一种无人机分段测量大气透过率的装置及测量方法
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及一种测量大气透过率的装置及测量方法,特别是涉及一种无人机分段测量大气透过率的装置及测量方法,属于大气透过率测量技术领域。
背景技术
大气透过率是反映大气辐射传输性质的重要参量,在大气辐射、地球资源遥感环境监测、空间目标监测等应用中具有重要的参考价值。空间目标的红外辐射特性是目标识别、在轨信息判定的重要依据之一。红外辐射特性包括目标的温度和辐射照度等信息,通常采用地基测量方法进行测量。在地基测量中,获得高精度的中波红外整层大气透过率意义重大。
在激光大气传输及自适应光学中,显然直接测量光路上的大气消光特性更有意义。目前,除激光雷达外,其他被动式测量仪器都无法对指定路径上的大气消光特性进行测量,而激光雷达的测量结果的好坏与反演算法及消光系数边界值的选取有极大关系。确定消光系数边界值的常用方法是在对流层顶附近选择气溶胶含量最小的高度作为标定点,假设该点气溶胶的散射比为某一很小的定值。但进行指定光束路径上的测量时,雷达的有效探测距离不一定能达到对流层顶。国内外有学者提出了一些迭代和估算的方法,Kovalev提出了一种迭代算法,利用大气气溶胶和大气分子的消光系数定义一个信号校正因子,通过迭代对信号进行校正得到大气气溶胶消光系数边界值。但是该方法校正因子的修正量不易控制,并且迭代次数较多。王治华等在处理有云层的激光雷达回波信号时,将激光雷达信号在大气中的传输过程分为云层区和非云层区,忽略回波信号中的云层区信息,利用最小二乘法对非云层区的激光雷达回波信号进行拟合得到大气消光系数的边界值。但是该方法忽略了真实大气是非均匀分布的,导致计算结果出现一定的偏差。陈涛等提出了一种散射比迭代法,该方法在探测范围内寻找到一个气溶胶含量相对较小的高度层,建立回波信号与边界值之间的等式关系,利用穷举法获得该高度处的气溶胶散射比并以此来确定边界值,获得了较为准确的反演结果。但是该方法是等步长迭代,要获取一个合适的气溶胶散射比需要较多的迭代次数、计算量大。孙国栋等提出利用Broyden算法求解非线性方程确定大气消光系数边界值的方法,并与1km的水平路径测量结果对比,两种方法的结果在时间变化趋势上有较好的一致性,但是其只考虑单次散射而忽略了多次散射的影响。
从以上分析可以看出,研究指定路径上大气消光特性测量方法和激光雷达标定方法,对激光雷达测得的指定路径上的大气消光特性曲线进行标定有着重大的实际意义。
发明内容
本发明的主要目的是为了解决现有技术的不足,而提供一种无人机分段测量大气透过率的装置及测量方法。
本发明的目的可以通过采用如下技术方案达到:
一种无人机分段测量大气透过率的装置,包括信标多旋翼无人机、测量多旋翼无人机和无人机地面站,所述信标多旋翼无人机上固定安装有第一斯坦尼康稳定云台,所述第一斯坦尼康稳定云台的上方设有LED灯,所述测量多旋翼无人机上安装第二斯坦尼康稳定云台、微型电脑和数传,所述第二斯坦尼康稳定云台的上方安装有接收望远镜和探测器。
优选的,所述LED灯为信标光源。
一种无人机分段测量大气透过率的装置的测量方法,包括以下步骤:
