一种煤矿用处理冒顶的机器人
文献发布时间:2023-06-19 12:13:22
技术领域
本申请涉及矿用设备技术领域,尤其涉及一种煤矿用处理冒顶的机器人。
背景技术
在松软的煤、岩层及地质破碎带、断层带掘进井巷时经常发生巷道顶板意外冒落,发生顶板意外冒落后处理困难大,风险高需要作业人员进入冒顶区域进行勘察后制定处理方案并实施,实施过程人员仍需进入冒顶区域。冒顶区域顶板不稳定发生二次冒落的风险极大,巷道空间有限大型支护设备无法运输及安装,为了提高处理顶板意外冒落巷修作业的安全性和工程质量,需要研发一种能够在冒顶区域完成巷修作业的机器人。
发明内容
本申请的目的在于克服现有技术的不足,提供一种煤矿用处理冒顶的机器人,能够代替人进入顶板冒落区域进行作业,并能够对冒顶区域形成临时支护,为冒落空间的处理创造安全条件。
本申请的技术方案提供一种煤矿用处理冒顶的机器人,包括行进机构、纵向伸缩机构、第一旋转机构、支护机构和防护板,所述防护板与所述支护机构连接,所述纵向伸缩机构设置在所述行进机构上,所述第一旋转机构设置在所述纵向伸缩机构上,所述支护机构设置在所述第一旋转机构上。
优选地,还包括喷浆机械手,所述喷浆机械手设置在所述行进机构上。
优选地,所述喷浆机械手包括喷枪和机械臂,所述喷枪设置在所述机械臂端部,所述机械臂通过第二旋转机构安装在所述行进机构上。
优选地,所述机械臂包括基架、伸缩臂、举升油缸和摆动机构,所述基架安装在所述第二旋转机构上,所述伸缩臂一端与所述基架连接,另一端与所述摆动机构连接,所述喷枪与所述摆动机构连接,所述举升油缸一端与所述基架铰接,另一端与所述伸缩臂铰接,所述举升油缸用于驱动所述伸缩臂上下摆动。
优选地,所述摆动机构包括用于带动所述喷枪绕第一轴线摆动的第一摆动缸、用于带动所述喷枪绕第二轴线摆动的第二摆动缸和用于带动所述喷枪绕第三轴线摆动的摆动装置,所述第一摆动缸与所述伸缩臂端部连接,所述第二摆动缸与所述第一摆动缸连接,所述摆动装置与所述第二摆动缸连接,所述喷枪与所述摆动装置连接,所述第一轴线、所述第二轴线和所述第三轴线相互垂直。
优选地,所述摆动装置包括固定架、马达、偏心盘、摇摆架、万向联轴器和辅助弹簧,所述马达设置在所述固定架上,所述马达与所述偏心盘连接并驱动所述偏心盘转动,所述摇摆架一端与所述偏心盘偏心连接,另一端通过所述万向联轴器与所述固定架连接,所述辅助弹簧一端与所述摇摆架连接,另一端与所述固定架连接,所述喷枪设置在所述摇摆架上。
优选地,所述支护机构上设有用于固定所述防护板的固定机构。
优选地,还包括防护围栏,所述防护围栏可拆卸安装在所述支护机构上。
优选地,所述纵向伸缩机构包括若干相对滑动设置的第一套筒以及用于推动各个所述第一套筒做相对滑动的第一升降油缸,所述第一升降油缸与所述第一套筒连接。
优选地,若干所述第一套筒相互滑动套接。
采用上述技术方案后,具有如下有益效果:本方案通过使用机器人替代人工进入冒顶区域进行作业,并能够为对冒顶区域提供临时支护,为冒落区域的处理创造安全条件,保证了工作人员的安全。
附图说明
参见附图,本申请的公开内容将变得更易理解。应当理解:这些附图仅仅用于说明的目的,而并非意在对本申请的保护范围构成限制。图中:
