重力基准网数据处理方法及系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及计算机技术领域,尤其涉及一种重力基准网数据处理方法及系统。
背景技术
重力基准网是一个国家或区域的重力起算基准,在地震监测、矿产资源的开发、武器发射等工程应用与科学研究中发挥着重要作用。重力基准网建设中涉及的外业测量需要耗费大量的人力、物力,获得的观测资料非常珍贵,内业的数据处理对外业数据进行深加工则尤为关键。
重力网数据处理可分为两个部分:数据预处理与平差处理。数据预处理可分为绝对重力测量数据预处理和相对重力测量数据预处理。数据平差包括对预处理后的绝对、相对观测数据进行粗差探测与剔除、平差函数模型确定、平差方法选择及观测权值确定。然而,由于日、月位置的变化,引起了地球上重力会发生一些周期性的变化,也就是固体潮影响;同时在进行平差处理前,尽管数据经过了预处理,数据质量受到段差精度指标的约束,同时还受到环闭合限差的约束。因为测量的偶然性,难免仍然存在一些偏离常规的特殊情况,即数据中存在误差的可能性很大。从测量平差的角度来看,上述情况中数据中存在粗差。粗差就是较大的观测误差绝对值。对于多大的误差算是粗差,是一个很模糊的概念。在数据处理过程中,对观测值的标准化残差(残差与对应中误差的比值)作为指标,如|v
发明内容
针对现有技术中存在的问题,本发明实施例提供一种重力基准网数据处理方法及系统。
第一方面,本发明实施例提供一种重力基准网数据处理方法,包括:
根据相对重力测量点的位置,确定第一潮汐因子;
根据绝对重力测量点的位置,确定第二潮汐因子;
基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项;
基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项;
基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
进一步地,所述基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理,具体包括:
基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据建立观测方程,确定平差参数类型及数量;其中平差参数数量为仪器数量与重力点数量之和;
基于所述观测方程确定与所述改正后的相对重力测量数据对应的第一权值和与所述改正后的绝对重力测量数据对应的第二权值。
进一步地,所述方法还包括:
基于粗差与残差之间模糊逻辑关系,选择隶属函数优化第一权值和第二权值。
进一步地,还包括:
根据交通工具或仪器型号对所述改正后的相对重力测量数据对应的第一权值进行更新,得到第三权值。
第二方面,本发明实施例提供了一种重力基准网数据处理系统,包括:
第一确定模块,用于根据相对重力测量点的位置,确定第一潮汐因子;
第二确定模块,用于根据绝对重力测量点的位置,确定第二潮汐因子;
第一更正模块,用于基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项;
第二更正模块,用于基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项;
平差处理模块,用于基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
进一步地,所述平差处理模块,具体用于:
基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据建立观测方程,确定平差参数类型及数量;其中平差参数数量为仪器数量与重力点数量之和;
基于所述观测方程确定与所述改正后的相对重力测量数据对应的第一权值和与所述改正后的绝对重力测量数据对应的第二权值。
进一步地,所述系统还包括:
选择模块,用于基于粗差与残差之间模糊逻辑关系,选择隶属函数优化第一权值和第二权值。
进一步地,还包括:
更新模块,用于根据交通工具或仪器型号对所述改正后的相对重力测量数据对应的第一权值进行更新,得到第三权值。
