用于机械化桥的避障方法及系统、架设方法及系统
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及工程机械领域,具体地,涉及一种用于机械化桥的避障方法及系统、架设方法及系统。
背景技术
现有技术中,机械化桥的架设过程通常是按照人为预先设定好的固定架设流程进行架设,例如按照固定的展桥角度和放桥角度完成桥体的展桥动作和放桥动作。然而,机械化桥的实际应用环境通常较为复杂且不可预测,例如,架设路线中可能存在障碍物,按照固定的架设流程无法适应较为复杂的现场环境,故现有技术存在环境适应性较差的问题。
发明内容
本发明的目的是提供一种用于机械化桥的避障方法、用于机械化桥的架设方法、处理器、用于机械化桥的避障系统、用于机械化桥的架设系统、机械化桥以及存储介质,以解决现有技术存在的环境适应性较差的问题。
为了实现上述目的,本发明实施例第一方面提供一种用于机械化桥的避障方法,机械化桥包括架桥车和桥体,架桥车与桥体通过连接件连接,桥体包括至少两个桥节,避障方法包括:
获取障碍物的第一位置信息;
根据桥节中距离架桥车最近的桥节与水平面之间的第一角度和桥节之间的第二角度确定桥体的末端的第二位置信息;
根据第二位置信息确定桥体的末端与连接件之间的第一距离;
根据第一位置信息和第二位置信息确定障碍物与连接件之间的第二距离;
在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离;。
控制桥体完成放桥动作和展桥动作。
在本发明实施例中,桥体的末端设置桥体支腿;避障方法还包括:根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开。
在本发明实施例中,根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开,包括:确定第一角度的正弦值与桥节完全展开时的桥体长度的乘积值;在乘积值等于桥体支腿的长度的情况下,控制桥体支腿展开。
在本发明实施例中,用于机械化桥的避障方法还包括:在乘积值等于桥体支腿的长度的情况下,控制障碍物检测装置停止工作。
在本发明实施例中,调节第一角度和第二角度包括:控制展桥液压绞盘的收放以调节第一角度;控制展桥油缸的伸缩以调节第二角度。
本发明实施例第二方面提供一种用于机械化桥的架设方法,机械化桥包括架桥车和桥体,桥体包括多个桥体支腿,桥体支腿包括支腿油缸,架设方法包括:
在机械化桥的展开过程中检测到障碍物的情况下,根据上述的用于机械化桥的避障方法避开障碍物,以实现桥体的展开;
获取桥体支腿的支反力;
根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定;
控制桥体支腿与桥体锁定;
控制桥体和架桥车分离,以完成机械化桥的架设动作。
在本发明实施例中,用于机械化桥的架设方法还包括:在支反力位于预设支反力范围内的情况下,确定各支反力的方差;根据方差和预设方差阈值确定桥体支腿的稳定情况。
在本发明实施例中,控制桥体支腿与桥体锁定包括:通过锁止机构控制桥体支腿与桥体锁定。
在本发明实施例中,支腿油缸包括支腿横移油缸,支腿横移油缸用于带动桥体支腿做横向运动;锁止机构包括第一锁止装置、第二锁止装置、液压插销以及接触开关,第一锁止装置设置在桥体支腿上,第一锁止装置的中间设置有第一孔;第二锁止装置设置在桥体的末端,第二锁止装置的中间设置有第二孔,第二锁止装置与第一锁止装置之间的间隔距离等于支腿横移油缸的最大行程;液压插销与第一锁止装置连接,液压插销能够穿过第一孔和第二孔;接触开关,设置在第二锁止装置的末端;通过锁止机构控制桥体支腿与桥体锁定,包括:控制支腿横移油缸动作以带动桥体支腿横向运动,直至第一锁止装置与第二锁止装置接触;控制液压插销伸出直至液压插销穿过第一锁止装置和第二锁止装置以接触接触开关,以从而完成桥体支腿与桥体的锁定。
本发明实施例第三方面提供一种处理器,被配置成执行根据上述的用于机械化桥的避障方法或者根据上述的用于机械化桥的架设方法。
本发明实施例第四方面提供一种用于机械化桥的避障系统,机械化桥包括架桥车和桥体,架桥车与桥体通过连接件连接,桥体包括至少两个桥节,避障系统包括:障碍物检测装置,设置于桥体的末端,用于检测障碍物的第一位置信息;第一角度检测装置,用于检测桥节中距离架桥车最近的桥节与水平面之间的第一角度;第二角度检测装置,用于检测桥节之间的第二角度;控制器,与障碍物检测装置、第一角度检测装置以及第二角度检测装置电连接,控制器被配置成:获取障碍物的第一位置信息;根据第一角度和第二角度确定桥体的末端的第二位置信息;根据第二位置信息确定桥体的末端与连接件之间的第一距离;根据第一位置信息和第二位置信息确定障碍物与连接件之间的第二距离;在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离;控制桥体完成放桥动作和展桥动作。
