一种高效率连续采摘鲜食玉米的机器人
文献发布时间:2024-01-17 01:15:20
技术领域
本发明属于农业工程技术领域,特别涉及一种高效率连续采摘鲜食玉米的机器人。
背景技术
玉米是三大主要粮食作物,也是世界范围种植广泛的粮食作物之一,我国对于玉米的栽培具有悠久的历史。近年来,我国的玉米产出持续增加,2020年以来,我国的年均玉米产量在2.6亿吨左右,约占世界玉米产量的23%。我国玉米种植主要分为两种:鲜食玉米和饲料玉米。饲料玉米种植面积广,对籽粒的完整性要求不高,因而市场上广泛的玉米收获机是用于饲料玉米成熟后收获的先进机械。饲料玉米采收机械发展的同时,鲜食玉米的采收方式大部分仍然是传统的人工采收。原因有如下几点:其一,鲜食玉米种植面积较小,个体种植通常不到一亩,承包户种植最多也就十余亩,对比饲料玉米的大规模种植,人工采收完全可以完成对鲜食玉米的采收。其二,鲜食玉米对于籽粒的完整性要求严格,饲料玉米籽粒较硬,最终作为饲料,所以其对籽粒完整性的要求不高,可以使用机械化采收。但鲜食玉米不同,由于其籽粒较为软糯,稍一用力籽粒就会破损,同时鲜食玉米是供人食用的,其对籽粒的完整性十分严格,机械采收稍不注意就会将鲜食玉米的籽粒破坏,导致其无法售卖,造成亏损。人工由于采收经验丰富,对于鲜食玉米采收的力道掌握较为精准,可以更好的采收鲜食玉米。其三,较为成熟的鲜食玉米采收机械造价昂贵,性价比过低。国产的一些鲜食玉米采收机械售价约为几十万元,而欧美的鲜食玉米采收机械甚至达到了一、二百万元。这是因为这些鲜食玉米采收机械绝大部分由柔性材质构成,而柔性材质本身成本就很高,与其花几十万,上百万购买鲜食玉米采收机械,不如花钱雇人对鲜食玉米进行采收。
发明内容
针对上述问题,本发明提出了一种高效率连续采摘鲜食玉米的机器人包括夹持装置、扭动装置、伸缩机构、摆臂装置、旋转平台、升降装置、传输装置、收集箱、履带底盘、摄像装置以及控制系统;
所述夹持装置用于夹持玉米;
所述扭动装置与所述夹持装置连接,通过扭动带动所述夹持装置进行玉米的采摘;
所述伸缩机构的一端与所述扭动装置连接,通过前后直线伸缩运动对所述夹持装置与扭动装置进行调整;
所述摆臂装置与所述伸缩机构的另一端连接,通过在竖直方向上转动,带动所述夹持装置实现垂直方向的位置调整;
所述升降装置作为连接机械件,连接所述机器人的上部分与下部分,所述上部分包括夹持装置、扭动装置、伸缩机构、摆臂装置和旋转平台,所述下部分包括收集箱、履带底盘、摄像装置;
所述旋转平台设置在所述升降装置上,通过水平方向上的转动来调整所述夹持装置水平面的位置;
所述传输装置用于将所述夹持装置采摘的玉米输送给所述收集箱;
所述收集箱用于收集采摘后的玉米;所述夹持装置能够实现对玉米进行不断采收,直至所述收集箱装满;
所述摄像装置用于捕获田间玉米图像,并根据捕获的玉米图像来控制机器人移动到采收玉米的最佳位置;
所述控制系统用于控制玉米的整个采摘过程。
优选地,所述夹持装置为钳式结构,且内部与玉米接触的部分是质地较软的材质。
优选地,所述传输装置包括对钩形方向调整器、与对钩形方向调整器连接的调整区,以及与调整区连接的传输软管。
更优选地,所述对钩形方向调整器包括较直的斜面和较弯曲的面,较直的斜面对准所述夹持装置松开钳口后玉米掉落的位置,较弯曲的面作为缓冲面,防止玉米滑出。
具体地,所述调整区调整玉米的姿势,以让玉米笔直进入所述传输软管中。
优选地,所述收集箱包括缓冲区和收集区两个区域,所述缓冲区设置在所述传输装置的传输软管出口处下方处,且朝向收集区倾斜设置一定角度,以保证玉米能够平稳滚落到收集区内。
更优选地,所述角度为15°。
更优选地,所述缓冲区为柔性材质。
优选地,所述升降装置的升降范围在50cm之内。
具体地,机器人到达采收玉米的最佳位置后,所述旋转平台负责水平方向上的转动以调整位置,所述摆臂装置负责竖直方向上的转动以调整位置,在所述旋转平台和摆臂装置调整之后,若所述夹持装置与玉米还存在偏差,则通过所述伸缩机构作进一步的调整,保证所述夹持装置能够夹住玉米。