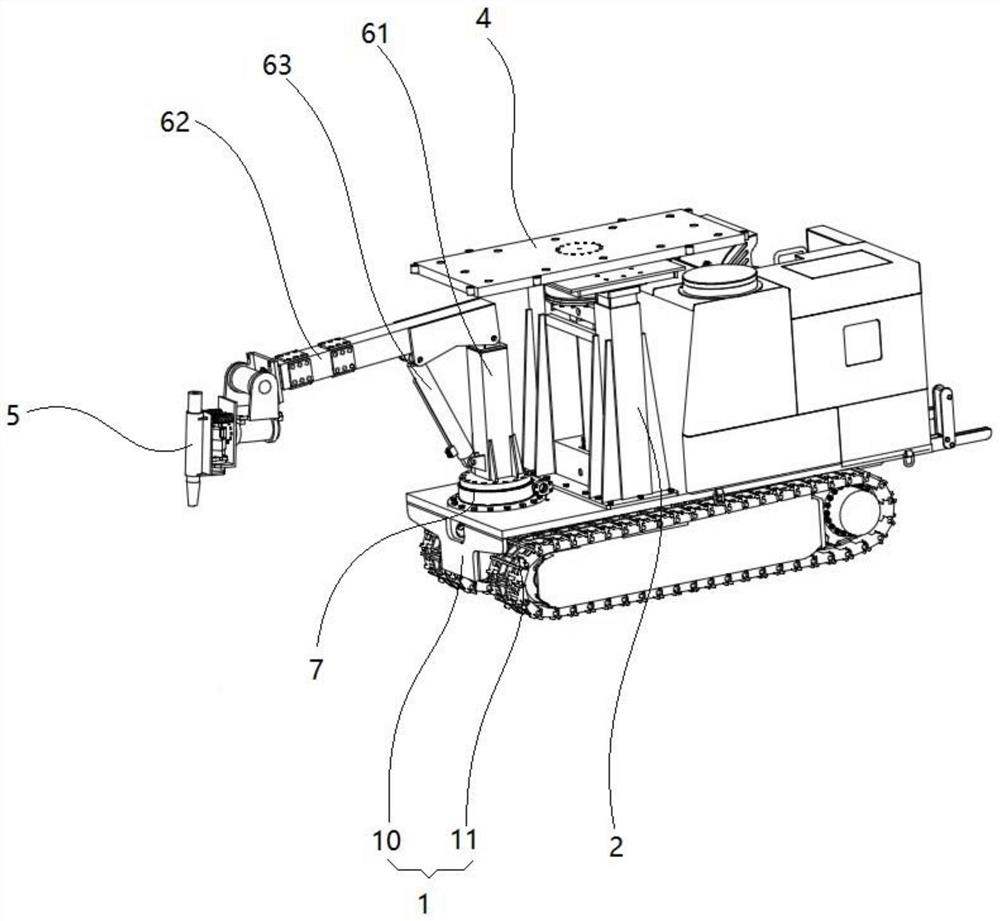
图1是本发明在一个实施例中整体结构示意图;
图2是本发明在一个实施例中纵向伸缩机构收缩状态时的结构示意图;
图3是本发明在一个实施例中纵向伸缩机构伸展状态时的结构示意图;
图4是本发明在一个实施例中机械臂的结构示意图;
图5是本发明在一个实施例中伸缩臂的结构示意图;
图6是本发明在一个实施例中摆动装置的结构示意图;
图7是本发明在一个实施例中支护联架的结构示意图;
图8是本发明在一个实施例中使用状态示意图。
附图标记对照表:
行进机构1:安装平台10、履带轮11;
纵向伸缩机构2:支护外筒21、支护中筒22、支护内筒23、一级油缸24;
支护机构4:电磁铁41、支护联架42、开孔421;
机械臂6:基架61、伸缩臂62、一级伸缩筒621、二级伸缩筒622、第二升降油缸623、安装板624、举升油缸63、摆动装置64、固定架641、马达642、偏心盘643、摇摆架644、万向联轴器645、辅助弹簧646、第一摆动缸65、连接板651、第二摆动缸66;
第一旋转机构3、喷枪5、第二旋转机构7、防护围栏8、喷浆机9。
具体实施方式
下面结合附图来进一步说明本申请的具体实施方式。
容易理解,根据本申请的技术方案,在不变更本申请实质精神下,本领域的一般技术人员可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本申请的技术方案的示例性说明,而不应当视为本申请的全部或视为对申请技术方案的限定或限制。
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于各附图中所示的构造进行定义的,它们是相对的概念,因此有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连接”、“相连”应做广义理解,例如,可以是固定连接,也可以可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个组件内部的连通。对于本领域的普通技术人员而言,可以视具体情况理解上述属于在本申请中的具体含义。
本发明在一些实施例中公开了一种煤矿用处理冒顶的机器人,包括行进机构1、纵向伸缩机构2、第一旋转机构3、支护机构4和防护板(图未示),防护板与支护机构4连接,纵向伸缩机构2设置在行进机构1上,第一旋转机构3设置在纵向伸缩机构2上,支护机构4设置在第一旋转机构3上。
在本装置中,行进机构1能够在机器人提供行进动力,通过行进机构1行驶至冒顶区域,到达冒顶区域后,通过第一旋转机构3带动支护机构4进行旋转,使得放置在支护机构4上的防护板旋转至合适的角度,然后纵向伸缩机构2向上将支护机构4抬伸举起,使得防护板上提对冒顶区域进行临时支撑,形成安全环境,提高工作人员作业的安全性。另外,本机器人在非使用状态或者行进时,纵向伸缩机构2可以进行向下收缩以减少机器人的整体高度,同时第一旋转机构3也可以带动支护机构4进行旋转,以使得放置在支护机构4上的防护板能够旋转至其长度方向与机器人的长度方向一致,从而减少机器人整体的宽度,进而使得机器人能够减少整体占用的空间大小,能够在狭小空间内灵活行动。