第三方面,本发明实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上第一方面所述的重力基准网数据处理方法的步骤。
第四方面,本发明实施例还提供了一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上第一方面所述的重力基准网数据处理方法的步骤。
由上述技术方案可知,本发明实施例提供的重力基准网数据处理方法及系统,通过确定第一潮汐因子;确定第二潮汐因子;基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。可见本实施例顾及了地理位置的不同将潮汐因子作为变量参与数据改正,从而在数据预处理中考虑固体潮因子所带来的影响,有利于提高重力基准网数据处理精度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明一实施例提供的重力基准网数据处理方法的流程示意图;
图2为本发明一实施例提供的模拟设计的重力基准网测点和测段分布示意图;
图3为本发明一实施例提供的相对重力测量值改正流程示意图;
图4为本发明一实施例提供的重力基准网平差处理流程示意图;
图5为本发明一实施例提供的四种隶属函数的差异对比示意图;
图6为本发明一实施例提供的重力基准网数据处理系统的结构示意图;
图7为本发明一实施例提供的电子设备的实体结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。下面将通过具体的实施例对本发明提供的重力基准网数据处理方法进行详细解释和说明。
参见图3,涉及相对重力测量值的改正;另一方面是绝对重力测量值的改正(见(18)式)等两个方面。具体如下:
S1、仪器读数R换算成毫伽值。对于LCR-G仪器类型将仪器读数R转换为相应的毫伽值。
g
式(1)中:R—仪器读数,小数点前为计数器读数(格数),小数点后为测微轮读数;g
R
F
df
S2、计算气压改正dg
1)若气压读数为帕
dg
式(2)中:P—测点实测气压值(单位为:百帕[hPa]);
P
P
其中,dg
2)若气压读数为毫米汞柱
dg
式(4)中:P—测点实测气压值(单位:毫米/汞高);
P
P
其中,H—测点的海拔高程,单位:米。dg
S3、计算仪器高改正dg
仪器高改正计算公式为:
dg
式(6)中:dg
V
h—仪器高,单位:米。
为了与绝对重力测量的观测精度保持一致,应采用实测梯度值,没有实测垂直梯度的重力点,则采用正常重力垂直梯度值308.6×10-8m·s-2/m。
S4、计算潮汐改正dg
潮汐改正值dg
dg
式(7)中:
其中,
S5、初步观测值的计算
将g
g
S6、漂改正的计算
1)零漂率k的计算公式为:
式(12)中:
t
当测线采用对称观测顺序(A-B-C-B-A)时,只用起始点的往、返测的初步观测值计算一个零漂率。
2)零漂改正计算公式:
dg
式(13)中:
dg
Δt—测点的观测时间与起始点的观测时间之差。
当测线观测存在静掉格时,
S7、最后观测值的计算
把初步观测值g
g
S8、重力段差的计算
往测段差
返测段差
段差最后观测值Δg
式(17)中:
Δg
关于绝对重力测量观测值的改正主要包括加入固体潮改正
δg
δg
g
改正的流程与相对重力数据处理流程基本一致。首先输入外业观测的绝对重力值,其次是进行(18)式的各项改正。最后得到墩面的绝对重力值。
参见图4,①起算数据是经过预处理后的相对重力测量与绝对重力测量数据。
②确定待求解的参数类型及数量。对重力基准网可采用间接平差法,一方面可将基准点、基本点、引点(如果有)的重力值作为未知数;另一方面考虑仪器因素的影响,可将仪器的一次项、二次项、周期误差项系数均作为待求解的参数。
③根据步骤②确定的未知参数,列立观测方程或误差方程。
1)对绝对重力观测值而言,其绝对观测误差方程:
式(19)中:
g
2)相对重力测量误差方程。采用经过固体潮改正、海潮改正、气压改正、仪器高改正、零漂改正后,对一台仪器在i点和j点之间的段差观测值的误差方程为:
式(20)中:
g
④平差计算。
