伸缩端横向相对设置的两个拉动气缸3以及两个移动板4;一个拉动气缸3固定在下平板91上,拉动气缸3的伸缩端连接下方的移动板4;另一个拉动气缸3固定在垂基板92上,拉动气缸3的伸缩端连接上方的移动板4;下方的移动板4的上表面以及上方的移动板4的后侧面均安装若干个第一滑块5;
每个夹座9包括下平板91以及垂基板92,垂基板92垂直固定在下平板91上,下平板91下表面以及垂基板92的前侧面连接一个横向的第一导轨93,第一导轨93上滑动连接若干个第一滑块5,下平板91后端垂直连接后联板94;
XYZ移动模组03包括X轴组件6、Y轴组件7以及两个Z轴组件8,X轴组件6横向设置在上料工位、切PIN台以及下料治具的前端;X轴组件6的横向移动端连接Y轴组件7,Y轴组件7的纵向移动端连接两个Z轴组件8,每个Z轴组件8的垂向移动端连接一个后联板94,XYZ移动模组03带动夹座9以及夹座9上的夹具01进行X向、Y向以及Z向直线运动。
该装置实现了采用XYZ移动部03结合特征设置的夹具01的左夹臂1以及右夹臂2,并采用直线导轨滑块、气缸输出直线运动的拉动组件02,实现了在上料工位、切PIN台以及下料治具三者之间同时从上料工位、切PIN台上取料或同时在切PIN台以及下料治具上摆放产品;其有益效果是:其一,自动化上料、下料以及摆料,速度快,效率高,适用大规模连续化生产,同时避免了人为因素误差,保护作业人员和产品;其二,将原先的三个工序转化为两个工序,将逐个上下料变化为同时上下料,速度大大提高,大大节约人力以及设备占用面积;其三,采用特征设置的夹具01,左夹臂1和右夹臂2和产品相配合,实现了产品的高精度取料;其四,特别设计的拉动组件02,滑轨滑块导向,直线输出精度高,能够同时完成多个产品的高精度拉动;其五,采用特制的夹座9,稳定性能高,而且两个移动板4设置在夹座9的上表面以及前侧面,结构紧凑,而且能够实现较高的平行度,能够实现多个产品的高精度稳定抓取下料。
优选的,左夹臂1包括水平纵向摆布的左夹头10,左夹头10的右侧面设有左圆弧槽11,左夹头10后端垂直向上延伸形成左立段12,左立段12上端向后垂直延伸形成后联段13;
右夹臂2包括水平纵向摆布的右夹头20,右夹头20的左侧面设有右圆弧槽21后端垂直向上延伸形成右立段22,右立段22上端向后垂直延伸形成中平段23,中平段23后端向上垂直延伸形成上联段24。
优选的,空心管体001上端形成上挡环体002且下端形成下挡环体003,上挡环体002和下挡环体003的间距大于左夹头10、右夹头20的高度。其有益结果是:该结构能够防止在移动中上下跳动或者脱料现象。
优选的,左夹臂1和右夹臂2为一定弹性且微变形的聚氨酯材质或亚克力材质制作;或左圆弧槽11和右圆弧槽21贴覆聚氨酯材质或亚克力材质的圆弧片。其有益效果是:保护产品表面,无压损等不良特征。
优选的,移动板4的一个表面等间距设有若干个第一定位槽41且相对表面设有第二定位槽42,第一定位槽41和左夹臂1的上联段24和右夹臂2的后联段13的宽度相同;第二定位槽42和第一滑块5的宽度相同。其有益效果是:该设置能够进一步提高左夹臂1以及右夹臂2的安装精度,提高夹取的一致性以及高位置度,第二定位槽42能够提高滑块的安装精度,使得直线精度更加高。
优选的,两个拉动气缸3的缸筒分别通过第一气缸板95连接下平板91或垂基板92上,两个拉动气缸3的伸缩端分别通过第二气缸板96连接移动板4;下平板91或垂基板92上分别设有一个和第二气缸板96相对的限位座97。其有益效果是:限位座97能够保证直线移动的极限位置,防止过度移动损伤产品。
优选的,拉动气缸3的伸缩端和第二气缸板96之间设有浮动接头31。其有益效果是:浮动接头31能够调整拉动距离,保证夹取力度以及贴合精度。
优选的,两个第一气缸板95分别设有和下平板91或垂基板92宽度相同的第三定位槽,第二气缸板96设有和移动板4宽度相同的第四定位槽。
优选的,夹座9还包括上保持板98,上保持板98前侧面螺纹连接垂基板91,上保持板98后侧面螺纹连接后联板94,上保持板98下表面螺纹连接下平板91。其有益效果是:上保持板98提高夹座9的刚度,移动中无晃动现象。
优选的,X轴组件6包括横向设置的第一伺服直线模组61;
Y轴组件7包括纵向设置的第二伺服直线模组71;
Z轴组件8包括垂向设置的第三伺服直线模组81。其有益效果是:伺服直线模组移动精度高,产品放料位置高,而且动作柔和,无晃动现象。
优选的,X轴组件6还包括横向设置的第一滑轨滑块组件62,第一动板63下分别横向连接第一伺服直线模组61以及第一滑轨滑块组件62的移动端;
Y轴组件7包括纵向设置的第二滑轨滑块组件72,第二伺服直线模组71以及第二滑轨滑块组件72的固定端分别连接在第一动板63上,第二动板73下分别纵向连接第二伺服直线模组71以及第二滑轨滑块组件72的移动端;
Z轴组件8还包括垂立座82,两个垂立座82分别垂直连接在第二动板73上,垂立座82前侧面垂直连接第三伺服直线模组81,第三伺服直线模组81的移动端连接后联板94。
以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种注塑产品Bobbin的夹取移载机
- 一种注塑产品Bobbin的夹取移载机