用于隔离器的流体输送系统
文献发布时间:2023-06-19 13:26:15
相关申请
本申请要求日期为2019年8月26日的美国临时申请62/891,493的优先权,该申请被通过引用全部并入。
技术领域
本公开涉及隔离器。更具体地,本公开的实施例涉及促进在隔离器内使用机器人技术的装置。
背景技术
手套箱是一种允许处理物品的密封容器。通常,手套箱用于防止内部物体受到污染或防止试剂(即,危险物质)接触操作员。通常,手套被嵌置在手套箱中并被放置成,使得用户的手可被插入到手套中以便在不破坏密闭度(containment)的情况下在该箱内执行任务。大多数的手套箱都具有透明的防护罩,其允许用户看到正在处理的物品。这些结构允许手动处理物品。
同样,作为手套箱的一个子集的隔离器可以在密封环境内轻松操作并查看在制品。隔离器用在生物处理操作中以提供非常干净或无菌的环境,以防止细菌、病毒、病菌、病原体等造成的污染。通常,隔离器用在最终装填操作中,其中产品(例如细胞、病毒产品、灭活病毒和其他生物产品)处于溶液中并被输送到例如小瓶中以用于储存或运输。通常,输送端口用于将材料移动到隔离器中。一旦已将材料(塞子、小瓶、液体等)放置在隔离器内,就需要对其进行处理和操作。隔离器还具有手套端口,其允许人们伸入到隔离器中,而无需进入和污染该隔离器或其中容纳的产品或材料。然而,在隔离器内手动操作材料和产品是非常耗时的。
隔离器可包括α端口和β端口。可以将α端口视为隔离器中的一个孔。β端口可被认为是与α端口通信或可释放地锁定的门。β端口可被附接并铰接到α端口。在一些实施例中,β端口可以不与α端口铰接。该β端口可包括塑料材料或金属材料,用于清洁和重复使用或作为一次性物品。β端口通常与手套端口相邻,使得可将材料放入到α端口中或从该α端口移除,该α端口是隔离器的内部容积的入口,在该内部容积中进行生物处理(例如装填和成品操作)。
在隔离器内进行处理越来越多地由机器人执行。隔离器制造商现在正在设计没有手套端口的隔离器,以避免人为操作,从而进一步降低污染的可能性。然而,所处理的材料可能是柔性的,例如管,从而使得难以由机器人进行处理。此外,一些材料(例如针、探针、插管等)可能容易损坏其他材料(例如在其中处理生物产品的生物反应器袋(其通常由一个或多个塑料膜(例如聚乙烯、聚丙烯、聚乙烯醋酸乙烯酯(EVA)、聚对苯二甲酸乙二醇酯(PET)、聚酰胺(尼龙)等)制成)),从而也使得由机器人进行处理变得困难。生物反应器袋的破裂导致袋或生物反应器的内部容积内的泄漏和无菌性丧失。
因此,允许机器人安全且有效地处理隔离器内的柔性且难以操纵的材料的装置代表了本领域的进步。
发明内容
一种用于与隔离器一起使用的设备,其包括用于与隔离器的β端口可释放地连结的冠部,其中,该冠部包括至少一个锚固支撑件;位于至少一个锚固支撑件的至少一端上的弹簧钩;针块,其包括至少一个通孔,用于在其中定位针,其中,至少一个针与管连结;轭;偏置元件,其与轭和至少一个锚固支撑件可释放地连结;其中,针块被可释放地连结到冠部。
本公开的实施例包括便于使用机械臂将液体输送针组从袋移动到隔离器中的装置和方法。它还有助于允许机械臂将针和管放回到袋中,以便在操作(例如,小瓶装填操作)完成时移除。