采用相对测量观测量与绝对测量观测量,依据误差方程式(19)和式(20),形成矩阵形式误差方程:
V=AX-L P (21)
式(21)中:V为残差向量;A为系数矩阵;X为未知向量;L为观测向量;P为权矩阵。最小二乘解为:
其未知数的协因数阵:
单位权方差:
依据式(25)计算等价权。
⑤平差结果确定。若权值不需调整,则结束计算。若权值需要调整,返回式(21)进行重新解算。直到满足收敛条件输出式(26)、(27)结束。
IGG III的等价权定义如下:
式中k
可以得到如下未知参数估计及其协方差矩阵为:
其中,
上述迭代的过程如下:
1)由初始解求得
2)如果定义第k次迭代的残差为V
3)求解第k+1次迭代参数估值
4)判断
本实施例,一方面未顾及潮汐因子随地理位置的不同发生变化对重力观测值的影响;一方面依据经验值确定标准化残差的取值范围,即确定k
本发明实施例的目的如下:(1)考虑潮汐因子随地理位置的不同发生变化对重力观测值的影响,提高相对重力测量、绝对重力测量数据预处理精度。(2)改进依据经验确定标准化残差的取值范围的计算方案。即确定k
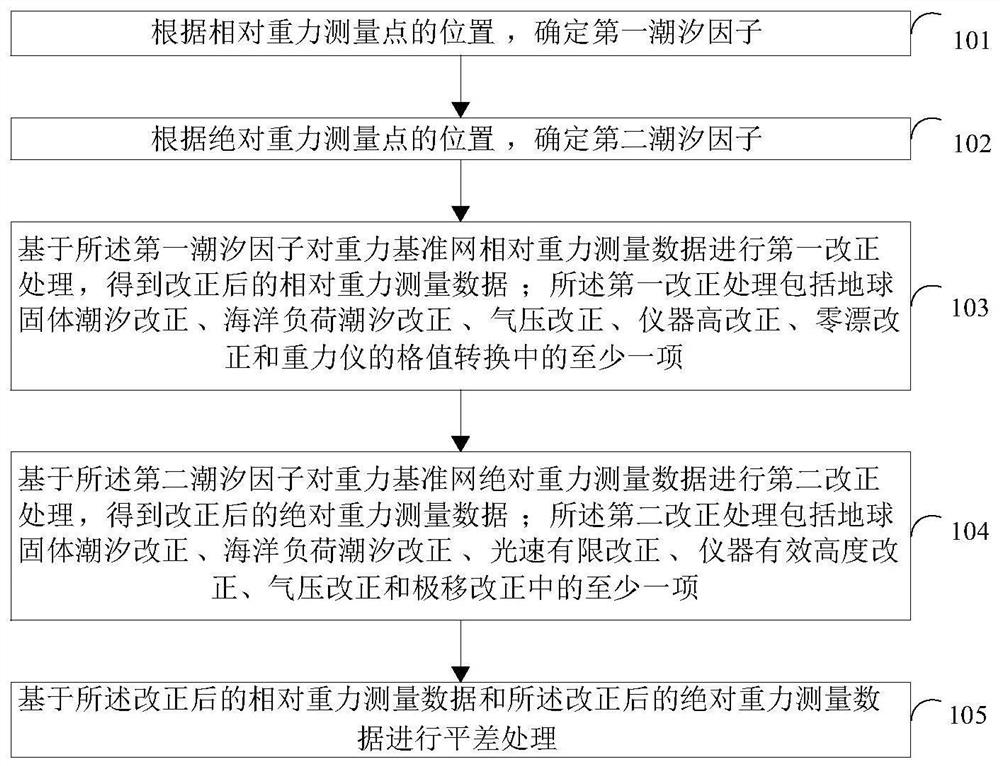
图1为本发明一实施例提供的重力基准网数据处理方法的流程示意图;如图1所示,该方法包括:
步骤101:根据相对重力测量点的位置,确定第一潮汐因子。
在本步骤中,需要说明的是,首先收集整理我国境内的固定重力台站关于潮汐因子测定的数据资料。制作包含台站名称、坐标及台站潮汐因子的数据文件,从而根据相对重力测量点的位置处的潮汐因子采用上述数据文件中重力台站最近的潮汐因子。
可见,在本步骤中,顾及地理位置的不同,从而根据相对重力测量点的位置,确定第一潮汐因子。
步骤102:根据绝对重力测量点的位置,确定第二潮汐因子。
同步骤101,在本步骤中根据绝对重力测量点的位置处的潮汐因子采用上述数据文件中重力台站最近的潮汐因子。
可见,在本步骤中,顾及地理位置的不同,从而根据绝对重力测量点的位置,确定第二潮汐因子。
步骤103:基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项。
在本实施中,举例来说,依据步骤101确定的第一潮汐因子,对相对重力测量数据进行地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正、重力仪的格值转换(如LCR重力仪),得到改正后的相对重力测量观测值。
步骤104:基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项。
在本实施中,举例来说,依据步骤102确定的第二潮汐因子,对绝对重力测量数据地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正、极移改正,得到改正后的绝对重力测量观测值。
步骤105:基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
在本步骤中,需要说明的是,平差处理可以采用弱基准原则,即该网平差时不固定任何重力点的重力测量数据,所有绝对重力观测值及相对重力观测值都赋以适当的权,都作为变量参与平差而得到相应的改正数,足以满足当时的重力测量要求。采用“弱基准”的方式,对绝对观测量及相对观测量将赋以适当的权进行平差,来减弱两者精度不匹配的影响。在沿海省市的重力网数据处理中,用抗差等价权来调整相对重力的权、重力仪参数的取舍。其中,抗差估计的核心是按照权值将观测值进行正常观测值、可利用观测值和粗差观测值:权值大小不变的为正常观测值;对残差较大的观测值进行降权处理,作为可利用观测值;而权值降为零的观测值为粗差观测值,在处理中将弃之不用避免影响解算结果。最小截断二乘法的抗差方案中,处理含有粗差的大样本量数据处理效率不高;最小二乘估计不具有抗干扰性,抗差最小二乘估计通过等价权把抗差估计与最小二乘法结合起来;等价权的选取有L1法、German-McClure法、Danish法、Huber法IGG法和IGG III等多种方法。