在本发明的一些实施例中,还包括喷浆机械手,喷浆机械手设置在行进机构1上。通过喷浆机械手可以在完成冒顶区域临时支护后对冒顶区域进行喷浆填充,从而完成冒顶巷道修复作业工作。
在本发明的一些实施例中,喷浆机械手包括喷枪5和机械臂6,喷枪5设置在机械臂6端部,机械臂6通过第二旋转机构7安装在行进机构1上。第二旋转机构7可以用于控制机械臂6的位置,使得机械臂6能够实现360°的旋转,完成多方位的喷浆,机械臂6可以摆动,从而适应不同高度位置的喷浆工作。
在本发明的一些实施例中,机械臂6包括基架61、伸缩臂62、举升油缸63和摆动机构,基架61安装在旋转机构上,伸缩臂62一端与基架61连接,另一端与摆动机构连接,喷枪5与摆动机构连接,举升气缸一端与基架61铰接,另一端与伸缩臂62铰接,举升气缸用于驱动伸缩臂62上下摆动。
在进行喷浆工作的时候,通过旋转机构调整伸缩臂62的位置,然后伸缩臂62可上下摆动以使得喷枪5对准所需喷浆区域进行喷射,同时通过举升气缸对伸缩臂62进行推动,使得伸缩臂62能够上下摆动,摆动机构直接与喷枪5连接,在通过伸缩臂62、第二旋转机构7和举升油缸63将喷浆移动至喷浆区域后,在喷浆过程中再通过摆动机构对喷枪5进行小范围的摆动,从而扩大喷浆区域。本机械臂6能够多方位活动和调整,以满足不同空间位置的喷浆需求,同时在行进过程或者无需执行喷浆任务的时候,伸缩臂62可以收缩减少空间的占用,以便于机器人能够在狭小空间中行进和作业。
在本发明的一些实施例中,摆动机构包括用于带动喷枪5绕第一轴线摆动的第一摆动缸65、用于带动喷枪5绕第二轴线摆动的第二摆动缸66和用于带动喷枪5绕第三轴线摆动的摆动装置64,第一摆动缸65与伸缩臂62端部连接,第二摆动缸66与第一摆动缸65连接,摆动装置64与第二摆动缸66连接,喷枪5与摆动装置64连接,第一轴线、第二轴线和第三轴线相互垂直。
第一摆动缸65用于调整喷浆角度,可作180°旋转,第二摆动缸66用于调整喷浆的前后方向,可作360°旋转,摆动装置64用于固定喷枪5位置以及控制喷枪5摆动,以扩大喷浆的面积。
在本发明的一些实施例中,摆动装置64包括固定架641、马达642、偏心盘643、摇摆架644、万向联轴器645和辅助弹簧646,马达642设置在固定架641上,马达642与偏心盘643连接并驱动偏心盘643转动,摇摆架644一端与偏心盘643偏心连接,另一端通过万向联轴器645与固定架641连接,辅助弹簧646一端与摇摆架644连接,另一端与固定架641连接,喷枪5设置在摇摆架644上。马达642带动偏心盘643旋转,同时由于摇摆架644与偏心盘643偏心连接,因此在偏心盘643旋转的时候,摇摆架644会随偏心盘643旋转而做摆动动作,从而使得喷枪5做摆动动作,改变喷浆方向,增大喷枪5的喷射范围。另外,在摇摆架644摇摆的时候,可以通过辅助弹簧646的弹力作用对摇摆架644提供支撑作用帮助摇摆架644更好地复位,避免摇摆架644卡死。
