一种垃圾收集和分类的深海ROV装置及其使用方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明涉及深海ROV技术领域,尤其涉及一种垃圾收集和分类的深海ROV装置及其使用方法。
背景技术
ROV,即遥控无人潜水器(Remote Operated Vehicle ), 无人水下航行器(Unmanned Underwater Vehicle,UUV)的一种,系统组成一般包括:动力推进器、遥控电子通讯装置、黑白或彩色摄像头、摄像俯仰云台、用户外围传感器接口、实时在线显示单元、导航定位装置、自动舵手导航单元、辅助照明灯和凯夫拉零浮力拖缆等单元部件。功能多种多样,不同类型的ROV用于执行不同的任务,被广泛应用于军队、海岸警卫、海事、海关、核电、水利 、水电、海洋石油、渔业、海上救助、管线探测和海洋科学研究等各个领域,在进行深海垃圾收集和分类时就需要用到ROV。
现有的垃圾收集和分类的深海ROV在使用过程中,随着收集到的垃圾数量的增加,ROV本体加上垃圾的重量处于逐步增加的状态,当重量达到一个临界值后,ROV的前进存在有相当大的阻力,这就导致现有的深海ROV在垃圾收集方面存在较大的限制,单次能收集存储的垃圾量较小,导致深海ROV需要反复深潜和上升,造成深海垃圾收集效率的降低和成本的增加。
发明内容
本发明公开一种垃圾收集和分类的深海ROV装置,旨在解决现有的垃圾收集和分类的深海ROV在使用过程中,随着收集到的垃圾数量的增加,ROV本体加上垃圾的重量处于逐步增加的状态,当重量达到一个临界值后,ROV的前进存在有相当大的阻力,这就导致现有的深海ROV在垃圾收集方面存在较大的限制,单次能收集存储的垃圾量较小,导致深海ROV需要反复深潜和上升,造成深海垃圾收集效率的降低和成本的增加的技术问题。
为了实现上述目的,本发明采用了如下技术方案:
一种垃圾收集和分类的深海ROV装置,包括ROV机体,所述ROV机体的外侧设有悬浮调节组件,且悬浮调节组件包括悬浮气囊和两个连接杆,两个连接杆均固定连接于ROV机体的外侧,两个所述连接杆远离ROV机体的一侧均固定连接有升降滑轨,且两个升降滑轨的内部均滑动连接有升降滑块,两个升降滑块的同一侧均固定连接有吊架,两个吊架的底部固定连接有同一个垃圾收集分类箱,所述升降滑块的顶部和底部均固定连接有密封伸缩套板,且两个密封伸缩套板的另一端分别固定连接于升降滑轨的顶部内壁和底部内壁,升降滑轨的顶部固定连接有顶板,顶板的底部等距离固定连接有伸缩套筒,伸缩套筒为中空构造,伸缩套筒的底部固定连接于吊架的顶部,吊架和顶板之间位于伸缩套筒内部的相对一侧固定连接有高强度弹簧杆,所述悬浮气囊设于两个吊架之间,且两个顶板的相对一侧等距离固定连接有限位半圆柱,限位半圆柱的曲面与悬浮气囊接触,位于两端的两个限位半圆柱的顶部均等距离固定连接有防护杆,ROV机体的顶部固定连接有储气罐,ROV机体靠近储气罐出气端口的顶部固定连接有气泵,气泵的两端分别固定连接有一号管道和二号管道,一号管道的另一端插接于悬浮气囊的内部,二号管道的另一端插接于储气罐的出气端口,二号管道与出气端口之间设有密封套筒。