这些和其他设置将从下面的描述、权利要求书和附图而变得清楚。本公开的多种益处、方面、新颖性和创造性特征以及其示例性实施例的细节将通过以下描述和附图而得到更充分的理解。因此,可以通过参考附图来详细理解本文公开的特征的方式、以上简要概括的本公开的实施例的更为具体的描述。然而,将会注意的是,附图仅示出了本公开的典型实施例,并且因此不应被视为对其范围的限制,因为所描述的实施例可以允许用于在袋、生物反应器和/或隔离器中使用的其他同样有效的流体输送系统。还将会理解的是,一个实施例的元件和特征可以在其他实施例中找到,而无需进一步叙述,并且在可能的情况下,相同的附图标记已被用于指示与附图共有的可比较的元件。如本文中所使用的那样,单数形式“一个”、“一种”和“该”包括复数指代,除非上下文另有明确规定。除非另有限定,本文所使用的所有技术和科学术语具有与这些实施例所属领域的技术人员通常理解的相同的含义。此外,除非上下文另有说明,否则本文中所使用的以下术语受到以下定义的约束。
附图说明
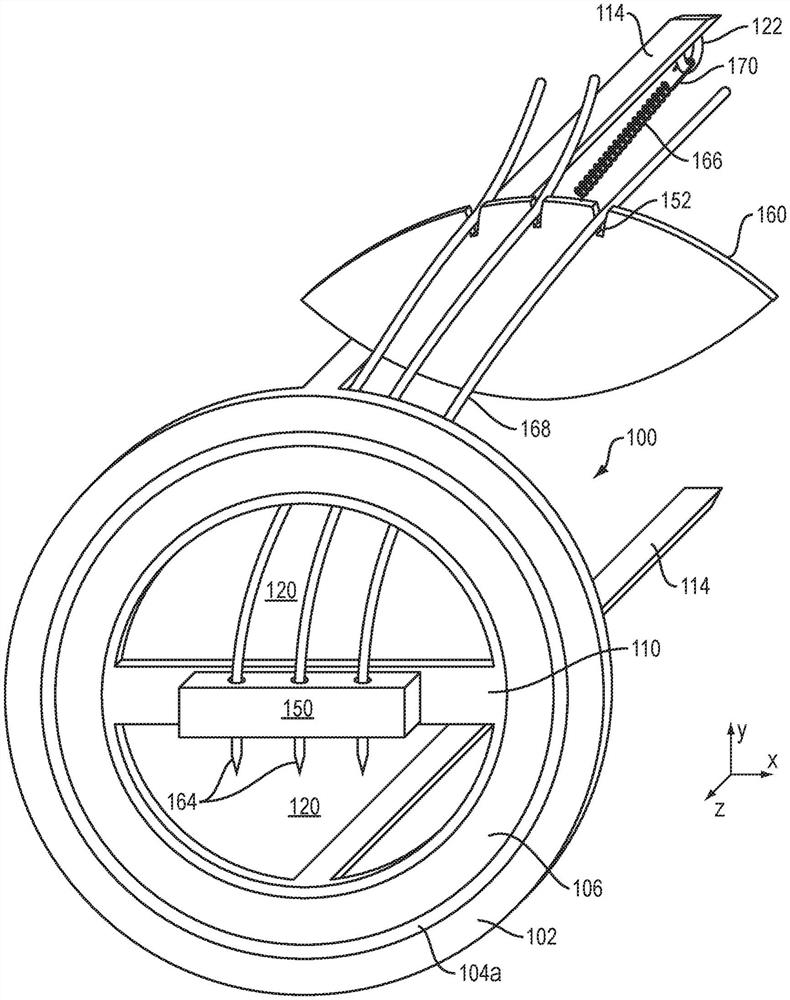
图1描绘了根据本公开的冠部和针块的正视图;
图2描绘了根据本公开的实施例的β端口的侧向透视图;
图3描绘了根据本公开的实施例的具有至少一个锚固支撑件和弹簧钩的冠部的至少两个实施例;
图4描绘了根据本公开的实施例的轭和针块以及针和管;
图5描绘了根据本公开的实施例的针块,该针块具有附接到管并连结到冠部的针;
图6描绘了根据本公开的实施例的用于将流动路径输送到隔离器和/或从隔离器输送流动路径的消毒方法;和
图7描绘了根据本公开的实施例的用于将流动路径输送到隔离器和/或从隔离器输送流动路径的第二消毒方法。
具体实施方式
本公开描述了一种产品和方法,其有助于使用机械臂将柔性的难以处理的装置(例如,液体输送针组)从袋移动到隔离器中。它还有助于允许机械臂将针和管放回到β袋中,以便在操作完成时移除(例如,小瓶装填操作)。
当前的机器人是相对灵巧的并且可以从袋中取出设备(例如,装填针),而不会造成可制造性问题。该设备需要被基本定向并始终定位在该袋内,以便使机器人能够抓取该设备。然而,将针放回到袋中通常会出现问题。在生物操作中,针被附接到硅胶管的端部,通过该硅胶管来泵送液体。管没有刚性;它们是非常灵活的。它们也可能是一面带粘胶的。一旦将管与针一起拉入到隔离器中,就很难将它们推动、返回或以其他方式输送到隔离器。该操作可被描述为类似于推动一根粘性的绳子。如果隔离器具有手套端口,则这不是问题,其中一个人使用手套抓取管并将它们放回到袋中。然而,机器人将管推入到袋中要困难得多。并且,如果管并未被正确地返回到袋,则管会妨碍该端口门的关闭。
在此描述的至少一种方法包括将针间隔开设定距离设置到刚性块中。该刚性块还为机器人提供了一个易于抓取和安全操作的特征。冠部可被放置在端口(也被称为β端口)的内径内。该冠部包括用于偏置元件的锚固点。在一些实施例中,偏置元件是拉伸弹簧。在一些实施例中,该偏置元件是螺旋管。弹簧的一端或管的一端被可释放地附接到轭上。轭牢固地保持住管子或管。然而,当机器人将针拉入到隔离器中时,轭并不阻止管与针一起移动。当针、管和轭被机器人向前拉动时,拉伸弹簧(或螺旋管)就伸展。因为管是灵活的,因此机器人可以使针上下移动(就像在装填操作中所做的那样)或左右移动。
在发生在隔离器内的生物处理操作(例如用生物产品装填小瓶)之后,机器人可以将针块推回到袋中以移除。由于被附接到轭上的拉伸弹簧或螺旋管处于张力作用下,因此将管拉入到袋中,使得它们不会妨碍端口门的关闭。