在本步骤中,需要说明的是,平差处理还可以采用:建立观测方程,确定平差参数类型及数量,重点确定仪器参数数量选择的依据;确定相对重力测量、绝对重力测量数据的权,依据交通工具或仪器型号对相对重力测量数据的进一步定权;顾及粗差与残差之间模糊逻辑关系的稳健估计。
在本实施例中,需要说明的是,由于日、月位置的变化,导致地球上重力会发生一些周期性的变化,也就是固体潮影响。在相对重力测量数据的预处理过程中,这种影响较为明显,涉及到的地球固体潮改正中用到固体潮改正因子;绝对重力测量数据同样受到固体潮的影响;因此在本实施例中在数据预处理的过程中将固体潮改正因子当做一个常数使用。
为了更好地理解本实施例,下面进一步阐述本发明实施例的内容,但本发明不仅仅局限于下面实施例:
①收集重力基准网相对重力测量、绝对重力测量观测数据。
②依据相对重力测量点的位置,确定潮汐因子。对相对重力测量数据进行地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正,重力仪的格值转换(针对LCR重力仪)。
③依据绝对重力测量点的位置,确定潮汐因子。对绝对重力测量数据地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正、极移改正。
④建立观测方程,确定平差参数类型及数量,重点确定仪器参数数量选择的依据。
⑤确定相对重力测量、绝对重力测量数据的权,依据交通工具或仪器型号对相对重力测量数据的进一步定权。
⑥顾及粗差与残差之间模糊逻辑关系的稳健估计。
⑦设计模拟数据,测试验证方案。
在本实施例中,参见图2,通过模拟设计了简单的重力基准网,并与真值进行对比,确定了本发明实施例的可行性与科学性;图2是模拟设计的重力基准网测点、测段分布示意图,图2中A点表示进行了绝对重力观测的基准点。B、C与D点表示相对重力测量联测的基本点。D1、D2、D3、D4、D5表示在基准点与基准点、基准点与基本点、基本点与基本点之间的重力段差。
在本实施例中,需要说明的是,重力基准网为国民经济发展、灾害预测预警、国防安全提供重要支撑。随着经济社会的发展,建立高精度重力基准的需求也越来越迫切。本发明实施例拟克服传统处理方案的缺陷,采用优化潮汐因子的选择方式,实现提升重力基准网数据处理精度。
由上面技术方案可知,本发明实施例提供的重力基准网数据处理方法,通过确定第一潮汐因子;确定第二潮汐因子;基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。可见本实施例顾及了地理位置的不同将潮汐因子作为变量参与数据改正,从而在数据预处理中考虑固体潮因子所带来的影响,有利于提高重力基准网数据处理精度。
在上述实施例基础上,在本实施例中,所述基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理,具体包括:
基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据建立观测方程,确定平差参数类型及数量;其中平差参数数量为仪器数量与重力点数量之和;
基于所述观测方程确定与所述改正后的相对重力测量数据对应的第一权值和与所述改正后的绝对重力测量数据对应的第二权值。
在本实施例中,平差参数数量为仪器数量与重力点数量之和,即将仪器参数作为平差参数,从而明确确定仪器参数个数选择原则,有利于进一步提升重力基准网数据处理精度;需要说明的是,平差参数类型是指:仪器与重力点。平差参数的数量是仪器参数(比如一次项、二次项或周期项等)与重力点数据之和。
在上述实施例基础上,在本实施例中,所述方法还包括:
基于粗差与残差之间模糊逻辑关系,选择隶属函数优化第一权值和第二权值。
在本实施例中,采用基于粗差与残差之间模糊逻辑关系,选择隶属函数优化第一权值和第二权值,即顾及粗差与残差之间模糊逻辑关系,选择合适的隶属函数优化观测值的权,从而避免依据经验值确定标准化残差的取值范围,对观测值的权进行调整或弃用观测值,能够优化粗差评价准则有利于进一步提升重力基准网数据处理精度。
在上述实施例基础上,在本实施例中,还包括:
根据交通工具或仪器型号对所述改正后的相对重力测量数据对应的第一权值进行更新,得到第三权值。