通过设置有悬浮调节组件,在进行垃圾的收集分类时,随着垃圾收集分类箱内部的垃圾重量的增加,则升降滑块在升降滑轨中向下滑动,滑动的过程中,伸缩套筒内的高强度弹簧杆随之拉伸,则通过高强度弹簧杆实现初步拉拽,降低垃圾重量对ROV机体前进造成的阻力,同时,启动气泵,气泵将储气罐内部的气体导入悬浮气囊中,使得悬浮气囊处于一个逐步膨胀的阶段,悬浮气囊逐步膨胀的过程中,限位半圆柱对其进行限定,防止其单个方向膨胀过度出现损坏,悬浮气囊逐步膨胀,则垃圾重量对ROV机体前进造成的阻力进一步被削弱,从而提高ROV机体单次收集到的垃圾量,提高ROV机体垃圾收集效率和降低反复深潜和上升的次数,降低成本投入。
在一个优选的方案中,所述垃圾收集分类箱的一侧开有门孔,且门孔的内部通过合页连接有箱门,垃圾收集分类箱靠近ROV机体的一侧开有安装孔,垃圾收集分类箱的内部设有垃圾分类组件。
在一个优选的方案中,所述垃圾分类组件包括筛板,且筛板的两侧均固定连接有两个滑动块,垃圾收集分类箱靠近每个滑动块的内壁均开有限位滑槽,滑动块滑动连接于相对应的限位滑槽的内部,垃圾收集分类箱的底部内壁固定连接有两个顶起液压缸,两个顶起液压缸的输出端均固定连接有推动块,推动块与筛板的底部相接触。
在一个优选的方案中,所述筛板的顶部固定连接有两个下板,且两个下板的顶部均等距离固定连接有震荡弹簧杆,垃圾收集分类箱的两侧内壁均固定连接有上板,震荡弹簧杆的另一端固定连接于相对应的上板的底部,垃圾收集分类箱的顶部内壁固定连接有驱动电机,驱动电机的输出轴通过联轴器固定连接有驱动轴,驱动轴的底部固定连接有转动圆盘,转动圆盘的底部等距离固定连接有细杆,每个细杆靠近底端的外侧均设有挂钩。
通过设置有垃圾分类组件,将垃圾导入垃圾收集分类箱中后,定期调节顶起液压缸对筛板进行推动,将其推动至靠近排出框的下方,继而顶起液压缸复位,则筛板处于一个下降的状态,震荡弹簧杆对其进行反复拉动震荡,加速其上方的垃圾通过筛板上的筛孔落入下方的空间,同时,当筛板移动至最高点后,启动驱动电机,驱动电机带动各个挂钩进行旋转,将筛板上方的体积较大的垃圾进行收集,避免该部分垃圾造成筛板上的筛孔被遮挡,从而确保筛板可以快速完成垃圾的筛选,提高垃圾分类效果。
在一个优选的方案中,所述ROV机体上设有垃圾收集组件,且垃圾收集组件包括进料框,进料框固定连接于ROV机体的内部,进料框的开口端开有凹槽,凹槽的内壁通过轴承连接有自转轴,自转轴的外侧环形分布有自转叶片,每个自转叶片的外侧均开有过水长孔。
在一个优选的方案中,所述进料框的一侧开有连通孔,且连通孔的内部固定连接有输送框,输送框的顶部固定连接有两个高压水泵,安装孔的内部固定连接有排出框,排出框位于筛板的上方,排出框的一侧开有对接孔,对接孔的内部固定连接有对接框,高压水泵的进入端通过管道连接于输送框的内部,高压水泵的输送端固定连接有输送长管,输送长管的另一端插接于对接框的内部。
通过设置有垃圾收集组件,在ROV机体移动的过程中,启动高压水泵,高压水泵通过进料框件沿途中的海水导入垃圾收集分类箱中,垃圾收集分类箱上的穿孔完成水体的排出,垃圾滞留于垃圾收集分类箱中,高压水泵产生的吸力带动自转轴旋转,从而带动自转叶片旋转,自转叶片的旋转防止大型的塑料垃圾附着于进料框的开口端造成垃圾无法进入。
