一种基于车联网的共享停车服务方法及系统
文献发布时间:2023-06-19 11:21:00
技术领域
本申请涉及车联网停车管理技术领域,尤其涉及一种基于车联网的共享停车服务方法及系统。
背景技术
随着社会经济的发展和人们生活水平的提高,机动车和车位已经成为了人们生产和生活的重要组成部分,给人们的生产和生活带来了无尽的便利。但是,随着我国汽车工业的崛起和人们生活的富裕,我国大量居民选择购买机动车作为日常代步。我国对于机动车的消费,虽然极大的拉动了我国的消费,但是同样也使得我国的机动车保有量大大增加,使得机动车数量急速增长,由此导致的停车难问题日益凸显。
目前,基于物联网的停车管理方式一般是通过采集停车状态及车位信息,并根据车位预定与信息发布数据进行车位预定、场内场外诱导以及指示最优停车位,最终采用付费接口用于完成车停费用的支付。或者基于大数据技术和互联网,实现城市级智慧停车管理,一方面通过线上智慧停车诱导系统、线下智慧停车诱导系统实时发布车位供给数据,另一方面将实时泊位信息上传至静态交通大数据处理中心。
现有技术的研究和发展对共享停车服务起到了巨大的推动作用,然而由于现有技术中缺乏对车流量、车流向、车滞留的分析和预测,因此无法实现合理而有效的车辆行为预测,从而不能实现停车诱导和共享停车服务,使得整体的车位利用效率不能满足具体的使用需求。
发明内容
本申请提供了一种基于车联网的共享停车服务方法及系统,以解决传统共享停车服务管理中不能实现停车诱导和共享停车服务,使得整体的车位利用效率不能满足具体的使用需求的问题。
本申请解决上述技术问题所采取的技术方案如下:
一种基于车联网的共享停车服务方法,包括以下步骤:
获取实时车位、车辆和车辆行为数据;
基于车辆行为预测算法结合所述车辆和车辆行为数据对车辆行为进行预测,得到预测结果;
根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导。
可选的,所述获取实时车位、车辆和车辆行为数据,包括:
采集智能摄像头和智能车位检测传感器所监测到的车位、车辆以及车辆行为实时数据。
可选的,通过地磁传感器对车位数据进行实时监测,获取实时车位数据;
通过智能传感器对车辆和车辆行为数据进行主动感知,获取车辆和车辆行为数据。
可选的,所述方法还包括:
通过软件对各个智能传感器进行注册,对传感数据进行区别标记;
通过监测和控制每个注册后智能传感器的状态,对各停车场车位数据和车辆行为数据进行主动感知;
通过数据通讯装置,实现车位数据和车辆行为数据的采集与传输。
可选的,所述车辆和车辆行为数据包括车流量、车流向和车滞留数据。
可选的,所述方法还包括:
对所述车位、车辆和车辆行为数据进行数据存储和数据处理;
采用基于视频图像的车辆行为预测算法对车辆行为进行预测,得到预测结果。
可选的,所述采用基于视频图像的车辆行为预测算法对车辆行为进行预测,得到预测结果,包括:
设定目标检测区域;
读取目标检测区域内智能传感器的视频序列,利用高斯混合模型建立背景模型;
采用智能传感器中当前帧图像减去背景模型进行背景差分,获得运动目标,所述运动目标为目标检测区域的运动车辆;
利用形态学图像处理方法对所述运动目标进行处理;
通过对目标检测区域内一段时间的车辆位置数据进行统计分析,预测出目标检测区域内的车辆行为。
可选的,所述根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导,包括:
基于车辆行为预测结果和目标区域中的车位数据,根据时间最短和路径最优的组合方法,给出停车场名称、位置、车位等停车诱导信息。
一种基于车联网的共享停车服务系统,包括数据感知与采集层,数据传输层,云服务层和执行层;
所述数据感知与采集层,用于获取实时车位、车辆和车辆行为数据,并通过所述数据传输层将车辆和车辆行为数据传输至所述云服务层;
所述数据传输层,用于传输实时车位、车辆和车辆行为数据;
所述云服务层,用于接收所述数据,并基于车辆行为预测算法结合所述车辆和车辆行为数据对车辆行为进行预测,得到预测结果;
所述执行层,用于根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导。
可选的,所述数据传输层采用ZigBee或以太网对实时车位、车辆以及车辆行为数据进行传输。