本发明实施例第五方面提供一种用于机械化桥的架设系统,机械化桥包括架桥车和桥体,桥体包括多个桥体支腿,桥体支腿包括支腿油缸,架设系统包括:根据上述的用于机械化桥的避障系统;支反力检测装置,设置于桥体支腿上,用于检测桥体支腿的支反力;控制器,与用于机械化桥的避障系统、支反力检测装置电连接,控制器被配置成:在机械化桥的展开过程中检测到障碍物的情况下,根据上述的用于机械化桥的避障方法避开障碍物,以实现桥体的展开;获取桥体支腿的支反力;根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定;控制桥体支腿与桥体锁定;控制桥体和架桥车分离,以完成机械化桥的架设动作。
本发明实施例第六方面提供一种机械化桥,包括:桥体,包括至少两个桥节;架桥车,与桥体通过连接件连接;以及根据上述的用于机械化桥的避障系统或者根据上述的用于机械化桥的架设系统。
本发明实施例第七方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,指令在被处理器执行时使得处理器执行根据上述的用于机械化桥的避障方法或者根据上述的用于机械化桥的架设方法。
上述技术方案,通过获取障碍物的第一位置信息,根据第一角度和第二角度确定桥体的末端的第二位置信息,进而根据第二位置信息确定桥体的末端与转轴中心之间的第一距离,并根据第一位置信息和第二位置信息确定障碍物与转轴中心之间的第二距离,在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离。上述技术方案根据障碍物与转轴中心的距离以及桥体末端与转轴中心的距离的大小关系,对机械化桥的放桥和展桥的动作进行实时调整以完成避障,和现有技术中根据预设的固定架设流程相比,增强了机械化桥对于复杂环境的自适应性,实现了桥体的自动化架设,缩短了架设时间,提高了架设效率。
本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
图1示意性示出了本发明一实施例中用于机械化桥的避障方法的流程示意图;
图2示意性示出了本发明一实施例中锁止机构的结构示意图;
图3示意性示出了本发明一实施例中锁止机构的结构放大示意图;
图4示意性示出了本发明一实施例中用于机械化桥的避障系统的结构示意图;
图5示意性示出了本发明一实施例中动力单元工作速度曲线的示意图;
图6示意性示出了本发明另一实施例中用于机械化桥的避障方法的流程示意图;
图7示意性示出了本发明一实施例中机械化桥的预定架设轨迹出现障碍物的示意图;
图8示意性示出了本发明一实施例中机械化桥展桥放桥动作配合避障的示意图;
图9示意性示出了本发明一实施例中超声波测距传感器停止工作的示意图;
图10示意性示出了本发明另一实施例中用于机械化桥的避障系统的结构示意图;
图11示意性示出了本发明一实施例中机械化桥的整车结构示意图;以及
图12示意性示出了本发明一实施例中用于机械化桥的架设方法的流程示意图。
附图标记说明
1 拉杆 2 升降架
3 活动臂 4 桥节1
5 展桥机构 6 桥节2
7 架设支腿 8 升降架油缸
9 展桥液压绞盘 10 锁桥油缸
11 桥体横向调节油缸 12 活动臂油缸
13 展桥油缸 14 桥脚液压绞盘
15 支腿油缸 16、100 支腿横移油缸
20 第一锁止装置 30 第二锁止装置
40 液压插销 50 接触开关
402 障碍物检测装置 404 第一角度检测装置
406 第二角度检测装置 408 控制器
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
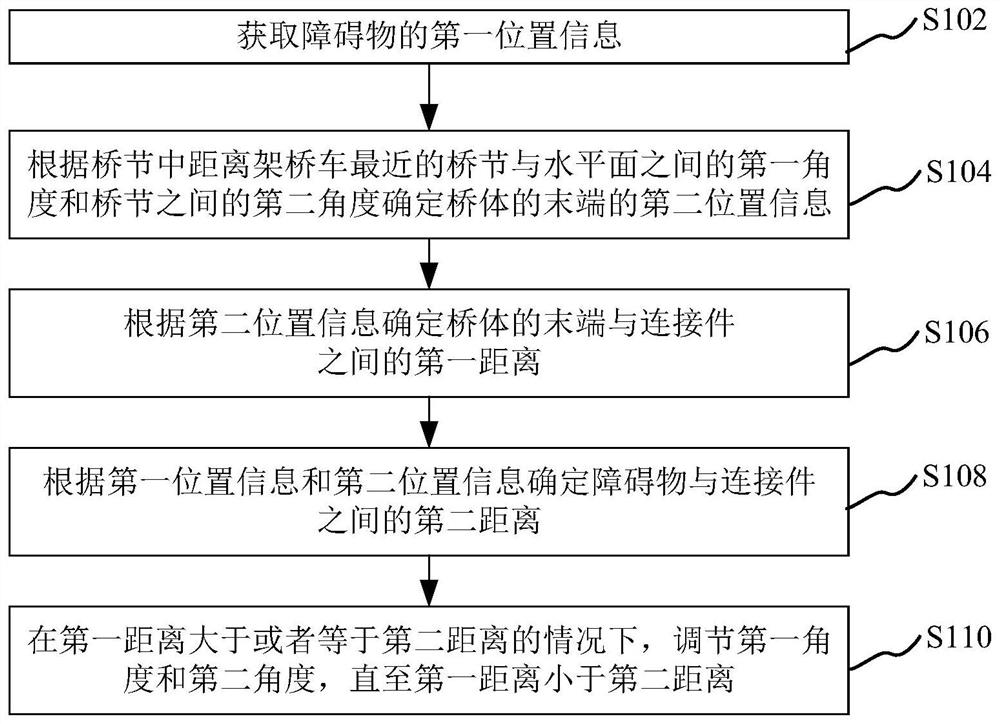
图1示意性示出了本发明一实施例中用于机械化桥的避障方法的流程示意图。如图1所示,在本发明实施例中,提供了一种用于机械化桥的避障方法,机械化桥包括架桥车和桥体,架桥车与桥体通过连接件连接,桥体包括至少两个桥节,以该避障方法应用于控制器为例进行说明,该避障方法可以包括以下步骤:
步骤S102,获取障碍物的第一位置信息。
步骤S104,根据桥节中距离架桥车最近的桥节与水平面之间的第一角度和桥节之间的第二角度确定桥体的末端的第二位置信息。
步骤S106,根据第二位置信息确定桥体的末端与连接件之间的第一距离。
步骤S108,根据第一位置信息和第二位置信息确定障碍物与连接件之间的第二距离。
步骤S110,在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离。
可理解地,第一位置信息为桥体架设过程中桥体附近出现的障碍物的位置信息,具体可以通过障碍物检测装置检测得到,障碍物检测装置可以包括但不限于超声波测距传感器、激光传感器以及机器视觉传感器等,具体可以设置在桥体的末端,以超声波测距传感器为例进行说明,其检测范围可以是半径为预设值的扇形区域,检测宽度区域可以为整个桥宽。第一角度为桥节中距离架桥车最近的桥节与水平面之间的角度,第二角度为桥节与桥节之间的展开角度,第一角度和第二角度可以通过角度检测装置检测得到,角度检测装置可以包括但不限于倾角传感器等。第二位置信息为桥体的末端的位置信息。连接件位于架桥车与桥体之间,用于连接架桥车与桥体,具体可以包括连接臂或活动臂等。第一距离为桥体的末端与连接件之间的距离,以连接件为活动臂为例,第一距离可以是桥体的末端与活动臂上的某一位置(例如转轴中心)之间的距离。第二距离为障碍物与连接件之间的距离,同样以连接件为活动臂为例,第二距离可以是障碍物与活动臂上的某一位置(例如转轴中心)之间的距离。