在一个优选的方案中,所述ROV机体靠近顶端的两侧均固定连接有安装杆,且两个安装杆上均设有外端防护组件,外端防护组件包括橡胶轮胎。
在一个优选的方案中,所述安装杆的外侧固定连接有两个悬挂杆,且橡胶轮胎套接于悬挂杆的外侧,悬挂杆的另一端固定连接有限位圆板,橡胶轮胎的内部环形分布有弹性杆,每个弹性杆的另一端均设有金属撞击球,橡胶轮胎靠近中心点的内侧设有金属环板。
通过设置有外端防护组件,ROV机体在前进的过程中,橡胶轮胎在悬挂杆上晃动,橡胶轮胎内部的弹性杆上的金属撞击球撞击于金属环板的外侧,从而发出金属撞击的清脆声,这类的声音起到海洋生物驱赶的效果,同时,部分海洋生物移动至ROV机体外端,其撞击于橡胶轮胎上,橡胶轮胎发生形变,降低海洋生物受到的损伤程度,保护海洋生物。
一种垃圾收集和分类的深海ROV的使用方法,使用如根据上述所述的一种垃圾收集和分类的深海ROV装置,所述使用方法包括以下步骤:
步骤一:在ROV机体移动的过程中,启动高压水泵,高压水泵通过进料框件沿途中的海水导入垃圾收集分类箱中,垃圾收集分类箱上的穿孔完成水体的排出,垃圾滞留于垃圾收集分类箱中;
步骤二:将垃圾导入垃圾收集分类箱中后,定期调节顶起液压缸对筛板进行推动,将其推动至靠近排出框的下方,继而顶起液压缸复位,则筛板处于一个下降的状态,震荡弹簧杆对其进行反复拉动震荡,加速其上方的垃圾通过筛板上的筛孔落入下方的空间,同时,当筛板移动至最高点后,启动驱动电机,驱动电机带动各个挂钩进行旋转,将筛板上方的体积较大的垃圾进行收集,避免该部分垃圾造成筛板上的筛孔被遮挡,从而确保筛板可以快速完成垃圾的筛选;
步骤三:随着垃圾收集分类箱内部的垃圾重量的增加,则升降滑块在升降滑轨中向下滑动,滑动的过程中,伸缩套筒内的高强度弹簧杆随之拉伸,则通过高强度弹簧杆实现初步拉拽,降低垃圾重量对ROV机体前进造成的阻力,同时,启动气泵,气泵将储气罐内部的气体导入悬浮气囊中,使得悬浮气囊处于一个逐步膨胀的阶段,则垃圾重量对ROV机体前进造成的阻力进一步被削弱,ROV机体可以持续进行垃圾的收集分类。
由上可知,本发明提供的一种垃圾收集和分类的深海ROV装置具有在进行垃圾的收集分类时,随着垃圾收集分类箱内部的垃圾重量的增加,则升降滑块在升降滑轨中向下滑动,滑动的过程中,伸缩套筒内的高强度弹簧杆随之拉伸,则通过高强度弹簧杆实现初步拉拽,降低垃圾重量对ROV机体前进造成的阻力,同时,启动气泵,气泵将储气罐内部的气体导入悬浮气囊中,使得悬浮气囊处于一个逐步膨胀的阶段,悬浮气囊逐步膨胀的过程中,限位半圆柱对其进行限定,防止其单个方向膨胀过度出现损坏,悬浮气囊逐步膨胀,则垃圾重量对ROV机体前进造成的阻力进一步被削弱,从而提高ROV机体单次收集到的垃圾量,提高ROV机体垃圾收集效率和降低反复深潜和上升的次数,降低成本投入的技术效果。
附图说明
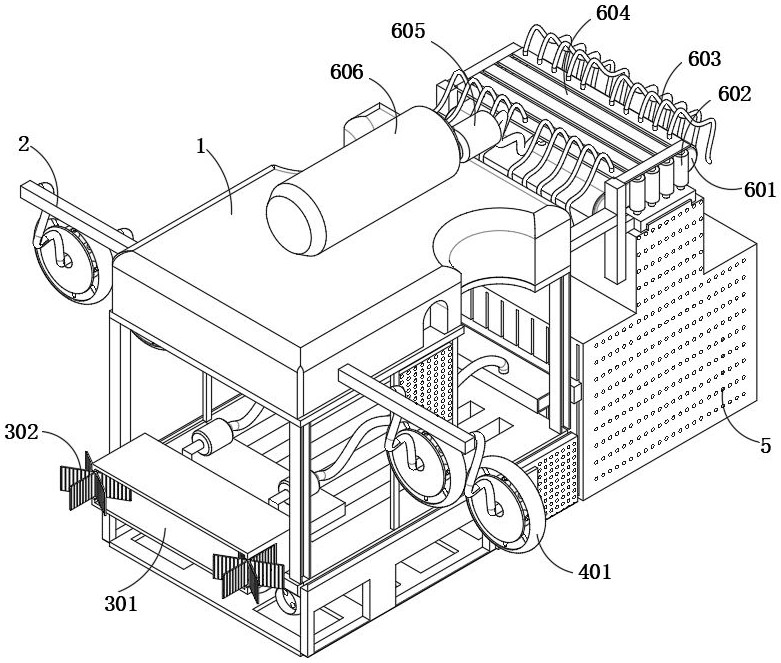
图1为本发明提出的一种垃圾收集和分类的深海ROV装置的整体结构示意图。
图2为图1的局部结构仰视图。
图3为本发明提出的一种垃圾收集和分类的深海ROV装置的悬浮调节组件示意图。
图4为图3的局部结构翻转图。
