一种安防巡逻机器人
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及机器人技术领域,具体为一种安防巡逻机器人。
背景技术
伴随着我国社会经济稳步增长,越来越多的企业厂区、居民小区、商场不断的出现在国民生活中,这些场所对安全生产工作提出了新的特殊需求。通常情况下这些场所中的安全任务都是由安全巡查人员来完成,但是随着巡检范围不断扩大,室内外混合环境,用人成本的持续走高等因素,仅仅依靠安全巡查人员己经不能满足日益复杂化的安保需求。
而机器人能够通过编程和自动控制来执行诸如作业或移动等任务,而巡逻的机器人也是机器人中的一种,在目前的技术中巡逻机器人根据移动方式大致分为两种,一类是在地面上移动的,另一类是在预设轨道上移动,前者在地面路况复杂时巡逻机器人的移动会产生一定影响,后者在轨道运行时,当通过相邻轨道衔接处时,因会发生抖动,影响信息的采集,并且长此以往会导致内部器件的线路造成损坏。
发明内容
本发明的目的在于提供一种安防巡逻机器人,以解决上述背景技术中提出的问题。
为实现上述发明目的,本发明采用如下技术方案:
本发明提供的一种安防巡逻机器人,包括行走模块、采集模块、无线通信模块、供电模块以及远程控制站和远程手持遥控终端,其特征在于,还包括轨道和控制模块,所述轨道包括两个相对平行的钢轨管、沿钢轨管长度方向均匀设置在钢轨管之间的连接杆,以及沿钢轨管长度方向均匀连接在连接杆中部的支撑柱;
所述行走模块包括三组滚轮机构,三组所述滚轮机构滚动适配在两个钢轨管上,三组滚轮机构分别为第一滚轮机构、第二滚轮机构和第三滚轮机构,第一滚轮机构、第二滚轮机构和第三滚轮机构均包括支架、以及装配于支架上的四个滚轮组件;四个滚轮组件两两为一组分别纵向夹持固定于两个钢轨管上;
所述滚轮组件包括支撑柱、活动部、触发部以及锁止部,所述支撑柱的一端装配于支架上,所述支撑柱的内部分别形成有活动腔和储液腔,所述活动腔位于支撑柱靠近钢轨管的一端,且活动腔与出液腔之间连接有导通管;所述活动部包括从支撑柱一端贯穿伸入活动腔内部的活动柱,所述活动柱位于活动腔内部的一端设置有与活动腔适配的活塞,且活塞远离活动柱的一端安装有预紧弹簧,所述活动柱远离活塞的一端安装有滚轮组,且滚轮座内安装有与钢轨管适配的滚轮;所述触发部包括固定在支撑柱外侧的壳体、设置在壳体内部的开关,以及固定在活动柱外侧的触发杆,所述触发杆远离活动柱的一端延伸至为壳体内部形成触发端,所述触发端能够在活动柱与支撑柱相对位移时触发开关;所述锁止部包括安装在导通管上的电磁阀;
所述行走模块还包括两个驱动电机,两个所述驱动电机分别第二滚轮机构和第三滚轮机构的滚轮座上,以驱使对应的滚轮转动;
所述控制模块用于控制三组滚轮机构的电磁阀开合。
进一步地,所述采集模块包括双光云台相机以及拾音器,且所述双光云台相机由1路可见光相机和1路红外相机组成。
进一步地,所述远程控制站和远程手持遥控终端为小区的总监控中心。
进一步地,所述支撑柱与支架转动连接,且第二滚轮机构的支架分别与第一滚轮机构和第三滚轮机构的支架转动连接。
进一步地,所述第二滚轮机构的支架顶部安装有定位板,所述定位板的顶部安装有机壳,所述采集模块安装在机壳的顶部,所述无线通信模块以及供电模块安装在机壳的内部。
进一步地,所述开关包括对称设置在机壳内侧的激光发射器和激光接收器。
进一步地,所述钢轨管的横截面呈椭圆形,且钢轨管的横截面的长轴竖直设置,所述滚轮的中心位置处开设有与钢轨管适配的环形凹槽,环形凹槽的内侧设置有橡胶垫。
与现有技术相比,以上一个或多个技术方案存在以下有益效果:
本发明行走模块能够平衡的使安防巡逻机器人经过轨道上的凸起(该凸起为轨道布设时的焊接点),以避免在移动过程中因振动,而导致采集模块采集的数据模糊或导致电器件连接线松动,影响整体安防巡逻。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
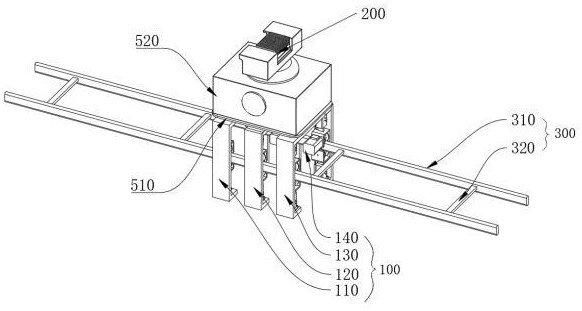
图1是本发明的第一视角结构示意图;
图2是本发明的第二视角结构示意图;
图3是本发明的滚轮组件第一视角结构示意图;
图4是本发明的滚轮组件第二视角结构示意图;
图5是本发明的滚轮组件剖视结构示意图;
图6是本发明的仰视结构示意图;
图7是本发明的第一阶段结构示意图;