具体地,当某一障碍物出现在桥体设定的架设轨迹上,导致原架设空间预判不足时,控制器可以通过障碍物检测装置获取障碍物的第一位置信息,并可以通过角度检测装置获取桥节中距离架桥车最近的桥节与水平面之间的第一角度和桥节之间的第二角度,进而根据第一角度和第二角度确定桥体的末端的第二位置信息,基于第一角度和第二角度确定桥体末端的第二位置信息,例如将第一角度和第二角度输入至预先确定的机械化桥的运动模型,得到该运动模型的输出结果即为桥体末端的第二位置信息。进一步地,可以基于预先确定的机械化桥的运动模型,根据第二位置信息确定桥体的末端与转轴中心之间的第一距离,并根据第一位置信息和第二位置信息确定障碍物与转轴中心之间的第二距离,从而将第一距离和第二距离进行比较,在第一距离大于或者等于第二距离的时候,调节第一角度和第二角度。具体地,控制器可以基于预先确定的机械化桥的运动模型,对放桥动作和和展桥动作进行实时调整,直至桥体的末端与连接件之间的第一距离小于障碍物与连接件之间的第二距离,即可避开障碍物。进一步地,在一些实施例中,在避开障碍物后,控制器控制桥体完成继续放桥动作和展桥动作,即继续放桥和展桥以进行桥体的架设。
上述用于机械化桥的避障方法,通过获取障碍物的第一位置信息,根据第一角度和第二角度确定桥体的末端的第二位置信息,进而根据第二位置信息确定桥体的末端与转轴中心之间的第一距离,并根据第一位置信息和第二位置信息确定障碍物与转轴中心之间的第二距离,在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离。上述技术方案根据障碍物与转轴中心的距离以及桥体末端与转轴中心的距离的大小关系,对机械化桥的放桥和展桥的动作进行实时调整以完成避障,和现有技术中根据预设的固定架设流程相比,增强了机械化桥对于复杂环境的自适应性,实现了桥体的自动化架设,缩短了架设时间,提高了架设效率。
在一个实施例中,桥体的末端设置桥体支腿;避障方法还可以包括:根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开。
具体地,对于机械化桥来说,桥体的末端设置有桥体支腿,在放桥和展桥的过程中,控制器可以根据桥节中距离架桥车最近的桥节与水平面之间的第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开,其中,桥节完全展开时的桥体长度和桥体支腿的长度为固定值,可以预先存储。
在一个实施例中,根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开,包括:确定第一角度的正弦值与桥节完全展开时的桥体长度的乘积值;在乘积值等于桥体支腿的长度的情况下,控制桥体支腿展开。
具体地,当桥体到达预定架设位置,即此时桥节中距离架桥车最近的桥节与水平面的第一角度θ2满足以下公式:
L·sinθ2=R
其中,L为桥体支腿的长度,θ2为第一角度,R为桥节完全展开时的桥体长度。
此时,控制器可以控制桥体支腿展开,并继续放桥完成架设动作。
在本发明实施例中,通过具体的算法公式明确确定桥体支腿展开的时机,可以提高桥体的架设效率。
在一个实施例中,避障方法还可以包括:在乘积值等于桥体支腿的长度的情况下,控制障碍物检测装置停止工作。
具体地,当桥节中距离架桥车最近的桥节与水平面的第一角度θ2满足上述关系式的时候,控制器可以控制障碍物检测装置(例如,超声波测距传感器)停止工作,继续放桥完成架设动作。
在本发明实施例中,在桥体支腿开始展开的时候,控制器控制障碍物检测装置停止工作,可以防止障碍物检测装置误将桥体支腿当成障碍物从而影响桥体架设过程。
在一个实施例中,调节第一角度和第二角度包括:控制展桥液压绞盘的收放以调节第一角度;控制展桥油缸的伸缩以调节第二角度。
可以理解,机械化桥的动力驱动系统包含机械化桥中所有的动力单元,包括展桥液压绞盘和展桥油缸等动力部件,在不同架设阶段中,动力单元部件可以根据控制器的指令完成机械化桥的架设/撤收动作。
具体地,控制器通过控制展桥液压绞盘的收放调整桥节中距离架桥车最近的桥节与水平面的第一角度,以及控制展桥油缸的伸缩调节桥节之间的第二角度,以此调整桥体姿态。
本发明另一实施例还提供了一种用于机械化桥的架设方法,机械化桥包括架桥车和桥体,桥体包括多个桥体支腿,桥体支腿包括支腿油缸,以该架设方法应用于控制器为例进行说明,该架设方法可以包括:在机械化桥的展开过程中检测到障碍物的情况下,根据上述实施例中的用于机械化桥的避障方法避开障碍物,以实现桥体的展开;获取桥体支腿的支反力;根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定;控制桥体支腿与桥体锁定;控制桥体和架桥车分离,以完成机械化桥的架设动作。
