一种切削几何体的图像表达方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明属于数控加工领域,更具体地,涉及一种切削几何体的图像表达方法。
背景技术
在五轴数控加工过程中,刀具进行复杂的空间运动,切削工件,去除多余的材料。一般地,用切削仿真模拟实际加工过程。刀具与工件做相对运动,刀具切除工件,被去除的工件材料,即刀具与工件交集称为切削几何体。研究切削几何体,对于研究实时切削力、切削热十分关键,对于优化加工参数、提高工件表面质量、提升加工效率等有非常重要的意义。实际加工过程中,刀轴方向、刀具加工路径、待加工工件表面不断变化,导致切削几何体不断变化,其几何形状由工件已加工表面、待加工表面、刀具几何参数、切削参数、加工路径等因素决定。由于工件几何形状和加工路径的复杂性,切削几何体是一种三维的复杂多面体,不易存储,不易应用,而常用的几何参数无法描述其几何形状、存储其几何信息。
常见的描述切削几何体的工艺参数主要包括CWE(Cutter-workpieceEngagement)、切削深度、切削宽度、材料去除量等。CWE指刀具与工件接触区域,即加工过程中,刀具表面与工件表面接触的区域。切削几何体指加工过程中,刀具切削工件,工件材料不断减少,工件被刀具去除掉的几何体。切削深度是指垂直于进给速度方向的切削层的最大尺寸,即沿垂直于刀具进给方向,工件已加工表面与待加工表面的距离。切削宽度是指在加工过程中,刀具沿其半径方向,实际参与切削的宽度。材料去除量是指加工过程中,刀具切削工件,工件被去除的部分的体积。由于工件几何形状和多轴加工的复杂性,切削几何体的几何形状十分复杂且不规则,这些现有的几何参数都有各自的使用场景,但是都不能具体、准确、定量地描述切削几何体的几何形状。
综上所述,当前存在的主要问题是,常见的切削工艺参数,无法准确、定量的描述切削过程中切削几何体的几何形状,不易应用于对切削几何体、实时切削力、切削热等方面的研究。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种切削几何体的图像表达方法,由此解决现有技术存在无法准确、定量的描述切削过程中切削几何体几何形状的技术问题。
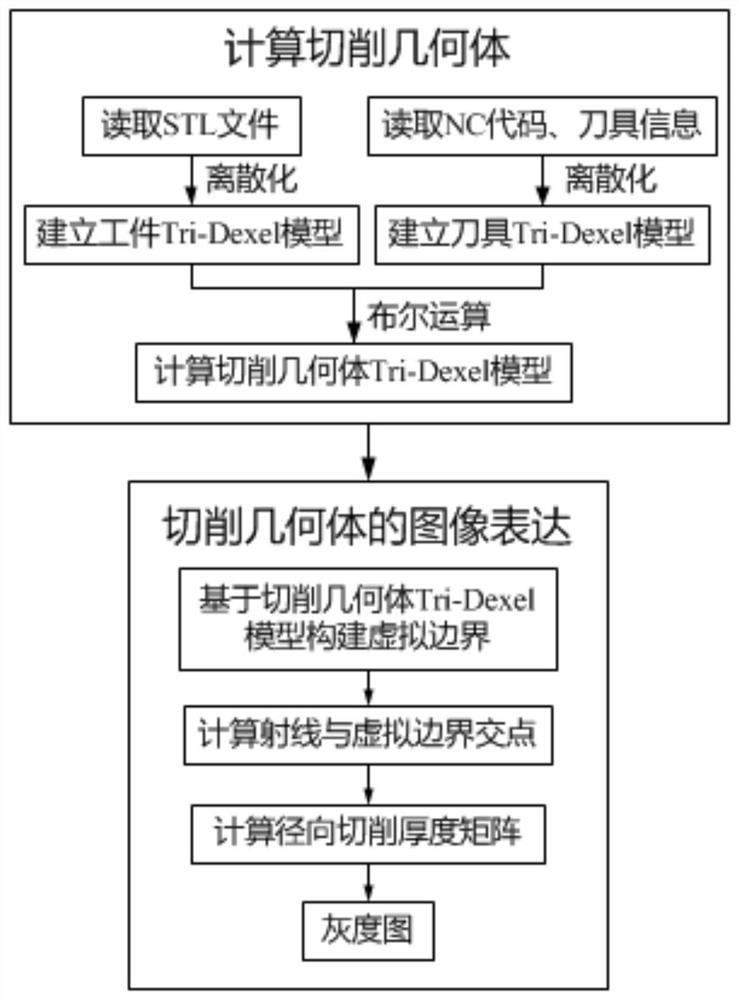
为实现上述目的,本发明提供了一种切削几何体的图像表达方法,包括如下步骤:
(1)将工件的三角面片组成的三维模型离散,得到工件的Tri-Dexel模型,将刀具的运动轨迹离散,得到刀具的Tri-Dexel模型;
(2)将工件的Tri-Dexel模型和刀具的Tri-Dexel模型的交集作为切削几何体的Tri-Dexel模型;
(3)对切削几何体的Tri-Dexel模型的包围盒进行网格划分,得到多个网格单元,从切削几何体对应的刀具球心处引出射线,与包围盒相交,从交点所在的网格单元开始,沿着射线方向搜索位于切削几何体边界的网格单元,将搜索到的网格单元中的Dexel线段的端点相连接,形成切削几何体的虚拟边界;
(4)从切削几何体对应的刀具球心处引出射线与切削几何体的虚拟边界相交,两个交点之间的距离即为径向切削厚度,用矩阵存储不同角度的射线得到的径向切削厚度,将矩阵转化为灰度图。