图8是本发明的第二阶段结构示意图;
图9是本发明的第三阶段结构示意图。
图中:
100、行走模块;110、第一滚轮机构;120、第二滚轮机构;130、第三滚轮机构;140、驱动电机;
200、双光云台;
300、轨道;310、钢轨管;320、连接杆;
500、支架;510、定位板;520、机壳;
600、滚轮组件;610、支撑柱;620、活动部;630、触发部;640、锁止部;611、活动腔;612、储液腔;613、导通管;621、活动柱;622、活塞;623、预紧弹簧;624、滚轮座;625、滚轮;631、壳体;632、开关;632a、激光发射器;632b、激光接收器;633、触发杆。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分的实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
请参阅图1-图9,本发明提供了一种安防巡逻机器人,包括行走模块100、采集模块、无线通信模块、供电模块以及远程控制站和远程手持遥控终端;在使用时,行走模块100能够使机器人本体巡逻区域内移动安防巡逻,采集模块包括双目云台以及拾音器,双光云台200由1路可见光相机和1路红外相机组成能对图像进行采集,所有图像数据经过H.264编码通过综合控制器复用处理后,由自组网无线通信模块发送至远程控制站和远程手持遥控终端解码显示;同时双光云台200相机的云台通过综合控制器接收远程控制站和远程手持遥控终端的俯仰以及水平角度的控制,拾音器能将采集到的音频数据传输到远程控制站和远程手持遥控终端,具体地,综合控制器通过对拾音器输入的模拟声音信号进行PCM采样转换为数字音频信号,对数字音频信号编码后通过自组网无线通信模块发送至远程控制站和远程手持遥控终端,由其解码播放出声音,以完成对指定区域进行安防巡逻工作。
在本具体实施例中,安防巡逻机器人的运用场景为小区,收远程控制站和远程手持遥控终端为该小区的总监控中心。
为了方便安防巡逻机器人在小区内的移动,避免人为干涉,进一步地,安防巡逻机器人还包括与行走模块100适配的轨道300以及控制模块,所述轨道300包括两个相对平行的钢轨管310、沿钢轨管310长度方向均匀设置在钢轨管310之间的连接杆320,以及沿钢轨管310长度方向均匀连接在连接杆320中部的支撑架(未示出);该轨道300通过支撑架,可以将轨道300架设在小区围墙上,也可以将轨道300架设在小区空中,行走模块100搭载在轨道300上,使安防巡逻机器人得沿着轨道300移动对小区进行安防巡逻工作。
如图1-图5所示,在本具体实施例中,所述行走模块100包括三组滚轮机构,以及两个驱动电机140,三组所述滚轮625机滚动适配在两个钢轨管310上,三组滚轮机构分别为第一滚轮机构110、第二滚轮机构120和第三滚轮机构130,所述第一滚轮机构110、第二滚轮机构120和第三滚轮机构130均包括支架500、以及装配于支架500上的四个滚轮组件600;四个滚轮组件600两两为一组分别纵向夹持固定于两个钢轨管310上;具体的,所述滚轮组件600包括支撑柱610、活动部620、触发部630以及锁止部640,所述支撑柱610的一端装配于支架500上,所述支撑柱610的内部分别形成有活动腔611和储液腔612,所述活动腔611位于支撑柱610靠近钢轨管310的一端,且活动腔611与出液腔之间连接有导通管613;所述活动部620包括从支撑柱610一端贯穿伸入活动腔611内部的活动柱621,所述活动柱621位于活动腔611内部的一端设置有与活动腔611适配的活塞622,且活塞622远离活动柱621的一端安装有预紧弹簧623,所述活动柱621远离活塞622的一端安装有滚轮座624,滚轮座624内安装有与钢轨管310适配的滚轮625;所述触发部630包括固定在支撑柱610外侧的壳体631、设置在壳体631内部的开关632,以及固定在活动柱621外侧的触发杆633,所述触发杆633远离活动柱621的一端延伸至为壳体631内部形成触发端,所述触发端能够在活动柱621与支撑柱610相对位移时触发开关632;所述锁止部640包括安装在导通管613上的电磁阀;所述行走模块100还包括两个驱动电机140,两个所述驱动电机140分别第二滚轮机构120和第三滚轮机构130的滚轮座624上,以驱使对应的滚轮625转动;所述控制模块用于控制三组滚轮机构的电磁阀开合。