可以理解,支反力即支腿的受力,也就是地面对该支腿的支撑力,具体可以通过支反力检测装置检测得到,支反力检测装置可以包括但不限于支反力传感器。预设支反力范围为预先确定的表征桥体支腿架设稳定的支反力阈值范围。
具体地,控制器在控制机械化桥展开时,若检测到障碍物,则可以根据上述实施例中的用于机械化桥的避障方法避开障碍物,从而实现桥体的展开。然后控制器可以获取桥体支腿的支反力,并根据该支反力调节该桥体支腿的支腿油缸的伸出量,直至该支反力处于预设支反力范围内,例如,当某一个桥体支腿的支反力大于预设支反力范围的上限时,控制器可以控制该支腿的支腿油缸的伸长量减小,当某一个桥体支腿的支反力小于预设支反力范围的下限时,控制器可以控制该支腿的支腿油缸的伸长量增大,当各支腿的支反力处于预设支反力范围内时,表明桥体支腿架设稳定。在桥体支腿架设稳定后,控制器可以控制桥体支腿与桥体锁定,具体可以通过控制锁止机构动作以将架设稳定的桥体支腿和桥体锁定。在完成桥体支腿与桥体的锁定后,控制器可以控制桥体和架桥车分离,具体可以收回用于连接架桥车和桥体的连接件,并控制架桥车离开架桥位置,桥体和架桥车的分离表明机械化桥架设完成。
上述用于机械化桥的架设方法,在机械化桥的展开过程中通过上述实施例中的用于机械化桥的避障方法进行避障,以实现桥体的展开,进而获取桥体支腿的支反力,根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定,并控制桥体支腿与桥体锁定,从而控制桥体和架桥车分离,以完成机械化桥的架设动作。上述技术方案,通过根据桥体支腿的支反力来调节支腿油缸的伸出量,以使得桥体支腿架设稳定,不需要人工判断桥体支腿的稳定情况,减少了对操作人员的依赖程度,提高了机械化桥的架设效率,在桥体支腿架设稳定后控制桥体支腿与桥体锁定,可以进一步提高机械化桥架设的稳定性和可靠性。
在一个实施例中,用于机械化桥的架设方法还包括:在支反力位于预设支反力范围内的情况下,确定各支反力的方差;根据方差和预设方差阈值确定桥体支腿的稳定情况。
可以理解,预设方差阈值为预先设置的方差值,具体可以根据实际情况确定。
具体地,为了进一步确定桥体支腿的稳定情况,使得桥体支腿的稳定性更高,当各个支腿的支反力都位于支反力范围内时,控制器可以进一步根据各支反力确定支反力的方差,从而比较支反力的方差与预设方差阈值,在该支反力的方差小于预设方差阈值的时候,控制器可以确定桥体支腿是非常稳定的。当该支反力的方差大于预设方差阈值的时候,控制器可以确定桥体支腿处于基本稳定的状态,但是稳定性不是非常高。
在一个实施例中,控制桥体支腿与桥体锁定包括:通过锁止机构控制桥体支腿与桥体锁定。
可理解地,锁止机构用于将已经架设稳定的桥体支腿与桥体进行锁定,其具体结构可以是常见的锁止机构,例如齿轮啮合式、螺栓助力式等锁止机构。
在一个实施例中,如图2和图3所示,支腿油缸包括支腿横移油缸100,支腿横移油缸100用于带动桥体支腿做横向运动,锁止机构包括第一锁止装置20、第二锁止装置30、液压插销40以及接触开关50,第一锁止装置20设置在桥体支腿上,第一锁止装置20的中间设置有第一孔;第二锁止装置30设置在桥体的末端,第二锁止装置30的中间设置有第二孔,第二锁止装置30与第一锁止装置20之间的间隔距离等于支腿横移油缸10的最大行程;液压插销40与第一锁止装置20连接,液压插销40能够穿过第一孔和第二孔;接触开关50,设置在第二锁止装置30的末端;通过锁止机构控制桥体支腿与桥体锁定,包括:控制支腿横移油缸100动作以带动桥体支腿横向运动,直至第一锁止装置20与第二锁止装置30接触;控制液压插销40伸出直至液压插销40穿过第一锁止装置20和第二锁止装置30以接触接触开关50,以完成桥体支腿与桥体的锁定。
可以理解,第一孔和第二孔的孔径大小可以相同,也可以不同,设置第一孔和第二孔的目的是使得液压插销40穿过第一锁止装置20和第二锁止装置30以接触到第二锁止装置30末端的接触开关50,从而触发锁桥信号,控制器在接收到该锁桥信号之后确定锁桥动作完成。
具体地,如图2和图3所示的锁止机构,接触开关50用于检测各架设部件是否运动到指定位置,为架设/撤收动作的完成提供了判断依据。控制器可以根据预先设定的支腿横移油缸100的最大行程,推动桥体支腿向两侧移动,当支腿横移油缸100运动至最大行程时,第一锁止装置20与第二锁止装置30接触,此时桥体支腿架设稳定,控制器可以控制液压插销40伸出,液压插销40依次穿过第一锁止装置20和第二锁止装置30从而接触接触开关50,触发锁桥信号,并反馈该锁桥信号给控制器,标志锁桥动作完成,从而完成桥体支腿与桥体的锁定。
在一个实施例中,第一锁止装置20和/或第二锁止装置30可以是虎头锁。