本发明的有益效果:本发明的高效率连续采摘鲜食玉米的机器人在技术上有很大的突破。首先,机器人较为小巧,便于携带,可以在几亩地的田间作业;其次本发明的机器人采收全过程与人为采收玉米无差别,可以模拟人为采收玉米的力道,从而使得鲜食玉米的籽粒破损度控制在5%以下,大大降低鲜食玉米籽粒破损;其三,本发明的机器人只在关键采收部位(夹持装置、传输软管、收集箱内)使用柔性材质,一些不接触鲜食玉米的部位采用其他较为便宜材质,使得本发明的机器人造价相对低廉,性价比高。
附图说明
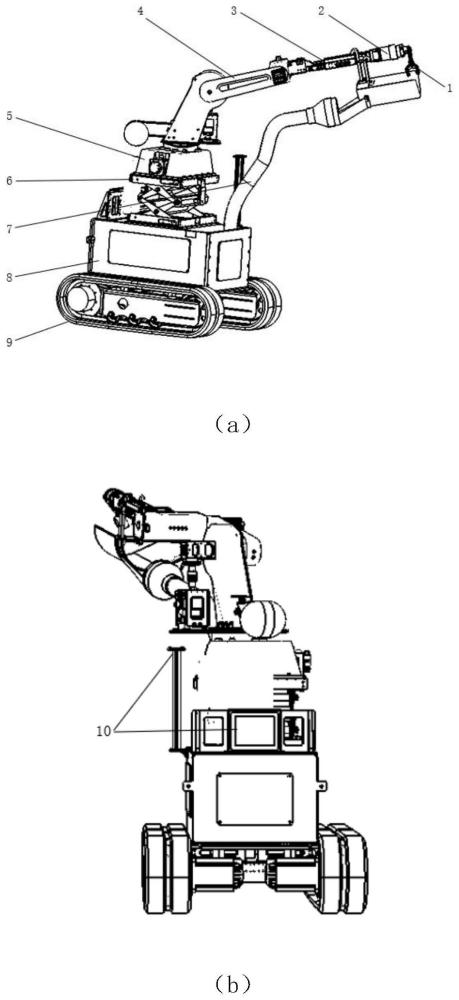
图1(a)、(b)为本发明采收机器人整体结构示意图;
图2(a)、(b)为本发明夹持装置作业时示意图;
图3(a)为本发明的伸缩机构的示意图,(b)为伸缩机构的核心装置——可伸缩机械臂的示意图;(c)为对扭动装置2提供动力的装置的示意图;(d)伸缩臂与提供动力装置的连接处示意图。
图4(a)-(d)为本发明传输装置示意图;其中图4(a)为传输装置整体示意图,图4(b)对构形方向调整器的示意图,图4(c)为对构形方向调整器的横截面图,图4(d)为缓冲区的示意图;
图5(a)和(b)为本发明中收集箱内传输软管出口处的柔性材质示意图;
图6为本发明控制面板功能示意图。
具体实施方式
下面结合附图,对实施例作详细说明。
一种高效率连续采摘的鲜食玉米采收机器人,整体结构如图1所示,主要包括:夹持装置1、扭动装置2、伸缩机构3、摆臂装置4、旋转平台5、升降装置6、传输装置7、收集箱8、履带底盘9、摄像装置10以及控制系统。
夹持装置1整体为钳式结构,如图2所示。夹持装置1内部与玉米接触的部分为质地较软的材质,比如橡胶等。如此设计的好处在于,玉米采收过程中,夹持装置内部与玉米接触部分使用了此类材质,内部表面与玉米接触、挤压过程中,玉米籽粒不会受损,且增大与玉米棒之间的摩擦力,使得玉米棒不会轻易掉落,以确保玉米采收的完整性。夹持装置1与扭动装置2之间的套筒配合连接处安装有伺服电机,伺服电机靠内一端开有类似键槽的装置,其可以控制夹持装置1的下垂、水平、上扬等状态。同时,夹持装置1与扭动装置2之间的类似键槽的装置处装有传感装置,通过传感装置的信号传感,夹持装置1夹住玉米,然后慢慢闭合钳口(钳口只有在夹持玉米情况下为闭合状态,其他状态下均为打开状态);夹持装置1夹住玉米后,传感装置对扭动装置2发出信号,令扭动装置2轻轻扭动,将玉米完好无损地掰下来。
伸缩机构3,如图3(a)所示,主要由可伸缩机械臂与伺服电机组成,伺服电机为该机构的驱动。可伸缩机械臂如图3(b)所示,与伺服电机紧密装配。同时还装配有减速器、扭动装置安装架。伸缩机构3在伺服电机的带动下前后直线伸缩运动,其目的在于对夹持装置1与扭动装置2进行调整,方便采收玉米,在采收玉米之后,可伸缩机械臂缩短,便于传输玉米和下一次的采收。图3(a)中,左边部分与摆臂装置4通过传动轴的螺纹连接,右边部分与扭动装置2螺纹连接。图3(c)和(d)为多个螺钉螺母连接,其中图3(c)示出的是对扭动装置2提供动力的装置,图3(d)是可伸缩机械臂与提供动力装置的连接处示意图。
升降装置6,其采用铝合金的材质,作为本发明中机器人上下部分的连接机械件。其中,夹持装置1、扭动装置2、伸缩机构3、摆臂装置4、旋转平台5为本发明的机器人的上部分;收集箱8、履带底盘9、摄像装置10为本发明的机器人的下部分。升降装置6的升降范围在50cm内,一般不会升高到50cm。一般玉米的高度在1.45m-1.65m,升降装置6升高约15cm,可以使夹持装置1的下垂状态距地面1.35m,升高约35cm可以使夹持装置1的上扬状态距地面1.75m,即夹持装置1的钳口高度范围为1.35m-1.75m。通过调整高度以达到精准采收玉米的效果。