在本发明的一些实施例中,支护机构4上设有用于固定防护板的固定机构。通过固定机构能够将防护板牢固地固定在支护机构4上,避免防护板的抬伸或者支护的时候掉落或者位置发生偏移,特别地,固定机构为电磁铁41,多个电磁铁41布置在支护机构4的表面上,在需要进行固定的时候,电磁铁41通电并通过电磁铁41的磁力吸附作用能够将防护板牢固地吸附在支护机构4上,从而保证防护板在使用和运输过程中不会脱落,在需要拆卸或更换防护板的时候,只需要断开电磁铁41的通电,电磁铁41则对防护板失去吸附作用力,即可将防护板和支护机构4分离。
在本发明的一些实施例中,还包括防护围栏8,防护围栏8可拆卸安装在支护机构4上。通过设置防护围栏8,支护机构4还能够作为升降平台使用,在需要进行承载工作人员进行对顶板修复作业工作时,只需要将防护围栏8安装在支护机构4上即可,无需另搭架体,在正常临时支护工作的时候,只需将防护围栏8拆卸下来即可。
在本发明的一些实施例中,纵向伸缩机构2包括若干相对滑动设置的第一套筒以及用于推动各个第一套筒做相对滑动的第一升降油缸,第一升降油缸与第一套筒连接。在进行对支护机构4抬升的时候,多个第一升降油缸推动多个第一套筒,使得多个第一套筒相对滑动展开,从而将支护机构4向上抬起。在无需执行支护工作的时候,多个第一套筒能够相对滑动收缩,从而降低支护机构4的高度以及减少机器人整体高度。
在本发明的一些实施例中,若干第一套筒相互滑动套接。
实施例1:
本实施例公开一种煤矿用处理冒顶的机器人,如图1所示,其包括行进机构1、纵向伸缩机构2、第一旋转机构3、支护机构4、防护板以及喷浆机械手,喷浆机械手和纵向伸缩机构2均安装设置在行进机构1上,支护机构4安装在纵向伸缩机构2上,防护板与支护机构4连接。
其中行进机构1用于为机器人提供行进动力,本实施例中所采用的行进机构1为履带式行进装置,其包含两组平行设置的履带轮11以及安装平台10,通过履带轮11可以使得本装置适应复杂路况进行行进,同时也可以通过调整两组履带轮11之间的行进速度以实现行进机构1行进方向的改变。
在本实施例中,如图4所示,所采用的喷浆机械手包括喷枪5和机械臂6,其中喷枪5安装在机械臂6的端部,喷枪5外接喷浆机9,喷浆机9将浆液输送至喷枪5喷出。机械臂6通过第二旋转机构7安装在行进机构1的前部,第二旋转机构7通过过渡板安装固定在安装平台10上,其中第二旋转机构7为电动旋转盘,第二旋转机构7可绕图示Z轴方向做360°旋转,从而使得机械臂6能够实现360°的旋转,完成多方位的喷浆。
具体地,本实施例中的机械臂6包括基架61、伸缩臂62、举升油缸63和摆动机构,其中基架61的下端固定安装在第二旋转机构7上,伸缩臂62的一端与基架61上端转动连接,另一端与摆动机构连接,摆动机构与喷枪5连接,举升气缸一端与基架61铰接,另一端与机械臂6铰接,通过举升气缸可控制机械臂6做上下摆动动作。在进行喷浆工作的时候,首先通过第二旋转机构7调整伸缩臂62的位置,通过举升气缸带动伸缩臂62摆动调整喷枪5的前后位置和上下位置,然后再通过伸缩臂62伸缩进一步调整喷枪5的高度位置和前后位置,以使得喷枪5到达所需喷浆的位置,然后在喷浆过程中再通过摆动机构对喷枪5进行小范围的摆动调整,从而扩大喷浆区域。