在一个实施例中,第一锁止装置20和/或第二锁止装置30可以为挡板。
在一个实施例中,接触开关50可以是触点开关。
本发明实施例还提供了一种处理器,被配置成执行根据上述实施例中的用于机械化桥的避障方法。
本发明实施例还提供了一种处理器,被配置成执行根据上述实施方式中的用于机械化桥的架设方法。
图4示意性示出了本发明一实施例中用于机械化桥的避障系统的结构示意图。如图4所示,在本发明实施例中,提供了一种用于机械化桥的避障系统,机械化桥包括架桥车和桥体,架桥车与桥体通过连接件连接,桥体包括至少两个桥节,该避障系统包括:障碍物检测装置402,用于检测障碍物的第一位置信息;第一角度检测装置404,用于检测桥节中距离架桥车最近的桥节与水平面之间的第一角度;第二角度检测装置406,用于检测桥节之间的第二角度;控制器408,与障碍物检测装置402、第一角度检测装置404以及第二角度检测装置406电连接,被配置成:获取障碍物的第一位置信息;根据第一角度和第二角度确定桥体的末端的第二位置信息;根据第二位置信息确定桥体的末端与连接件之间的第一距离;根据第一位置信息和第二位置信息确定障碍物与连接件之间的第二距离;在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离。
具体地,障碍物检测装置402可以包括但不限于超声波测距传感器、激光传感器以及机器视觉传感器,用于检测架设过程中桥体附近出现的障碍物的位置信息,可对放桥和展桥动作轨迹进行实时优化调整。障碍物检测装置402可以安装在桥体的末端,以超声波测距传感器为例进行说明,其检测范围可以是半径为预设值的扇形区域,检测宽度区域可以为整个桥宽。第一位置信息为障碍物的位置信息。第一角度检测装置404可以包括但不限于倾角传感器,用于检测桥节中距离架桥车最近的桥节与水平面之间的角度,可以安装在桥节中距离架桥车最近的桥节上,用于辅助桥体的放桥、架设。第一角度为桥节中距离架桥车最近的桥节与水平面之间的角度。第二角度检测装置406可以包括但不限于倾角传感器,用于检测桥节之间的角度,可以安装在任一桥节上用于检测展桥过程中的桥节之间的实际展桥角度。以包括两个桥节的桥体为例进行说明,桥体包括桥节1和桥节2,第二角度检测装置406可以安装在桥节2上用于检测展桥过程中桥节1和桥节2之间的实际展桥角度。第二角度为桥节之间的展开角度。第二位置信息为桥体的末端的位置信息。
控制器408可以与障碍物检测装置402、第一角度检测装置404以及第二角度检测装置406电连接,当某一障碍物出现在桥体设定的架设轨迹上,导致原架设空间预判不足时,控制器408可以通过障碍物检测装置402获取障碍物的第一位置信息,并根据第一角度检测装置404检测到的第一角度和第二角度检测装置406检测到的第二角度确定桥体的末端的第二位置信息,基于第一角度和第二角度确定桥体末端的第二位置信息,并根据第二位置信息确定桥体的末端与连接件之间的第一距离,进一步根据第一位置信息和第二位置信息确定障碍物与连接件之间的第二距离,并将第一距离和第二距离进行比较,在第一距离大于或者等于第二距离的时候,调节第一角度和第二角度,具体地,控制器408可以基于预先确定的机械化桥的运动模型,对放桥动作和和展桥动作进行实时调整,直至桥体的末端与转轴中心之间的第一距离小于障碍物与转轴中心之间的第二距离,即可避开障碍物。进一步地,在一些实施例中,在避开障碍物后,控制器408控制桥体完成放桥动作和展桥动作,即继续放桥和展桥以进行桥体的架设。
上述用于机械化桥的避障系统,通过障碍物检测装置检测障碍物的第一位置信息,通过第一角度检测装置检测桥节中距离架桥车最近的桥节与水平面之间的第一角度,通过第二角度检测装置检测桥节之间的第二角度,控制器在获取障碍物的第一位置信息之后,根据第一角度和第二角度确定桥体的末端的第二位置信息,进而根据第二位置信息确定桥体的末端与转轴中心之间的第一距离,并根据第一位置信息和第二位置信息确定障碍物与转轴中心之间的第二距离,在第一距离大于或者等于第二距离的情况下,调节第一角度和第二角度,直至第一距离小于第二距离,从而控制桥体完成放桥动作和展桥动作。上述技术方案通过控制器和障碍物检测装置、第一角度检测装置以及第二角度检测装置的配合,根据障碍物与转轴中心的距离以及桥体末端与转轴中心的距离的大小关系,对机械化桥的放桥和展桥的动作进行实时调整以完成避障,和现有技术中根据预设的固定架设流程相比,增强了机械化桥对复杂环境的自适应性,实现了桥体的自动化架设,缩短了架设时间,提高了架设效率。
在一个实施例中,桥体的末端设置桥体支腿;控制器408还被配置成:根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开。
具体地,对于机械化桥来说,桥体的末端设置有桥体支腿,在展桥和放桥过程中,控制器408可以根据桥节中距离架桥车最近的桥节与水平面之间的第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开,其中,桥节完全展开时的桥体长度和桥体支腿的长度可以预先存储。