进一步地,所述步骤(4)中矩阵的行数表示刀具坐标系对应的球坐标系的天顶角,矩阵的列数表示刀具坐标系对应的球坐标系的方位角,矩阵的元素为不同天顶角和方位角组合下的射线得到的径向切削厚度。
进一步地,所述天顶角的范围是91°-180°。
进一步地,所述方位角的范围是1°-360°。
进一步地,所述刀具的Tri-Dexel模型的具体构建方式为:
在刀具的运动轨迹中的相邻刀位点之间进行插补,得到子刀位点,在子刀位点处,将刀具表面分为底部半球面、球身圆柱面和底部圆面,分别将底部半球面、球身圆柱面和底部圆面分解成三角面片组成的三维模型,将三维模型离散化,构建刀具的Tri-Dexel模型。
进一步地,所述工件的Tri-Dexel模型的具体构建方式为:
将工件的三角面片组成的三维模型在XY轴平面划分网格,在每个网格中从Z轴方向做射线,该射线与三维模型中三角面片的交点形成Z轴方向的Dexel模型;
将工件的三角面片组成的三维模型在XZ轴平面划分网格,在每个网格中从Y轴方向做射线,该射线与三维模型中三角面片的交点形成Y轴方向的Dexel模型;
将工件的三角面片组成的三维模型在YZ轴平面划分网格,在每个网格中从X轴方向做射线,该射线与三维模型中三角面片的交点形成X轴方向的Dexel模型;
XYZ轴方向的Dexel模型组成工件的Tri-Dexel模型。
进一步地,所述步骤(3)中的射线为刀具坐标系对应的球坐标系中天顶角91°-180°,方位角1°-360°范围内的所有射线。
进一步地,所述矩阵转化为灰度图的具体实现方式为:
将矩阵中的径向切削厚度归一化至0-65535,得到灰度图的像素值。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
(1)本发明提出用径向切削厚度来描述切削几何体的几何形状,将切削几何体三维Tri-Dexel模型数据转化为二维径向切削厚度矩阵数据,最后,转化为格式与存储空间占用量固定的灰度图。灰度图的像素存储的为径向切削厚度,可以根据像素点的深浅,直观的看出切削几何体各个部位的切厚,而定量指的是将切削几何体这个三维形体表达转化为具体的数字(像素值)表达。以上充分说明本发明的图像表达方法,便于储存,便于应用,能够准确、定量、直观地描述切削几何体的几何形状。
(2)本发明构建虚拟边界的方式不需要整体的重建边界(marching cubes算法是整体重建而且必须整体重建),是一种局部的边界重建方法,可以简化求解过程。
(3)本发明矩阵的元素为不同天顶角和方位角组合下的射线得到的径向切削厚度,便于通过灰度图中像素点的深浅,直观的看出切削几何体在球坐标系中具体位置的切厚。
(4)切削几何体存储了诸多的信息,但其格式不固定,难以处理,难以应用于对切削几何体、实时切削力、切削热等方面的研究,但是其转换为图像表达后,大小和格式固定,就可以方便处理,方便应用于对切削几何体、实时切削力、切削热等方面的研究。
(5)本发明对刀位点进行插补,可以提高加工的精度,通过离散的方式建立工件的Tri-Dexel模型和刀具的Tri-Dexel模型,由此将刀具与工件的复杂的切削运动转化为模型表达。0-255的图像(8位)表示精度太低了,本发明采用的是16位的图像,表达范围就拓展到了0-65535。
附图说明
图1为本发明的整体流程图;
图2为本发明实施例提供的Dexel射线与三角面片模型求交示意图;
图3为本发明实施例提供的离散化的毛坯Tri-Dexel模型;