步骤1:根据待测路径在地面站电脑上设置两个无人机的飞行路径;
步骤2:地面站发送控制信号给飞行器的飞控,控制两台飞行器飞到待测路径的起始点附近;
步骤3:根据待测路径的方位角和俯仰角来调节两飞行器上的仪器的指向,使所述LED灯与所述接收望远镜相对;
步骤4:在地面站电脑上设定飞行路径上的若干航点及每个航点的停留时间并将任务分别上传给两无人机的飞控;
步骤5:飞控按照地面站的设置控制无人机按照飞行任务飞行,所述接收望远镜对所述LED灯的光辐射进行接收,探测器将接受望远镜接收到的光辐射转换为电信号输出。
优选的,在测量过程中,所述数传将俩无人机的实时位置及接收望远镜接收到的光强传回地面站。
优选的,根据两无人机的位置和相应时刻的光强可反演出待测路径上不同分段上的距离与光强信息。
优选的,所述探测器测得的光强可用如下公式表示:
式中,J为光源的辐射强度,V为探测器测得的电信号,τ为光源与探测器之间的大气透过率,R为光源到探测器的距离,k为探测器的响应度。
优选的,假设所述LED灯的辐射面积为S,辐射出射度为M,出射角为θ,那么其辐射强度可表示为:
由式和式可得:
进一步,优选的,所述两个无人机分段测量路径为:
步骤1:选择测量路径上的四个点分别为A、B、C和D,并设定AB=R0,BC=R1,CD=R2;
步骤2:假设AB之间的透过率为τ1,BC之间的透过率为τ2,CD之间的透过率为τ3;
步骤3:当LED灯在A点,探测器在B点,,测得信号为V1;
步骤4:当LED灯仍在A点,探测器移动到C点时,测得信号为V2;
步骤5:当LED灯移动到B点,探测器在C点时,测得信号为V3;
步骤6:当LED灯保持在B点,探测器在D点时,测得信号为V4;
步骤7:当LED灯移动到C点,探测器仍在D点时,测得信号为V5。
优选的,每个测量路段上的透过率计算公式如下:
将式和式相除可得:
同理将式和式相除可得:
将式和式相除可得:
本发明的有益技术效果:
1、本发明利用两多旋翼无人机对测量路径的分段测量并将测量数据进行对比计算的数学处理方法,消除了目标光源和测量仪器定标误差的影响,能够提高大气透过率的测量精度。
2、本发明提出的测量方法是从透过率的定义出发,利用多旋翼无人机的稳定性,可实现空间上指定路径、距离上的大气消光测量。
3、由于LED灯等发散角较大,无法进行全接收,接收望远镜接收到的光强与距离的平方成反比,本发明用双无人机交替移动测量的方法,克服了探测器与信标光源较远时信噪比低的问题,可实现长距离的测量。
4、本发明采用斯坦尼康的稳定云台结构,在测量中信保光与接收装置相对距离及指向不受无人机自身姿态的影响,受无人机影响较小。
附图说明
图1为本发明所用LED出射光强分布图。
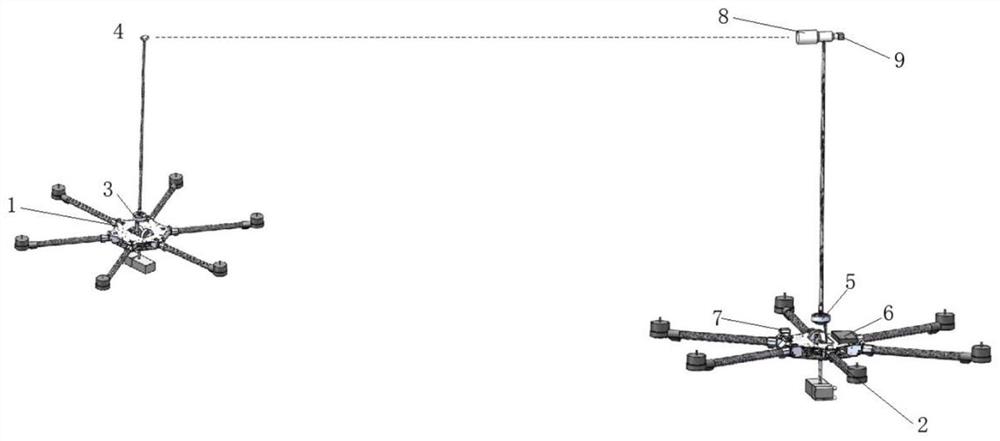
图2为本发明装置组成结构图。
图3为本发明中无人机进行分段测量时的飞行顺序图。
图中:1-信标多旋翼无人机,2-测量多旋翼无人机,3-第一斯坦尼康稳定云台,4-LED灯,5-第二斯坦尼康稳定云台,6-微型电脑,7-数传,8-接收望远镜,9-探测器。
具体实施方式
为使本领域技术人员更加清楚和明确本发明的技术方案,下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