在一个实施例中,控制器被配置成根据第一角度、桥节完全展开时的桥体长度以及桥体支腿的长度之间的关系控制桥体支腿展开,包括:确定第一角度的正弦值与桥节完全展开时的桥体长度的乘积值;在乘积值等于桥体支腿的长度的情况下,控制桥体支腿展开。
具体地,当桥体到达预定架设位置,即此时桥节中距离架桥车最近的桥节与水平面的第一角度θ2满足以下公式:
L·sinθ2=R
其中,L为桥体支腿的长度,θ2为第一角度,R为桥节完全展开时的桥体长度。
此时,控制器408控制桥体支腿展开,并继续放桥完成架设动作。
在本发明实施例中,通过具体的算法公式明确桥体支腿展开的时机,可以提高桥体的架设效率。
在一个实施例中,控制器还被配置成:在乘积值等于桥体支腿的长度的情况下,控制障碍物检测装置402停止工作。
具体地,当桥节中距离架桥车最近的桥节与水平面的第一角度θ2满足上述公式的时候,第一角度检测装置404反馈信号给控制器408,障碍物检测装置402(例如,超声波测距传感器)停止工作,继续放桥完成架设动作。
在本发明实施例中,在桥体支腿开始展开的时候,控制器408控制障碍物检测装置402停止工作,可以防止障碍物检测装置402误将桥体支腿当成障碍物从而影响桥体架设过程。
在一个实施例中,控制器被配置成调节第一角度和第二角度,包括:控制展桥液压绞盘的收放以调节第一角度;控制展桥油缸的伸缩以调节第二角度。
可以理解,动力驱动系统包含机械化桥中所有的动力单元,包括展桥液压绞盘和展桥油缸等动力部件,在不同架设阶段中,动力单元部件可以根据控制器408的指令完成机械化桥的架设/撤收动作。
具体地,控制器408通过控制展桥液压绞盘的收放调整桥节中距离架桥车最近的桥节与水平面的第一角度,以及控制展桥油缸的伸缩调节桥节之间的第二角度,以此调整桥体姿态。
在一个实施例中,控制器408对各架设机构的动作幅度和动力单元的工作速度设置了自动关联控制。动力单元的工作速度主要包括各液压油缸的伸缩速度和液压绞盘的出/收绳速度,当架设流程固定时,控制器408由预先设置的动作幅值确定动力单元的最大安全工作速度Vmax。当架设过程遇到障碍需要对架设动作进行调整时,控制器408可以基于架设机构的运动模型,根据架设机构的初始位置和目标位置信息,确定运动轨迹进和运动幅值,进而计算出架设流程调整后新动作对应的最大安全工作速度Vmax。通过对动力单元的工作速度进行斜坡处理,如图5所示,使架设机构在最短的时间内平稳到达预定位置,节省救援时间,同时保证各架设动作的平顺性。动力部件的动力来源可以由架桥车提供,通过可自动脱拔的液压接头与架桥车连接,在完成架设动作后可随着架桥车的离开自动与架桥车分离。
本发明实施例还提供了一种用于机械化桥的架设系统,机械化桥包括架桥车和桥体,桥体包括多个桥体支腿,桥体支腿包括支腿油缸,架设系统包括:根据上述实施例中的用于机械化桥的避障系统;支反力检测装置,设置于桥体支腿上,用于检测桥体支腿的支反力;控制器,与用于机械化桥的避障系统、支反力检测装置电连接,被配置成:在机械化桥的展开过程中检测到障碍物的情况下,根据上述实施例中的用于机械化桥的避障方法避开障碍物,以实现桥体的展开;获取桥体支腿的支反力;根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定;控制桥体支腿与桥体锁定;控制桥体和架桥车分离,以完成机械化桥的架设动作。
上述用于机械化桥的架设系统,在机械化桥的展开过程中通过上述实施例中的用于机械化桥的避障系统进行避障,以实现桥体的展开,进而通过支反力检测装置获取桥体支腿的支反力,控制器根据支反力调节支腿油缸的伸出量,直至支反力处于预设支反力范围内,以使得桥体支腿架设稳定,并控制桥体支腿与桥体锁定,从而控制桥体和架桥车分离,以完成机械化桥的架设动作。上述技术方案,通过根据桥体支腿的支反力来调节支腿油缸的伸出量,以使得桥体支腿架设稳定,不需要人工判断桥体支腿的稳定情况,减少了对操作人员的依赖程度,提高了机械化桥的架设效率,在桥体支腿架设稳定后控制桥体支腿与桥体锁定,可以进一步提高机械化桥架设的稳定性和可靠性。
在一个实施例中,控制器还被配置成:在支反力位于预设支反力范围内的情况下,确定各支反力的方差;根据方差和预设方差阈值确定桥体支腿的稳定情况。
在一个实施例中,该架设系统还包括锁止机构,控制器通过锁止机构控制桥体支腿与桥体锁定。
在一个实施例中,支腿油缸包括支腿横移油缸,支腿横移油缸用于带动桥体支腿做横向运动;锁止机构包括第一锁止装置、第二锁止装置、液压插销以及接触开关,第一锁止装置设置在桥体支腿上,第一锁止装置的中间设置有第一孔;第二锁止装置设置在桥体的末端,第二锁止装置的中间设置有第二孔,第二锁止装置与第一锁止装置之间的间隔距离等于支腿横移油缸的最大行程;液压插销与第一锁止装置连接,液压插销能够穿过第一孔和第二孔;接触开关,设置在第二锁止装置的末端;控制器还被配置成:控制支腿横移油缸动作以带动桥体支腿横向运动,直至第一锁止装置与第二锁止装置接触;控制液压插销伸出直至液压插销穿过第一锁止装置和第二锁止装置以接触接触开关,以完成桥体支腿与桥体的锁定。
