一种心肺复苏机器人
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于救援机器人领域,具体地说是一种心肺复苏机器人。
背景技术
地震、海啸等意外事故的发生常常会导致建筑物倒塌产生废墟,建筑物里面的人员会被困于废墟之内,救援被困在废墟下的幸存者是一项非常紧迫的任务。为了提高救援效率,需大力发展营救技术;由于倒塌的废墟属于非结构环境,一般救援人员不能够进入,即使可以进入,考虑到废墟二次坍塌的危险,救援人员也不会贸然进入。被困人员生命体征极度虚弱,严重者会出现心脏骤停等问题,危及生命,给救援工作带来了极大的困难。
机场车站等场所人员密集地形复杂,现场一般没有救援设备。患有心脏病的乘客在候车过程如果出现心脏病复发,情况比较危险,严重者危及生命。
发明内容
为了解决废墟内部和人员密集场所心脏救治的迫切需求,提高救援效率,保证心脏病复发人员生命体征正常,本发明的目的在于提供一种心肺复苏机器人。该心肺复苏机器人用于紧急救援任务,可以在复杂环境内自由行走,通过携带的心肺复苏作业模块可以对被困人员的心脏实施按压治疗,增加心脏骤停患者心脏和脑的血流,并为后续的除颤、静脉用药、血管重建等起到桥梁承接作用,增加心脏病复发人员的生存机率。
本发明的目的是通过以下技术方案来实现的:
本发明包括车体、摆臂机构、摆臂驱动机构、心肺复苏作业模块及带轮驱动机构,其中车体行进方向的两侧均设有摆臂机构,所述摆臂驱动机构安装在车体内部,该摆臂驱动机构的输出端分别与两侧所述摆臂机构相连,驱动两侧所述摆臂机构同步转动;所述心肺复苏作业模块的一端安装于车体上,另一端为心肺复苏按压执行端;所述车体行进方向的两侧均设有实现机器人整体行进的带轮驱动机构;所述摆臂机构包括摆臂行星轮、摆臂板、凸轮机构、直线运动副及滑轨固定板,所述滑轨固定板与所述摆臂驱动机构的输出端相连,所述摆臂板的一端转动安装有摆臂行星轮,另一端通过所述直线运动副与滑轨固定板连接,所述摆臂行星轮与带轮驱动机构中的驱动履带相连,所述直线运动副在摆臂机构转动过程中通过凸轮机构实现直线运动,进而压紧所述摆臂行星轮,该摆臂行星轮张紧所述驱动履带。
其中:所述直线运动副包括摆臂滑块紧固件、上直线轴承、滑动轴、下直线轴承及弹簧,该上直线轴承通过所述摆臂滑块紧固件安装于所述摆臂板的另一端,所述滑动轴的一端固接于滑轨固定板上,另一端由所述上直线轴承及摆臂滑块紧固件穿过,并连接锁紧螺母,该滑动轴上滑动连接有作为所述凸轮机构施力部件的下直线轴承所述滑动轴上套设有弹簧,该弹簧的两端分别与所述上直线轴承及下直线轴承连接。
所述凸轮机构包括凸轮滚子及凸轮,该凸轮固定在所述车体的外表面上,所述直线运动副固定在凸轮滚子上,所述凸轮滚子与凸轮滚动连接。所述凸轮呈横放的“8”字形。
所述摆臂驱动机构包括摆臂电机、传动机构及摆臂输出轴,该摆臂电机安装于所述车体内,所述摆臂输出轴转动安装于车体上,该摆臂输出轴的两端分别由所述车体穿出,并分别与两侧所述摆臂机构中的滑轨固定板相连;所述摆臂电机的输出端通过传动机构与摆臂输出轴连接,驱动所述摆臂输出轴转动,并带动两侧所述摆臂机构同步转动。
所述传动机构包括蜗杆、蜗轮、主动带轮、从动齿轮及同步带,该蜗杆转动安装于所述车体内,并通过联轴器与所述摆臂电机的输出端相连,所述蜗轮的轮轴转动安装于车体内,该蜗轮与所述蜗杆啮合传动,所述蜗轮的轮轴上连动有主动带轮,该主动带轮与所述蜗轮同步旋转,所述从动齿轮安装于摆臂输出轴上,并通过所述同步带与主动带轮相连。
