基于北斗定位技术的停车管理系统及方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及停车管理技术领域,尤其涉及一种基于北斗定位技术的停车管理系统及方法。
背景技术
城市交通中的乱停车现象一直是城市中的顽疾,对道路的通畅以及行人安全均存在严重影响,如何规范驾驶员的驾驶行为,对违反交通规则的行为及时准确的进行取证查处,是道路监控的关键问题。
目前,道路监控的方式基本还停留在人工操作监控,发现违章停车情况时,执法人员手动控制云台摄像机进行拉近、拍摄车辆的车牌号码及交通标志等,完成后手动恢复摄像机预置位。
这种操作监控方式过程复杂繁琐,人工成本高,执法人员由于高强度工作,或者其他个人原因,违章判断准确性容易降低。
发明内容
本发明的主要目的在于提供一种基于北斗定位技术的停车管理系统及方法,旨在实现道路停车的无人监控,降低人工成本,提高侦测乱停车、违章停车准确性。
为实现上述目的,本发明提出一种基于北斗定位技术的停车管理系统,包括:
中央处理器控制模块:用于根据车辆位置信息和禁止停车位置数据判断车辆是否处于违停位置;
车辆检测模块:所述车辆检测模块内置有加速度传感器,所述车辆检测模块用于检测车辆是否处于静止状态,并向所述中央处理器发送加速度数据;
北斗定位模块:用于获取车辆位置信息,向所述中央处理器回传定位数据;
数据存储模块;所述数据存储模块与所述中央处理器进行HTTP连接,用于存储禁止停车位置数据和违停车辆数据;
违章警示模块;所述违章警示模块用于向车主推送违章警示。
本发明的进一步技术方案是,所述中央处理器控制模块采用STM32系列中心控制芯片,用于统一控制所述车辆检测模块、北斗定位模块、数据存储模块和违章警示模块。
本发明的进一步技术方案是,所述北斗定位模块采用DA465型芯片。
本发明的进一步技术方案是,所述数据处理模块采用云存储方式存储数据。
本发明的进一步技术方案是,所述违章警示模块采用外置显示器,与所述中央处理器模块连接,用于接收所述中央处理器发送的是否违章数据,并向车主推送违章警示。
为实现上述目的,本发明还提出一种基于北斗定位技术的停车管理方法,所述方法应用于如上所述的基于北斗定位技术的停车管理系统,所述方法包括以下步骤:
步骤S10,所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车;
步骤S20,如果车辆是停车,所述北斗定位模块则获取车辆实时定位数据;
步骤S30,所述中央处理器模块从所述存储模块获取禁止停车位置数据,将所述禁止停车数据与所述车辆实时定位数据进行比对,判断车辆是否违章停车;
步骤S40,若是,所述违章警示模块则向车主显示当前车辆禁止停车位置,并存储违章车辆信息和车主信息。
本发明的进一步技术方案是,所述步骤S10,所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车的步骤之后还包括:
若所述车辆没停车,则返回执行所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车的步骤。
本发明的进一步技术方案是,所述步骤S30,所述中央处理器模块从所述存储模块获取禁止停车位置数据,将所述禁止停车数据与所述车辆实时定位数据进行比对,判断车辆是否违章停车的步骤之后还包括:
若车辆没有违章停车,则返回执行所述步骤S30。
本发明基于北斗定位技术的停车管理系统及方法的有益效果是:
本发明通过上述技术方案,基于北斗定位技术获取车辆位置信息,向所述中央处理器回传定位数据,中央处理器根据车辆位置信息和禁止停车位置数据判断车辆是否处于违停位置,违章警示模块用于向车主推送违章警示,提升了车辆违停判断准确性,降低了人工成本。
附图说明
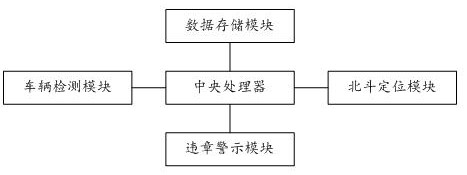
图1是本发明基于北斗定位技术的停车管理系统的框架示意图;
图2是本发明基于北斗定位技术的停车管理的流程示意图。
实施方式
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
为了克服传统人工操作监控过程复杂繁琐、人工成本高、判断准确率低的缺点,本发明提出一种基于北斗定位技术的停车管理系统。本发明安装于被检测车辆,对被检测车辆实时定位,检测其停车时是否在违章停车处,有效的降低人工成本投入,检测过程简单、快捷、有效、准确性高。
参照图1所示,本发明提出一种基于北斗定位技术的停车管理系统,该系统包括中央处理器控制模块、车辆检测模块、北斗定位模块、数据存储模块和违章警示模块,其中,所述车辆检测模块、北斗定位模块、数据存储模块和违章警示模块分别与所述中央处理器控制模块连接。
所述车辆检测模块内置有加速度传感器,所述车辆检测模块用于检测车辆是否处于静止状态,并向所述中央处理器发送加速度数据。
北斗定位模块:用于获取车辆位置信息,向所述中央处理器回传定位数据。
数据存储模块;所述数据存储模块与所述中央处理器进行HTTP连接,用于存储禁止停车位置数据和违停车辆数据。
违章警示模块;所述违章警示模块用于向车主推送违章警示。
其中,所述中央处理器控制模块采用STM32系列中心控制芯片,用于统一控制所述车辆检测模块、北斗定位模块、数据存储模块和违章警示模块。
本实施例中,所述北斗定位模块采用DA465型芯片。
本实施例中,所述数据处理模块采用云存储方式存储数据。
本实施例中,所述违章警示模块采用外置显示器,与所述中央处理器模块连接,用于接收所述中央处理器发送的是否违章数据,并向车主推送违章警示。
本发明基于北斗定位技术的停车管理的有益效果是:
本发明通过上述技术方案,基于北斗定位技术获取车辆位置信息,向所述中央处理器回传定位数据,中央处理器根据车辆位置信息和禁止停车位置数据判断车辆是否处于违停位置,违章警示模块用于向车主推送违章警示,提升了车辆违停判断准确性,降低了人工成本。
为实现上述目的,本发明还提出一种基于北斗定位技术的停车管理方法,所述方法应用于如上实施例所述的基于北斗定位技术的停车管理系统,请参照图2,所述方法包括以下步骤:
步骤S10,所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车。
步骤S20,如果车辆是停车,所述北斗定位模块则获取车辆实时定位数据;
步骤S30,所述中央处理器模块从所述存储模块获取禁止停车位置数据,将所述禁止停车数据与所述车辆实时定位数据进行比对,判断车辆是否违章停车。
步骤S40,若是,所述违章警示模块则向车主显示当前车辆禁止停车位置,并存储违章车辆信息和车主信息。
本实施例中,所述步骤S10,所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车的步骤之后还包括:
若所述车辆没停车,则返回执行所述车辆检测模块根据加速度传感器获得的车辆加速度判断车辆是否停车的步骤。
本实施例中,所述步骤S30,所述中央处理器模块从所述存储模块获取禁止停车位置数据,将所述禁止停车数据与所述车辆实时定位数据进行比对,判断车辆是否违章停车的步骤之后还包括:
若车辆没有违章停车,则返回执行所述步骤S30。
本发明基于北斗定位技术的停车管理方法的有益效果是:
本发明通过上述技术方案,基于北斗定位技术获取车辆位置信息,向所述中央处理器回传定位数据,中央处理器根据车辆位置信息和禁止停车位置数据判断车辆是否处于违停位置,违章警示模块用于向车主推送违章警示,提升了车辆违停判断准确性,降低了人工成本。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。