本发明实施例提供了一种机械化桥,包括:桥体,包括至少两个桥节;架桥车,与桥体通过连接件连接;以及根据上述实施方式中的用于机械化桥的避障系统或者根据上述实施方式中的用于机械化桥的架设系统。
在一个实施例中,架桥车包括位于架桥车末端的升降架,升降架通过活动臂与桥体连接,升降架与活动臂连接的位置为转轴中心。
图6意性示出了本发明另一实施例中用于机械化桥的避障方法的流程示意图。图7示意性示出了本发明一实施例中机械化桥的预定架设轨迹出现障碍物的示意图。图8示意性示出了本发明一实施例中机械化桥展桥放桥动作配合避障的示意图。图9示意性示出了本发明一实施例中超声波测距传感器停止工作的示意图。
桥体避障的控制逻辑可以如图6所示,在本发明一实施例中,机械化桥的桥体可以包括两个桥节,即桥节1和桥节2,安装在桥节1上的倾角传感器(也就是第一角度检测装置)用于辅助桥体的放桥、架设,安装在桥节2上的倾角传感器(也就是第二角度检测装置)用于检测展桥过程中桥节1和桥节2之间的实际展桥角度。超声波测距传感器(也就是障碍物检测装置)用于检测架设过程中桥体附近出现的障碍,可对放桥和展桥动作轨迹进行实时优化调整。超声波测距传感器安装在桥节2尾部下方,其检测范围是半径为R1的扇形区域,检测宽度区域为整个桥宽。当救援现场某一障碍A(如电线和工作的挖掘机)出现在桥体设定的架设轨迹上,导致原架设空间预判不足时,如图7所示,超声波测距传感器反馈障碍A的位置信息给主控制系统,主控制系统(也就是控制器)中断之前设定的架设流程,基于机械化桥的运动模型,对放桥动作和和展桥动作进行实时调整,通过控制展桥液压绞盘的收放调整桥节1与水平面的倾角θ,以及控制展桥油缸的伸缩调节桥节1和桥节2之间的角度α,以此调整桥体姿态,直到桥节2末端运动轨迹的半径R2小于障碍A与转轴中心的距离S,即可避开碍物,继续放桥进行桥体的架设,如图8所示。
如图9所示,当桥体到达预定架设位置,即此时桥节1与水平面的倾角为θ2满足(L·sinθ2=R)时,位于桥节1上的倾角传感器反馈信号给主控制系统,超声波测距传感器停止工作,继续放桥完成架设动作。
图10示意性示出了本发明另一实施例中用于机械化桥的避障系统的结构示意图。图11示意性示出了本发明一实施例中机械化桥的整车结构示意图。如图10和图11所示,用于机械化桥的控制系统包括主控制系统、位置检测系统、动力驱动系统和机械架设系统等。架设过程中主控制系统发出信号控制动力驱动系统,为机械化桥的展开和撤收提供动力来源。位置检测系统负责检测机械架设系统和动力驱动系统的实时状态,并反馈给主控制系统作为判断依据。机械架设系统为机械化桥的架设和撤收提供必要的结构基础。
主控制系统相当于车辆的ECU,负责控调节架桥车的整个架设流程。根据位置检测系统反馈的位置信息,判断机械化桥所处的架设状态,并控制动力驱动系统开展架设和撤收等相关动作。主控制系统通过程序指令完成所有架设步骤,该程序包括若干指令用以使得单片机、芯片或处理器执行本申请各个流程上述方法的全部或部分步骤。主控制系统配备有辅助操纵面板,同时可由人工辅助操作。
机械架设系统主要包括升降架2、活动臂3、桥体(桥节1和2)、展桥机构5和架设支腿7等机械结构,为桥体的架设、展开和撤收提供必要的结构基础,如图11所示,升降架2通过升降架油缸8的驱动带动桥体90度翻转;活动臂3通过液压插销与桥体节1铰接,通过位于其内部的活动臂油缸12实现桥体、升降架2之间的分离与结合;桥体由桥节1和桥节2构成,通过展桥液压绞盘9的牵引实现桥体的收放动作;展桥机构5通过展桥油缸13的驱动实现桥节1和2之间的展收;架设支腿7通过桥脚液压绞盘14的牵引实现支腿的收放,通过支腿内部的支腿油缸15实现支腿高度的调节。
位置检测系统的特点说明如下:位置检测系统主要包含安装在各架设部件上的倾角传感器、触点开关、支反力传感器、光电传感器和超声波测距传感器等。倾角传感器用于检测各架设部件间的位置关系,如安装在副车架上的倾角传感器用于检测架桥车底盘是否调平,安装在升降架上的倾角传感器用于检测升降架的实际翻转角度,安装在桥节1上的倾角传感器用于辅助桥体的放桥、架设,安装在桥节2上的倾角传感器用于检测展桥过程中桥节1和桥节2之间的实际展桥角度,位于架设支腿上的倾角传感器用于检测支腿的收放情况。倾角传感器为主控制系统判断架设机构所处状态提供了依据。
动力驱动系统包含机械化桥中所有的动力单元,包括升降架油缸、展桥油缸、活动臂油缸、桥脚支腿油缸以及展桥液压绞盘、桥脚液压绞盘和锁桥液压插销等动力部件。在不同架设阶段中,动力单元部件根据主控制系统的指令完成机械化桥的架设/撤收动作。
主控制系统对各架设机构的动作幅度和动力单元的工作速度设置了自动关联控制。动力单元的工作速度主要包括各液压油缸的伸缩速度和液压绞盘的出/收绳速度;当架设流程固定时,主控制系统由预先设置的动作幅值确定动力单元的最大安全工作速度Vmax。当架设过程遇到障碍需要对架设动作进行调整时,主控制系统基于预先确定的架设机构的运动模型,根据架设机构的初始位置和目标位置信息,确定运动轨迹进和运动幅值,进而计算出架设流程调整后新动作对应的最大安全工作速度Vmax。通过对动力单元的工作速度进行斜坡处理,如图2所示,使架设机构在最短的时间内平稳到达预定位置,节省救援时间,同时保证各架设动作的平顺性。