图4为本发明实施例提供的离散化的刀具Tri-Dexel模型;
图5中(1)为本发明实施例提供的刀具模型与工件模型的第一种求交示意图,图5中(2)为本发明实施例提供的刀具模型与工件模型的第二种求交示意图,图5中(3)为本发明实施例提供的刀具模型与工件模型的第三种求交示意图,图5中(4)为本发明实施例提供的刀具模型与工件模型的第四种求交示意图,图5中(5)为本发明实施例提供的刀具模型与工件模型的第五种求交示意图,图5中(6)为本发明实施例提供的刀具模型与工件模型的第六种求交示意图;
图6为本发明实施例提供的加工后的工件Tri-Dexel模型;
图7中(a)为本发明实施例提供的刀具加工工件的示意图,图7中(b)为本发明实施例提供的加工中工件的示意图,图7中(c)为本发明实施例提供的切削几何体的示意图;
图8为本发明实施例提供的切削几何体的Tri-Dexel模型;
图9为本发明实施例提供的球头刀网格化示意图;
图10为本发明实施例提供的切削几何体包围盒及其网格化示意图;
图11为本发明实施例提供的虚拟边界构造示意图;
图12为本发明实施例提供的射线与切削几何体虚拟边界相交,计算径向切削厚度的示意图;
图13为本发明实施例提供的切削几何体对应的灰度图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
如图1所示,一种切削几何体的图像表达方法,包括如下步骤:
(1)将工件的三角面片组成的三维模型离散,得到工件的Tri-Dexel模型,将刀具的运动轨迹离散,得到刀具的Tri-Dexel模型;
(2)将工件的Tri-Dexel模型和刀具的Tri-Dexel模型的交集作为切削几何体的Tri-Dexel模型;
(3)对切削几何体的Tri-Dexel模型的包围盒进行网格划分,得到多个网格单元,从切削几何体对应的刀具球心处引出射线,与包围盒相交,从交点所在的网格单元开始,沿着射线方向搜索位于切削几何体边界的网格单元,将搜索到的网格单元中的Dexel线段的端点相连接,形成切削几何体的虚拟边界;
(4)从切削几何体对应的刀具球心处引出射线与切削几何体的虚拟边界相交,两个交点之间的距离即为径向切削厚度,用矩阵存储不同角度的射线得到的径向切削厚度,将矩阵归一化至0-65535,并转化为灰度图。
本发明实施例使用两个Tri-Dexel模型,一个表示刀具,一个表示工件,作为例子来说明本发明的具体实时过程。Tri-Dexel模型由XYZ三个方向的Dexel模型组成。以z向Dexel模型为例,其基本思想是将实体在xoy平面按一定精度划分网格,用网格射线与实体的交点来表示实体。
整个实施过程如下:
1、工件表面由一系列的三角形组成。将工件三维的CAD模型转化为STL文件格式。读取工件的STL文件信息,获得工件的三角面片,包括三角形的顶点坐标和法向方向,组成三维模型。
2、以z向Dexel模型为例,将工件按照一定精度在xoy平面划分网格,z向射线对工件进行离散,射线与组成工件表面的三角形的交点即为工件表面点,射线与三角面片的交点示意图如图2所示。XYZ三个方向均使用上述方法离散,最后可以获得工件毛坯的Tri-Dexel模型,图3为工件的Tri-Dexel模型。