图5为本发明提出的一种垃圾收集和分类的深海ROV装置的垃圾收集分类箱结构剖视图。
图6为本发明提出的一种垃圾收集和分类的深海ROV装置的垃圾分类组件示意图。
图7为本发明提出的一种垃圾收集和分类的深海ROV装置的垃圾收集组件示意图。
图8为本发明提出的一种垃圾收集和分类的深海ROV装置的外端防护组件示意图。
图中:1、ROV机体;2、安装杆;3、垃圾收集组件;301、进料框;302、自转叶片;303、输送框;304、对接框;305、排出框;306、输送长管;307、高压水泵;308、自转轴;309、过水长孔;4、外端防护组件;401、橡胶轮胎;402、悬挂杆;403、金属撞击球;404、金属环板;405、限位圆板;406、弹性杆;5、垃圾收集分类箱;6、悬浮调节组件;601、悬浮气囊;602、伸缩套筒;603、防护杆;604、限位半圆柱;605、气泵;606、储气罐;607、连接杆;608、升降滑块;609、升降滑轨;610、密封伸缩套板;611、顶板;612、吊架;613、一号管道;614、高强度弹簧杆;615、二号管道;616、密封套筒;7、箱门;8、安装孔;9、垃圾分类组件;901、筛板;902、上板;903、滑动块;904、顶起液压缸;905、限位滑槽;906、下板;907、震荡弹簧杆;908、细杆;909、驱动电机;910、驱动轴;911、转动圆盘;912、挂钩。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明公开的一种垃圾收集和分类的深海ROV装置主要应用于现有的垃圾收集和分类的深海ROV在使用过程中,随着收集到的垃圾数量的增加,ROV本体加上垃圾的重量处于逐步增加的状态,当重量达到一个临界值后,ROV的前进存在有相当大的阻力,这就导致现有的深海ROV在垃圾收集方面存在较大的限制,单次能收集存储的垃圾量较小,导致深海ROV需要反复深潜和上升,造成深海垃圾收集效率的降低和成本的增加的场景。
参照图1-图8,一种垃圾收集和分类的深海ROV装置,包括ROV机体1,ROV机体1的外侧设有悬浮调节组件6,且悬浮调节组件6包括悬浮气囊601和两个连接杆607,两个连接杆607均固定连接于ROV机体1的外侧,两个连接杆607远离ROV机体1的一侧均固定连接有升降滑轨609,且两个升降滑轨609的内部均滑动连接有升降滑块608,两个升降滑块608的同一侧均固定连接有吊架612,两个吊架612的底部固定连接有同一个垃圾收集分类箱5,升降滑块608的顶部和底部均固定连接有密封伸缩套板610,且两个密封伸缩套板610的另一端分别固定连接于升降滑轨609的顶部内壁和底部内壁,升降滑轨609的顶部固定连接有顶板611,顶板611的底部等距离固定连接有伸缩套筒602,伸缩套筒602为中空构造,伸缩套筒602的底部固定连接于吊架612的顶部,吊架612和顶板611之间位于伸缩套筒602内部的相对一侧固定连接有高强度弹簧杆614,悬浮气囊601设于两个吊架612之间,且两个顶板611的相对一侧等距离固定连接有限位半圆柱604,限位半圆柱604的曲面与悬浮气囊601接触,位于两端的两个限位半圆柱604的顶部均等距离固定连接有防护杆603,ROV机体1的顶部固定连接有储气罐606,ROV机体1靠近储气罐606出气端口的顶部固定连接有气泵605,气泵605的两端分别固定连接有一号管道613和二号管道615,一号管道613的另一端插接于悬浮气囊601的内部,二号管道615的另一端插接于储气罐606的出气端口,二号管道615与出气端口之间设有密封套筒616。
