工业阀门执行体故障智能监控装置
文献发布时间:2023-06-29 06:30:04
技术领域
本发明为工业数据采集以及监控领域,具体涉及一种工业阀门执行体故障智能监控装置。
背景技术
工业阀门是工业管路上控制介质流动的一种重要附件,可用于控制空气、水、蒸汽、各种腐蚀性介质、泥浆、油品、液态金属和放射性介质等各种类型流体的流动。阀门由阀体、阀杆启闭机构、阀盖三大部分组成,具有切断或沟通管内流体的流动,调节管内流量、流速,使流体通过阀门后产生很大的压力降,维持一定压力等作用。电动阀门执行机构具有外观设计美观大方,体积小、重量轻、操作简单且具有高强耐磨、部件质量可靠、电机性能高、非侵入式红外遥控设定、换向延时保护、数字限位(电子限位)、异常保护、耐高温、可频繁动作及免维护特点,在实际运用中广受青睐。电动阀门执行机构的运行状态直接影响到了整个电动阀门的工作性能,因此对电动阀门执行机构的故障诊断具有重要意义。传统的电动阀门执行机构故障诊断机理,是以检修工人以一定周期地去巡检与查验。随着工业技术的不断发展,经常拆卸阀门执行机构的诊断方法已经远不能适应要求,并且增加了维修成本和检修周期。而且,传统的常规手段在阀门故障初期难以通过直接监测,而检测出早期的故障信号对提升整个系统的可靠性才有意义。因此获得一种工业阀门执行故障只能监控装置十分重要。
发明内容
为解决上述至少一种技术问题,本发明提供一种工业阀门执行体故障智能监控装置,包括工业阀门执行体外壳,所述工业阀门执行体外壳内开设执行腔室,所述执行腔室内壁上开设有第一环形齿,还包括第一连接件,所述第一连接件的第一端与工业阀门执行体外壳旋转连接,第一连接件的第二端旋转连接有第一齿轮,所述第一齿轮与第一环形齿啮合,所述第一齿轮上固定有第二连接件,所述第二连接件周侧固定有与第二连接件垂直的第三连接件,所述第三连接件上旋转连接有执行件,所述执行件固定连接工业阀门的阀杆,所述工业阀门执行体外壳上固定有执行横杆,所述执行横杆上开设执行轨道,所述执行件第一连接件控制下在执行轨道范围内做往复运动;位于所述执行轨道两端均配置有第一弹簧探针;
通过上述技术方案,第一连接件的旋转能够带动第一齿轮在第一环形齿内进行旋转,位于第一齿轮上的第二连接件能够同时转动,进而能够实现执行件在执行轨道上做往复运动,以驱动阀门的阀杆做往复运动。
还包括控制器,所述第一弹簧探针两端分别接入控制器的输入端,所述第一驱动电机连接控制器的输出端。
通过上述技术方案,控制器能够接收第一弹簧探针传输来的数据,进而实现数据处理,即判断多次接收到的第一弹簧探针的信号是否相同,相同则说明执行件稳定运动,若不同,要么就是第一弹簧探针损坏,或者执行件没有按照既定方式运动。
作为上述一种优选方式,所述第一弹簧探针包括第一移动腔、与第一移动腔连通的第二移动腔,所述第一移动腔和第二移动腔之间固定有第一限位环,所述第一移动腔内设有第一接触件,所述第一接触件和第一移动腔内壁之间固定有第一弹簧,所述第一弹簧连接导线输出,所述第二移动腔内设有第二接触件,所述第二接触件端部一体成型有第二限位环,所述第二限位环和第一限位环之间的第二接触件外套设有第二弹簧,所述第二接触件在第二弹簧作用下不与第一接触件接触,所述第二接触件连接导线输入,所述导线输入和导线输出分别连接控制器的输出端和输入端。第二接触件部分位于执行轨道内。