所述带轮驱动机构包括驱动电机、驱动输出轴、主驱动轮、驱动履带及被动轮,该驱动电机安装于所述车体内部,输出端通过联轴器与转动安装于所述车体上的驱动输出轴的一端相连,所述驱动输出轴的另一端连接有主驱动轮,所述被动轮转动安装于车体上,该被动轮、主驱动轮及所述摆臂行星轮通过驱动履带相连。
所述心肺复苏作业模块包括心肺复苏仪、大摆臂、小摆臂、作业基座、抱爪电机、抱爪、根部驱动模块、中部驱动模块、前部驱动模块及直线电缸,该根部驱动模块安装于所述车体上,所述根部驱动模块的输出端驱动大摆臂转动输出俯仰自由度,所述中部驱动模块安装于大摆臂上,该中部驱动模块的输出端驱动小摆臂转动输出俯仰自由度,所述前部驱动模块安装于作业基座内部,该前部驱动模块的输出端与所述小摆臂相连,所述前部驱动模块通过驱动小摆臂的反作用力驱动所述作业基座转动输出俯仰自由度;所述作业基座的两侧分别安装有抱爪电机,每侧所述抱爪电机的输出轴均连接有抱爪;所述直线电缸安装于作业基座下表面,位于两侧所述抱爪之间,该直线电缸的伸缩杆上安装有所述心肺复苏仪。
所述根部驱动模块、中部驱动模块及前部驱动模块结构相同,均包括关节电机、电机腔体及尾座,所述关节电机安装在电机腔体内部,该关节电机的输出轴由所述电机腔体的一侧伸出,所述尾座与电机腔体另一侧的尾部相连;所述大摆臂及小摆臂均为对称的两根;所述根部驱动模块中的电机腔体安装在车体的顶部,位于左侧的所述大摆臂的上端与中部驱动模块中的电机腔体的一侧固接,下端与所述根部驱动模块中的关节电机的输出轴连接,位于右侧的所述大摆臂的上下两端分别与所述中部驱动模块中的尾座和根部驱动模块中的尾座转动连接,位于左侧的所述小摆臂的前端与所述前部驱动模块中的关节电机的输出轴连接,后端与所述中部驱动模块中的关节电机的输出轴连接,位于右侧的所述小摆臂的前后两端分别与所述前部驱动模块中的尾座和中部驱动模块中的尾座转动连接。
所述抱爪为弧形,两侧所述抱爪通过各自的抱爪电机驱动,将被困人员抱紧固定。
本发明的优点与积极效果为:
1.本发明提出了一种摆臂可伸缩式履带机器人本体,通过摆臂的转动可以使机器人变换不同姿态来攀爬台阶、翻越障碍和跨越沟壑,增强了机器人在复杂环境内的运动能力。
2.本发明搭载心肺复苏作业模块,通过机械臂的运动配合摆臂的转动可以调节心肺复苏仪的位置和角度,机械臂前端安装自适应抱爪机构可以适应不同胸围的人员,在复杂环境内利用抱爪抱紧固定被困人员,对心脏位置实施按压急救治疗。
3.本发明采用模块化设计,结构简单轻便,运动灵活,适应性广泛,易于安装,操控精准。
附图说明
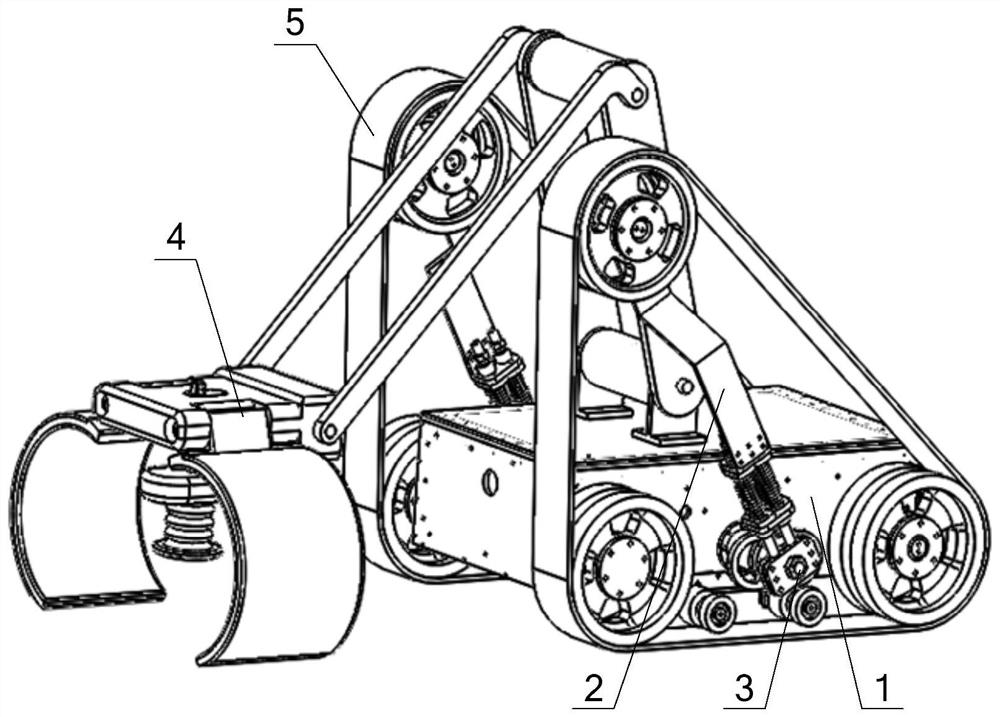
图1为本发明的立体结构示意图;
图2为本发明摆臂机构的结构示意图;
图3为本发明摆臂驱动机构的结构示意图;
图4为本发明心肺复苏作业模块的结构示意图;
图5为图4中根部驱动模块、中部驱动模块、前部驱动模块的结构示意图;
图6为本发明带轮驱动机构的结构示意图;
图7为本发明机器人收缩状态的结构示意图;
图8为本发明机器人越障状态的结构示意图;
图9为本发明机器人平行状态心肺复苏作业的结构示意图;
图10为本发明机器人非平行状态心肺复苏作业的结构示意图;