在本实施例中,交通工具举例来说,如汽车、飞机、轮船;仪器型号举例来说,如LCR型仪器G922,Burris型仪器B051,CG-5型C0053等。
在本实施例中,未考虑多种类型仪器观测数据的权值影响。
在本实施例中,根据交通工具或仪器型号对所述改正后的相对重力测量数据对应的第一权值进行更新,得到第三权值,提升权值的精准度,从而提升重力基准网数据处理精度;进一步地,提高武器的打击精度、改善地质灾害的预报准确性、促进石油、天然气矿藏等自然资源的勘探利用。
为了更好地理解本实施例,下面进一步阐述本发明实施例的内容,但本发明不仅仅局限于下面实施例。
S1、收集LCR-G,BURRIS、CG-5、CG-6等相对重力仪采集的相对重力测量观测数据;收集FG-5、A10等绝对重力仪采集的绝对重力测量观测数据。
S2、收集整理我国境内的固定重力台站关于潮汐因子测定的数据资料。制作包含台站名称、坐标及台站潮汐因子的数据文件。
S3、相对重力测量点的位置、绝对重力测量点的位置处的潮汐因子采用上述数据文件中重力台站最近的潮汐因子。
S4、依据步骤S3确定潮汐因子,对相对重力测量数据进行地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正,重力仪的格值转换(如LCR重力仪),得到改正后的相对重力测量观测值。
S5、依据步骤S3确定潮汐因子,对绝对重力测量数据地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正、极移改正,得到改正后的绝对重力测量观测值。
S6、建立观测方程,确定平差参数类型及数量。平差参数将基准点、基本点、引点(如果有)的重力值作为未知数;
绝对观测误差方程:
在相对重力测量观测数据中,同时考虑仪器一次项、二次项、部分周期误差项系数均作为待求解的参数。即式(20)中X
S7、确定相对重力测量、绝对重力测量数据的初始权,分别为式(19)与(20)中p
S8、在计算过程中对权的更新,顾及粗差与残差之间模糊逻辑关系,而不是依据经验值k
具体步骤如下:
1)采用类似式(25)中计算v
2)找出最大的|w
3)按照式(28)计算
4)按照式(29)和(30)计算t
有了相对影响向量T与M后,就可以确定μ
5)按照式(32)计算观测误差Δ
6)选出最大的μ
其中
7)结束迭代,输出结果。
S9、设计模拟数据,测试验证方案。
本实施例,一方面考虑潮汐因子随地理位置的不同发生变化对重力观测值的影响,顾及了地理位置的不同,将潮汐因子作为变量参与固体潮改正,提高相对重力测量、绝对重力测量数据预处理精度(具体详见步骤S2、S3、S4、S5)。一方面明确了仪器参数作为平差参数的个数确定原则(具体详见步骤S6)。一方面避免依据经验值确定标准化残差的取值范围,对观测值的权进行调整或弃用观测值。而是顾及粗差与残差之间模糊逻辑关系,选择合适的隶属函数优化观测值的权,提升重力基准网数据处理精度(具体详见步骤S8)。
依据本发明上述实施例的方案,参见图2模拟设计重力网分布图。起算数据说明如下:假定H
表1重力基准网测段段差平均值及路线长度
从表2可以看出,对于相同的模拟数据,本发明在顾及粗差与残差之间模糊逻辑关系时,采用隶属函数,数据解算精度最高,且改正量更接近粗差的量级。抗差估计是有效的抵抗粗差影响的一种方法,最小二乘则对粗差毫无抵抗之力。在使用模糊逻辑的隶属函数过程中发现GaussMF法对粗差定位不准确,在实际使用中可优先考虑使用WHUMF法、TriangleMF法与BellmF法。
表2对不同方法成果的检核分析,单位10
在图5中给出了WHUMF、GaussMF、TriangleMF与BellmF等四个隶属函数的差异。
图6为本发明一实施例提供的重力基准网数据处理系统的结构示意图,如图6所示,该系统包括:第一确定模块201、第二确定模块202、第一更正模块203、第二更正模块204和平差处理模块205,其中:
其中,第一确定模块201,用于根据相对重力测量点的位置,确定第一潮汐因子;
第二确定模块202,用于根据绝对重力测量点的位置,确定第二潮汐因子;
第一更正模块203,用于基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项;