通过上述技术方案,第二弹簧的设置能够起到第二接触件的复位以及移动,第一弹簧的设置能够起到缓冲作用,防止硬接触,当执行件位于执行轨道两端的时候,会将第二接触件向内推进,第二接触件会接触第一接触件,或同时将第一接触件也向内推进,此时二者导通,导通信息将传输至控制器。
作为上述一种优选方式,所述第一接触件上开设有第一斜面,所述第二接触件上开设有与第一斜面配合的第二斜面。
通过上述技术方案,第一斜面和第二斜面的设置,能够增加二者的接触面积,增加接触的稳定性。
作为上述一种优选方式,还包括第一驱动电机,所述第一驱动电机的输出轴穿过工业阀门执行体外壳后固定连接第一连接件的第一端。
本发明为了减轻摩擦力,采用如下方式,其一:所述执行件上一体成型有第三限位环,所述执行轨道周侧的执行横杆上一体成型有凸起环,所述凸起环位于第三限位环的宽度范围内。
通过上述技术方案,凸起环的设置,能够将原本滑动面接触,变成了滑动线接触,能够减少摩擦力。
其二:所述执行件上一体成型有第四限位环,所述第四限位环底部开设有滚珠槽,所述滚珠槽内置有滚珠,所述滚珠部分位于滚珠槽外,以配合执行横杆上表面。
通过上述技术方案,滚珠的设置,能够在原本滑动面接触,变成了滚动接触,能够减少摩擦力。
作为上述一种优选方式,所述工业阀门执行器外壳上固定有红外发射器和与之配合的红外接收器,所述红外发射器和红外接收器所在的直线为执行导轨的垂直中线。
通过上述技术方案,本发明又配合了红外发射器和红外接收器,若执行件正常工作,则在两次工作时红外发射器和红外接收器接收不到信号的时间间隔是一致的,会输送至控制器,可以配合第一弹簧探针判断的位置来进行判断,以排出由于弹簧探针自身原因导致数据不准确。
作为上述一种优选方式,所述红外发射器和红外接收器在执行件的高度范围内。
与现有技术相比,本发明的优点在于:本发明系统结构简单,本发明采用第一驱动电机控制第一连接件旋转,同时控制执行件做往复运动,能够实现在电机不停转的情况下控制工业阀门的阀芯作出往复运动,进而控制阀门工作,且同时配备两种监控装置,能够增加容错率,可提高监控的准确率。
附图说明
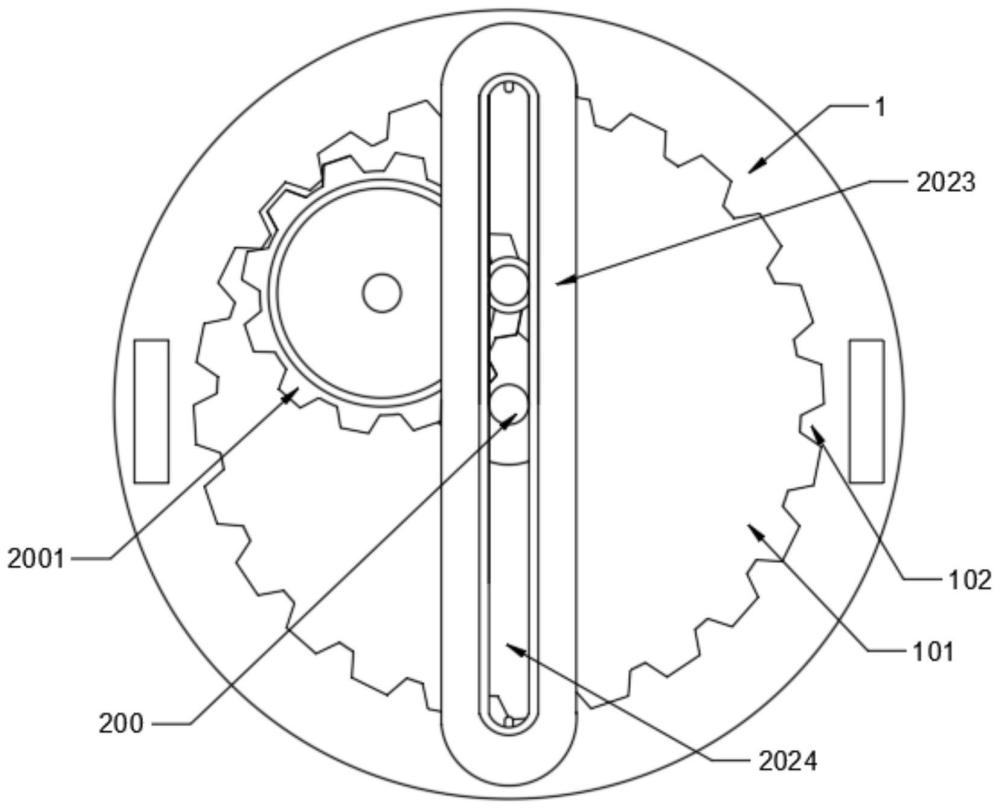
图1为本发明监控装置俯视图;
图2为本发明监控结构截面示意图一;
图3为本发明监控结构截面示意图二;
图4为本发明第一弹簧探针截面示意图;
图5为本发明控制结构框图;
附图标记:1-工业阀门执行体外壳;101-执行腔室;102-第一环形齿;
200-第一连接件;2001-第一齿轮;201-第二连接件;2011-第三连接件;202-执行件;
2023-执行横杆;2024-执行轨道;
206-第一弹簧探针;207-第一移动腔;208-第二移动腔;209-第一限位环;210-第一接触件;211-第一弹簧;212-第二接触件;213-第二限位环;214-第二弹簧;215-第一斜面;216-第二斜面;