其中:1为车体,2为摆臂机构,201为摆臂行星轮,202为摆臂板,203为摆臂滑块紧固件,204为上直线轴承杆,205为滑动轴,206为下直线轴承,207为凸轮滚子、208为滑轨固定板、209为凸轮,210为弹簧,211为锁紧螺母,3为摆臂驱动机构,301为摆臂电机,302为蜗杆,303为蜗轮,304为主动带轮,305为从动齿轮,306为摆臂输出轴,307为轴套,4为心肺复苏作业模块,401为心肺复苏仪,402为大摆臂,403为小摆臂,404为作业基座,405为抱爪电机,406为抱爪,407为根部驱动模块,408为中部驱动模块,409为前部驱动模块,410为直线电缸,417为关节电机,427为电机腔体,437为尾座,5为带轮驱动机构,501为驱动电机,502为驱动输出轴,503为主驱动轮,504为驱动履带,505为被动轮。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1所示,本发明包括车体1、摆臂机构2、摆臂驱动机构3、心肺复苏作业模块4及带轮驱动机构5,其中车体1行进方向的左右两侧均设有摆臂机构2,两侧的摆臂机构2对称设置在车体1中部的左右两侧,摆臂驱动机构3安装在车体1内部,该摆臂驱动机构3的输出端分别与两侧摆臂机构2相连,驱动两侧摆臂机构2同步转动;心肺复苏作业模块4的一端安装于车体1的顶部,另一端为心肺复苏按压执行端;车体1行进方向的左右两侧均设有带轮驱动机构5,两侧的带轮驱动机构5呈对称形式设置,实现机器人整体行进。机器人通过摆臂机构2的转动可以大幅度调节重心位置完成越障功能。
如图1~3所示,本实施例的摆臂机构2包括摆臂行星轮201、摆臂板202、凸轮机构、直线运动副及滑轨固定板208,滑轨固定板208与摆臂驱动机构3的输出端相连,摆臂行星轮201与摆臂板202的一端通过轴承和连接轴实现转动连接,摆臂板2的另一端通过直线运动副与滑轨固定板208连接,摆臂行星轮201与带轮驱动机构5中的驱动履带504相连,直线运动副在摆臂机构2转动过程中通过凸轮机构实现直线运动,进而压紧摆臂行星轮201,该摆臂行星轮201张紧驱动履带504。
本实施例的直线运动副包括摆臂滑块紧固件203、上直线轴承204、滑动轴205、下直线轴承206及弹簧210,本实施例的凸轮机构包括凸轮滚子207及凸轮209;摆臂板202的另一端与摆臂滑块紧固件203法兰连接,摆臂滑块紧固件203与上直线轴承204相固定,滑动轴205的一端固接于滑轨固定板208上,另一端由上直线轴承204及摆臂滑块紧固件203穿过,并连接锁紧螺母211,该滑动轴205上滑动连接有作为凸轮机构施力部件的下直线轴承206,即下直线轴承206固定在凸轮滚子207上,滑动轴205上套设有弹簧210,该弹簧210的两端分别与上直线轴承204及下直线轴承206连接。凸轮209通过轴套307固定在车体1的外表面上,本实施例的凸轮209呈横放的“8”字形,凸轮滚子207始终与凸轮209滚动连接。两侧的摆臂机构2中的滑轨固定板208与安装在车体1内的摆臂驱动机构3中的摆臂输出轴306的两端相连接,摆臂输出轴306的两端由车体1穿出后、再穿过轴套307,并与凸轮209转动连接;两侧的摆臂机构2通过摆臂驱动机构3同步转动。