再具体的应用场景中,在进行垃圾的收集分类时,随着垃圾收集分类箱5内部的垃圾重量的增加,则升降滑块608在升降滑轨609中向下滑动,滑动的过程中,伸缩套筒602内的高强度弹簧杆614随之拉伸,则通过高强度弹簧杆614实现初步拉拽,降低垃圾重量对ROV机体1前进造成的阻力,同时,启动气泵605,气泵605将储气罐606内部的气体导入悬浮气囊601中,使得悬浮气囊601处于一个逐步膨胀的阶段,悬浮气囊601逐步膨胀的过程中,限位半圆柱604对其进行限定,防止其单个方向膨胀过度出现损坏,悬浮气囊601逐步膨胀,则垃圾重量对ROV机体1前进造成的阻力进一步被削弱,从而提高ROV机体1单次收集到的垃圾量,提高ROV机体1垃圾收集效率和降低反复深潜和上升的次数,降低成本投入。
参照图1、图5和图6,在一个优选的实施方式中,垃圾收集分类箱5的一侧开有门孔,且门孔的内部通过合页连接有箱门7,垃圾收集分类箱5靠近ROV机体1的一侧开有安装孔8,垃圾收集分类箱5的内部设有垃圾分类组件9。
参照图1、图5和图6,在一个优选的实施方式中,垃圾分类组件9包括筛板901,且筛板901的两侧均固定连接有两个滑动块903,垃圾收集分类箱5靠近每个滑动块903的内壁均开有限位滑槽905,滑动块903滑动连接于相对应的限位滑槽905的内部,垃圾收集分类箱5的底部内壁固定连接有两个顶起液压缸904,两个顶起液压缸904的输出端均固定连接有推动块,推动块与筛板901的底部相接触,筛板901的顶部固定连接有两个下板906,且两个下板906的顶部均等距离固定连接有震荡弹簧杆907,垃圾收集分类箱5的两侧内壁均固定连接有上板902,震荡弹簧杆907的另一端固定连接于相对应的上板902的底部,垃圾收集分类箱5的顶部内壁固定连接有驱动电机909,驱动电机909的输出轴通过联轴器固定连接有驱动轴910,驱动轴910的底部固定连接有转动圆盘911,转动圆盘911的底部等距离固定连接有细杆908,每个细杆908靠近底端的外侧均设有挂钩912。
具体的,将垃圾导入垃圾收集分类箱5中后,定期调节顶起液压缸904对筛板901进行推动,将其推动至靠近排出框305的下方,继而顶起液压缸904复位,则筛板901处于一个下降的状态,震荡弹簧杆907对其进行反复拉动震荡,加速其上方的垃圾通过筛板901上的筛孔落入下方的空间,同时,当筛板901移动至最高点后,启动驱动电机909,驱动电机909带动各个挂钩912进行旋转,将筛板901上方的体积较大的垃圾进行收集,避免该部分垃圾造成筛板901上的筛孔被遮挡,从而确保筛板901可以快速完成垃圾的筛选,提高垃圾分类效果。