图1描绘了根据本公开的冠部100和针块150的正视图。冠部100包括前表面102。前表面102将该设备轴向定位在β端口内,可选择地与β端口上的止动件配合(下文进一步讨论),使得β端口的门不会被推动到β端口中过远。可选择的密封区域104(如被示出为具有可选择的垫圈104a)是相对于前表面102凹陷的。中间表面106是相对于密封区域104凹陷的。后表面106与中间表面104共面或是相对于中间表面104凹陷的。后表面106还包括具有两个或更多个紧固件孔112的中间支撑件110。冠部100可选择地包括一个或多个锚固支撑件114,其从冠部100的后表面116延伸。在一些实施例中,冠部100形成与中间支撑件110相邻的两个半月形通道120(或近似呈半月形)。实际上,中间支撑件110无需形成尺寸或形状相当的通道120。
冠部100可由金属、陶瓷或聚合物或任何其他适用的材料制成。一些聚合物包括但不限于各种聚烯烃,例如聚乙烯(例如,低密度聚乙烯、线性低密度聚乙烯、中密度聚乙烯、高密度聚乙烯、超高密度聚乙烯等)。冠部100还可由聚缩醛、尼龙6、尼龙66、聚丙烯、丙烯腈-丁二烯-苯乙烯或其他聚合物和/或它们的混合物制成。前述聚合物材料中的任一种可包括填料和/或增强材料,例如玻璃纤维、碳纤维、尼龙纤维、木纤维、芳族聚酰胺纤维等。在一些实施例中,冠部100包括聚合物或共聚物,其是伽马稳定的,使得冠部100可被利用伽马射线进行消毒。冠部100可被以其他方式进行消毒,例如用化学品(例如环氧乙烷、醇、臭氧处理等)进行处理、蒸汽处理和本领域技术人员已知的其他消毒处理。
图1还描绘了针块150,其包括前侧152和横向侧154。针块150在顶面156上包括一个或多个通孔158。针块150还包括后侧160,其包括两个或多个紧固件(未示出)。紧固件对应于冠部100中的紧固件孔112以将针块150可释放地锚固到冠部100。通过沿方向D1推动针块150而使紧固件与紧固件孔112配合,针块150可被可释放地粘附到冠部100。针块150可以包括用于冠部100的任何材料,如上所述。
图2描绘了根据本公开的实施例的β端口130的侧向透视图。β端口130大致呈圆筒形并且可选择地在前侧132上包括凸缘140。β端口130可被放置在隔离器(未示出)的α端口(未示出)中,如本领域技术人员所已知的那样。凸缘140还可与α端口的门(未示出)结合使用。β端口130还包括位于β端口130的外表面142上的袋附接区域128。β端口130还包括位于内表面134上的附接区域126,用于可释放地附接冠部100。附接区域126可包括本领域技术人员已知的任何附接机构。例如,附接区域126可以是冠部100a、100b和β端口130两者上的用于卡扣配合的孔(如下所述)或配合梁和扣件。一些实施例包括凸台、凸片、弹簧加载的附接件、球柱塞(例如
图3描绘了根据本公开的实施例的具有至少一个锚固支撑件114和弹簧钩122的冠部100a、100b的至少两个实施例。图3描绘了冠部100a、锚固支撑件114和弹簧钩122。如所示,锚固支撑件114横过表面125的相对两侧。另外,如所示,弹簧钩122被设置在锚固支撑件114的中心附近,但实际上,不要求弹簧钩122位于锚固支撑件114的中心或其附近。同样以虚线示出了具有三个紧固件孔112的中间支撑件110。
图3进一步描绘了具有三个锚固支撑件114的冠部100b。锚固支撑件114中的至少一个还包括弹簧钩122。将会理解的是,具有一个弹簧钩122的一个锚固支撑件114足以用于操作。尽管如此,本文设想到了不止一个锚固支撑件114,每个锚固支撑件114均具有弹簧钩122。此外,如所示,冠部100b包括安装特征124。例如,安装特征可以包括梁和扣件,用于与配合部件上的相应孔(此处为β端口130)形成卡扣配合。当冠部100b与β端口130配合时,通过沿方向D2将冠部100b和β端口130推动在一起,冠部100b行进到β端口130中,其中卡口式安装特征124与附接区域126配合。当冠部100a、100b与冠部130配合时,它被定位成限制轴向和旋转运动。