如图1~3所示,本实施例的摆臂驱动机构3包括摆臂电机301、传动机构及摆臂输出轴306,该摆臂电机301安装于车体1内,摆臂输出轴306转动安装于车体1上,该摆臂输出轴306的两端分别由车体1穿出,并分别与两侧摆臂机构2中的滑轨固定板208相连,进而带动左右两侧的摆臂机构2同步转动;摆臂电机301的输出端通过联轴器、传动机构与摆臂输出轴306连接,驱动摆臂输出轴306转动,并带动两侧摆臂机构2同步转动。本实施例的传动机构包括蜗杆302、蜗轮303、主动带轮304、从动齿轮305及同步带,该蜗杆302转动安装于车体1内,并通过联轴器与摆臂电机301的输出端相连,蜗轮303的轮轴转动安装于车体1内,该蜗轮303与蜗杆302啮合传动、实现减速传动,蜗轮303的轮轴上连动有主动带轮304,即主动带轮304通过蜗轮303的轮轴与蜗轮303同步旋转,从动齿轮305与摆臂输出轴306通过法兰连接,并通过同步带与主动带轮304相连。摆臂输出轴306转动进而带动左右两侧的摆臂机构2同步转动。
如图1、图4及图5所示,本实施例的心肺复苏作业模块4包括心肺复苏仪401、大摆臂402、小摆臂403、作业基座404、抱爪电机405、抱爪406、根部驱动模块407、中部驱动模块408、前部驱动模块409及直线电缸410,该根部驱动模块407安装于车体1的顶部,根部驱动模块407的输出端驱动大摆臂402转动输出俯仰自由度,中部驱动模块408安装于大摆臂402上,该中部驱动模块408的输出端驱动小摆臂403转动输出俯仰自由度,前部驱动模块409安装于作业基座404内部,该前部驱动模块409的输出端与小摆臂403相连,前部驱动模块409通过驱动小摆臂403的反作用力驱动作业基座404转动输出俯仰自由度;作业基座404的两侧分别安装有抱爪电机405,每侧抱爪电机405的输出轴均连接有抱爪406;直线电缸410安装于作业基座404下表面的中部,位于两侧抱爪406之间,该直线电缸410的伸缩杆上安装有心肺复苏仪401。
本实施例的根部驱动模块407、中部驱动模块408及前部驱动模块409结构相同,均包括关节电机417、电机腔体427及尾座437,关节电机417安装在电机腔体427内部,该关节电机417的输出轴由电机腔体427的一侧伸出,尾座437与电机腔体427另一侧的尾部相连。大摆臂402及小摆臂403均为对称的两根。根部驱动模块407中的电机腔体427固定在车体1的顶部,位于左侧的大摆臂402的上端与中部驱动模块408中的电机腔体427的一侧固接,下端与根部驱动模块407中的关节电机417的输出轴连接,位于右侧的大摆臂402的上下两端分别与中部驱动模块408中的尾座437和根部驱动模块407中的尾座437通过轴承转动连接;位于左侧的小摆臂403的前端与前部驱动模块409中的关节电机417的输出轴连接,后端与中部驱动模块408中的关节电机417的输出轴连接,位于右侧的小摆臂403的前后两端分别与前部驱动模块409中的尾座437和中部驱动模块408中的尾座437通过轴承转动连接。通过根部驱动模块407、中部驱动模块408及前部驱动模块409的配合可以调节抱爪406的作业方向和角度。本实施例的抱爪406为弧形,两侧抱爪406通过各自的抱爪电机405驱动,将被困人员抱紧固定。
如图1、图2及图6所示,本实施例的带轮驱动机构5包括驱动电机501、驱动输出轴502、主驱动轮503、驱动履带504及被动轮505,该驱动电机501固定于车体1内部,输出端通过联轴器与转动安装于车体1上的驱动输出轴502的一端相连,驱动输出轴502的另一端连接有主驱动轮503,被动轮505转动安装于车体1上,该被动轮505、主驱动轮503及摆臂行星轮201通过驱动履带504实现传动连接。
本发明的心肺复苏仪401为市购产品,购置于河南迈松医用设备制造有限公司,型号为MSCPR—1A。
本发明的工作原理为:
摆臂驱动机构3驱动摆臂机构2的工作过程为:摆臂电机301转动带动蜗杆302转动,蜗杆302与蜗轮303配合实现减速传动,蜗轮303的转动带动主动带轮304旋转,通过同步带旋转带动从动齿轮305和摆臂输出轴306同步运动,摆臂输出轴306转动输出旋转运动驱动左右两侧摆臂机构2实现同步转动。摆臂机构2中,凸轮滚子207和凸轮209形成凸轮机构,上直线轴承204与下直线轴承206之间通过弹簧210连接,与滑动轴205形成直线运动副,摆臂机构2在转动过程中,凸轮滚子207在凸轮209表面滚动,通过下直线轴承206压缩弹簧210,弹簧210通过上直线轴承204、摆臂滑块紧固件203和摆臂板202压紧摆臂行星轮201,使得驱动履带504实时张紧。
心肺复苏作业模块4的工作过程为:根部驱动模块407中的关节电机417驱动大摆臂402转动输出俯仰自由度,中部驱动模块408中的关节电机417驱动小摆臂403转动输出俯仰自由度,前部驱动模块409中的关节电机417驱动作业基座404转动输出俯仰自由度,三个俯仰自由度组成的三自由度机械臂,可以调节机械臂前端心肺复苏仪401的位置角度;两个抱爪电机405分别驱动两个抱爪406实现对被困人员的抱紧固定,防止按压过程反作用力弹开心肺复苏仪401,保证按压质量,然后对准被困人员的心脏位置实现按压急救治疗。作业完毕后,三自由度机械臂折叠回收。
如图7~10所示,为本发明在废墟环境内运动时三种运动状态的结构示意图,具体工作过程为:
当机器人刚进入废墟洞口时,由于废墟洞口狭小,尺寸空间受限,摆臂驱动机构3驱动摆臂机构2运动,使机器人两侧的摆臂机构2转动到与车体1平行的位置,同时心肺复苏作业模块4中的根部驱动模块407、中部驱动模块408和前部驱动模块409驱动三自由度机械臂折叠回收,使得机器人转换为如图7所示的收缩状态,缩小机器人体积,进入废墟。
当机器人遇到台阶或者较高障碍物时,摆臂驱动机构3驱动摆臂机构2动作,使机器人两侧的摆臂机构2从水平位置抬起转到机器人的后方,摆臂机构2与水平位置的夹角和越障的高度成正比例关系,然后带轮驱动机构5动作,一侧正转另一侧反转,使得机器人整体旋转180°,车尾变成车头,使机器人转换为如图8所示的越障状态,翻过障碍物。
当被困伤员处于水平地面时,机器人的车体1与被困伤员处于同一平面,机器人运动到被困伤员附近,摆臂驱动机构3驱动摆臂机构2动作,使机器人两侧的摆臂机构2转动到机器人的尾部与车体1平行的位置,同时心肺复苏作业模块4中的根部驱动模块407、中部驱动模块408和前部驱动模块409驱动三自由度机械臂伸出,使得机械臂前端心肺复苏仪401运动到被困伤员心脏位置,机器人转换为如图9所示的平行状态心肺复苏作业模式,对准被困伤员心脏实施按压急救治疗。
当被困伤员处于非水平地面时,机器人运动到被困伤员附近,摆臂驱动机构3驱动摆臂机构2动作,使机器人两侧的摆臂机构2转动到机器人车体1的下方,完成机器人车体1角度的倾斜,使得机器人的车体1与被困伤员平行,然后心肺复苏作业模块4中的根部驱动模块407、中部驱动模块408和前部驱动模块409驱动三自由度机械臂伸出,使得机械臂前端心肺复苏仪401运动到被困伤员心脏位置,机器人转换为如图10所示的非平行状态心肺复苏作业模式,对准被困伤员心脏实施按压急救治疗。
本发明具有模块化体积小、运动灵活、适应性广泛、操控精准、结构紧凑等优点,代替人工进入危险环境可以对被困于坍塌废墟换环境内的伤员实施心肺复苏治疗。
- 一种心肺复苏机器人
- 心肺复苏机器人及其交互方法