第二更正模块204,用于基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项;
平差处理模块205,用于基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
在上述实施例基础上,在本实施例中,所述平差处理模块,具体用于:
基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据建立观测方程,确定平差参数类型及数量与重力点数量之和;其中平差参数数量为仪器数量;
基于所述观测方程确定与所述改正后的相对重力测量数据对应的第一权值和与所述改正后的绝对重力测量数据对应的第二权值。
在上述实施例基础上,在本实施例中,所述系统还包括:
选择模块,用于基于粗差与残差之间模糊逻辑关系,选择隶属函数优化第一权值和第二权值。
在上述实施例基础上,在本实施例中,还包括:
更新模块,用于根据交通工具或仪器型号对所述改正后的相对重力测量数据对应的第一权值进行更新,得到第三权值。
本发明实施例提供的重力基准网数据处理系统具体可以用于执行上述实施例的重力基准网数据处理方法,其技术原理和有益效果类似,具体可参见上述实施例,此处不再赘述。
基于相同的发明构思,本发明实施例提供一种电子设备,参见图7,电子设备具体包括如下内容:处理器301、通信接口303、存储器302和通信总线304;
其中,处理器301、通信接口303、存储器302通过通信总线304完成相互间的通信;通信接口303用于实现各建模软件及智能制造装备模块库等相关设备之间的信息传输;处理器301用于调用存储器302中的计算机程序,处理器执行计算机程序时实现上述各方法实施例所提供的方法,例如,处理器执行计算机程序时实现下述步骤:根据相对重力测量点的位置,确定第一潮汐因子;根据绝对重力测量点的位置,确定第二潮汐因子;基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项;基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项;基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
基于相同的发明构思,本发明又一实施例还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现以执行上述各方法实施例提供的方法,例如,根据相对重力测量点的位置,确定第一潮汐因子;根据绝对重力测量点的位置,确定第二潮汐因子;基于所述第一潮汐因子对重力基准网相对重力测量数据进行第一改正处理,得到改正后的相对重力测量数据;所述第一改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、气压改正、仪器高改正、零漂改正和重力仪的格值转换中的至少一项;基于所述第二潮汐因子对重力基准网绝对重力测量数据进行第二改正处理,得到改正后的绝对重力测量数据;所述第二改正处理包括地球固体潮汐改正、海洋负荷潮汐改正、光速有限改正、仪器有效高度改正、气压改正和极移改正中的至少一项;基于所述改正后的相对重力测量数据和所述改正后的绝对重力测量数据进行平差处理。
以上所描述的系统实施例仅仅是示意性的,其中作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如ROM/RAM、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分的方法。
此外,在本发明中,诸如“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
此外,在本发明中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
此外,在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 重力基准网数据处理方法及系统
- 航空重力测量数据处理方法及系统