3、基于UG的CAM模块,生成数控加工代码,读取数控加工代码文件,获取刀位点信息以及刀具信息。刀具信息包括刀具长度、刀具半径、刀具类型等。下表1为基于数控加工代码获取的部分加工路径刀位点。
表1
4、根据加工的精度需求,将刀位点插补,离散为子刀位点。将短直线的连续切削转化为子刀位点处的切削。在离散后的子刀位点处,根据刀具信息,建立刀具的Tri-Dexel模型。以球头刀为例,将刀具表面分为底部半球面、球身圆柱面和底部圆面。Dexel射线与刀具表面相交,形成Dexel线段。刀具的Tri-Dexel模型如图4所示。
5、将刀具与工件的复杂的切削运动转化为刀具的Tri-Dexel模型与工件Tri-Dexel模型的布尔求交。在离散后的子刀位点处,实时计算刀具的Tri-Dexel模型与工件Tri-Dexel模型的布尔交集,该交集即为切削几何体。z方向刀具和工件Dexel线段布尔求交运算如图5中(1)-(6)所示,切削过程中实时更新工件,最终工件如图6。工件与刀具切削示意图如图7中(a)-(c)所示,在某刀位点,切除的切削几何体的Tri-Dexel模型如图8所示。
6、将切削几何体对应的球头刀表面网格化,类似于用经线、纬线的圆弧确定地球上的位置和方向,用与刀轴垂直的环绕球头的一系列长度不等的圆,和垂直于圆且长度相等的
7、基于切削几何体Tri-Dexel模型,建立切削几何体Tri-Dexel模型的长方体包围盒,并且按照切削几何体Tri-Dexel模型的精度在三个方向将包围盒离散化,划分为小立方体。在切削几何体对应的刀具球心处,引出一簇经过球面网格的射线,与切削几何体包围盒相交,从交点所在的小立方体处开始,沿着射线方向搜索位于切削几何体边界的包围盒小立方体。将小立方体中的Dexel线段的端点相连接,形成切削几何体的虚拟边界。切削几何体包围盒及其网格化示意图如图10所示。切削几何体虚拟边界示意图如图11所示。
8、计算射线与切削几何体虚拟边界的交点,两个交点之间的距离为径向切削厚度。用矩阵来存储径向切削厚度,矩阵的行数表示天顶角θ,矩阵的列数表示方位角
以刀具球心为原点,将刀具坐标系(直角坐标系,表达为(x,y,z))转化为球坐标系(r,θ,φ),其中θ为天顶角,原取值范围为(0°,180°),φ为方位角,原取值范围为(0°,360°),此处根据需求,取θ范围为(91°,180°),φ范围为(1°,360°),θ和φ每变动一度引出一条射线,共可以引出90*360根射线。
9、将径向切削厚度组成的矩阵归一化,将实际切削数据映射至0-65535。表2为归一化前的部分数据,表3为归一化后的部分数据。
表2
表3
10、将归一化径向切削厚度矩阵转化为灰度图,灰度图的像素值代表径向切削厚度数值的大小,灰度图像素值的横纵坐标分别对应矩阵元素的行下标、列下标,也就是网格在球坐标系下的θ、
切削几何体存储了诸多的信息(切深、切宽、进给速度、进给方向、刀具-工件接触域等),但其格式不固定,难以处理和应用于深度学习,但是其转换为图像表达后,大小和格式固定,就可以方便处理和应用于深度学习。本发明灰度图与主轴功率、切削力、刀具颤振等存在复杂且紧密的非线性关系,可以通过深度学习的方法找到其联系,用作主轴功率、切削力、刀具颤振的预测等。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种切削几何体的图像表达方法
- 一种基于视觉注意力机制的图像特征表达方法及系统