如图1-图3所示,本实施例提供的无人机分段测量大气透过率的装置,包括信标多旋翼无人机1、测量多旋翼无人机2和无人机地面站,信标多旋翼无人机1上固定安装有第一斯坦尼康稳定云台3,第一斯坦尼康稳定云台3的上方设有LED灯4,测量多旋翼无人机2上安装第二斯坦尼康稳定云台5、微型电脑6和数传7,第二斯坦尼康稳定云台5的上方安装有接收望远镜8和探测器9。LED灯4为信标光源。
在本实施例中,如图1所示,一种无人机分段测量大气透过率的装置的测量方法,包括以下步骤:
步骤1:根据待测路径在地面站电脑上设置两个无人机的飞行路径;
步骤2:地面站发送控制信号给飞行器的飞控,控制两台飞行器飞到待测路径的起始点附近;
步骤3:根据待测路径的方位角和俯仰角来调节两飞行器上的仪器的指向,使LED灯4与接收望远镜8相对;
步骤4:在地面站电脑上设定飞行路径上的若干航点及每个航点的停留时间并将任务分别上传给两无人机的飞控;
步骤5:飞控按照地面站的设置控制无人机按照飞行任务飞行,接收望远镜8对LED灯4的光辐射进行接收,探测器将接受望远镜接收到的光辐射转换为电信号输出。
在测量过程中,数传7将俩无人机的实时位置及接收望远镜8接收到的光强传回地面站。
根据两无人机的位置和相应时刻的光强可反演出待测路径上不同分段上的距离与光强信息。
探测器9测得的光强可用如下公式表示:
式中,J为光源的辐射强度,V为探测器测得的电信号,τ为光源与探测器9之间的大气透过率,R为光源到探测器的距离,k为探测器的响应度。
假设LED灯4的辐射面积为S,辐射出射度为M,出射角为θ,那么其辐射强度可表示为:
由1式和2式可得:
两个无人机分段测量路径为:
步骤1:选择测量路径上的四个点分别为A、B、C和D,并设定AB=R0,BC=R1,CD=R2;
步骤2:假设AB之间的透过率为τ1,BC之间的透过率为τ2,CD之间的透过率为τ3;
步骤3:当LED灯4在A点,探测器9在B点,,测得信号为V1;
步骤4:当LED灯4仍在A点,探测器9移动到C点时,测得信号为V2;
步骤5:当LED灯4移动到B点,探测器9在C点时,测得信号为V3;
步骤6:当LED灯4保持在B点,探测器9在D点时,测得信号为V4;
步骤7:当LED灯4移动到C点,探测器9仍在D点时,测得信号为V5。
每个测量路段上的透过率计算公式如下:
将4式和5式相除可得:
同理将5式和6式相除可得:
将6式和7式相除可得:
综上所述,在本实施例中,按照本实施例的无人机分段测量大气透过率的装置及测量方法,本实施例提供的无人机分段测量大气透过率的装置及测量方法,通过对测量路径的密集采样测量并将测量数据进行对比计算的数学处理方法,得到测量路径上的大气透过率及大气衰减系数,消除了目标光源和测量仪器定标误差的影响,能够提高大气透过率的测量精度。
以上所述,仅为本发明进一步的实施例,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明所公开的范围内,根据本发明的技术方案及其构思加以等同替换或改变,都属于本发明的保护范围。
- 一种无人机分段测量大气透过率的装置及测量方法
- 一种高精度大气透过率测量装置及测量方法