本机械臂6能够实现喷枪5在如图4所示的X、Y、Z方向上的位置调整,同时能够通过第二旋转机构7实现喷枪5绕Z方向旋转,实现多方位多角度的活动和调整,以满足不同空间位置的喷浆需求,同时在行进过程或者无需执行喷浆任务的时候,伸缩臂62可以收缩减少空间的占用,以便于机器人能够在狭小空间中行进和作业。
具体地,本实施例中的摆动机构如图4所示包括第一摆动缸65、第二摆动缸66和摆动装置64,其中,在伸缩臂62的端部设置有安装板624,安装板624与伸缩臂62的端部固定连接,第一摆动缸65安装在安装板624上,第一摆动缸65通过连接板651与第二摆动缸66连接,连接板651沿Y向布置,连接板651的一端与第一摆动缸65连接,另一端与第二摆动缸66连接,第一摆动缸65驱动连接板651转动,从而带动第二摆动缸66绕沿X向布置的第一轴线转动,其中由于在安装板624对连接板651的转动起到限位作用,连接板651可作180°的旋转,通过第一摆动缸65可以用于调整喷枪5的角度。第二摆动缸66与摆动装置64连接,第二摆动缸66用于带动喷枪5绕沿Z向布置的第二轴线转动,第二摆动缸66可带动摆动装置64做360°旋转。摆动装置64与喷枪5连接固定在一起,通过摆动装置64可以固定喷枪5的位置以及带动喷枪5绕沿Y向布置的第三轴线摆动,从而使得喷枪5在喷浆的时候在一定范围内摆动,以扩大喷浆的面积。
在本实施例中,如图6所示,摆动装置64包括固定架641、马达642、偏心盘643、摇摆架644、万向联轴器645和辅助弹簧646,其中固定架641与第二摆动缸66连接,第二摆动缸66控制固定架641做旋转运动。马达642设置在固定架641上,马达642与偏心盘643连接并可驱动偏心盘643旋转,摇摆架644的一端与偏心盘643偏心连接,另一端通过万向联轴器645与固定架641连接,在万向联轴器645的两端各对称设置有一个辅助弹簧646,弹簧的一端与摇摆架644连接,另一端与固定架641连接,喷枪5固定安装在摇摆架644上并跟随摇摆架644动作。在本摆动装置64中,马达642带动偏心盘643转动,偏心盘643带动摇摆架644绕沿Y向布置的第三轴线转动,使得摇摆架644做周期性的摇摆动作,从而带动喷枪5做摆动动作,因而喷枪5在喷浆的时候可以朝不同位置进行喷射,扩大喷浆面积。优选地,摇摆架644能够绕第三轴线做90度范围内的往复摇摆,在摇摆架644摆动的时候,摇摆架644的另一端通过万向联轴器645进行支撑,摆动时万向联轴器645跟随摇摆架644摆动而动作,因而不会影响固定架641的动作,同时在万向联轴器645的两侧各设置有辅助弹簧646,通过辅助弹簧646可以对摇摆架644提供支撑作用,在摇摆架644摆动的时候,借助辅助弹簧646的弹力作用可以帮助摇摆架644更好复位,避免摇摆架644卡死。