图4描绘了根据本公开的实施例的轭160和针块150以及针164和管168。轭160包括槽口152。三个槽口152被描绘出来,尽管可在轭160中可以结合有从一个到在商业上为任何特定操作所需要的任何数量。槽口152可以可选择地包括拔模角度以提供过盈配合或适应于具有不同厚度的管168。
如所示,管168被插入到槽口152中。管168可以是展开的或像管168a那样被盘绕住。如本领域技术人员所已知的那样,当轭160在装填和成品操作中操作时,螺旋管168a可以提供张紧或偏置。管168可以是用于生物处理的任何适用的管,例如硅管、乙烯基管、含氟聚合物、聚酰胺、聚氨酯、聚烯烃(例如聚乙烯和聚丙烯)等。将会理解的是,螺旋管可用作其自身的弹簧并且可与弹簧结合使用或代替弹簧使用。此外,如果管是盘绕的,则可以从该设备中省略掉轭160。
在管168的远端172处是针164。针164可以在顶面156上的通孔158处放置在针块150中。如下文将更为完整地描述的那样,针块150可以由机器人操纵以在隔离器内执行装填和成品操作,例如用生物流体装填小瓶或其他容器以进行处理和存储。轭160具有与其相关联的偏置元件。该偏置元件是张紧器。换句话说,可以将张紧器放置成处于拉力下,使得该轭在未处于拉力作用下时缩回到不同位置。例如,至少一个偏置元件是弹簧166,其在一端具有钩170,用于与上述弹簧钩元件122相连,而弹簧166的第二端与轭160相连。第二偏置元件包括本身盘绕的管168a,该管是偏置元件。可以使用其他偏置元件,例如,弹性带、壳体内的可伸缩绳或在移除张力时收缩的其他柔顺构件。任何一个或多个偏置元件可与轭160一起使用。在一些实施例中,同时使用螺旋管168a和弹簧166。
图5描绘了针块150,其具有附接到管168并连结到冠部100的针164。如所示,管168定位在槽口152内的轭160处于缩回位置中,即,弹簧166被附接到弹簧钩元件122,处于略微张紧到没有张紧力的状态中。尽管未示出,但机器人能够抓取针块150并将针块150和针164输送到装填和成品站并沿+z方向拉动该针块150。在该状态下,轭160也被拉过通道120中的任一个,使得轭160位于冠部100的前表面102的前方。沿+z方向拉动针块150将偏置元件(如图5中所示的弹簧166)放置成处于拉力作用下。当该装填和成品操作完成时,机器人可以返回针块150以与冠部100重新连结。由于轭160容置管168,因此管168被自动地缩回到位于冠部100后面的位置。将会理解的是,未示出的延伸管可被可释放地连结在β端口130与冠部100之间。
图6描绘了根据本公开的实施例的用于将流动路径输送到隔离器和/或从隔离器输送流动路径的消毒方法600。在一些实施例中,该流动路径可以是一次性的流动路径。在一些实施例中,隔离器不包括手套端口。在一些实施例中,隔离器包括用于执行操作的机器人。消毒方法600始于步骤601。在步骤603处,可选择地,将小瓶和/或容器和/或液体放置到隔离器中。例如,该隔离器为例如上述无手套端口的隔离器。此外,可选择地,在步骤603处执行生物处理操作,例如,培养步骤、纯化步骤、细胞收获步骤、精制步骤、超滤步骤和本领域技术人员已知的其他生物处理操作。