本申请提供的技术方案包括以下有益技术效果:
本申请提供的一种基于车联网的共享停车服务方法及系统,首先获取实时车位、车辆和车辆行为数据;在此基础上,基于车辆行为预测算法结合所述车辆和车辆行为数据对车辆行为进行预测,得到预测结果;最后根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导。本申请中的技术方案不仅能够对车位和车辆行为数据进行实时监控,而且能够通过基于视频图像的车辆行为预测算法以及基于规则的最优路径方法对车辆行为进行智能诱导,最终实现停车诱导和共享停车。
附图说明
为了更清楚地说明本申请的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
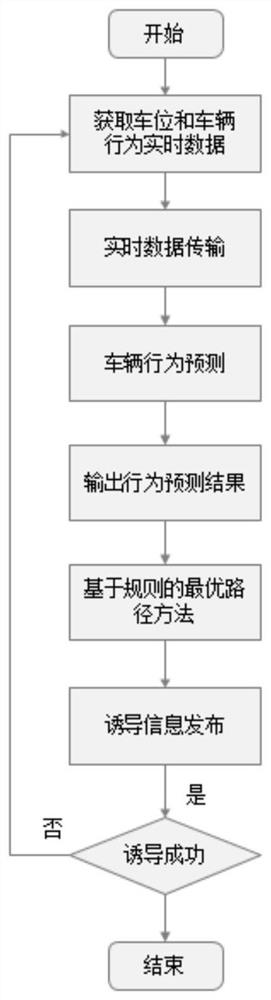
图1为本申请实施例提供的基于车联网的共享停车服务方法总体流程图;
图2为本申请实施例提供的数据感知与采集过程的流程图;
图3为本申请实施例提供的跨网络数据融合与传输流程图;
图4为本申请实施例提供的云服务层操作流程图;
图5为本申请实施例提供的执行层操作流程图。
具体实施方式
为了使本领域技术人员更好地理解本申请中的技术方案,下面将结合本申请实施例中的附图,对申请实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅是本申请的一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
近年来,随着物联网技术的高速发展,借助地磁传感器获取车位数据,借助智能摄像机在共享停车服务系统中的应用,使设备具有主动感知的能力,以获取车流量、车流向、车滞留数据,本申请中的技术方案在此基础上,将数据传输至车联网云端,进而对数据进行分析和预测,以实现停车诱导和共享停车目标。可见,在物联网环境下有效利用车流量、车流向、车滞留数据,通过合理而有效的数据传输方法和行为预测方法,提升车位利用效率,具有重要的实际意义:增强对车位使用的管理能力,从而提高车位利用率、提高车主停车体验,为国家建立可持续发展社会提供技术支持。
以下以具体的实施方式对本申请中的技术方案进行详细的解释说明。
参见图1,本实施例提供了一种基于车联网的共享停车服务方法,目的是通过对多种网络、多种协议数据进行采集和融合,实现对车流量、车流向、车滞留的实时分析和预测,基于车辆行为预测结果,结合基于规则的最优路径方法,提供停车诱导和共享停车服务,以提高车位利用率、车主停车体验,具体实施步骤如下:
S1:获取实时车位、车辆和车辆行为数据。
参见图2,将智能传感技术、无线传感网络技术应用到共享停车服务系统,通过采集智能摄像头和智能车位检测传感器所监测到的车位、车辆以及车辆行为实时数据,具体包括以下步骤:
S11:通过地磁传感器对车位数据进行实时监测,获取实时车位数据,通过智能传感器对车辆和车辆行为数据进行主动感知,获取车辆和车辆行为数据;
S12:在智能传感器主动感知过程中,首先,通过软件对各个智能传感装置进行注册,实现对传感数据的区别标记;其次,通过监测和控制每个注册传感器的状态,实现对各停车场车位数据和车辆行为数据的主动感知;最后,通过数据通讯装置,实现车位数据和车辆行为数据的采集与传输。作为一种实施方式,所述车辆和车辆行为数据包括车流量、车流向和车滞留数据。
参照图3,给出了共享停车服务方法中数据传输的方式。基于数据感知与采集将获取的实时车位和车辆行为数据接入到通信网络中,依靠有线或无线的传输方式,实现实时信息的交互和共享。在基于车联网的共享停车服务系统中,利用ZigBee、以太网对实时车位数据和车辆行为数据进行传输,同时通过MQTT或以太网传送至车联网云端,具体包括以下方面:
(1)在共享停车服务系统中,采用ZigBee和4G/5G技术对智能传感网络中车位传感器的数据进行实时传输。
(2)在共享停车服务系统中,采用以太网技术对智能传感网络中车辆行为传感器(智能摄像头)的数据进行实时传输。
(3)在共享停车服务系统中,采用4G/5G技术对处理过的车位信息进行实时传输,通过停车诱导显示屏显示附近停车场位置和车位信息。
