基于互联网的人体动作识别监控设备用传动机构
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及监控设备技术领域,尤其涉及一种基于互联网的人体动作识别监控设备用传动机构。
背景技术
人体动作识别在视频监控、视频检索、人机交互、虚拟现实、医疗看护等领域具有深远的理论研究意义和很强的实用价值,现有技术中,用于人体动作识别的监控设备往往需要配套的控制装置,监控设备捕捉人体动作时,往往需要主动调整监控设备角度,从而获得最佳视角,避免出现遗漏,因此需要一种多角度调节传动装置。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于互联网的人体动作识别监控设备用传动机构。
为了实现上述目的,本发明采用了如下技术方案:
基于互联网的人体动作识别监控设备用传动机构,包括底座及设置在底座上侧的基座,所述基座上侧嵌设有伸缩柱,所述伸缩柱下端设有活塞,所述基座内开设有与活塞适配的液压缸,所述液压缸底部开设有油道,所述油道上设有控制阀,所述基座一侧设有与油道相通的油泵,所述伸缩柱顶部通过球节连接有底板,所述底板上侧设有转台,所述底板与转台之间设有旋转装置,所述旋转装置包括驱动齿轮、电机及离合器,所述转台上侧设有安装座。
优选的,所述伸缩柱与基座之间滑动连接,所述伸缩柱设有三组,且呈三角状分布于基座上侧。
优选的,所述液压缸与伸缩柱对应设置,且之间通过油道相通,所述控制阀设有多组,且与液压缸对应设置。
优选的,所述基座内设有控制装置,所述控制装置内设有89C51单片机,所述底板上侧设有继电器,所述控制装置与继电器之间电性连接。
优选的,所述继电器与电机及离合器之间电性连接。
优选的,所述转台与底板之间通过转轴转动连接,所述转轴上设有从动齿轮,所述从动齿轮一侧啮合有中间轮。
优选的,所述离合器与底板之间转动连接,所述离合器上设有与驱动齿轮啮合的惰轮。
优选的,所述中间轮通过离合器与惰轮活动连接,所述电机输出轴与驱动齿轮固定连接。
本发明的有益效果为:
与现有技术相比,本发明通过液压系统控制底板上下移动和侧倾,便于调节监控设备高度及倾斜角度,同时通过旋转装置控制转台360°转动,便于快速捕捉人体动作,提高设备灵活性。
附图说明
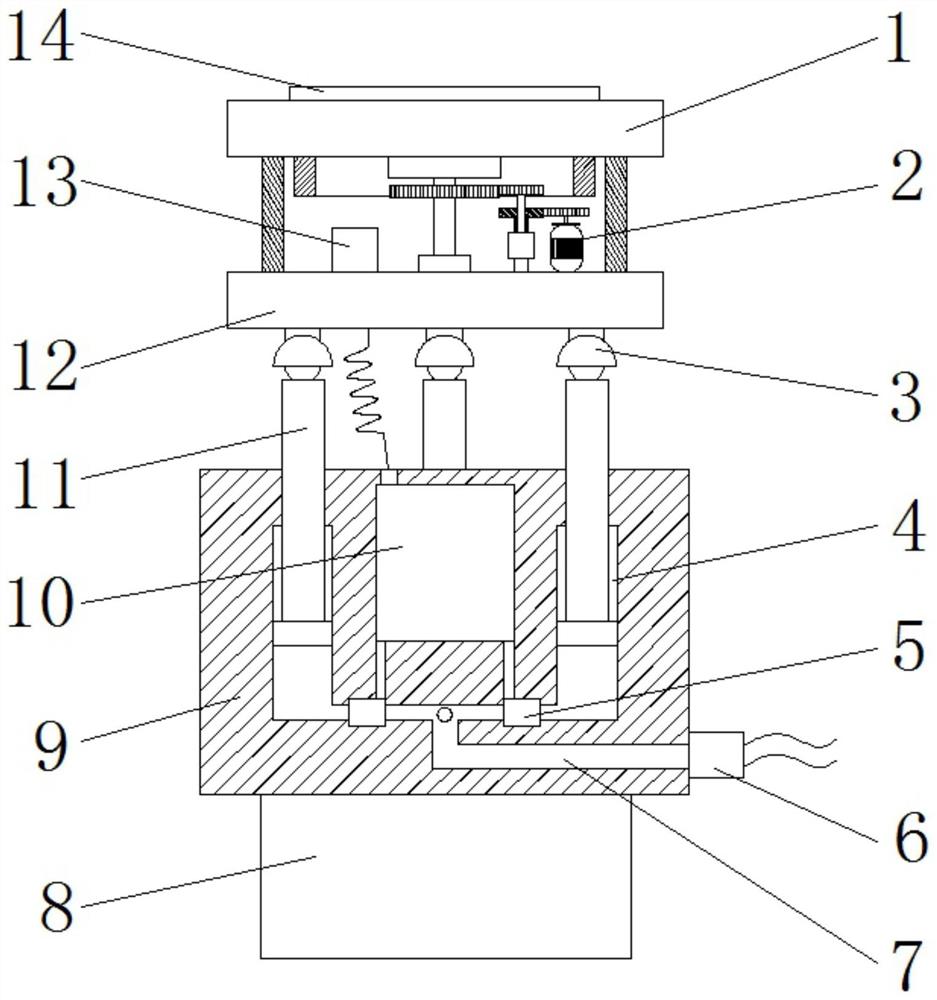
图1为本发明提出的基于互联网的人体动作识别监控设备用传动机构的主视剖视结构示意图;
图2为本发明提出的基于互联网的人体动作识别监控设备用传动机构的旋转装置结构示意图;