在步骤607和步骤609处,可选择地,将其中可选择地具有针和管的袋(例如β袋)放置到隔离器中。在一些实施例中,如上所述,针被定位在针块内。此外,在一些实施例中,管被定位在轭内,如上所述。在步骤610处,机器人抓取其中定位有针的针块并将针块输送到隔离器中以进行生物处理操作,其中,如上所述,将针块连结到冠部,并且其中,与管连结的轭被经由偏置元件连接到冠部上的支撑件,如上所述。偏置元件可以是例如弹簧、螺旋管、可伸缩线绳机构等。
在步骤612处,进行生物处理操作。例如,生物处理操作可以是装填和成品操作,其中,流体流过管,流出针并流入到容器或小瓶中。当生物处理操作完成时,针块、针和管被返回到袋中。所设想到的是,机器人将针块、针和管推入到袋中。在步骤616处,可选择地,询问是否执行第二生物处理操作。如果答案为是,则方法600返回到步骤610。如果答案为否,则方法600在步骤617处停止。
图7描绘了根据本公开的实施例的用于将流动路径输送到隔离器和/或从隔离器输送流动路径的第二消毒方法700。在一些实施例中,流动路径可以是一次性的流动路径。在一些实施例中,隔离器不包括手套端口。在一些实施例中,隔离器包括用于执行操作的机器人。方法700始于步骤701。在步骤702处,小瓶和/或容器被输送到隔离器中。方法700然后行进到步骤704,在那里,β袋(例如一次性液体输送β袋)被附接到隔离器的α端口,如本文所述。在步骤706处,机器人打开隔离器的α/β门。在步骤708处,机器人然后抓取并取回其中放置有针的针块,并且将针块定位成,使得针能够装填小瓶/容器。在步骤710处,流体(例如生物流体)被输送通过流动路径,例如一次性的流动路径,例如针/管,从而将流体分配到小瓶/容器中。在一些实施例中,流体被泵送通过该流动路径。在一些实施例中,该泵是蠕动泵。
当对于任何给定操作完成流体输送时,机器人在步骤712处使针块返回到袋中。在一些实施例中,如上所述,针块被重新定位到冠部上。此外,由于针/管处于张力的作用下,如上所述,因此针/管被自动地拉动或以其他方式返回到袋中。在步骤714处,机器人关闭门。在步骤716处,可选择地,从隔离器的外部接近β门。方法700然后停止。
本文所述的所有范围包括它们之间的范围并且可以包括或不包括端点。可选择的所包括的范围是它们之间的整数值(或包括一个原始端点),处于所述数量级或下一个较小的数量级。例如,如果下限值为0.2,则可选择的所包括的端点可以是0.3、0.4、...1.1、1.2等以及1、2、3等;如果上限值为8,则可选择的所包括的端点可以是7、6等以及7.9、7.8等。一侧边界(例如3或更大)同样包括以处于所述数量级或更低的一个数量级的整数值开始的一致边界(或范围)。例如,3或更大包括4或3.1或更大。
在整个专利说明书中对“某些实施例”、“一个或多个实施例”、“一些实施例”或“一个实施例”的引用表示结合该实施例描述的特征、结构、材料或特性被包括在本公开的至少一个实施例中。因此,本专利说明书中出现的诸如“在一个或多个实施例中”、“在某些实施例中”、“一些实施例”或“在一个实施例中”之类的短语并不一定指代同一实施例。
在本专利说明书中所述的专利和申请的公开文献被通过引用整体并入,就好像每个单独的引用或其部分都被具体且单独地通过引用结合到本文中作为充分阐述。本申请要求优先权的任何专利申请也被通过引用整体并入。
- 用于隔离器的流体输送系统
- 组合物、连接件、改善用于输送流体的两个或更多个装置之间的粘接的方法和用于输送流体的系统