动力部件的动力来源由架桥车提供,通过可自动脱拔的液压接头与架桥车连接,在完成架设动作后可随着架桥车的离开自动与架桥车分离。
图12示意性示出了本发明一实施例中用于机械化桥的架设方法的流程示意图。下面结合机械化桥中间段桥跨的架设过程,对本发明实现机械化桥自动架设的具体实施方法进行说明,其总体流程如图12所示:
(1)、架桥车就位:主控制系统控制架桥车进入架桥位,红外发射器发出平行红外光,主控制系统根据红外接收器反馈的位置信息,左右调整架桥车方向,直到架桥车中轴线在桥体中轴线设定的角度和距离偏差阈值内,架桥车直线行走,停在距离上一段桥跨末端S的位置处,标志着此动作完成。
(2)、放稳定架桥车支腿:主控制系统控制架桥车支腿液压油缸伸出,根据底盘上倾角传感器反馈的信号,调整底盘支腿油缸的伸出量,直到架桥车底盘的倾角值在设定的阈值范围内,停止底盘倾角调整,标志着此动作完成。
(3)、升降架展开:主控制系统根据升降架运动范围确定升降架油缸工作的最大安全速度Vmax,使升降架在最短的时间内平稳到达预定位置,根据升降架上倾角传感器反馈的数值,完成此项动作。
(4)、放桥与展桥:展桥油缸伸出驱动桥节1、2展开,展桥液压绞盘放绳牵引桥体放落,在正常架设过程中,两者交替进行完成展桥和放桥动作。设置每次展桥的进给角度为δ,位于桥节2上的倾角传感器在每次完成展桥进给角度后反馈信号给主控制系统,标志一次展桥动作完成;主控制系统发出信号开始放桥动作,设置每次放桥的进给角度为β,位于桥节1上的倾角传感器在每次完成放桥进给角度后反馈信号给主控制系统,标志着一次放桥动作完成。液压绞盘与展桥油缸交替动作n次后,桥体完全展开,两桥节呈180°(δ·n=180°),标志着此动作完成;当某一无法清除的障碍A出现在桥体设定的架设轨迹上时,超声波测距传感器反馈障碍A的位置信息给主控制系统,主控制系统中断设定的架设流程,基于机械化桥的运动模型,对放桥动作和和展桥动作进行实时调整,通过控制展桥液压绞盘的收放调整桥节1与水平面的倾角θ,以及控制展桥油缸的伸缩调节桥节1和桥节2之间的角度α,以此调整桥体姿态避开障碍物,完成展桥和放桥动作。
(5)、释放桥脚:主控制系统根据支腿的运动范围确定脚液压绞盘出绳的最大安全速度Vmax,使桥脚支腿在最短的时间内平稳到达预定位置,根据支腿上倾角传感器反馈的数值,完成此项动作。
(6)、调整架设支腿:桥端放下后,架设支腿展开落地。主控制系统根据桥节1上倾角传感器的数值分别调节四个支腿油缸的伸出量,使机械化桥的水平倾角在安全阈值内。然后主控制系统根据四个支腿上支反力传感器反馈的数值实时调整支腿油缸的伸出量,直到四个架设支腿上的支反力F均处于理论计算支反力的阈值内(F1≤F≤F2),且架设支腿支反力数值的总体方差小于设定值,标志着此动作完成。
(7)、桥体桥脚锁定:主控制系统控制液压插销伸出,插销依次穿过桥体与桥脚上的虎头锁,实现桥体与桥脚的锁定,液压插销接触触点开关后反馈信号给主控制系统,标注锁桥动作完成;
(8)、桥车撤离:主控制系统控制依次收回活动臂、升降架和架桥车稳定支腿,在架桥车驶离过程中,动力驱动系统通过可自动脱拔接头与架桥车分离,架桥车驶离桥面,桥车和桥体分离,标志整个架设流程完成。
上述技术方案,实现了机械化桥全流程的自动架设,通过配备位置检测系统,改变了传统方案操作人员手动作业和判断的局限性,减少了现有方案人工调整耗费的救援时间,降低了操作人员的劳动强度,避免了因主观失误导致的安全事故。通过主控制系统和位置检测系统等的配合,可根据救援现场情况对机械化桥的放桥和展桥的动作进行实时调整完成避障,和现有方案中预设好的固定架设流程相比,对复杂环境具有更好的自适应性。通过对动力驱动单元最大工作速度和架设机构运动轨迹的关联控制,可在最短的时间内,使各架设机构平稳地进入架设位置,提高了架设流程的效率和稳定性。
本发明实施例结合了机械化桥的架设技术和智能检测设备,主控制系统通过对动力驱动系统的实时控制和调整,使机械架设系统平稳地完成各架设动作;位置检测系统配备的倾角传感器、超声波传感器和光电传感器,为各架设动作的完成提供了判断依据;通过主控制系统、位置检测系统、动力驱动系统和机械架设系统四部分的联动配合,实现机械化桥全流程的自动架设,增强了对复杂救援环境的自适应能力,降低了操作人员的劳动强度,提高了架设过程的平稳性和效率。
本发明实施例提供了一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得处理器执行根据上述实施方式中的用于机械化桥的避障方法或者根据上述实施方式中的用于机械化桥的架设方法。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。