图3为本发明提出的基于互联网的人体动作识别监控设备用传动机构的基座俯视结构示意图。
图中:1转台、2旋转装置、21驱动齿轮、22电机、23离合器、24从动齿轮、25中间轮、3球节、4液压缸、5控制阀、6油泵、7油道、8底座、9基座、10控制装置、11伸缩柱、12底板、13继电器、14安装座。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1-3,基于互联网的人体动作识别监控设备用传动机构,包括底座8及设置在底座8上侧的基座9,基座9上侧嵌设有伸缩柱11,伸缩柱11下端设有活塞,基座9内开设有与活塞适配的液压缸4,液压缸4底部开设有油道7,油道7上设有控制阀5,基座9一侧设有与油道7相通的油泵6,伸缩柱11顶部通过球节3连接有底板12,底板12上侧设有转台1,底板12与转台1之间设有旋转装置2,旋转装置2包括驱动齿轮21、电机22及离合器23,转台1上侧设有安装座14。
实施例一,伸缩柱11与基座9之间滑动连接,伸缩柱11设有三组,且呈三角状分布于基座9上侧,便于调节底板12角度及高度。
具体地,液压缸4与伸缩柱11对应设置,且之间通过油道7相通,控制阀5设有多组,且与液压缸4对应设置,通过油压控制伸缩柱11上下移动。
具体地,基座9内设有控制装置10,控制装置10内设有89C51单片机,底板12上侧设有继电器13,控制装置10与继电器13之间电性连接,通过控制装置10实现控制阀5自动调压。
具体地,继电器13与电机22及离合器23之间电性连接,自动化控制电机22转动及离合器23离合。
具体地,转台1与底板12之间通过转轴转动连接,转轴上设有从动齿轮24,从动齿轮24一侧啮合有中间轮25,离合器23与底板12之间转动连接,离合器23上设有与驱动齿轮21啮合的惰轮,中间轮25通过离合器23与惰轮活动连接,所述电机22输出轴与驱动齿轮21固定连接,通过齿轮组将电机22动力传递给转台1。
实施例二,旋转装置2可直接替换为伺服电机,实现转速控制及转动角度控制,完成监控设备旋转任务。
实施例三,旋转装置2还可替换为液压马达,通过液压系统控制液压马达旋转。
本实施例中,监控设备捕捉到人体1动作,产生调节信号,通过控制装置10控制伸缩柱11上下移动,改变底板12高度及角度,同时电机22及离合器23开始工作,控制转台1转动一定角度,重新捕捉人体动作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
- 基于互联网的人体动作识别监控设备用传动机构
- 一种基于互联网的人脸识别的闸机传动机构