S2:基于车辆行为预测算法结合所述车辆和车辆行为数据对车辆行为进行预测,得到预测结果。
参照图4,给出了一种基于视频图像的车辆行为预测方法。为了在车联网云服务端对车辆行为进行预测,首先需要对原始数据进行数据存储和数据处理;然后采用基于视频图像的车辆行为预测算法对车辆行为进行预测,具体包括以下步骤:
设定目标检测区域;
读取目标检测区域内智能传感器的视频序列,利用高斯混合模型建立背景模型;
采用智能传感器中当前帧图像减去背景模型进行背景差分,获得运动目标,所述运动目标为目标检测区域的运动车辆;
利用形态学图像处理方法对所述运动目标进行处理;
通过对目标检测区域内一段时间的车辆位置数据进行统计分析,预测出目标检测区域内的车辆行为。
具体包括以下步骤:
S21:首先设定目标检测区域,然后读取智能摄像机的视频序列,利用GMM建立背景模型,再用智能传感器中当前帧图像进行背景差分来获得运动目标;
S22:为了取得更为精确的目标轮廓,通过中值和高斯滤波进行去噪处理,然后通过腐蚀、膨胀和开闭运算处理前景图像得到更为完整的运动目标;
S23:定义新目标出现的控制参数,并加入到目标跟踪列表中,所述新目标为需要进行车辆行为智能诱导的目标车辆,所述目标跟踪列表为需要进行车辆行为智能诱导目标车辆序列;
S24:从目标跟踪列表中,用Harri s角点检测方法对新目标进行标识并作为跟踪的模板,接着利用稀疏光流对角点进行运动估计,来预测下一帧图像中对应的角点的位置,然后对角点进行拟合、聚类来确定目标的质心坐标和尺寸大小。
S25:由于目标是不断变化的,加上新的目标,减去消失的目标,通过对一段时间内的车辆位置数据进行统计分析,预测出目标检测区域内的车辆行为,包括车流量、车流向以及车滞留。
S3:根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导。
参照图5,基于车辆行为预测结果和目标区域中的车位数据,根据时间最短和路径最优的组合方法,给出停车场名称、位置、车位等停车诱导信息。
另外,本申请实施例还提供了一种基于车联网的共享停车服务系统,包括数据感知与采集层,数据传输层,云服务层和执行层;
所述数据感知与采集层,用于获取实时车位、车辆和车辆行为数据,并通过所述数据传输层将车辆和车辆行为数据传输至所述云服务层;
所述数据传输层,用于传输实时车位、车辆和车辆行为数据;
所述云服务层,用于接收所述数据,并基于车辆行为预测算法结合所述车辆和车辆行为数据对车辆行为进行预测,得到预测结果;
所述执行层,用于根据所述预测结果,基于规则的最优路径方式对车辆行为进行智能诱导。
其中,数据感知与采集层是实现共享停车服务系统的基础。该层为用户环境配置相应的智能传感器和智能摄像机,并通过传感器管理系统使各种用户资源具有主动感知周围环境的能力。同时,通过建立有线或无线传感网络向云端提供实时车位和车辆行为数据。
数据传输层将获取的实时车位和车辆行为数据接入到通信网络中,依靠有线或无线的传输方式,同时将数据通过MQTT或以太网传送至云端。
云服务层是基于视频图像的车辆行为预测算法对车辆行为进行预测。
执行层是根据车辆行为的预测结果,对车辆行为进行智能诱导。
作为一种实施方式,所述数据传输层采用ZigBee或以太网对实时车位、车辆以及车辆行为数据进行传输。
综上,与现有技术相比,本申请技术方案的优点在于:能够将现有的信息技术、传感技术以及物联网技术应用到城市智慧诱导停车中,实现对车位和车辆行为数据的实时感知与采集;进而通过有线或无线的传输方式,将采集到的车位和车辆行为传送至车联网云端;并通过基于视频图像的车辆行为预测算法,对车流量、车流向、车滞留数据进行预测;最后根据预测结果结合基于规则的最优路径方法,最终实现停车诱导和共享停车。因此,本发明不仅做到了对车位和车辆行为进行监视,而且通过基于视频图像的车辆行为预测算法和基于规则的最优路径方法对车辆行为进行智能诱导,最终实现共享停车。
需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
应当理解的是,本申请并不局限于上面已经描述并在附图中示出的内容,并且可以在不脱离其范围进行各种修改和改变。本申请的范围仅由所附的权利要求来限制。
- 一种基于车联网的共享停车服务方法及系统
- 一种基于5G车联网的共享汽车停车基站