在本实施例中,所采用的伸缩臂62为多级伸缩臂或单级伸缩臂,具体地,如图5所示,伸缩臂62包括若干相互滑动套接在一起的第二套筒组成,本实施例中,第二套筒包括一级伸缩筒621和二级伸缩筒622,其中二级伸缩筒622滑动套设在一级伸缩筒621的外壁面,使得二级伸缩筒622可沿一级伸缩筒621方向滑动,一级伸缩筒621和二级伸缩筒622内部均为空心,在二级伸缩筒622内安装设置有第二升降油缸623,其中第二升降油缸623与一级伸缩筒621连接并驱动一级伸缩筒621动作,一级伸缩筒621的端部与摆动装置64连接,二级伸缩筒622的端部与基架61转动连接,在需要伸长伸缩臂62的时候,通过第二升降油缸623推动一级伸缩筒621相对于二级伸缩筒622往外推动,即可伸长伸缩臂62,同理,在需要缩短伸缩臂62的时候,通过第二升降油缸623推动一级伸缩筒621相对于二级伸缩筒622往内拉动,即可缩短伸缩臂62,在缩短伸缩臂62的时候,最短可将一级伸缩筒621完全收入二级伸缩筒622内。本实施例中所采用的伸缩臂62除了上述采用一级伸缩筒621和二级伸缩筒622组成以外,还能够增设更多级的第二伸缩筒,上述仅用于举例说明。
支护机构4上设置有用于固定防护板的固定机构,防护板能够对冒顶区域进行临时支撑,形成安全的作业环境。在本实施例中,如图2所示,所采用的固定机构为若干设置在支护机构4表面的电磁铁41,在需要进行固定的时候,电磁铁41通电并通过电磁铁41的磁力吸附作用能够将防护板牢固地吸附在支护机构4上,从而保证防护板在使用和运输过程中不会脱落,在需要拆卸或更换防护板的时候,只需要断开电磁铁41的通电,电磁铁41则对防护板失去吸附作用力,即可将防护板和支护机构4分离。除此以外,固定机构还能够采用如卡扣、绑带等其他装置对防护板进行固定。
在本实施例中,如图2、3所示,纵向伸缩机构2包括若干个相对滑动套接的第一套筒以及推动第一套筒做相对滑动的第一升降油缸,具体地,本实施例中第一套筒包括支护外筒21、支护中筒22和支护内筒23,其中支护外筒21安装设置在行进机构1上,支护外筒21为中空,支护中筒22滑动设置在支护外筒21内,支护中筒22同样为中空,支护内筒23滑动设置在支护中筒22内,即支护外筒21、支护中筒22和支护内筒23依次滑动套接在一起,支护内筒23的上端与支护机构4连接固定在一起。其中在本实施例中第一升降油缸包括一级油缸24和二级油缸,其中一级油缸24与支护中筒22连接带动支护中筒22动作,一级油缸24设置在支护中筒22外部,且其推动杆与支护中筒22的外壁连接。二级油缸与支护内筒23连接,带动支护内筒23动作,二级油缸设置在支护中筒22的内部,其推动杆与支护内筒23的内壁连接。通过设置一级油缸24和二级油缸可以增大纵向伸缩机构2的举升力量,从而保证能够有足够的支撑力形成临时支护。在进行抬升时,两个油缸分别推动支护中筒22和支护内筒23滑动展开,从而将支护机构4向上抬起,在无需执行支护工作的时候,支护外筒21、支护中筒22和支护内筒23可相对滑动收缩起来,从而降低支护机构4的高度以及减少机器人整体高度,便于机器人在狭小空间内行进或动作。本实施例中,可以根据需求增加第一套筒个数的设置以及增加第一升降油缸个数的设置,本实施例仅用于举例说明。