参照图1、图2和图7,在一个优选的实施方式中,ROV机体1上设有垃圾收集组件3,且垃圾收集组件3包括进料框301,进料框301固定连接于ROV机体1的内部,进料框301的开口端开有凹槽,凹槽的内壁通过轴承连接有自转轴308,自转轴308的外侧环形分布有自转叶片302,每个自转叶片302的外侧均开有过水长孔309,进料框301的一侧开有连通孔,且连通孔的内部固定连接有输送框303,输送框303的顶部固定连接有两个高压水泵307,安装孔8的内部固定连接有排出框305,排出框305位于筛板901的上方,排出框305的一侧开有对接孔,对接孔的内部固定连接有对接框304,高压水泵307的进入端通过管道连接于输送框303的内部,高压水泵307的输送端固定连接有输送长管306,输送长管306的另一端插接于对接框304的内部。
参照图1、图2和图8,在一个优选的实施方式中,ROV机体1靠近顶端的两侧均固定连接有安装杆2,且两个安装杆2上均设有外端防护组件4,外端防护组件4包括橡胶轮胎401,安装杆2的外侧固定连接有两个悬挂杆402,且橡胶轮胎401套接于悬挂杆402的外侧,悬挂杆402的另一端固定连接有限位圆板405,橡胶轮胎401的内部环形分布有弹性杆406,每个弹性杆406的另一端均设有金属撞击球403,橡胶轮胎401靠近中心点的内侧设有金属环板404。
需要说明的是,ROV机体1在前进的过程中,橡胶轮胎401在悬挂杆402上晃动,橡胶轮胎401内部的弹性杆406上的金属撞击球403撞击于金属环板404的外侧,从而发出金属撞击的清脆声,这类的声音起到海洋生物驱赶的效果,同时,部分海洋生物移动至ROV机体1外端,其撞击于橡胶轮胎401上,橡胶轮胎401发生形变,降低海洋生物受到的损伤程度,保护海洋生物。
一种垃圾收集和分类的深海ROV的使用方法,使用如根据上述所述的一种垃圾收集和分类的深海ROV装置,使用方法包括以下步骤:
步骤一:在ROV机体1移动的过程中,启动高压水泵307,高压水泵307通过进料框301件沿途中的海水导入垃圾收集分类箱5中,垃圾收集分类箱5上的穿孔完成水体的排出,垃圾滞留于垃圾收集分类箱5中;
步骤二:将垃圾导入垃圾收集分类箱5中后,定期调节顶起液压缸904对筛板901进行推动,将其推动至靠近排出框305的下方,继而顶起液压缸904复位,则筛板901处于一个下降的状态,震荡弹簧杆907对其进行反复拉动震荡,加速其上方的垃圾通过筛板901上的筛孔落入下方的空间,同时,当筛板901移动至最高点后,启动驱动电机909,驱动电机909带动各个挂钩912进行旋转,将筛板901上方的体积较大的垃圾进行收集,避免该部分垃圾造成筛板901上的筛孔被遮挡,从而确保筛板901可以快速完成垃圾的筛选;
步骤三:随着垃圾收集分类箱5内部的垃圾重量的增加,则升降滑块608在升降滑轨609中向下滑动,滑动的过程中,伸缩套筒602内的高强度弹簧杆614随之拉伸,则通过高强度弹簧杆614实现初步拉拽,降低垃圾重量对ROV机体1前进造成的阻力,同时,启动气泵605,气泵605将储气罐606内部的气体导入悬浮气囊601中,使得悬浮气囊601处于一个逐步膨胀的阶段,则垃圾重量对ROV机体1前进造成的阻力进一步被削弱,ROV机体1可以持续进行垃圾的收集分类。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。