通过上述设计,行走模块100能够平衡的使安防巡逻机器人经过轨道300上的凸起(该凸起为轨道300布设时的焊接点),以避免在移动过程中因振动,而导致采集模块采集的数据模糊或导致电器件连接线松动,影响整体安防巡逻。
具体的,本技术中行走模块100在经过凸起时,第一滚轮机构110、第二滚轮机构120和第三滚轮机构130能通过改变对应电磁阀的开启,使其使经过凸起的滚轮机构变为与轨道300可伸缩的接触,以发生收缩,从而使安防巡逻机器人平稳的经过凸起;更为具体的在经过凸起过程中,第一滚轮机构110、第二滚轮机构120和第三滚轮机构130的状态可分为以下四个阶段;
第一阶段,如图7所示,第一滚轮机构110的电磁阀为开启状态,而第二滚轮机构120和第三滚轮机构130的电磁阀为关闭状态,此时第一滚轮机构110中两两为一组滚轮组件600,由于电磁阀呈开启状态,活塞622可发生移动,滚轮组件600的滚轮625靠预紧弹簧623的弹力使得两个滚轮625抵触夹持在钢轨管310上;而第二滚轮机构120和第三滚轮机构130中两两为一组滚轮组件600,由于电磁阀呈关闭状态,此时活动腔611内充满液压油,活塞622无法上移,滚轮组件600的滚轮625不可伸缩的抵触在钢轨管310上,整个安防巡逻机器人靠第二滚轮机构120和第三滚轮机构130其支撑定位作用,使其牢牢固定在轨道300上,以避免安防巡逻机器人在移动过程中发生振动,导致电器连接线松动或导致采集信息模糊。
第二阶段,如图8所示,当第一滚轮机构110经过凸起时,活动柱621会相对于支撑柱610发生相对位移,固定于活动柱621的触发杆633触发端会触发一次开关632,此时,控制模块控制第一滚轮机构110的电磁阀会由开启状态变为关闭状态,第二滚轮机构120的电磁阀会由关闭状态变为开启状态,进而使得第二滚轮机构120的滚轮组件600的滚轮625可伸缩的抵触在钢轨管310上,以便第二滚轮机构120通过凸起,第一滚轮机构110和第三滚轮机构130的滚轮组件600滚轮625不可伸缩的抵触在钢轨管310上,整个安防巡逻机器人靠第一滚轮机构110和第三滚轮机构130其支撑定位作用,使其牢牢固定在轨道300上。
第三阶段,如图9所示,随着安防巡逻机器人在轨道300上移动,当第二滚轮机构120经过凸起后,控制模块控制第二滚轮机构120的电磁阀会由开启状态变为关闭状态,第三滚轮机构130的电磁阀会由关闭状态变为开启状态,进而使得第三滚轮机构130的滚轮组件600的滚轮625可伸缩的抵触在钢轨管310上,以便第三滚轮机构130通过凸起,第一滚轮机构110和第二滚轮机构120的滚轮组件600滚轮625不可伸缩的抵触在钢轨管310上,整个安防巡逻机器人靠第一滚轮机构110和第二滚轮机构120其支撑定位作用,使其牢牢固定在轨道300上;
第四阶段,随着安防巡逻机器人在轨道300上移动,当第三滚轮机构130经过凸起后,控制模块控制第三滚轮机构130的电磁阀会由开启状态变为关闭状态,第一滚轮机构110的电磁阀会由关闭状态变为开启状态,重新恢复至第一阶段中。
在本具体实施例中,所述支撑柱610与支架500转动连接,第二滚轮机构120的支架500分别与第一滚轮机构110和第三滚轮机构130的支架500转动连接。以便行走模块100能经过平稳通过弯曲的轨道300。
在本具体实施例中,第二滚轮机构120的支架500顶部安装有定位板510,所述定位板510的顶部安装有机壳520,所述采集模块安装在机壳520的顶部,所述无线通信模块以及供电模块安装在机壳520的内部。
如图5所示,在本具体实施例中,所述开关632包括对称设置在壳体631内侧的激光发射器623a和激光接收器623b。当滚轮机构经过凸起时,活动柱621会相对于支撑柱610发生相对位移,触杆杆上下发生位移,触杆杆的触发端会进入激光发射器623a和激光接收器623b之间以阻断激光,然后移出激光发射器623a和激光接收器623b之间使得二者之间激光重新连通,依次作为触发信号。
在本具体实施例中,所述钢轨管310的横截面呈椭圆形,且钢轨管310的横截面的长轴竖直设置,所述滚轮625的中心位置处开设有与钢轨管310适配的环形凹槽,且环形凹槽的内部设置有橡胶垫。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。