具体地,在本实施例中,如图2所示,支护内筒23的上端与支护联架42固定在一起,第一旋转机构3安装在支护联架42上,其中如图7所示,支护联架42上具有开孔421,第一旋转机构3的旋转部穿过开孔421与支护机构4连接固定在一起。本实施例中,第一旋转机构3为电动旋转盘,可带动支护机构4做360°的旋转动作,从而调整支护机构4的角度和方向。
特别地,本装置还包括有电气系统,电气系统包括矿用语音灯光信号装置、矿用隔爆兼本质安全型真空电磁起动器、矿用照明灯以及电源,电源为矿用语音灯光信号装置、矿用隔爆兼本质安全型真空电磁起动器和矿用照明灯供电。
另外,本装置还包括连接本装置中纵向伸缩机构2、喷浆机械手、第一旋转机构3、第二旋转机构7和行进机构1的控制系统、与控制系统远程连接的控制器以及与控制系统连接的摄像装置,工作人员可以通过控制器对机器人进行远程可视化控制。
在作业行进中,如图1所示,本装置中的纵向伸缩机构2下降至最低位置,且第一旋转机构3旋转使得装载在支护机构4上的防护板旋转至其长度方向与车辆行进方向一致,第二旋转机构7转动使得机械臂6朝向车辆前方,举升油缸63带动伸缩臂62下摆至伸缩臂62与基架61呈垂直状态,此时机器人占用空间的宽度和高度最小,机器人在行进的时候由行进机构1驱动进入至作业区域,如若在行进过程中出现弯道时,可以对第一旋转机构3和第二旋转机构7进行调整,以使得机器人能够更好地通过弯道。行进到冒顶区域的时候,通过第一旋转机构3带动支护机构4进行旋转,使得防护板旋转至合适的角度,一般需要将防护板旋转至与车辆长度方向垂直,然后再通过纵向伸缩机构2向上将支护机构4抬伸举起,从而使得防护板的两端与冒顶区域接触,实现对冒顶区域的临时支撑,形成安全环境,提高工作人员作业的安全性。在形成临时支撑后,通过第二旋转机构7和举升气缸调整喷枪5的位置,使得喷枪5到达喷浆区域,然后再喷浆的时候再通过摆动机构进行小范围的摆动,对冒顶区域进行喷浆填充。特别地,在进行临时支护的时候,还能够在防护板和地面之间放置单体液压支柱对防护板两侧的支护区域进行加固,加强支护安全性。本机器人可替代人力进入至冒顶区域进行作业,提高了作业的安全性,同时既能够地冒顶区域进行临时支护,也能够对冒顶区域进行喷浆加固,极大地提高了作业的安全性和施工效率。机器人能够适应狭小环境作业和行进,适应性强。
实施例2:
本实施例与实施例1相似,不同之处在于,在本实施例中,如图8所示,还包括防护围栏8,防护围栏8可拆卸安装在支护机构4上,具体地,在支护机构4的四周设置有若干个安装槽,在防护围栏8的底端设置有若干与安装槽相匹配的卡接头,在需要进行承载工作人员进行对顶板修复作业工作时,只需要将防护围栏8底端的卡接头卡入至安装槽内安装即可在支护机构4上形成安全围护区域,可供工作人员站立避免工作人员从支护机构4上掉落,无需另搭架体,在正常临时支护工作的时候,只需将防护围栏8拆卸下来即可。
以上的仅是本申请的原理和较佳的实施例。应当指出,对于本领域的普通技术人员来说,在本申请原理的基础上,还可以做出若干其它变型,也应视为本申请的保护范围。
- 一种煤矿用处理冒顶的机器人
- 一种采煤机机载式冒顶处理机器人及其施工方法