301-控制器;
401-第三限位环;402-凸起环;403-第四限位环;404-滚珠;
501-红外发射器;502-红外接收器。
具体实施方式
为了使本领域技术人员更好地理解本发明,从而对本发明要求保护的范围作出更清楚地限定,下面就本发明的某些具体实施例对本发明进行详细描述。需要说明的是,以下仅是本发明构思的某些具体实施方式仅是本发明的一部分实施例,其中对于相关结构的具体的直接的描述仅是为方便理解本发明,各具体特征并不当然、直接地限定本发明的实施范围。
参阅附图所示,本发明采用以下技术方案,一种工业阀门执行体故障智能监控装置,包括工业阀门执行体外壳1,所述工业阀门执行体外壳1内开设执行腔室101,所述执行腔室101内壁上开设有第一环形齿102,还包括第一连接件200,所述第一连接件200的第一端与工业阀门执行体外壳1旋转连接,第一连接件200的第二端旋转连接有第一齿轮2001,所述第一齿轮2001与第一环形齿102啮合,所述第一齿轮2001上固定有第二连接件201,所述第二连接件201周侧固定有与第二连接件201垂直的第三连接件2011,所述第三连接件2011上旋转连接有执行件202,所述执行件202固定连接工业阀门的阀杆,所述工业阀门执行体外壳1上固定有执行横杆2023,所述执行横杆2023上开设执行轨道2024,所述执行件202第一连接件200控制下在执行轨道2024范围内做往复运动;位于所述执行轨道2024两端均配置有第一弹簧211探针206;
通过上述技术方案,第一连接件200的旋转能够带动第一齿轮2001在第一环形齿102内进行旋转,位于第一齿轮2001上的第二连接件201能够同时转动,进而能够实现执行件202在执行轨道2024上做往复运动,以驱动阀门的阀杆做往复运动。
还包括控制器301,所述第一弹簧211探针206两端分别接入控制器301的输入端,所述第一驱动电机连接控制器301的输出端。
通过上述技术方案,控制器301能够接收第一弹簧211探针206传输来的数据,进而实现数据处理,即判断多次接收到的第一弹簧211探针206的信号是否相同,相同则说明执行件202稳定运动,若不同,要么就是第一弹簧211探针206损坏,或者执行件202没有按照既定方式运动。
作为上述一种优选方式,所述第一弹簧211探针206包括第一移动腔207、与第一移动腔207连通的第二移动腔208,所述第一移动腔207和第二移动腔208之间固定有第一限位环209,所述第一移动腔207内设有第一接触件210,所述第一接触件210和第一移动腔207内壁之间固定有第一弹簧211,所述第一弹簧211连接导线输出,所述第二移动腔208内设有第二接触件212,所述第二接触件212端部一体成型有第二限位环213,所述第二限位环213和第一限位环209之间的第二接触件212外套设有第二弹簧214,所述第二接触件212在第二弹簧214作用下不与第一接触件210接触,所述第二接触件212连接导线输入,所述导线输入和导线输出分别连接控制器301的输出端和输入端。第二接触件212部分位于执行轨道2024内。