旋转平台5设置在升降装置6上,其可实现水平方向上的转动,从而能够调整夹持装置1水平面的位置。摆臂装置4与伸缩机构3连接,其可在竖直方向上转动,从而可带动夹持装置1实现垂直方向的位置调整。在旋转平台5和摆臂装置4调整之后,还可通过伸缩结构3的伸缩来实现对夹持装置1的位置作进一步的调整,从而保证夹持装置1能够夹住玉米。
传输装置7和收集箱8的设计是本发明的重要创新之处,其目的是实现玉米的连续采摘以提高采收效率,如图4和5所示。夹持装置1夹住玉米后,经由扭动装置2、伸缩机构3等机械件的配合,令玉米轻轻落到下方的对钩形方向调整器上,该对钩形方向调整器为PE材质,其较直的斜面对准夹持装置1松开钳口后玉米掉落的位置,玉米掉落后顺着斜面滚落;较弯曲的一侧是缓冲面,防止玉米滑出该装置导致收集失败。方向调整器末端连接有铝合金材质的调整区,其作用是可让玉米笔直进入调整器末端连通的PE材质的传输软管中,经传输软管慢慢滑落到与其连接的收集箱8内,对玉米进行暂时收集。
收集箱8内分为两个区域:缓冲区和收集区。传输装置7的传输软管出口处下方为收集箱8的缓冲区,缓冲区有柔性材质——橡胶,给予从传输软管滑出的玉米以缓冲作用,保护玉米籽粒的完整性。同时该柔性材质朝向收集区倾斜设置一定角度,优选为15°,可保证玉米能够平稳滚落到收集区内。
夹持装置1可一直对玉米进行采收,这一过程中玉米不断进入收集箱8内。待收集箱8装满后,机器人停止采收,将玉米从机器的收集箱8中放入到其他容器中,如编织袋等。连续采摘的主旨在于通过减少采放的次数,减少采收时间,提高采收效率。
机器人腰部安装有摄像架,摄像架上的平台安装有摄像装置10,可捕获田间玉米图像,并根据捕获的玉米图像来控制机器人移动到采收玉米的最佳位置。
为了适应田间作业的需要,机器人的底盘装有履带,形成履带底盘9,能够在使得机器人在土坡上稳定运动。
控制系统包括PLC控制器、电源、电机驱动器和控制面板。PLC控制器分别与电机驱动器和控制面板连接;电源与控制系统和驱动电机连接。控制面板包含开机按钮、急停按钮以及显示屏,如图6所示。在本发明的一个示例中,显示屏的参数为:屏幕大小10.4英寸,外形尺寸283*225.2*50.1,开孔尺寸272*218,厚度50.1,分辨率1024*768,屏幕比例4:3,安装孔位100*100、75*75。显示屏上所显示内容包括机器人的工作状态、工作进程以及收集箱中收集的玉米的质量。
在采收时,按下机器人的控制面板上的开机按钮,打开显示屏以及摄像装置10。待机器人启动后,机器人会根据机器中的北斗系统设定好的路径控制履带底盘9的移动,摄像装置10自动捕获图像,识别玉米,然后通过控制系统中的传感器检测玉米发出的红外信号,收到信号后控制电路工作,伺服电机执行操作,控制升降装置6、摆臂装置4、旋转平台5、伸缩机构3等的运作,之后伸缩机构3中专为扭动装置2提供动力的装置(图3(c)中示出的)会对扭动装置2提供动力,位于扭动装置2和夹持装置1之间的传感装置会收到该动力指令,根据对图像识别的记忆,利用夹持装置1的钳口夹住玉米,慢慢闭合,直到传感装置检测出玉米对钳口内壁的压力作用时,说明夹持玉米为夹紧状态。然后将玉米扭动进行采集,在收集装置7上方打开钳口,令玉米被收集。此为整个玉米的采收流程。摄像装置10不停捕获图像,直到收集箱中装满玉米。收集箱装满玉米后,机器人停止作业并按设定好的路径返回。此时,需要人为将机器人的收集箱打开,并把收集箱内的玉米倒入先前带来的容器内,然后关闭收集箱,重新按下开机按钮,机器人进行下一组作业,直到田间作业结束。
机器人采收玉米全过程会在显示屏上体现,若发现异常,则可通过远程操控机器人暂停或通过机器人的控制面板上的急停按钮暂停。
此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。