通过上述技术方案,第二弹簧214的设置能够起到第二接触件212的复位以及移动,第一弹簧211的设置能够起到缓冲作用,防止硬接触,当执行件202位于执行轨道2024两端的时候,会将第二接触件212向内推进,第二接触件212会接触第一接触件210,或同时将第一接触件210也向内推进,此时二者导通,导通信息将传输至控制器301。
作为上述一种优选方式,所述第一接触件210上开设有第一斜面215,所述第二接触件212上开设有与第一斜面215配合的第二斜面216。
通过上述技术方案,第一斜面215和第二斜面216的设置,能够增加二者的接触面积,增加接触的稳定性。
作为上述一种优选方式,还包括第一驱动电机,所述第一驱动电机的输出轴穿过工业阀门执行体外壳1后固定连接第一连接件200的第一端。
本发明为了减轻摩擦力,采用如下方式,其一:所述执行件202上一体成型有第三限位环401,所述执行轨道2024周侧的执行横杆2023上一体成型有凸起环402,所述凸起环402位于第三限位环401的宽度范围内。
通过上述技术方案,凸起环402的设置,能够将原本滑动面接触,变成了滑动线接触,能够减少摩擦力。
其二:所述执行件202上一体成型有第四限位环403,所述第四限位环403底部开设有滚珠槽,所述滚珠槽内置有滚珠404,所述滚珠404部分位于滚珠槽外,以配合执行横杆2023上表面。
通过上述技术方案,滚珠404的设置,能够在原本滑动面接触,变成了滚动接触,能够减少摩擦力。
作为上述一种优选方式,所述工业阀门执行器外壳上固定有红外发射器501和与之配合的红外接收器502,所述红外发射器501和红外接收器502所在的直线为执行导轨的垂直中线。
通过上述技术方案,本发明又配合了红外发射器501和红外接收器502,若执行件202正常工作,则在两次工作时红外发射器501和红外接收器502接收不到信号的时间间隔是一致的,会输送至控制器301,可以配合第一弹簧211探针206判断的位置来进行判断,以排出由于弹簧探针自身原因导致数据不准确。
作为上述一种优选方式,所述红外发射器501和红外接收器502在执行件202的高度范围内。
与现有技术相比,本发明的优点在于:本发明系统结构简单,本发明采用第一驱动电机控制第一连接件200旋转,同时控制执行件202做往复运动,能够实现在电机不停转的情况下控制工业阀门的阀芯作出往复运动,进而控制阀门工作,且同时配备两种监控装置,能够增加容错率,可提高监控的准确率。
术语“包括”或者任何其它类似用语旨在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者设备/装置不仅包括那些要素,而且还包括没有明确列出的其它要素,或者还包括这些过程、物品或者设备/装置所固有的要素。
在本发明的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。